闭环系统辨识 报告
- 格式:doc
- 大小:169.00 KB
- 文档页数:12

基于闭环辨识的鲁棒内模PID优化整定及应用的开题报告1. 研究的背景和意义PID控制是一种常见的自动控制方法,具有简单易用、可靠性高等优点,在各领域得到广泛应用。
然而,PID控制器的调整需要根据具体应用场景的特点来进行,这使得传统的PID控制往往难以满足复杂系统的高性能控制要求。
因此,如何对PID控制器进行精准调整,以实现系统动态响应性能和鲁棒性能的平衡,一直是控制领域的研究热点之一。
近年来,基于闭环辨识的鲁棒内模PID控制方法成为其中的一个重要研究方向。
该方法通过在控制器内部嵌入一个模型来加强控制器的鲁棒性能,同时利用闭环辨识技术对系统参数进行估计和补偿,使得控制器在动态性能和鲁棒性能上达到一个较好的平衡。
因此,对该方法进行深入研究,实现其在实际控制系统中的应用具有重要的理论意义和工程应用价值。
2. 研究的内容和思路本文将从以下几个方面开展研究:(1)闭环辨识技术的研究:对现有的闭环辨识方法进行综合分析和比较,确定适合本文研究的闭环辨识方法,并进行仿真验证。
(2)内模控制器的设计:在闭环辨识的基础上,设计内模控制器的结构和参数,并进行仿真和实验验证。
(3)鲁棒性能的分析和优化:分析内模控制器的鲁棒性能,并提出相应的优化方法,在平衡动态性能和鲁棒性能的基础上实现内模PID控制器的优化整定。
(4)应用于实际系统的验证:将所设计的内模PID控制器应用于实际系统中,对其控制性能进行实验验证,并与常用的PID控制器进行比较。
3. 研究的预期成果本文将实现基于闭环辨识的鲁棒内模PID控制器在实际控制系统中的应用,达到以下预期成果:(1)提出一种具有较好鲁棒性能和动态响应性能平衡的内模PID控制器设计方法,为实际控制系统的设计提供参考和借鉴。
(2)分析和验证内模PID控制器的鲁棒性能,并推导相应的鲁棒性能分析公式和优化方法,为内模PID控制器的进一步研究提供理论基础。
(3)通过对实际系统的控制实验验证,证明所设计的内模PID控制器在控制性能上具有优异的表现,为其在实际应用中推广应用提供参考。
第1篇实验目的1. 理解电流内环闭环控制的基本原理。
2. 掌握电流内环闭环系统的设计方法。
3. 验证电流内环闭环系统的稳定性和动态性能。
4. 分析电流内环闭环系统在实际应用中的重要性。
实验器材1. 电流内环闭环实验平台2. 电流传感器3. 数据采集卡4. 电脑及相应软件5. 电源及负载实验原理电流内环闭环控制是一种常见的电力电子控制系统,通过实时监测电流反馈信号,调节功率开关管的占空比,使实际电流跟踪给定电流,从而实现对电流的精确控制。
电流内环闭环系统通常采用PI(比例-积分)控制器,其控制结构简单,易于实现。
实验步骤1. 连接实验平台,确保电流传感器、数据采集卡、电脑等设备正常工作。
2. 设置实验参数,包括给定电流、PI控制器参数等。
3. 启动实验平台,观察电流传感器采集到的电流信号。
4. 分析电流信号,验证电流内环闭环系统的稳定性和动态性能。
5. 逐步调整实验参数,观察系统响应,分析电流内环闭环系统在实际应用中的重要性。
实验结果与分析1. 电流跟踪性能实验结果显示,在给定电流变化时,电流内环闭环系统能够快速跟踪给定电流,误差较小。
这表明电流内环闭环系统具有良好的电流跟踪性能。
2. 稳定性分析通过观察电流信号,可以发现电流内环闭环系统在给定电流突变时,能够迅速恢复稳定,说明系统具有较好的稳定性。
3. 动态性能分析通过对电流信号的分析,可以得出以下结论:(1)系统响应速度较快,动态性能良好。
(2)系统超调量较小,说明PI控制器参数设置合理。
