盾构测量误差分析
- 格式:doc
- 大小:197.50 KB
- 文档页数:10

盾构法地铁隧道施工测量误差控制技术措施和方法摘要:现代社会地铁隧道施工过程中经常会使用盾构法,但实际应用期间受到多种外界因素的影响,导致盾构机与隧道衬砌轴线出现偏差,若偏差值超出可控范围,将会为隧道后期施工以及地铁运行留下安全隐患。
针对此,本文将对盾构法施工状态下地铁隧道施工测量误差控制技术进行深入分析,降低实际测量误差,确保地铁隧道施工能够安全顺利展开。
关键词:盾构法地铁隧道施工;测量误差;控制技术;措施与方法前言:盾构机是一种地下掘进机,常用于地铁隧道工程施工过程中,基于其可移动的钢制外壳,隧道开挖施工的同时,还能进行支护、衬砌等多个工序的施工作业,对施工效率有大幅度的提升作用,可充分保障隧道工程施工的安全性,有效防止隧道内壁发生脱落或坍塌等危害。
但这一施工方法受其本身工艺的局限性较大,开挖施工期间必然会发生一定程度的横向贯通误差,例如,开挖准备工作中,起始方位角的测定出现一定偏差,最终引发隧道横向偏差,随着隧道开挖长度的增加,偏差也会越发严重,与其他测量误差情况相互结合,产生横向贯通误差。
因此施工人员必须加强对施工测量误差的重视,以免留下安全隐患。
1.地面施工测量误差控制措施第一,在测量起始控制点时,可利用强制对中标志缓解测量仪器导致的误差。
第二,应用卫星定位控制网,并将相互独立的基线共同组成一定数量的异步环,为卫星定位控制网增强精度与可靠性提供技术支撑。
第三,施工人员需要保障现场导线布设形式的科学性,可结合实际地质情况,运用附合导线或闭合导线等形式进行布设。
第四,保障现场布设附合导线边数与边长的合理性,边数不超过12条为佳,边长需要控制在100米以上,提升其边数与边长控制力度最大化的降低测量角误差。
第五,减少一定数量的控制点个数,增加每个控制点的间距,也能实现导线精度的提升[1]。
2.联系测量误差控制措施联系测量环节是地铁隧道掘进施工主要环节,实际施工期间,测量单位、施工单位以及总承包单位分别利用两井定向、一井定向、导线直接传递等方式进行测量,控制盾构掘进机进行作业。
盾构隧道施工测量误差及精度保证措施摘要:目前我国交通行业和我国信息技术的快速发展,在地铁隧道施工当中盾构法施工是其中一个比较常见的使用方式,盾构属于一个可以支撑地层压力,同时又可以在地层当中进行推进的设备结构,在现阶段的地铁工程开展过程当中对该项技术的运用非常成熟。
盾构的前端设有相应的支撑结构和土体开挖结构,在盾构设备当中具有千斤顶,在盾构的尾部拼装在环片厂预制好的衬砌环。
在当前阶段我国城市地铁的施工当中,对盾构法的应用非常广泛,并且已经取得了良好的工作成果,和传统的地铁工程施工方式进行对比,通过明挖法、浅埋暗挖法等相比,盾构法施工的主要优势在于整个施工流程相对比较安全,同时施工效率较快,不会影响到地面以上的交通通行,同时也不会受到施工的天气条件以及各种岩土条件的影响。
因此,盾构施工是提高整个城市地铁隧道施工的重要方式,而盾构法在施工过程当中的测量工作是保证整个工作流程开展的重要前提。
关键词:盾构法;地铁隧道施工;横向贯通误差;联系测量引言地铁盾构隧道施工是城市轨道交通建设领域的关键内容,但隧道掘进施工难度较大,易对后续的贯通效果带来影响。
对此,应做好贯通测量工作,根据所得结果分析盾构施工情况。
若存在偏差则及时调整,给隧道施工提供正确的引导,以便在短时间内保质保量完成盾构隧道的相关建设工作,实现贯通。
1隧道施工测量误差分析一般而言,隧道工程施工测量时,测量精度会受到多种因素的影响,会导致测量结果与工程情况存在一定的误差,导致最终的计算和复核出现偏差。
总的来说,隧道工程施工测量的误差受到控制网布设、外界因素、测量仪器、以及观测者技术水平等因素的影响,从而给测量结果带来不同程度的测量误差。
在施工测量过程中,测量的准确性与精确度一直以来都是测量工作的重中之重,但是测量误差却无法避免,任何一次测量都会伴随着测量误差的出现进而导致最终计算结果的失真。
综合对比分析工程测量误差的来源,发现导致产生测量误差的主要原因有以下两个方面,进一步的分析有助于测量误差的消减。

