实时精密单点定位
- 格式:doc
- 大小:37.50 KB
- 文档页数:4
基于SSR信息的GPS实时精密单点定位性能分析赵爽; 杨力; 郜尧【期刊名称】《《大地测量与地球动力学》》【年(卷),期】2019(039)009【总页数】4页(P952-955)【关键词】实时数据流; SSR信息; 精密单点定位; 收敛时间; 定位精度【作者】赵爽; 杨力; 郜尧【作者单位】信息工程大学地理空间信息学院郑州市科学大道62号 450001; 中国人民解放军31009部队北京市 100088【正文语种】中文【中图分类】P228传统精密单点定位(precise point positioning,PPP)需要精密卫星轨道和钟差的支持,但这些精密产品往往存在一定的时延,不能满足实时应用。
超快速产品IGU虽然能实时得到,但由于其预报钟差精度较低,不能满足PPP的需求。
为此,IGS从2013-04-01起正式运行实时实验计划[1],利用全球GNSS跟踪站观测数据实时生成包含基于广播星历的卫星轨道和钟差改正数,采用符合RTCM标准的状态空间表示(state space representation,SSR)信息格式发布,基于NTRIP(networked transport of RTCM via internet protocol)协议向全球播发[2]。
用户可以在任意时间接收IGS及其分析中心播发的数据流产品,并与广播星历结合实时恢复出高精度的卫星轨道与钟差,进而用于实时精密单点定位(real-time PPP,RTPPP)。
本文实时接收法国空间研究中心(Centre National d’Etudes Spatiales, CNES)播发的2018-03-22~03-31的数据流,实时恢复出高精度的卫星轨道与钟差,统计数据流产品自身的完整性;然后以IGS最终产品为参考,分析实时恢复得到的轨道和钟差产品的精度;最后选取10个全球分布的IGS测站,结合实时恢复出的轨道和钟差进行PPP解算,以获得实时数据流在RTPPP中的定位性能。
实时精密单点定位研究综述摘要:GPS精密单点定位(PPP)是一种利用高精度的GPS卫星星历和卫星钟差以及双频载波相位观测值,并采用非差模型进行高精度单点定位的方法。
实时精密单点定位技术(RT-PPP)已成为当前GNSS领域的研究热点,也将是目前乃至未来实时高精度动态定位的主要技术手段之一。
本文对其从研究背景、国内外研究现状,以及发展前景等方面进行了综述。
关键词:GPS;实时精密单点定位;研究背景;发展现状;前景1 研究背景全球定位系统GPS(Global Positioning System)是美国从上世纪70年代开始研制,于1994年全面建成的新一代卫星导航定位系统。
目前,GPS以全天候、高精度、自动亿、高效益等显著特点,诸多领域得到了广泛应用。
GPS的出现,给测绘领域带来了一场深刻的技术革命。
传统的GPS单点定位是指利用单台接收机的测码伪距及广播星历的卫星轨道参数和卫星钟差改正进行定位,因其较低的定位精度已不能满足精密导航、大地测量、变形监测、精密工程测量等的要求。
为了提高精度,出现了GPS相对定位,它是用两台以上接收机同步观测相同的GPS卫星,以确定基线端点的相对位置或基线向量。
GPS相对定位通过组成差分观测值来消除接收机钟差、卫星钟差等公共钟差以及减弱对流层延迟、电流层延迟等相关性的影响,因此,它是目前GPS定位中精度最好的一种方法。
PPP技术作为一种最近十几年发展起来的一项GPS定位新技术,在低轨卫星精密定轨、高精度坐标框架维持、区域或全球性科学考察、航空动态测量和海洋测绘等方面具有不可估量的应用前景,目前己经成为GPS导航和定位界的研究热点。
经过近十几年国内外学者的研究,精密单点定位的事后处理算法及应用已经比较成熟。
与相对定位中的实时定位技术RTK相对应,在实时GPS卫星轨道和钟差产品的支持下,精密单点定位的数据处理可以在实时情况下进行,得到实时定位结果,称之为实时PPP技术。
实时PPP定位技术与目前已有两种GPS实时定位服务系统(基于单基准站RTK技术系统和基于多基准站的CORS系统)相比具有以下显著优点:1.系统服务覆盖区域大;2.总投资和运营成本低。
简介精密单点定位--precisepointpositioning(PPP)所谓的精密单点定位指的是利用全球若干地面跟踪站的GPS观测数据计算出的精密卫星轨道和卫星钟差,对单台GPS接收机所采集的相位和伪距观测值进行定位解算。
利用这种预报的GPS卫星的精密星历或事后的精密星历作为已知坐标起算数据;同时利用某种方式得到的精密卫星钟差来替代用户GPS定位观测值方程中的卫星钟差参数;用户利用单台GPS双频双码接收机的观测数据在数千万平方公里乃至全球范围内的任意位置都可以2-4dm级的精度,进行实时动态定位或2-4cm级的精度进行较快速的静态定位,精密单点定位技术是实现全球精密实时动态定位与导航的关键技术,也是GPS定位方面的前沿研究方向。
