- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ppt课件
31
在这类极值问题中,要处理两种类型的等式约 束。一是微分方程约束,一是终端边界约束。根据 拉格朗日乘子法,要引入两面两个乘子矢量,一个 是n维λ(t),另一个是q维μ,将等式约束条件泛函 极值化成无约束条件泛函极值问题来求解。
ppt课件
32
为此,构造增广泛函
J Φxt f ,t f T Nxt f ,t f
ppt课件
20
5个未知数x1, x2, λ1, λ2, u,由5个方程联立求得通解
1 C1
2 C1t C2
u C1t C2
C
2t
2
C3t
C4
x2
1 2
C1t
2
C2t C3
ppt课件
21
4个积分常数C1, C2, C3, C4由4个边界条件
x10 1, x2 0 1, x12 0, x2 2 0
t f
t0
Lxt,ut,t T
t f
xt , ut , t
xt d t
(5-21)
写出哈密顿函数
Hxt,ut,t,t Lxt,ut,t T t f xt,ut,t
ppt课件
(5-22)
33
于是
J Φxt f ,t f T Nxt f ,t f
t f
t0
H
xt
,
ut
,
t
,
t
T
t
xt
d
ppt课件
12
若始端和终端都固定时,δx(t0)=0,δx(tf)=0则以
xt0 x0
(5-15)
x t f x f
(5-16)
作为两个边界条件。
ppt课件
13
实际上,上述泛函极值的必要条件,亦可
由式(5-6)写出欧拉方程直接导出。
即 H d H
x H
H
u
dt
d dt
d dt
H t f
寻求最优控制u(t),将系统从初始状态x(t0)=x0 转移到终端状态x(tf),并使性能泛函J取极值。
ppt课件
4
将状态方程式(5-1)写成约束方程形式
f xt,ut,t xt 0
(5-3)
应用拉格朗日乘子法,构造增广泛函
J
t f
t0
Lxt
,
ut
,
t
T
t
f
xt
,
ut
,
t
xt
d
t
式中λ(t)——待定的n维拉格朗日乘子矢量。
2
一、拉格朗日问题
考虑系统
xt f xt,ut,t
(5-1)
式中 xt Rn;ut Rr ;
f xt,ut,t ——n维连续可微的矢量函数。
ppt课件
3
设给定 t t0 ,t f ,初始状态为x(t0)=x0,
终端状态x(tf)自由。性能泛函为
J
t f
t0
Lxt,ut,td t
(5-2)
x t0
x
H
H u
0
0
0
0
HxH
H
u
tf t0
0
x 0 0
(5-17)
ppt课件
14
应用上述条件求解最优控制的步骤如下:
1) 由控制方程
H 0 u
解出 u* u~x,
2) 将u*代入正则方程解两边边值问题,求x*、λ*。
3) 再将x*、λ*代入得 u* u~ x*, * 为所求。
ppt课件
(5-7)
6
对式(5-5)右边第二项作分部积分,得
t f T xd t t f T x d t T x t f
t0
t0
t0
将上式代入式(5-5),得
J t f Hx,u, ,t T x d t T x t f (5-8)
t0
t0
ppt课件
7
设u(t)和x(t)相对于最优控制u*(t)及最优轨线
17
由式(5-7),得
H
L T f
x
1 u2 2
T
0 0
1 0
x
10u
x
ppt课件
18
由欧拉方程,得
H x
d dt
H x
0 1
01 02
12
0
2101
ppt课件
19
H d H u 0
u d t u
112
0
u 2
H
d dt
H
0 0
1 0
x
0 1u
x
0
x1 x2 x2 u
t t0 ,t f
(5-35)
这就是说,对定常系统,沿最优轨线H恒为常值。
ppt课件
46
例4:给定系统状态方程为
x
0 0
1 0