地铁盾构隧道贯通测量误差控制与实施摘要:在地铁盾构隧道贯通测量中往往因为施工技术的原因,往往会出现一定的测量误差。
所谓的贯通误差是指在施工贯通的过程中中线无法相互连接,产生相互交错而产生误差。
地铁隧道施工技术误差的控制主要是从工艺、施工人员和仪器进行控制。
在进行误差实施时主要从施工流程、区间控制和定向测量方面进行误差的实施控制。
关键词:地铁隧道测量误差定向测量引言随着我国经济的发展,人们对交通运输业的要求越来越高,地铁作为低碳出行的代表,以其方便快捷的特点逐渐得到了人们的认可,在广大大中型城市被广泛的建设。
在地铁建设的过程中,目前最常使用的施工技术就是盾构法施工,这种施工技术在保证地铁施工质量的同时,还能够保证很好的经济效益。
但是,在地铁盾构隧道贯通测量中往往因为施工技术的原因,会出现一定的测量误差,本文主要围绕着这些测量误差的控制与实施进行相应的论述。
一、地铁盾构隧道贯通测量误差简介在进行误差控制和实施之前,必须要对地铁的盾构隧道贯通测量施工的误差来源进行相应的分析。
根据研究调查显示,测量误差往往来自于以下几个方面,下面我们将对这些误差的来源进行一一的阐述。
首先,所谓的贯通误差是指在施工贯通的过程中中线无法相互连接,产生相互交错而产生误差。
根据误差的形式,又可以分为横向、纵向以及高程的贯通误差。
同样,这些贯通误差形成的原因也是各不相同。
其中最常见的就是横向贯通误差,我们也主要是对这种贯通误差的形成原因进行详细的介绍。
在实际的施工过程中,由于控制网和竖井的测量之间存在着一定的误差,进而造成后续横向贯通误差,而这种横向的贯通误差也是导致隧道贯通测量误差的主要原因。
二、地铁盾构隧道贯通测量误差控制在实际的施工过程中,由于地铁施工往往是进行隧道施工,而与其他的工程相比,隧道施工往往工期较长。
并且,传统的隧道施工往往不需要考虑地下水问题,在进行贯通测量中也容易进行误差的控制。
但是,与传统的地上隧道施工相比,地铁的隧道施工需要考虑诸多问题,施工的环境也更为复杂,在施工的过程中隧道的贯穿施工也更难以控制。

地铁盾构隧道施工的测量误差及改善措施摘要:工程测量是地铁盾构隧道施工中的重要组成部分,直接影响着地铁隧道施工的效率和质量,但是地铁盾构隧道施工环境比较复杂、影响因素较多,导致工程测量精度根本无法保障,工程推进难度也大大增加。
基于这一问题,对地铁隧道盾构测量技术进行简单地阐述分析,深入探讨地铁盾构隧道施工测量的种种影响因素,并制定一套科学完善的测量误差改善方法,能够有效提升地铁盾构隧道的测量精度,使得地铁施工项目发挥出更大的经济效益和社会效益。
关键词:地铁;盾构隧道施工;测量误差;改善措施一、地铁盾构测量概述地铁盾构测量指的是对地铁盾构施工中的地下建筑进行全面细致地测量,除了地质勘测阶段需要工程测量之外,工程施工阶段的测量也必不可少,测量的主要目的是推动地铁盾构施工安全、可靠、稳步推进,确保地铁施工达到预定要求。
盾构法施工具有独特的优势特征,在地铁施工中得到了广泛的普及与应用,地铁盾构随带施工的测量内容如下所示:1)地面控制测量,即在地铁对应的地面上构建高程控制网;2)联系测量,将地面上的坐标、位置、方位、高程等信息传导到地铁隧道当中,构建一个地下地面相结合的坐标体系;3)地下控制测量,具体分为平面测量、高程测量等;4)隧道施工测量,即随着隧道施工推进而开展的持续性测量,根据隧道结构特征进行放样处理,指引隧道开挖以及高程测量。
精准可靠的测量技术,对地铁盾构隧道施工工作尤为重要,具体表现在以下几点:1)在地下测量出隧道盾构施工的中心线、高程等关键数据,保证地铁速调盾构施工的精准度;2)保证地铁隧道挖掘过程中,施工中线在平面以及高程上能够完美对接,保证所有建筑项目稳步推进;3)盾构施工测量不仅要确保盾构隧道施工沿着预设轴线稳步推进,还需要对隧道衬砌环安装情况进行精准测量,确保盾构机经过区间隧道,顺利进入接收井。
二、地铁盾构隧道的测量误差分析(一)盾构测量误差地下工程测量和地面工程测量存在诸多相似之处,但是仍有明显的差异,具体表现在地铁隧道施工是分段进行的,各个工段难以通视,工程测量难度大大攀升,即便出现测量错误,也无法及时检测出来,只有等到隧道挖通之后才能发觉。