编辑本段精密单点定位基本原理GPS精密单点定位一般采用单台双频GPS接收机,利用IGS提供的精密星历和卫星钟差,基于载波相位观测值进行的高精度定位。
所解算出来的坐标和使用的IGS精密星历的坐标框架即ITRF框架系列一致,而不是常用的WGS-84坐标系统下的坐标,因此IGS精密星历与GPS广播星历所对应的参考框架不同。
编辑本段密单点定位的主要误差及其改正模型在精密单点定位中,影响其定位结果的主要的误差包括:与卫星有关的误差(卫星钟差、卫星轨道误差、相对论效应);与接收机和测站有关的误差(接收机钟差、接收机天线相位误差、地球潮汐、地球自转等);与信号传播有关的误差(对流层延迟误差、电离层延迟误差和多路径效应)。
由于精密单点定位没有使用双差分观测值,所有很多的误差没有消除或削弱,所以必须组成各项误差估计方程来消除粗差。
有两种方法来解决:a.对于可以精确模型化的误差,采用模型改正。
b.对于不可以精确模型化的误差,加入参数估计或者使用组合观测值。
如双频观测值组合,消除电离层延迟;不同类型观测值的组合,不但消除电离层延迟,也消除了卫星钟差、接收机钟差;不同类型的单频观测值之间的线性组合消除了伪距测量的噪声,当然观测时间要足够的长,才能保证精度。
精密单点定位ppp精密单点定位(precise point positioning ,缩写PPP,指的是利用全球若干地面跟踪站的GPS观测数据计算出的精密卫星轨道和卫星钟差对单台GPS接收机所采集的相位和伪距观测值进行定位解算。
在卫星导航应用之中,GPS作为定位的意义越来越重要,不论是军事上还是工程等方面上,导航定位的研究依然是一个不老的研究主题。
精密单点定位更是导航定位中的一个很值得研究的问题。
PPP根本上讲属于单点定位范畴,那么单点定位又是怎样进行测量定位的呢?单点定位是利用卫星星历和一台接收机确定待定点在地固坐标系中绝对位置的方法,其优点:一台接收机单独定位,观测组织和实施方便,数据处理简单;缺点:精度主要受系统性偏差(卫星轨道、卫星钟差、大气传播延迟等)的影响,定位精度低。
应用领域:低精度导航、资源普查、军事等。
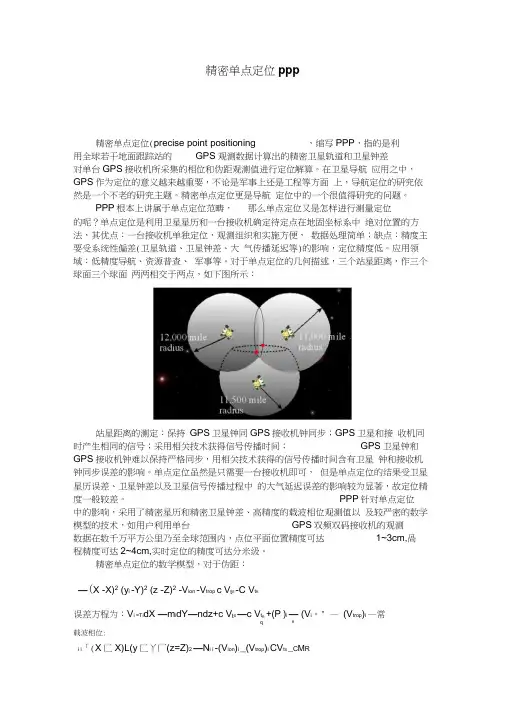
对于单点定位的几何描述,三个站星距离,作三个球面三个球面两两相交于两点,如下图所示:站星距离的测定:保持GPS卫星钟同GPS接收机钟同步;GPS卫星和接收机同时产生相同的信号;采用相关技术获得信号传播时间;GPS卫星钟和GPS接收机钟难以保持严格同步,用相关技术获得的信号传播时间含有卫星钟和接收机钟同步误差的影响。
单点定位虽然是只需要一台接收机即可,但是单点定位的结果受卫星星历误差、卫星钟差以及卫星信号传播过程中的大气延迟误差的影响较为显著,故定位精度一般较差。
PPP针对单点定位中的影响,采用了精密星历和精密卫星钟差、高精度的载波相位观测值以及较严密的数学模型的技术,如用户利用单台GPS双频双码接收机的观测数据在数千万平方公里乃至全球范围内,点位平面位置精度可达1~3cm,咼程精度可达2~4cm,实时定位的精度可达分米级。
精密单点定位的数学模型,对于伪距:—(X -X)2 (y i -Y)2 (z -Z)2 -V ion -V trop c V t S -C V t R误差方程为:V i =Ti dX —m i dY—ndz+c V t S —c V t R+(P°)i — (V i。
中国空间科学技术F e b 25㊀2021㊀V o l 41㊀N o 1㊀29G37C h i n e s eS p a c eS c i e n c ea n dT e c h n o l o g yI S S N 1000G758X ㊀C N 11G1859/V h t t p :ʊz g k jc a s t c n D O I :10 16708/jc n k i 1000G758X 2021 0004应用i G M A S 超快速星历的实时精密单点定位研究徐伟证1,康国华1,∗,彭攀2,周宏涛1,刘宗强1,赵腾11.南京航空航天大学航天学院,南京2100162.上海卫星工程研究所,上海201109摘㊀要:中国主导建设的国际G N S S 监测评估系统(i GMA S )相比国际上比较成熟的I G S 系统在产品精度等方面存在差别,目前实时精密单点定位应用多采用I G S 实时㊁近实时产品.为改变这一现状,针对i GMA S 产品特性以及实时精密单点定位对超快速精密星历的需求,对i GMA S 超快速星历的精度和稳定性方面进行评估,设计了i GMA S 产品实时/事后下载应用程序,开展了基于i GMA S 超快速星历的实时精密单点定位研究,并结合N o v A t e lO E M 617双频接收机进行了G P S 实时精密单点定位试验.