一种吊球式机械矩阵的设计与实现
- 格式:pdf
- 大小:2.41 MB
- 文档页数:3
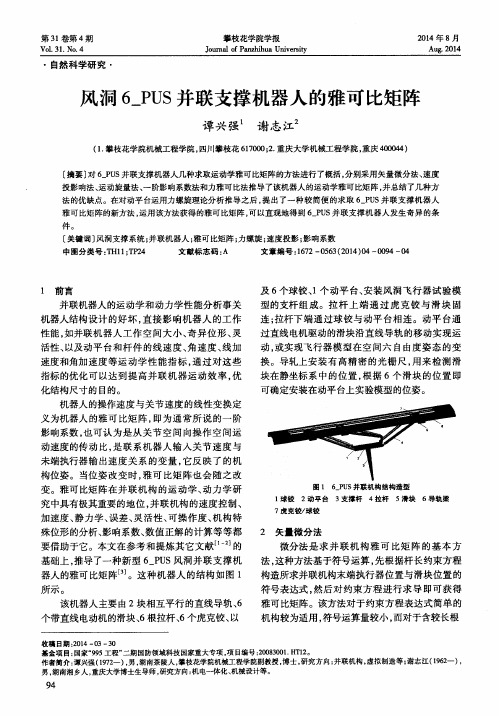
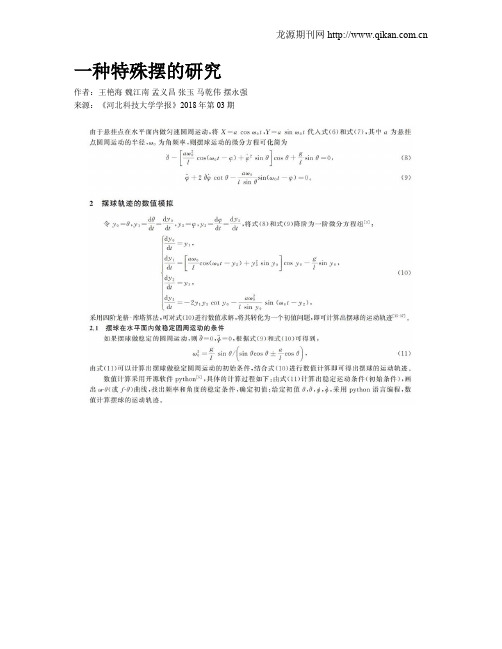
一种特殊摆的研究作者:王艳海魏江南孟义昌张玉马乾伟摆永强来源:《河北科技大学学报》2018年第03期摘要:为了解决交通运输和工业行业中移动重物的起重机动臂和支撑点不稳定的摆动幅度问题,采用一个悬挂点在水平面内做圆周运动的摆球系统模型来模拟这一问题的动力学过程。
应用拉格朗日方程推导了摆球运动的微分方程,采用四阶龙格-库塔算法进行了数值求解,得到了给定悬挂点圆周运动半径、频率和摆长的条件下,摆球做稳定圆周运动的摆角,计算了摆球的稳定运动轨迹,并将计算结果与实验进行了对比,理论计算和实验结果精确吻合。
研究内容在科研和工程技术领域有着广泛的应用,研究结果对起重机的机械吊臂设计有重要的参考价值。
同时,文中所用到的理论建模、计算机编程、数值计算、实验设计等也可以作为一个非常好的教学案例,培养学生应用所学理论解决实际问题的能力。
关键词:理论力学;圆周运动;拉格朗日方程;四阶龙格-库塔算法中图分类号:O311.3 文献标志码:A文章编号:1008-1542(2018)03-0238-05在一个力学摆的系统中,如果摆球的悬挂点在水平面内做圆周运动,在某些给定的初始条件下,摆球将会做半径更小的稳定的圆周运动,这一研究题目来自第二十九届国际青年物理学家锦标赛IYPT第二题:滞后的摆。
对该问题的研究,无论在科研、工程技术领域和教学中都有着广泛的应用,有助于对起重机吊臂的设计[1-3],也可以作为理论力学教学的补充,增强学生对理论力学相关理论知识的理解,提高学生将物理理论应用到实际问题中去的能力[4-6]。
1 理论模型一根长为R的硬质杆,杆的一端固定在o点,另一端s绕o点作水平圆周运动,并在硬质杆的s端连接一根长度为l的细绳,细绳的下端悬挂一个金属摆球,绳子的伸缩和质量不计。
s 端开始运动后,小球开始摆动,如图1所示(摆球的三维坐标系,xoy平面为水平面)。
给定不同的初始条件,小球会呈现出不同的运动轨迹,研究摆球做半径小于R的稳定的圆周运动的条件。

(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201920343739.0(22)申请日 2019.03.19(73)专利权人 中山市合众乐创动漫设计工作室地址 528400 广东省中山市东区逸东路逸东苑2幢7卡商铺(72)发明人 司徒伟杰 (74)专利代理机构 深圳市中联专利代理有限公司 44274代理人 李俊(51)Int.Cl.A63F 9/30(2006.01)A63F 7/00(2006.01)A63F 7/22(2006.01)A63F 7/36(2006.01)(54)实用新型名称一种吊球机构(57)摘要本实用新型涉及一种吊球机构,其包括底座、吊臂组件和转轴组件,吊臂组件包括吊臂架、拖链和抓取装置,吊臂架上设置有定滑轮、动滑轮、驱动装置和导槽,导槽上设置有导架,在驱动装置的作用下导架能沿着导槽的长度方向来回滑行,定滑轮可转动地安装固定在吊臂架与所述第一端相对的第二端上,动滑轮可转动地安装固定在导架上,拖链的第一端固定连接在吊臂架上,拖链的第二端先后绕过动滑轮和定滑轮后与所述抓取装置连接。