盾构法隧道施工测量误差控制技术措施和方法发布时间:2021-11-03T07:16:13.579Z 来源:《建筑学研究前沿》2021年16期作者:洪德洋[导读] 经济的发展,城镇化进程的加快,促进地下隧道建设项目的增多。
广东华隧建设集团股份有限公司 510000摘要:经济的发展,城镇化进程的加快,促进地下隧道建设项目的增多。
盾构法是隧道工程建设工作中较为主流的技术形式,为保证盾构施工效果,则需要严格做好测量工作,减小贯通误差。
但受盾构隧道施工工艺局限性影响,隧道开挖施工会不可避免地出现不同程度的横向贯通误差,比如在隧道开挖施工准备阶段,起始方位角测定偏差,会引起隧道横向偏差,且随隧道开挖长度增加,偏差会逐步扩大,加之多种测量误差影响,易出现隧道横向贯通误差较大的问题。
本文就盾构法隧道施工测量误差控制技术措施和方法展开探讨。
关键词:盾构法隧道施工;误差;控制测量引言盾构是盾构掘进机的简称,是在可以移动的钢结构外壳保护下进行开挖、支护、衬砌等多种作业一体化的施工机械。
盾构隧道也有其局限性,不同于矿山法暗挖、明挖或高架施工,盾构隧道是单向掘进,一方面,起始方位角误差造成的隧道横向偏差将随着隧道掘进长度的增加而同比例增长,另一方面,随着隧道内施工控制导线的延伸,测角误差将逐步累积,测角累积误差带来的隧道横向偏差增长比起始方位角误差带来的偏差更加显著,由于盾构隧道一次成形,如果发生方向偏差将导致不可逆的后果,无法像矿山法一样通过刷补修正,轻者引起调线调坡,导致隧道使用标准降低,重则拆除重建,这样不仅引起巨大的工程损失和工期延误,而且由于结构完整性遭到破坏,为运营期间结构变形埋下了隐患,因此,控制隧道横向偏差是盾构施工测量的关键。
1盾构隧道测量概述盾构法隧道工程施工,需要进行的测量工作主要包括以下几方面。
(1)地面控制测量:在地面上建立平面和高程控制网;(2)联系测量:将地面上的坐标、方向和高程传到地下,建立地面地下统一坐标系统;(3)地下控制测量:包括地下平面和高程控制;(4)隧道施工测量:根据隧道设计进行放样,指导开挖及衬砌的中线和高程测量。
盾构法地铁隧道施工测量误差控制技术措施和方法发布时间:2021-10-09T08:08:45.470Z 来源:《工程建设标准化》2021年14期作者:刘勇,王然[导读] 本文根据笔者在地下测量中的长期经验,以盾构隧道测量为研究对象,刘勇,王然中交隧道工程局有限公司摘要:本文根据笔者在地下测量中的长期经验,以盾构隧道测量为研究对象,研究了盾构隧道测量误差分布及控制措施,首先简要概述了盾构隧道测量的内涵、内容、作用和要求,然后介绍了盾构测量误差,最后深入研究了误差的控制方法,全文是基于笔者长期工作实践的理论升华,认为对从事相关工作的同事具有重要参考价值。
关键词:盾构法;地铁隧道;测量误差;控制技术引言盾构是盾构掘进机的缩写,是在可移动的钢套保护下,将挖掘、支撑、衬砌等多种工作整合在一起的施工机器。
盾构施工的衬彻速度快,对环境影响不大,不影响陆上运输和航行,施工中不受季节、湍流等气候条件的制约,有可能在多种困难的地质条件下施工,在软土含水层中修建具有较大铺设深度的长隧道往往具有技术经济优势。
基于上述优势,盾构隧道的施工如今在地铁施工中得到广泛应用。
但盾构隧道也有其自身的局限性,不同于采矿法规定的隐蔽、开放或高架施工的特点,盾构隧道是单向道路,一方面,由于初始方位误差引起的隧道横向偏差将随着隧道长度的增加而增加。
另一方面,当隧道中的设计控制导线扩展时,测角误差将逐渐积累,导致隧道横向偏差与测角误差的增加,其偏差比与原方位角误差的偏差大得多,因为如果方向偏差导致不可逆的后果,没有办法通过刷补改正,轻则会引起调线调坡,导致隧道使用标准降低,重则会被拆除,不仅造成物品损失巨大,工期延误,而且给运行过程中结构变形带来隐患。
所以,控制隧道横向偏差是测量盾构施工的关键。
本文提供了地铁盾构隧道测量控制措施的一般信息,地铁盾构控制测量的注意事项,盾构推进轴线偏差的监测,对这类工作提供有益的借鉴。
1地铁隧道盾构测量1.1地铁隧道盾构测量的基本内涵地下工程施工期间进行的测量工作,即通常讨论的地下测量,主要包括勘察工程、设计工程、建造施工和操作设施。