实验结果表明,在连续观测23m i n 后定位误差即可收敛到分米级,较接收机原始定位精度高一个量级,且稳定性好,最终在E /N /U 方向定位误差均方根分别为7.2c m ㊁6.4c m ㊁15.2c m ,与应用I G S 超快速星历实时P P P 试验取得相近的结果.研究实现了i GMA S 数据获取㊁评估和实时P P P 应用的一整套方案,验证了i GMA S 超快速产品的性能,对推进i GMA S 产品的应用提供了借鉴.关键词:i GMA S ;超快速星历;实时下载;精度和稳定性;实时精密单点定位中图分类号:P 228㊀㊀㊀㊀文献标识码:A收稿日期:2020G04G13;修回日期:2020G05G09;录用日期:2020G05G19;网络出版时间:2020G06G18㊀15:32基金项目:上海航天科技创新基金(S A S T 2018G047);空间智能控制技术重点实验室开放基金(K G J Z D S Y S G2018G07)∗通信作者.E Gm a i l :k a n g gh @n u a a .e d u .c n 引用格式:徐伟证,康国华,彭攀,等.应用i GMA S 超快速星历的实时精密单点定位研究[J ].中国空间科学技术,2021,41(1):29G37.X U W Z ,K A N G G H ,P E N GP ,e t a l .R e s e a r c ho nr e a l Gt i m e p r e c i s e p o i n t p o s i t i o n i n g w i t h i GMA Su l t r a Gf a s t e ph e m e r i s [J ].C h i n e s e S p a c eS c i e n c e a n dT e c h n o l o g y,2021,41(1):29G37(i nC h i n e s e ).R e s e a r c ho n r e a l Gt i m e p r e c i s e p o i n t p o s i t i o n i n g wi t h i G M A S u l t r a Gf a s t e ph e m e r i s X U W e i z h e n g 1,K A N GG u o h u a 1,∗,P E N GP a n 2,Z H O U H o n g t a o 1,L I UZ o n g q i a n g 1,Z H A OT e n g11.S c h o o l o fA s t r o n a u t i c s ,N a n j i n g U n i v e r s i t y o fA e r o n a u t i c s a n dA s t r o n a u t i c s ,N a n j i n g 210016,C h i n a 2.S h a n g h a i I n s t i t u t e o f S a t e l l i t eE n g i n e e r i n g ,S h a n gh a i201109,C h i n a A b s t r a c t :T h eC h i n a Gl e d I n t e r n a t i o n a lG N S SM o n i t o r i n g &A s s e s s m e n t S y s t e m (i GMA S )d i f f e r s f r o mt h e I G S s ys t e m (i n t e r n a t i o n a lG N S Ss e r v i c e ,I G S )i n p r o d u c ta c c u r a c y .R e a l Gt i m e p r e c i s e p o i n t p o s i t i o n i n g (P P P )a p pl i c a t i o n sa r e m o s t l y b a s e do n I G Sr e a l Gt i m ea n dn e a r r e a l Gt i m e p r o d u c t s .T o i m pr o v e t h i ss i t u a t i o n ,w ea i m e da t i GMA S p r o d u c t c h a r a c t e r i s t i c s a n dt h ed e m a n df o ru l t r a Gf a s t p r o d u c t s w i t hr e a l Gt i m eP P P ,e v a l u a t e dt h ea c c u r a c y a n ds t a b i l i t y