本实用新型的优点在于:1、抓取装置上升和下降速度快,效率高;使用拖链连接抓取装置,吊臂组件左右移动时,抓取装置晃动小,因而转动平稳。
权利要求书1页 说明书2页 附图2页CN 209809487 U 2019.12.20C N 209809487U权 利 要 求 书1/1页CN 209809487 U1.一种吊球机构,包括底座和吊臂组件,底座和吊臂组件之间设置有用以使吊臂组件转动的转轴组件,其特征在于,吊臂组件包括吊臂架、拖链和抓取装置,吊臂架的第一端与转轴组件连接,吊臂架上设置有定滑轮、动滑轮、驱动装置和沿着吊臂架长度方向延伸的导槽,导槽上设置有与驱动装置连接的导架,在驱动装置的作用下导架能沿着导槽的长度方向来回滑行,定滑轮可转动地安装固定在吊臂架与所述第一端相对的第二端上,动滑轮可转动地安装固定在导架上,拖链的第一端固定连接在吊臂架上,拖链的第二端先后绕过动滑轮和定滑轮后与所述抓取装置连接。
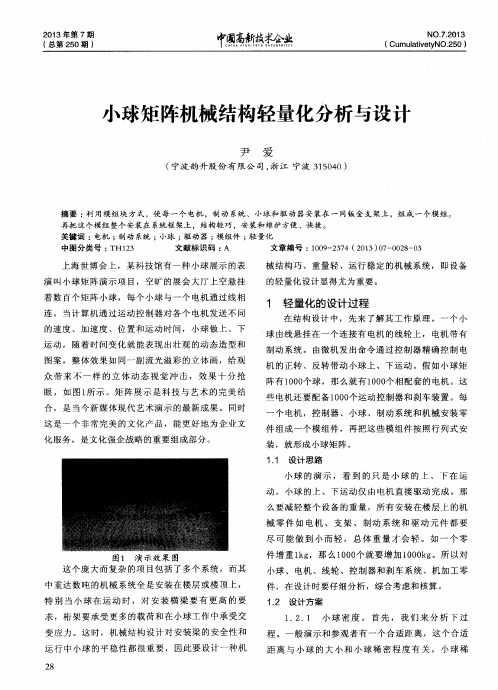
概述小球矩阵机械结构轻量化设计上海世博会上,某科技馆有一种小球展示的表演叫小球矩阵演示项目,空旷的展会大厅上空悬挂着数百个矩阵小球,每个小球与一个电机通过线相连。
当计算机通过运动控制器对各个电机发送不同的速度、加速度、位置和运动时间,小球做上、下运动,随着时间变化就能表现出壮观的动态造型和图案,整体效果如同一副流光溢彩的立体画,给观众带来不一样的立体动态视觉冲击,效果十分抢眼,如图1所示。
矩阵展示是科技与艺术的完美结合,是当今新媒体现代艺术演示的最新成果。
同时这是一个非常完美的文化产品,能更好地为企业文化服务,是文化强企战略的重要组成部分。
这个庞大而复杂的项目包括了多个系统,而其中重达数吨的机械系统全是安装在楼层或楼顶上,特别当小球在运动时,对安装横梁要有更高的要求,桁架要承受更多的载荷和在小球工作中承受交变应力。
这时,机械结构设计对安装梁的安全性和运行中小球的平稳性都很重要,因此要设计一种机械结构巧、重量轻、运行稳定的机械系统,即设备的轻量化设计显得尤为重要。
1 轻量化的设计过程在结构设计中,先来了解其工作原理。
一个小球由线悬挂在一个连接有电机的线轮上,电机带有制动系统。
由微机发出命令通过控制器精确控制电机的正转、反转带动小球上、下运动。
假如小球矩阵有1000个球,那么就有1000个相配套的电机。
这些电机还要配备1000个运动控制器和刹车装置。
每一个电机,控制器、小球、制动系统和机械安装零件组成一个模组件,再把这些模组件按照行列式安装,就形成小球矩阵。
1.1 设计思路小球的演示,看到的只是小球的上、下在运动。
小球的上、下运动仅由电机直接驱动完成。
那么要减轻整个设备的重量,所有安装在楼层上的机械零件如电机、支架、制动系统和驱动元件都要尽可能做到小而轻,总体重量才会轻。
如一个零件增重1kg,那么1000个就要增加1000kg。
所以对小球、电机、线轮、控制器和刹车系统、机加工零件,在设计时要仔细分析,综合考虑和核算。
专利名称:一种机械原理实验教具专利类型:实用新型专利
发明人:钟龙飞,王亚秋
申请号:CN201620527046.3申请日:20160602
公开号:CN205920687U
公开日:
20170201
专利内容由知识产权出版社提供