浅谈盾构轴线偏差原因及其纠偏措施摘要:盾构法施工轴线控制是盾构法施工重点环节,通过对影响盾构轴线偏差的因素研究与控制进而达到娴熟掌握盾构法施工隧道轴线控制技巧,为以后的盾构法施工提供强有力的技术保证。
关键词:盾构;轴线控制引言盾构法施工轴线控制是盾构法隧道施工的重要环节。
文章对产生盾构轴线偏差的因素进行了分析,并有针对性地提出了防范和监控措施,以确保盾构掘进轴线及成型隧道轴线满足设计及规范要求。
一、产生盾构偏差的原因(一)始发基座的安装与线形始发架及反力架安装不稳及安装位置不符合设计要求,将直接导致盾构机在初始推进时发生位置偏移,甚至始发后轴线控制失控,盾构走形严重偏离隧道设计轴线。
(二)管片拼装盾构机在掘进过程中,随着盾构姿态沿轴线的不断调整,盾构千斤顶产生一定的行程差,通过合理的使用转弯环管片来调整盾构千斤顶的行程差,使管片与盾构机盾尾之间保证必要的盾尾间隙量。
此外,管片拼装的真圆度也影响盾尾间隙量。
(三)同步注浆对轴线控制的影响同步注浆可以及时填充盾尾前移后土体与管片之间产生的间隙,防止土层变形和坍塌,而且注浆量的多少及注浆压力的大小和分布都对轴线控制产生一定的影响。
(四)施工参数设定(1)盾构在不同区间线型中向前推进,盾构环环都在纠偏,区域千斤顶的推力及行程差直接影响盾构姿态。
(2)控制土压的设定值:一般在纠偏时,土压力的设定值比较大,使得千斤顶推力增大,千斤顶各区域调节时容易产生较大的压力差,利于增大土体对机头的反作用力将机头托起或横移。
(3)注浆压力及注浆量。
(五)土质因素在推进施工范围内,尤其开挖面土层变化处,由于不同土质的软硬程度及其承载能力有较大差异,会使盾构机产生不均匀位移,对盾构姿态造成一定的不良影响。
(六)地下水含量变化地下水含量丰富时,造成土体松软,盾构往往偏向松软土体或地下水丰富的河道的一边。
(七)施工连续性施工中途停止、施工流程不连贯以及推进速度不均匀,例如一旦遇到比较松软的土质,会造成盾构机下沉,因而影响盾构掘进姿态。
盾构测量知识点总结盾构是一种在地下挖掘隧道的机械设备,广泛应用于城市地铁、地下管线等工程中。
盾构测量是盾构施工中不可或缺的一个环节,它负责确定隧道的位置、方向和姿态,确保盾构在地下进行准确、安全的施工。
在盾构测量中涉及到很多基本概念、原理和技术,下面就盾构测量的知识点进行总结分析。
一、盾构测量基本概念1. 盾构测量的定义盾构测量是指利用测量技术手段对盾构进行控制和监测。
它是盾构施工中的重要环节,主要包括盾构的导向、水平、垂直和姿态控制。
盾构测量的目的是确保盾构在地下进行准确、安全的施工。
2. 盾构测量的作用盾构测量的作用主要包括以下几方面:(1)确定盾构的位置、方向和姿态。
(2)监测盾构的变形、位移和姿态变化。
(3)调整和控制盾构的导向、水平和垂直度。
(4)确保盾构在地下进行准确、安全的施工。
3. 盾构测量的方法盾构测量主要包括以下几种方法:(1)导向测量:用于确定盾构的位置和方向。
(2)水平测量:用于控制盾构的水平度。
(3)垂直测量:用于控制盾构的垂直度。
(4)姿态测量:用于控制盾构的姿态。
二、盾构测量原理1. 盾构测量的基本原理盾构测量的基本原理是利用测量仪器和设备对盾构进行控制和监测。
它主要包括以下几个方面的原理:(1)测量原理:利用测距仪、角度仪等测量仪器对盾构进行定位和测量。
(2)控制原理:利用控制系统对盾构的位置、方向和姿态进行调整和控制。
(3)监测原理:利用监测系统对盾构的变形、位移和姿态变化进行监测和分析。
2. 盾构测量的误差分析盾构测量中存在着不可避免的误差,主要包括以下几种误差:(1)仪器误差:由于测量仪器本身的精度和稳定性导致的误差。
(2)环境误差:由于地下环境、地质条件等因素导致的误差。
(3)操作误差:由于人为操作不当导致的误差。
(4)系统误差:由于盾构控制系统本身的误差导致的误差。
盾构测量的误差分析对于准确测量和控制盾构非常重要,需要采取相应措施来减小误差并提高测量精度。
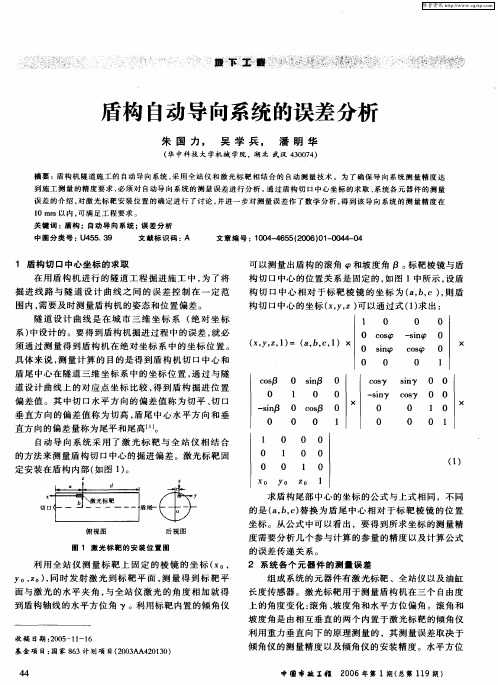