of i GMA Su l t r a Gf a s t e p h e m e r i s ,d e s ig n e da n i GMA S p r o d u c t r e a l Gt i m e /p o s t Ge v e n t d o w n l o a da p p l i c a t i o n ,a n dc a r r i e do u t r e a l Gt i m e p r e c i s e p o i n t p o s i t i o n i n g r e s e a r c hb a s e do ni GMA Su l t r a Gf a s te ph e m e ri st h r o u g hc o m b i n i n g w i t h N o v A t e l O E M 617d u a l Gf r e q u e n c y r e c e i v e r .T h ee x p e r i m e n t a lr e s u l t ss h o w t h a tt h e p o s i t i o n i n g e r r o rc a n c o n v e r get ot h e d e c i m e t e r l e v e l a f t e r 23m i n u t e s ,w h i c h i sa no r d e ro fm a g n i t u d eh i g h e r t h a nt h eo r i g i n a l p o s i t i o n i n g a c c u r a c y of t h e r e c e i v e r a n dh a sg o o d s t a b i l i t y .Th e r o o tm e a n s q u a r e e r r o r o f t h e p o si t i o n i n g e r r o r i n t h eE /N /Ud i r e c t i o n i s 7.2c m ,6.4c m ,15.2c m ,s i m i l a r t o I G Su l t r a Gf a s t e p h e m e r i s i nr e a l Gt i m eP P Pe x p e r i m e n t .T h i s s t u d y i m p l e m e n t s a c o m pl e t e30㊀中国空间科学技术F e b 25㊀2021㊀V o l 41㊀N o 1s o l u t i o n f o r i GMA Sd a t a a c q u i s i t i o n,e v a l u a t i o n,a n d r e a lGt i m eP P Pa p p l i c a t i o n s,v e r i f i e s p e r f o r m a n c e o f i GMA Su l t r aGf a s t p r o d u c t s a n d p r o v i d e s r e f e r e n c e f o r t h e a p p l i c a t i o no f i GMA S p r o d u c t s.K e y w o r d s:i GMA S;u l t r aGf a s t e p h e m e r i s;d o w n l o a d i n r e a l t i m e;a c c u r a c y a n d s t a b i l i t y;r e a lGt i m e p r e c i s e p o i n t p o s i t i o n i n g为了进一步推动多模G N S S系统兼容和互操作,中国从2012年启动国际G N S S监测评估系统(I n t e r n a t i o n a l G N S S M o n i t o r i n g& A s s e s s m e n tS y s t e m,i GMA S)建设.i GMA S 旨在建立我国自主的B D S㊁G P S㊁G L O N A S S和G a l i l e o导航卫星全弧段㊁多重覆盖的全球近实时跟踪网,监控G N S S导航卫星的运行状况㊁信号质量和服务性能[1G2].i GMA S能够向全球用户提供精密星历㊁钟差㊁地球定向参数等产品,为卫星导航技术试验提供支持,服务于科学研究以及各类应用,包括精密单点定位(P r e c i o u sP o i n t P o s i t i o n i n g,P P P)技术[3].相对于事后处理的精密单点定位,实时精准定位才能满足5G㊁物联网和无人驾驶等技术发展的需求,其中高质量精密星历㊁钟差改正产品的实时获取和应用是难点之一[4].