(3)系统振荡次数较少,说明系统具有良好的动态性能。
4. 实际应用中的重要性电流内环闭环系统在实际应用中具有重要意义,如:(1)提高电力电子设备的功率转换效率。
(2)降低系统谐波含量,提高电能质量。
(3)增强系统抗干扰能力,提高系统可靠性。
结论通过本次实验,我们了解了电流内环闭环控制的基本原理,掌握了电流内环闭环系统的设计方法,并验证了系统的稳定性和动态性能。
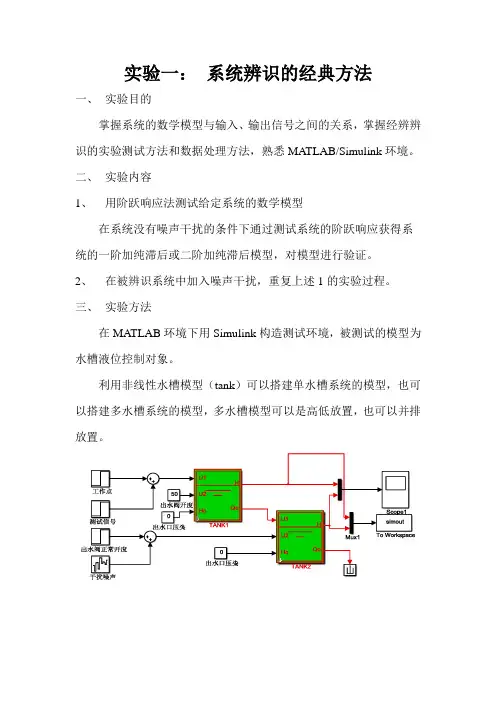
实验一:系统辨识的经典方法一、实验目的掌握系统的数学模型与输入、输出信号之间的关系,掌握经辨辨识的实验测试方法和数据处理方法,熟悉MATLAB/Simulink环境。
二、实验内容1、用阶跃响应法测试给定系统的数学模型在系统没有噪声干扰的条件下通过测试系统的阶跃响应获得系统的一阶加纯滞后或二阶加纯滞后模型,对模型进行验证。
2、在被辨识系统中加入噪声干扰,重复上述1的实验过程。
三、实验方法在MATLAB环境下用Simulink构造测试环境,被测试的模型为水槽液位控制对象。
利用非线性水槽模型(tank)可以搭建单水槽系统的模型,也可以搭建多水槽系统的模型,多水槽模型可以是高低放置,也可以并排放置。
1.噪声强度0.5,在t = 20的时候加入阶跃测试信号相应曲线2.乘同余法产生白噪声A=19;N=200;x0=37;f=2;M=512; %初始化;for k=1: N %乘同余法递推100次;x2=A*x0; %分别用x2和x0表示xi+1和xi-1;x1=mod(x2,M); %取x2存储器的数除以M的余数放x1(xi)中;v1=x1/M; %将x1存储器中的数除以256得到小于1的随v(:,k)=(v1-0.5 )*f;x0=x1; % xi-1= xi;v0=v1;end %递推100次结束;v2=v;k1=k;h=k1;%以下是绘图程序;k=1:1:k1;plot(k,v,'r');grid onset(gca,'GridLineStyle','*');grid(gca,'minor')3.白噪声序列图像020406080100120140160180200-1-0.8-0.6-0.4-0.20.20.40.60.81四、 思考题(1) 阶跃响应法测试系统数学模型的局限性。
答:只适用于某些特殊对象或者低阶简单系统;参数估计的精度有限,估计方法缺乏一般性。
北京工商大学《系统辨识》课程实验报告课程名称:系统辨识题目:闭环系统可辨识性实验研究专业班级:2015年1 月通过实验掌握闭环控制系统可辨识性条件及应用。
一、实验原理闭环辨识方法及可辨识性条件,闭环辨识要求在不打开控制环的情况下进行,在这之前必须对系统是否可辨识做出明确答复。
闭环系统的可辨识性条件主要结合间接辨识法和直接辨识法这两种主要的闭环辨识法进行讨论。
1.间接辨识法间接辨识法必须先获得闭环系统模型,在此基础上利用反馈通道上的控制器模型,从中导出前向通道模型。
2.直接辨识法直接辨识法则利用前向通道的输入输出数据,直接建立前向通道的数学模型,反馈通道的控制器模型可以是未知的。
这两种闭环辨识方法的区别在于间接法要求反馈通道的控制器模型已知,而直接法要求前向通道的输入输出变量是可测的。
从辨识的观点来看,只要在反馈通道上加上一个均值为零,与输出测量噪声无关的持续激励摄动信号,这两种闭环辨识法可以是等效的。
闭环系统是否可以辨识,依赖的因素很多,包括模型类的选择、辨识实验条件、辨识准则、辨识方法及其数据集的性质等。