盾构位姿测量的误差分析1潘明华朱国力赵斌(华中科技大学数字制造装备与技术国家重点实验室武汉430074)摘要: 本文通过对盾构机位姿自动测量原理的研究,首先解决了激光标靶的安装位置标定问题,分析了标靶在盾构机内安装位置的标定误差与标靶的姿态角测量误差之间的关系;然后通过仿真得到了各姿态角对盾构机切口中心测量误差的影响,并根据影响程度不同对各姿态角的测量误差进行了分配;最后确定各姿态角所需的测量精度,以达到切口中心全局坐标的测量精度要求.关键词:自动测量系统盾构机姿态角测量误差Error Analysis of Automatic Measuring System of Shield MachinePan Minghua Zhu Guoli Zhao Bin(State Key Laboratory of Digital Manufacturing Equipment and Technology,Huazhong University of Science and Technology,Wuhan , 430074, China)Abstract: The measuring principle of shield automatic measuring system is briefly introduced in this paper. The way to obtain the location of the target in the shield is given and the relationship between position error and measuring error of attitude angles is shown. The coordinates error of cutter head center measurement was analyzed by simulating the effect of every attitude angle’s measuring error on it. Based on the analysis, the attitude angle s’ error limits are distributed to obtain the coordinates of cutter head center with eno ugh precision.Key words: automatic measuring system; shield machine; attitude angle; measuring error11引言使用盾构进行隧道掘进施工时,需要使盾构沿隧道设计曲线掘进. 隧道设计曲收稿日期:2009-1-15作者简介:潘明华(1977-),男,博士研究生,讲师;武汉,华中科技大学机械学院(430074)Email: pmh24@1基金项目:国家重大基础研究计划(973计划)项目(2007CB714000)国家高技术研究发展计划(863计划)项目(2007AA04180403)线以全局坐标系为基准. 掘进施工中需要实时测量盾构在全局坐标系中的位置和姿态,通过与隧道设计曲线比较,得到盾构掘进的位置偏差和姿态偏差. 实际施工中主要测量盾构切口中心和盾尾中心与设计曲线的水平偏差和垂直偏差[1],因此测量工作的主要任务是得到切口中心和盾尾中心在全局坐标系中的坐标.由于切口中心和盾尾中心的测量原理相同,本文中仅讨论切口中心的测量误差。
全站仪通过测量激光束到棱镜的距离、激光束的水平角以及垂直方位角来确定目标点的坐标位置,测量精度高,大量应用于隧道测量领域。
全站仪强大的自动化测量功能,特别是自动目标识别的能力,使得它可以用来跟踪测量移动的目标,因此应用于各种盾构位姿自动测量系统中:如棱镜法、激光标靶法等[]。
本文讨论的自动测量系统采用激光标靶与全站仪相结合的方法测量盾构切口中心和盾尾中心的全局坐标. 由于标靶加工和装配工艺水平、传感器元件本身精度的限制,各测量参数均存在误差,这些误差经传递后会使得盾构切口中心和盾尾中心的坐标位置产生误差. 因此,准确建立盾构切口中心点位误差与测量参数误差的传递关系,对改善自动测量系统的性能、提高系统的测量精度可以起到重要作用.本文对标靶的相对位置标定误差、盾构切口中心测量误差分别进行了分析,并利用计算机仿真对姿态角误差进行了合理分配,以使系统总体误差在允许范围内.2切口中心坐标的测量原理模型图1为标靶在盾构机内的安装位置图。