x
10u
设初始状态x(0)= 0,终端状态约束曲线
x1(1)+x2(1)-1=0求使性能泛函
J 1 1u 2 td t
20
取极小时的最优控制u*(t)及最优轨线x*(t)。
9
式(5-9)称为动态系统的伴随方程或协态方程, λ又称为伴随矢量或协态矢量。
式(5-10)即系统的状态方程。
式(5-9)与式(5-10)联立称为哈密尔顿正则方程。
式(5-11)称为控制方程,
ppt课件
10
这个方程是在假设δu为任意,控制u(t)取值
不受约束条件下得到的。如果u(t)为容许控制,
u*(t)的变分为δu和δx,计算由δu和δx引起的
J´的变分为:
J
tf t0
xT
H x
uT
H u
d
t
xT
tf t0
使J´取极小的必要条件是,对任意的δu和δx,
都有δJ´=0成立。
ppt课件
8
因此得
H 0
x H x
H 0 u
tf 0 t0 ppt课件
(5-9) (5-10) (5-11) (5-12)
t
(5-23)
ppt课件
34
对上式中最后一次作分部积分,得
J Φ x t f
,t f
T N x tf
,t f
T txt t f t0
t f
t0
H
xt
,
ut
,
t
,
t
T
t
xt
d
t
(5-24)
ppt课件
35
这是一个可变端点变分问题。考虑x(t),u(t),
tf相对于它们最优值x*(t),u*(t),t*f的变分,并计 算由此引起J´的一次变分δJ´。设
2
-1
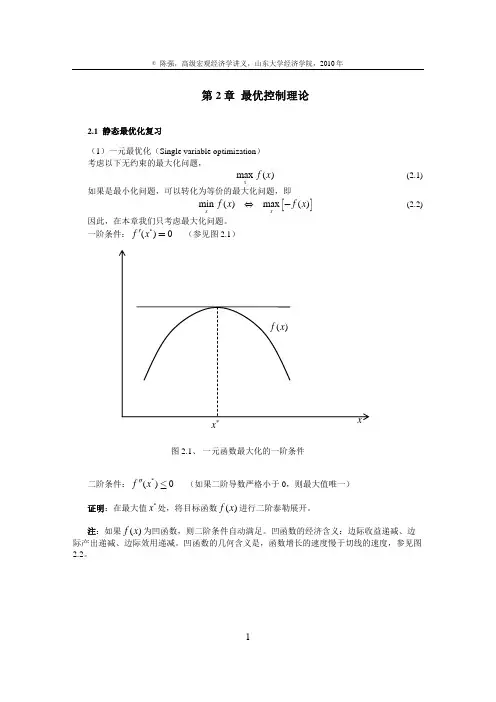
-2
x2*(t)
u*(t)
-3
ppt课件
24
例2:设问题同例1。但将终端状态改为θ(2)=0, ω(2)自由,即终端条件改成部分约束、部分自 由。重求u*(t)、x*(t)。
ppt课件
25
解 正则方程及控制方程与例1完全相同,只是
边界条件改成 t 0时 x10 1, x2 0 1,t 2 时 x12 0,2 2 0 ,代入例1的通解中可确定积分
变分各有两项:
xT t f
Φ x t f , t f x t f
Φ x t f , t f t f
t f
xT t f
N T x t f , t f x t f
N T
x tf
,t f
t f
t f
ppt课件
39
因此,有
J
t
f
H
dH dt
H t
H u
T
u
H x
T
f
(5-33)
ppt课件
44
如果u为最优控制,必满足
H 0 u
及
H 0
x
因此,有 d H H d t t
(5-34)
上式表明,哈密顿函数H沿最优轨线对时间的
全导数等于它对时间的偏导数。
ppt课件
45
当H不显含t时,恒有
dH 0 dt
即
H t 常数
ppt课件
5
定义纯量函数
Hx,u,,t Lx,u,t T f x,u,t (5-4)
称H[x,u,λ,t]为哈密尔顿函数。则
J tf Hx,u,,t T xd t t0
(5-5)
或 J tf H x, x,u, ,td t t0
(5-6)
式中
Hx, x,u,,t Lxt,ut,t T tf xt,ut,t xt
解得
C1
3, C2
7 2 ,C3
1,C4
1
ppt课件
22
因此,最优解为
u* t 3t 7
2
x1* t
1 2
t3
7 4
t
2
t
1
x
* 2
t
3 2
t2
7 2
t
1
ppt课件
23
最优控制u*(t)及最优轨线x*(t)如图2所示。
x(t) u(t) 2 1
x1*(t)
(2,2,5)
0
t
0.5
1 7/6 1.5
受到 utU 的约束,δu变分不能任意取值,
那么,关系式 H 0不成立,这种情况留待极 u
小值原理中讨论。
ppt课件
11
式(5-12)称为横截条件。常用于补充边界条件。
例如,若始端固定,终态自由时,由于δx(t0)=0, δx(tf)任意,则有
xt0 x0