从工程上说,下面一些结论可以使用:1.当反馈通道是线性的、非时变的,且不存在扰动信号,给定值又是恒定的时候,闭环系统的可辨识性条件是,反馈通道的模型结构不要导致闭环传递函数出现零极点相消,且反馈通道的模型阶次不要低于前项通道的模型阶次。
此外,如果反馈通道或前项通道存在迟滞环节,这对可辨识性条件是有利的。
2.如果反馈通道上有足够阶次的持续激励信号,并与前项通道上的噪声是不相关的,则闭环系统是结构性可辨识的。
3.反馈通道上的控制器是时变的或具有非线性,闭环系统也是结构性可辨识的。
4.反馈通道上的控制器能在几种不同的调节规律之间切换,闭环系统也是结构性可辨识的。
二、实验内容模拟如下闭环系统前向通道方程为:z(k)+1.4z(k-1)+0.45z(k-2)=u(k-1)+0.7u(k-2)+v(k) 其中v(k)是服从正态分布N(0,1)的白噪声。


闭环缺陷隐患整改情况汇报
近期,我们对公司的闭环缺陷隐患进行了全面的整改工作,现将整改情况进行
汇报。
首先,我们对闭环缺陷隐患进行了全面的排查和分析,确定了存在的问题和隐患。
针对不同的问题,我们制定了相应的整改方案,并明确责任人和整改期限。
在整改过程中,我们注重与相关部门的沟通和协调,确保整改工作的顺利进行。
其次,针对发现的闭环缺陷隐患,我们采取了有效的整改措施。
对于工艺流程
中存在的问题,我们进行了全面的优化和改进;对于设备设施方面的隐患,我们进行了及时的维护和更新;对于人员操作中可能存在的问题,我们进行了培训和指导。
通过这些措施的实施,我们有效地消除了闭环缺陷隐患,提升了生产安全和产品质量。
在整改过程中,我们也发现了一些问题和不足。
例如,部分员工对闭环缺陷隐
患的认识不够深刻,存在一定的安全意识和责任意识不强的情况;部分设备设施的维护保养工作不到位,存在一定的安全隐患。
针对这些问题,我们将继续加强员工培训和安全教育工作,加强设备设施的维护管理,确保闭环缺陷隐患的整改工作能够持续稳定地进行下去。
最后,我们将建立健全闭环缺陷隐患的长效管理机制,定期进行隐患排查和整
改工作,确保公司生产经营的安全稳定。
同时,我们也将加强对闭环缺陷隐患整改情况的跟踪和监督,及时发现和解决问题,不断提升公司的整体安全生产水平。
通过这次闭环缺陷隐患的整改工作,我们不仅解决了当前存在的安全隐患问题,还提升了公司的整体管理水平和员工的安全意识。
我们相信,在全体员工的共同努力下,公司的安全生产工作一定会取得更大的成就。
感谢大家的支持和配合!。
基于斜坡响应的实用闭环系统辨识方法及其应用斜坡响应方法是一种常用的闭环系统辨识方法,主要用于确定系统的传递函数。
该方法通过给系统输入一个斜坡信号,然后观察系统的输出响应,从而得到系统的传递函数。
在斜坡响应方法中,输入信号是一个斜坡函数,可以表示为r(t)=at,其中a为斜率。
通过对系统施加这样的输入信号,系统的输出响应可以表示为c(t)=ksat,其中ks为系统的静态增益。
通过测量系统的输入和输出响应,可以根据系统的传递函数来确定系统的参数。
斜坡响应方法的基本原理是,当输入信号是一个斜坡函数时,系统的输出响应应该是一个线性的函数关系。
根据线性系统的特性,可以通过斜坡响应的输入输出数据来估计系统的传递函数。
使用斜坡响应方法进行系统辨识时,首先需要选择适当的斜率a,并将斜坡信号作为输入信号施加到系统上。
然后,测量系统的输入和输出响应,并记录下这些数据。
接下来,通过斜坡响应的输入输出数据,可以利用最小二乘法或其他相关方法来估计系统的传递函数。
一般情况下,可以假设系统的传递函数为一阶或二阶系统,并对参数进行估计。
通过对估计的传递函数进行验证,可以确定系统的模型拟合程度以及参数的准确性。
斜坡响应方法的应用非常广泛。