按照测量工程的习惯,将全局坐标系和其他相对坐标系均设置为左手坐标系。
自动测量系统工作时,全站仪固定安装在已拼装好的隧道管片上,标靶固定于盾构内部,标靶与全站仪间无障碍物遮挡. 利用全站仪测量标靶棱镜的全局坐标(x0,y0,z0),同时发射激光到标靶平面,测量标靶平面与激光的水平夹角,与全站仪激光的水平角合成得到标靶轴线在全局坐标系中的水平方位角γ .利用标靶内置倾角仪可以测量标靶相对于全局坐标系的滚角α和俯仰角β[2] . 以标靶棱镜中心为原点,以标靶测量的滚角α、俯仰角β、水平入射角γ的零值方向为坐标轴方向,建立相对坐标系o—a b c . 标靶固定在盾构上,坐标系o—a b c中盾构切口中心的坐标(x1,y1,z1)是固定的. 为求取盾构切口中心的全局坐标(x,y,z),通过(x1,y1,z1)从坐标系o —a b c 旋转平移到全局坐标系O-XYZ 中,则有[3][][][]111000xy z x y z M x y z =⨯+ (1) 其中 100cos 0sin cos sin 00cos sin 010sin cos 00sin cos sin 0cos 001M ββγγααγγααββ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=-⨯⨯-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦为相对坐标系o —a b c 到全局坐标系O-XYZ 的旋转变换矩阵.无铰接油缸的盾构尾部中心全局坐标的计算式与上式相同, 只需将(x 1,y 1,z 1)更换为盾尾中心在坐标系o —a b c 中的相对坐标即可.图1.激光标靶的安装位置图3切口中心与标靶相对位置坐标标定的误差分析将标靶安装到盾构上后,盾构静止的状态下,通过人工方法测量切口中心的全局坐标(x,y,z ),通过全站仪测量标靶棱镜的全局坐标(x 0,y 0,z 0),然后读取标靶的三姿态角读数,通过对式(1)进行矩阵变换,反算相对坐标(x 1,y 1,z 1),可得[][]1111000x y z x x y y z z M -=--- (2)其中1111cos sin 0cos 0sin 100sin cos 00100cos sin 001sin0cos 0sin cos M M M M γβαγγββγγααββαα------⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦利用标靶采集的方位角γ、滚角α及俯仰角β都存在测量误差. 设三个姿态角的误差值分别为Δγ、Δα、Δβ,可视为标靶绕原坐标系轴线旋转了Δ角. 即:11000cos sin 0sin cos M ααααα-∆⎡⎤⎢⎥=∆∆⎢⎥⎢⎥-∆∆⎣⎦1cos 0sin 010sin 0cos M βββββ-∆∆-∆⎡⎤⎢⎥=⎢⎥⎢⎥∆∆⎣⎦ 1cos sin 0sin cos 0001M γγγγγ-∆∆-∆⎡⎤⎢⎥=∆∆⎢⎥⎢⎥⎣⎦可知存在角度误差时的变换矩阵:11111111M M M M M M M γγββαα-------∆∆∆=由于角度误差Δ为毫弧度级别,可以视为极小量,故sin Δ≈Δ,cos Δ≈1,上述矩阵可近似表示为:11000101M ααα-∆⎡⎤⎢⎥=∆⎢⎥⎢⎥-∆⎣⎦ 11001001M βββ-∆-∆⎡⎤⎢⎥=⎢⎥⎢⎥∆⎣⎦ 11010001M γγγ-∆-∆⎡⎤⎢⎥=∆⎢⎥⎢⎥⎣⎦相对坐标(x 1,y 1,z 1)的标定误差为:[][][]111110001000x y z x x y y z z M x x y y z z M --∆∆∆=------- (3) 忽略Δα, Δβ和Δγ的高次分量后,表达式(3)可以化简为: 100010(cos sin sin cos )()(sin sin cos cos )()cos ()(sin sin cos cos cos sin cos cos cos sin sin sin sin )()(cos sin sin cos sin sin cos sin x x x y y z z y x x