摘要:一种机械原理实验教具,包括下箱体、中间旋转装置、上箱体、展示板、演示教具和差速器,所述下箱体的底部设有滚轮,所述中间旋转装置设在下箱体的顶部,所述中间旋转装置可绕其竖直轴线转动,所述上箱体设在中间旋转装置上,所述上箱体呈方形结构,所述上箱体的各个外表面均可用于设置演示教具,所述差速器设在上箱体内,所述差速器上设有传动轴,所述传动轴伸出上箱体与演示教具连接,所述传动轴为演示教具提供动力。
本实用新型通过在上箱体内设置差速器,差速器上的传动轴伸出上箱体与演示教具连接,提供动力,实现机械机构运动的直观演示出来,使学生能直观的了解机构的运动规律,能快速理解机构中各构件的运动关系,加深对机械的理解。
申请人:厦门理工学院
地址:361024 福建省厦门市集美区理工路600号
国籍:CN
代理机构:泉州市潭思专利代理事务所(普通合伙)
代理人:麻艳
更多信息请下载全文后查看。
专利名称:一种摆式球形机器人及其控制系统专利类型:实用新型专利
发明人:万恒,霍建文,张华,郭明明,杨茂桃,陶天平申请号:CN201922006875.3
申请日:20191119
公开号:CN211167161U
公开日:
20200804
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种摆式球形机器人及其控制系统,该球形机器人包括球形壳体、及设置在所述球形壳体内的转动单元和摆动单元,转动单元包括第一法兰盘联轴器、第二法兰盘联轴器、箱型转轴、第一步进电机和第二步进电机,摆动单元包括第一直行电机、第二直行电机和摆锤。
本实用新型的球形机器人极大减少了运动构件,使其运动方式更加灵活轻便,提高了球形机器人运行的可靠性。
申请人:西南科技大学
地址:621010 四川省绵阳市涪城区青龙大道中段59号
国籍:CN
代理机构:成都正华专利代理事务所(普通合伙)
代理人:陈选中
更多信息请下载全文后查看。
一种吊球式机械矩阵的设计与实现
李晓猛;张华书;李谦;杨勇;王石
【期刊名称】《机械工程师》
【年(卷),期】2015(000)009
【摘要】对一种吊球式机械矩阵的机电系统进行设计和研究,并对系统实现的关键技术包括吊球运动平稳性、机械传动的结构设计,以及控制系统的设计进行了详细的介绍和分析,最后阐明了这种机械矩阵的潜在价值和应用领域.
【总页数】3页(P125-127)
【作者】李晓猛;张华书;李谦;杨勇;王石
【作者单位】华中科技大学机械科学与工程学院,武汉430074;华中科技大学机械科学与工程学院,武汉430074;东莞华中科技大学制造工程研究院,广东东莞523808;华中科技大学机械科学与工程学院,武汉430074;华中科技大学机械科学与工程学院,武汉430074;东莞华中科技大学制造工程研究院,广东东莞523808【正文语种】中文
【中图分类】TM391.8
【相关文献】
1.一种新型吊球自动入轨装置 [J], 李建功;郝力文;段润保;王子文;李世东
2.实扣式吊球牵扯拉器易制好用 [J], 梁瑞林
3.便携式吊运机械行业的排头兵——记刘春雨和他的便携式吊运机 [J], 刘春山
4.浮卷式塑苫装备吊球自动入轨浅析 [J], 吴敏; 李振亮
5.一种新型空间位置全平衡机械吊及其综合性能分析 [J], 宋宁策;谢志江;刘飞;李亮亮
因版权原因,仅展示原文概要,查看原文内容请购买。