首先,它可以用于工业控制系统的建模和辨识。
通过斜坡响应方法可以确定控制系统的传递函数,从而帮助工程师设计出更好的控制策略,并提高系统的稳定性和性能。
此外,斜坡响应方法还可以用于系统故障诊断和故障检测。
通过分析系统的斜坡响应,可以判断系统是否存在故障或异常情况,并进一步定位和诊断故障原因。
这对于工业自动化领域的设备维护和故障排除非常重要。
另外,斜坡响应方法还可以应用于信号处理和通信系统的建模与辨识。
通过斜坡响应方法可以确定信号处理和通信系统的传输特性,从而更好地理解信号传输过程,并进行性能分析和优化。
此外,斜坡响应方法还可以应用于车辆动力学、航天器控制、医学诊断等领域。
这些领域的系统往往复杂多变,而斜坡响应方法可以提供一种简单而有效的辨识途径,帮助工程师更好地理解和控制系统。
系统辨识及自适应控制实验报告实验报告:系统辨识及自适应控制1.引言系统辨识和自适应控制是现代自动控制领域中的重要研究内容。
系统辨识是通过采集系统输入输出数据,建立数学模型描述系统的动态行为。
自适应控制则是根据系统辨识得到的模型,调整控制器参数以适应系统的变化和外部干扰。
本实验旨在通过实际操作,掌握系统辨识和自适应控制的基本原理和方法。
2.实验目的1)了解系统辨识的基本原理和方法;2)掌握常见的系统辨识方法,包括参数辨识和频域辨识;3)理解自适应控制的基本原理和方法;4)熟悉自适应控制的实现过程;5)通过实验验证系统辨识和自适应控制的有效性。
3.实验原理3.1系统辨识原理系统辨识的目标是通过采集系统输入输出数据,建立数学模型来描述系统的动态特性。
常见的系统辨识方法包括参数辨识和频域辨识两种。
参数辨识是通过拟合实际测量数据,找到最佳的模型参数。
常用的参数辨识方法有最小二乘法、极大似然法和最小误差平方等。
频域辨识则是通过对输入输出信号的频谱分析,得到系统的频率响应特性。
常用的频域辨识方法有傅里叶变换法、相关分析法和谱估计法等。
3.2自适应控制原理自适应控制是根据系统辨识得到的模型,调整控制器参数以适应系统的变化和外部干扰。
自适应控制分为基于模型的自适应控制和模型无关的自适应控制。
基于模型的自适应控制利用系统辨识得到的模型参数,设计相应的控制器来实现自适应控制。
常见的基于模型的自适应控制方法有模型参考自适应控制和模型预测自适应控制等。
模型无关的自适应控制则不依赖于系统辨识的模型,而是根据实际测量数据直接调整控制器参数。
常见的模型无关的自适应控制方法有自适应滑模控制和神经网络控制等。
4.实验内容4.1系统辨识实验在实验中,我们通过采集系统输入输出数据,根据最小二乘法进行参数辨识。
首先设置系统的输入信号,如阶跃信号或正弦信号,并记录对应的输出数据。
然后根据采集到的数据,选取适当的模型结构,通过最小二乘法求解最佳的模型参数。
一、背景为深入贯彻落实全国、全省组织工作会议精神,推动组织工作重点任务落实,我单位于近期开展了闭环管理研判工作。
通过盘点研判工作,肯定成绩、指出问题、研究思路,切实增强抓落实的主动性自觉性,推动各项工作有力有序有效开展。
二、工作方法与措施1. 成立工作小组:我单位成立了由主要领导牵头的闭环管理研判工作小组,负责统筹协调、组织实施和督促检查。
2. 制定工作方案:工作小组根据实际情况,制定了详细的闭环管理研判工作方案,明确了工作目标、任务分工、时间节点和保障措施。
3. 采取务虚定目标:年初,部务会分领域召开工作务虚会,盘点总结、集思广益,高标准形成年度工作报告,条目式制定组织工作要点,项目化分解重点任务台账,按月细化下发任务清单。
4. 盯节点抓调度:部领导每周以例会形式调度科室工作,办公室每月通报科室任务进展情况,部领导每季度召开分管领域工作推进会,部务会年中集中调度盘点。