γββγγβγββγγβββγααγαγγβααγβαβγβαγγααγαγγβααγ∆=-∆-∆-+-∆+∆-+∆-∆=∆-∆+∆+∆-∆-+-∆-∆+∆+0010cos sin cos sin sin )()(sin sin cos cos )()(sin cos cos sin cos sin sin cos cos cos sin sin cos )()(cos cos sin sin sin sin sin sin cos cos cos s y y z z z x x βαβγβαγβαββααγααγαγγβαααγββγβαγγααγαγγβααγβαβγ∆+∆-+∆-∆-∆=-∆-∆+∆-∆+∆-+∆-∆+∆-∆-00in cos )()(cos sin sin cos )()y y z z βαγβααβαβ⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪∆-+-∆-∆-⎩ 相对坐标的标定是在盾构进入施工隧道前进行的. 此时盾构水平放置,轴线的滚角α和俯仰角β均接近于0 . 安装标靶时尽量使标靶轴线与盾构轴线平行,可调节标靶的俯仰角β和滚角α读数接近零值,使sin α与sin β取值为较小量. 由于方位角γ的实际取值与相对坐标无关,设γ=0。
Δα,Δβ与Δγ为极小量,表达式中如有分量同时包含Δα、Δβ、Δγ和sin α、sin β两类量,则为极小分量,可以忽略.用此方法处理相对坐标的误差表示式即可得100100100()()()()()()x y y z z y x x z z z x x y y γβγαβα∆=∆-+∆-⎧⎪∆=-∆--∆-⎨⎪∆=-∆-+∆-⎩ 其中,(x,y,z)和(x 0,y 0,z 0)为切口中心全局坐标和标靶棱镜全局坐标,由全站仪测量得到,误差为毫米级. 根据盾构的尺寸和标靶安装位置可知,x-x 0,y-y 0, z-z 0的值为米级. 上式中x-x 0,y-y 0,z-z 0毫米级的测量误差与极小量Δα,Δβ与Δγ的乘积可以忽略,故上述表达式中可以不考虑x-x 0,y-y 0,z-z 0的误差.此时标靶的γ=0,α≈0,β≈0,可知对盾构进行相对位置标定时x-x 0≈x 1、y-y 0≈y 1、z-z 0≈z 1,则相对坐标位置误差可以修正为111111111x y z y x z z x y γβγαβα∆=∆+∆⎧⎪∆=-∆-∆⎨⎪∆=-∆+∆⎩ (4) 从图1中可知,y 1和z 1近似为标靶到盾构轴线的水平和垂直距离,而x 1为切口到标靶所在的盾构横断面距离. 盾构外形为一个长圆筒,x 1要比y 1和z 1大很多. 从式(4)中可知,滚动角误差Δα对相对坐标误差的影响较小,俯仰角误差Δβ和方位角误差Δγ对相对坐标误差的影响较大. 标靶在盾构中的安装位置决定了相对坐标(x 1,y 1,z 1),标靶安装越远离切口和盾构轴线,相对坐标(x 1,y 1,z 1)越大,标定的误差就越大.4切口中心全局坐标测量误差分析盾构开始掘进工作后,通过全站仪发射激光测量标靶棱镜全局坐标,同时读取标靶输出的三个姿态角. 利用式(1)进行测量计算,得到盾构工作状态下的切口中心全局坐标(x,y,z) .切口中心全局坐标的测量误差可通过式(1)推导. 将式(1)中所有参数表示为T i (i=1,2,…),由误差传递原理推导切口中心全局坐标(x,y,z)的测量误差得[4]x y z ⎧∆=⎪⎪⎪⎪∆=⎨⎪⎪⎪∆=⎪⎩ (5) 由式(1)和式(5)可知,标靶相对位置参数(x 1,y 1,z 1)对盾构切口中心坐标x 的误差分量为111111111111cos cos ()(cos sin sin sin cos )()(cos sin cos sin sin )()x x y z x x y x z y x z x y z βγγβαγαβγγααβγαγβα⎧∂∆=∆+∆∂⎪⎪⎪∂∆=-∆+∆⎨∂⎪∂⎪∆=+∆-∆∂⎪⎩ (6) 三个姿态角对x 的误差分量为11111111((cos sin cos sin sin )(sin sin cos cos sin ))(sin cos sin cos cos cos cos cos )(cos sin (sin sin sin cos cos )(cos sin sin sin cos ))x y z x x y z x x y z ααβγαγαβγαγααββγαβγαβγββγβγαβγαγαβγαγγγ⎧∂∆=++-∆⎪∂⎪⎪∂∆=-+-∆⎨∂⎪⎪∂∆=--++-∆⎪∂⎩(7) 同理可得标靶相对位置参数对坐标y 和坐标z 的误差分量,以及姿态角对坐标y 和坐标z 的误差分量,这里不加详述.5仿真分析5.1 姿态角误差分配比例分析以三菱 MHI 盾构为例,该型盾构外径6.34米,长约10米. 标靶安装位置参数可设置为x 1=5m ,y 1=0.5m ,z 1=2m . 根据实际工作情况及设计要求,盾构姿态角的变化范围为α∈(-30°,30°),β ∈(-15°,15°), γ∈(0°,360°) .为分析各姿态角对切口中心误差的影响程度,分别对各姿态角误差造成的切口中心全局坐标进行仿真分析. 考虑滚动角误差Δα,取Δα=1mrad ,在γ∈(0°,360°)范围内对切口中心全局坐标的测量误差进行仿真并取最大值,得到图2 .图2 Δα=1mrad时的测量误差考虑俯仰角误差Δβ,取Δβ=1mrad,在γ∈(0°,360°)范围内对切口中心全局坐标的测量误差进行仿真并取最大值,得到图3 .图3 Δβ=1mrad时的测量误差考虑方位角误差Δγ,取Δγ=1mrad,在γ∈(0°,360°)范围内对切口中心全局坐标的测量误差进行仿真并取最大值,得到图4 .图4 Δγ=1mrad时的测量误差图2、3、4中1、2、3曲面分别为x,y,z坐标在盾构姿态角变化范围内的最大测量误差.由仿真结果可知,Δα对水平坐标误差影响较大,对垂直坐标误差影响较小;Δβ误差对水平坐标误差影响较小,对垂直坐标误差影响较大;Δγ对水平坐标影响较大,对垂直坐标影响较小. 综合3个图可知,Δα对测量结果影响最小,Δβ和Δγ分别对垂直坐标误差和水平坐标误差有较大影响,影响程度大致相等.水平坐标误差和垂直坐标误差都是自动测量系统的性能指标,应该均衡分配姿态角参数的误差裕度以使水平误差和垂直误差比较接近. 从这一点考虑,Δα的值可以设置为Δβ和Δγ的2倍,Δβ与Δγ的值相等.5.2 标靶姿态角极限误差分析根据盾构施工的技术要求,隧道贯通精度应能控制在30mm[5]. 为达到贯通精度,盾构切口中心水平位置和垂直位置测量误差应控制在10mm以内. 垂直位置误差为Δz;水平位置误差为坐标测量误差(Δx,Δy)的合成:δ=≤10mm按上述分析,设置Δβ=Δγ,Δα=2Δβ,在γ∈(0°,360°)范围内对切口中心全局坐标的测量误差进行仿真并限定最大值小于或等于10mm,得到图5 . 其中1曲面为水平位置误差、2曲面为垂直位置误差.图5 切口中心综合误差仿真由仿真结果可知,Δβ=Δγ=1mrad,Δα=2mrad时,水平位置误差δ最大值为10mm,垂直位置误差Δz最大值为6.7mm,可以满足隧道贯通精度的要求.6结论本文通过对盾构自动测量系统中标靶位置标定误差和盾构切口中心测量误差的研究,得到如下结论.(1)影响标靶相对位置坐标标定误差的因素为标靶三个姿态角的测量误差,其中滚角误差对标靶位置标定的影响小于方位角和俯仰角误差.(2)姿态角误差的最佳分配比例:滚角误差为方位角和水平角误差的2倍.按此误差分配原则进行仿真,可知当滚角误差为2mrad,俯仰角误差为1mrad,方位角误差为1mrad时,切口中心全局坐标测量误差在10mm以内,可以满足盾构贯通精度要求.参考文献1 冯冬健, 等.地铁盾构施工中盾构机姿态定位测量的研究[J].工程勘察,2003( 5) .2 张厚美,古力. 盾构机姿态参数的测量及计算方法研究[J].现代隧道技术, 2004( 2) : 14- 203 唐争气,等. 盾构机实时姿态测量和计算方法的研究[J].土木工程学报,2007(11)4 朱国力,等. 盾构自动导向系统的误差分析[J].中国市政工程,2006(1)5 孙家驷. 道路设计资料集(第1 册) [M] . 北京:人民交通出版社,2001.6 潘明华, 朱国力. 盾构机自动导向系统的测量方法研究[ J]施工技术, 2005,( 6) : 34- 36。