5. 差异化考核:针对不同科室、不同岗位,制定差异化考核标准,对工作成效进行量化考核。
6. 强化监督问责:对工作推进过程中出现的问题,及时进行整改,对责任不落实、工作不力的,严肃追究相关责任人责任。
三、工作成效1. 工作任务清单化:通过建立清单,明确任务分工,确保各项工作有序推进。
2. 调度机制常态化:通过定期调度,及时了解工作进展,确保各项工作按时完成。
3. 考核体系科学化:通过差异化考核,激发干部职工的工作积极性,提高工作效率。
4. 监督问责严格化:对工作推进过程中出现的问题,及时进行整改,确保工作落到实处。
四、存在问题及改进措施1. 存在问题:部分科室对任务清单的理解和把握不够准确,导致工作推进不力。
改进措施:加强宣传培训,提高科室对任务清单的掌握程度,确保工作有序推进。
2. 存在问题:部分工作推进过程中存在沟通不畅、协作不紧密的问题。
改进措施:加强部门之间的沟通协作,建立健全信息共享机制,确保工作顺利推进。
3. 存在问题:部分考核指标不够科学,难以全面反映工作成效。
《工业控制计算机》2020年第33卷第6期基于间接辨识方法的闭环系统辨识∗李光(广东科贸职业学院信息与自动化学院,广东广州510430)侯丽(广东工商职业技术大学智能制造与汽车工程学院,广东肇庆526020)Closed-loop System Identification Based on Indirect Identification Method 摘要:针对单输入-单输出离散闭环系统问题,采用开环系统中的递推最小二乘法来进行参数估计。
利用间接辨识方法,根据闭环系统的输入输出信号,用开环辨识的方法推导得到闭环系统的传递函数,再由已知的控制器传递函数推导出对象的辨识模型。
最后,通过MATLAB 进行仿真,验证了间接辨识的方法对闭环系统进行参数估计。
关键词:闭环系统;递推最小二乘法;间接辨识法Abstract 押To solve the problem of single -input -single -output discrete closed -loop systems熏the recursive least squares method is used to estimate the parameters of open-loop systems.According to the principle of indirect identification method熏the transfer function of closed-loop system is obtained by using open-loop identification method according to the input and output signals of closed -loop system熏and then the identification model of the plant is derived from the known controller transfer function.Finally熏the method of indirect identification is verified by MATLAB simulation to estimate the parameters of closed-loop system.Keywords 押closed loop system熏recursive least square method熏indirect identification method∗广东省普通高校青年创新人才项目(2018KQNCX410)现实生活中的很多问题,如循环流化床锅炉床温控制问题[1]、风场发电问题[2]、机器人模型参数辨识[3-4]等,由于实际系统运行稳定性的需要,可在闭环条件下利用测得的数据对对象进行辨识[5]。
闭环系统辨识气动参数辨识在导弹研发中的作用气动力参数辨识是飞行器系统辨识中发展最为成熟的一个领域。
对于导弹而言,采用系统辨识技术从飞行试验数据获取导弹空气动力特性,已经成为导弹研制和评估程序的重要组成部分。
导弹气动参数辨识的作用主要体现在以下几个方面:(1)验证气动力数值计算和风洞试验结果。
如前所述,数值计算和风洞试验各有其优点,也各有其局限性,必须通过飞行试验进行验证。
如果飞行试验气动参数辨识结果与数值计算和风洞试验结果一致,则说明数值计算和风洞试验结果是正确的;如果不一致,就要找出产生不一致的原因,通过相关性分析,将地面试验结果换算到真实飞行状态下。
(2)为导弹系统仿真提供准确的气动参数。
在导弹打靶仿真中,控制系统的执行元件、旋转台、控制系统、目标源等都可以采用实物,但导弹所受外作用力,特别是空气动力是飞行状态参数的函数,无法用实物实现,应代之以数学模型。
该数学模型是否正确决定了系统仿真的置信度,因此,采用系统辨识技术,辨识出导弹的外作用力数学模型,特别是气动力数学模型,是导弹系统仿真技术的关键环节之一。
(3)为导弹飞行控制系统设计提供准确的气动参数。
控制律设计取决于导弹的气动特性。
如果控制律设计所依赖的气动数据误差过大,可能会导致控制失效;如果气动数据误差带很大,为了满足控制系统鲁棒性要求,或者控制精度降低,或者对指令的响应时间加长。
利用飞行试验气动参数辨识结果,经过相关性分析给出的导弹气动特性,其可信度可望显著提高,用于飞行控制律设计,可以大大提高控制系统的性能。
(4)自适应控制。
自适应控制系统能根据系统的状态和环境参数变化,自动调节控制系统的相应系数,以达到最佳控制状态。
系统实时辨识是自适应控制系统的重要组成部分。
对于导弹,机动性与导弹的静稳定裕度和动压关系很大,实时辨识导弹动力学系统与静稳定裕度和动压密切相关的参数,并据之实时改变控制系统的增益系数,可提高导弹的可控性和机动性。
(5)飞行试验故障分析。
对于导弹飞行试验故障分析,气动和动力学分析是其中的一项重要内容,而气动参数辨识是进行气动和动力学分析的有效工具。
气动参数辨识在飞行试验故障分析中已经得到许多成功的应用。
(6)飞行试验落点预报。
在导弹靶场飞行试验中,残骸搜索是一项重要的工作,残骸可以为飞行试验结果分析、事故分析、导弹定型等提供重要依据。
残骸的快速、有效搜索,取决于落点的准确预报。
在导弹飞行试验落点预报中,气动参数辨识是最关键的技术环节。
战术导弹闭环辨识的难点及解决途径系统辨识的效果受到几个因素的制约:待辨识对象的动态特性;所选取的模型结构与相应的参数化方式;采用的辨识方法和准则;系统辨识进行的实验条件。
从某种意义上说,实验条件可分开环和闭环两种工况,如下图1和图2所示,针对这两种状态的辨识也分别称为开环系统辨识和闭环系统辨识。
开环系统的输入与输出信号之间不相关,系统的输出仅仅反映系统输入和系统本身的特性,系统辨识可以对输入和输出信号分别测量和处理,数据处理比较简单明确;闭环状态输出信号不仅反映系统特性,还包括反馈装置的特性,辨识时要从输出的可观测量中将系统特性和反馈装置特性区别出来,这样一来问题就复杂化了。
尽管闭环系统辨识比开环系统辨识复杂,但是有时某些工程应用中要求辨识试验必须在闭环条件下进行,比如,静不稳定飞机飞行试验时不可断开飞控系统,否则可能会造成灾难性的后果;再如,在经济、生物等领域中,许多系统往往还存在固有的、无法断开的或隐蔽的反馈;还有出于系统运行安全性、经济性的考虑,利用在线辨识进行控制的系统也需要闭环系统辨识,以免系统工况偏离正常值太远而发生危险或影响产品质量。
因此,根据闭环条件下测得的试验数据对对象进行辨识往往不可避免。
闭环系统辨识研究成为近年来系统辨识方法研究的重要发展方向,在今后工程中的应用也将愈来愈多。
图1 开环系统(前馈控制)图2 闭环系统(反馈控制)对于战术导弹,大攻角机动是其重要的战术技术指标之一。
在大攻角下,导弹的空气动力特性十分复杂。
绕细长导弹的流动结构,可分成四种主要的流动形态。
当攻角从0°增加到90°时,出现无涡流动、对称涡流动、定常非对称涡流动、尾迹状流动区域。
在较大攻角下,非对称前体涡产生较大的侧向力和偏航力矩。
当非对称涡与弹翼相互作用时,导弹的空气动力特性更为复杂。
此外,战术导弹作大攻角机动时,非定常气动效应可能很显著。
因此,基于安全性与稳定性要求,战术导弹的飞行试验通常是在闭环控制状态下进行的,根据闭环条件下测得的试验数据辨识导弹气动参数已成为获取导弹在典型状态下的非定常气动力特性的一条可行途径。
人们从实践中发现,许多成熟的经典辨识方法,如预报误差法、辅助变量法、相关分析法、频谱分析法等,在开环实验条件下均能获得满意的效果。
然而,由于反馈的存在,使得闭环控制系统中的输入输出数据中有关系统动态特性的信息量减少,同时引起输入输出数据相关,由此造成闭环系统的可辨识性和辨识精度问题变得更为严重,直接将上述方法应用于闭环条件下对象的辨识时,将存在较大的估计偏差,甚至会导致对象的不可辨识性。
对于战术导弹而言,由于控制系统抑制了相关运动模态,通常情况下,试验数据所含关于待辨识气动参数的信息量很少。
此外,由于控制系统的作用,输入(舵偏角)与输出(攻角、侧滑角、角速率、加速度)之间存在一定程度的相关性。
这些因素都将增加闭环气动参数辨识的难度。
针对战术导弹闭环控制下气动参数辨识中存在的困难,在最大似然辨识方法的基础上,采用近年来较为流行的粒子群优化算法作为迭代计算方法,从而替代原有的梯度类算法(如Newton-Raphson算法)。
导弹气动参数的可辨识性和辨识准度固然取决于所采用的数学模型和辨识算法,但更重要地取决于飞行试验数据所含待估计参数的信息量和测量数据的精度。
不同的控制输入激发出动力学系统的不同运动模态,试验数据所含动力学系统待估计参数的信息量也就不同,例如当仅对导弹施加俯仰舵偏信号时,则导弹在铅垂平面做俯仰运动,此时记录下的试验数据只能用于辨识与纵向俯仰运动有关的气动参数,因为导弹没有激发横向运动模态,也就无法辨识与横向运动有关的滚转气动参数。
由此可见,控制输入决定了系统的输出特性,从而决定了系统参数的可辨识性和辨识准度。
从这个意义上讲,输入信号的设计是系统辨识的基础。
特别是对于战术导弹,控制系统抑制了导弹运动模态的充分激发,如果不进行控制输入设计,飞行试验数据包含的气动信息将十分有限,不利于气动参数辨识。
此外,高性能的飞行试验通常包括大攻角飞行,有时还会使用失速模型。
在这种情况下,由于急剧的高度损失,飞行试验时间受到严格限制,要求在飞行的单位时间内数据所包含的信息量必须达到最大化来有效利用昂贵的飞行试验时间。
这些实际考虑都说明了输入设计在气动参数辨识中的重要性。
闭环系统参数辨识方法研究系统辨识中的闭环问题作为一类特殊的辨识问题,近年来越来越受到人们的关注。
Soderstrom 指出,由于输出信号的干扰噪声通过反馈环节与输入信号相关,直接采用频谱分析法,辨识结果将是对象传递函数与反馈传递函数倒数间的一个加权平均值;Ljung 的理论分析表明,如果采用预报误差法进行开环辨识时,只要对象模型集包含真实对象的动态特性,即使噪声模型不足以描述噪声的真实动态特性,仍可获得对象的一致无偏估计,而将此方法直接用于闭环辨识时,只要噪声模型不能精确描述真实噪声,即使对象模型集包含了真实对象动态特性,得到的将是对象参数的有偏估计;Gustavsson 则举出了反馈环节是比例调节器时,直接采用预报误差法将导致对象不可辨识性的实例。
对上述问题的解决,存在三种经典的解决方法:直接法、间接法、联合输入输出法。
(1)直接辨识法。
直接法是利用闭环条件下得到的数据,直接把对象当作在开环环境中进行辨识。
但要保证系统的可辨识性及对象参数估计的一致无偏性,采用直接法时必须满足条件:①存在足够的外部激励信号;②控制器的阶数足够高;③控制器在不同的模式间切换;④控制器时变、非线性。
(2)间接辨识法。
间接法的思想是先根据闭环系统的输入输出信号用开环辨识方法得到闭环系统的传递函数,再由已知的控制器传递函数推导出对象的辨识模型。
(3)联合输入输出法。
将闭环系统的输入输出统一看作为白噪声驱动系统产生的输出信号。
先辨识出整个系统的传递函数矩阵,然后利用传递函数矩阵中的分块矩阵与系统各环节传递函数的关系,求出各环节的传递函数。
经典闭环辨识法在许多方面并不尽如人意:直接法虽然简洁,但必须满足较为苛刻的条件;间接法与联合输入输出法实验前要知道反馈控制器的传递函数,并且需要至少三个可检测的信号,此外,闭环系统与开环对象模型间的参数转换导致了繁重的计算工作量。
输入设计研究飞行器的运动历程(动态响应)取决于其控制部件的运动规律。
飞机运动取决于俯仰舵、副翼和方向舵的运动;导弹运动取决于舵面的偏转角和推力作用方向的变化规律。
导弹动力学系统的动态响应特性就是指导弹对控制部件运动的响应特性。
输入设计的目的就是设计导弹控制部件的运动规律,使飞行试验过程可以激发出与待辨识参数相关的运动模态,提供辨识所需的足够的信息量。
在飞行试验中最常用的基本输入信号是阶跃输入、方波输入、偶极方波输入、“3211”输入、振荡型输入等,下面分别对这些输入信号进行简要介绍。
1、阶跃输入阶跃输入信号是最简单的信号,但它只在低频区域含有能量,不能用于激发高频振荡模态的响应,而且阶跃输入常使飞行器偏向某方向运动而离开线性区域。
阶跃输入的数学模型为2、方波输入、偶极方波输入方波输入和偶极方波输入的频谱密度较宽,在高频区域也含有能量(见图1.7),适当调整Δt可以在感兴趣的模态的频率段含有足够的能量,而且克服了阶跃输入使飞行器运动向某一方向偏离的缺点,是个简单而有效的输入信号,在飞机飞行试验中常被采用,其数学模型为方波:偶极方波:3、“3211”输入“3211”多级方波输入是个频带相当宽的信号,通过调整Δt,可以将频带移到试验所希望激发的频带上去。
“3211”输入的数学模型为4、振荡型输入振荡型输入是一个比较容易实现的输入型式,但频谱单一,只当振荡频率与被辨识模态的频率比较相近时才能激发。
振荡型输入的数学模型为以上几种输入信号具有型式简单、易于实现的优点,被广泛应用于飞行器的飞行试验,但同时也存在着频谱较为单一,不能有效激发被辨识模态,大大降低了飞行试验数据所含待辨识参数的信息量,从而严重影响了气动参数的辨识准度。
为了提高辨识精度,就必须使试验能获得与待辨识参数有关的动态响应的最大信息量,依据此目的来设计飞行器动力学系统控制面的运动规律,即最优输入设计。
最早研究动态系统最优输入问题的是莱文(M J Levin),之后加莱克(P HGarlach)研究了飞行器参数辨识的最优输入。