目前国际上开展实时P P P应用主要基于I G S实时㊁近实时产品,包括I G S实时定位服务(r e a lGt i m es e r v i c e)㊁I G D G (I n t e r n e tGB a s e d G l o b a lD i f f e r e n t i a lG P S)实时产品和B N C(B K G N t r i p C l i e n t)软件等,以及西班牙GMV公司㊁T r i m b l e公司等推出的商业实时P P P服务[5G7].与国际上比较成熟的I G S系统相比,我国主导的i GMA S建设周期短,跟踪站㊁分析中心和数据中心数量相对较少,因此i GMA S产品(特别是超快速产品)的实际应用仍需进一步发展.目前,国内外应用i GMA S超快速产品开展的实时精密单点定位研究,主要依靠跟踪站的观测数据模拟实时P P P解算[6,8,9],未能解决i GMA S超快速数据的实时获取和普遍实用问题.针对i GMA S产品的应用推广和实时P P P 对超快速精密数据的需求,本文对i GMA S超快速星历产品精度和稳定性进行分析,并通过高精度的I G S最终产品进行评估.本文以评估结果作为依据选择精密改正数,设计了i GMA SGD o w n l o a d实时下载程序和实时P P P算法,通过N o v A t e l双频接收机验证了其在实时P P P中的性能,为i GMA S产品的应用提供借鉴思路.1㊀i GMA S超快速星历质量分析1.1㊀超快速星历精度分析i GMA S和I G S卫星精密轨道均包括三种不同精度和时延的数据,即超快速㊁快速和最终产品.其中超快速产品包含24h观测数据和24h预测数据,更新频率为6h,分别于当日03㊁09㊁15㊁21时左右发布,虽然存在约3h滞后时间,但基本可以满足实时定位的需求[10].I G S已经在全球建立507个跟踪站,建有充足的分析中心㊁全球关联分析中心㊁区域关联分析中心及分析中心协调组织来协同处理数据,其最终产品轨道精度约2.5c m,钟差精度约0.075n s[4,8].本文以精度较高的I G S MG E X (T h e M u l t iGG N S SE x p e r i m e n t)最终产品为参考标准,结合实时精密单点定位需求,选取i GMA S和I G S系统在2019年7月7日至13日(北斗周0705)的精密星历数据,计算一周时间内i GMA S超快速星历相对I G S最终产品参考真值的均方根误差(R o o tM e a nS q u a r e,R M S),评估其数据的精度和稳定性.其中I G S最终产品从C D D I S(T h e C r u s t a l D y n a m i c s D a t a I n f o r m a t i o nS y s t e m)获取,i GMA S超快速产品从武汉数据中心获取[11,12].i GMA S超快速轨道㊁钟差产品和I G S最终产品采样间隔均为15m i n,但I G S产品采用G P S时间系统(G P S T),i GMA S产品采用B D S 时间系统(B D T),进行质量评估需进行时间基准的协调.本研究在精密轨道和钟差计算时以G P S T作为时间基准,B D T与G P S T的转换关系为[13]:G P S T=B D T+14+τU T C(U S U N)-U T C(N T S C)(1)其中τU T C(U S U N)-U T C(N T S C)表示G P S时和北斗时维徐伟证,等:应用i G M A S 超快速星历的实时精密单点定位研究31㊀持的协调世界时之间的微小量差值.从精度㊁阶数和历元间隔三方面衡量,9阶拟合多项式求解G P S 卫星坐标可达毫米级精度,且效果最好[14].因此本文采用9阶切比雪夫多项式拟合来计算轨道数据,选取北斗周0705期间内i GMA S 超快速星历与I G S 最终星历.本文计算i GMA S 超快速轨道与I G S 最终轨道R M S 差值,计算方式如下式所示[15]:R M S x ,y ,z =1M e po c h ðM e po c h i =1(P o s i G MA S x ,y ,z (i )-P o s I G S x ,y ,z (i ))2R M S c l k =1M e po c h ðM e po c h i =1(C l k i G MA S x ,y ,z (i )-C l k I G S x ,y ,z (i ))2式中:P o s i G MA S x ,y ,z ㊁C l k i G MA Sx ,y ,z 分别表示插值后i GMA S 超快速星历卫星坐标㊁钟差;P o s I G Sx ,y ,z ㊁C l k I G Sx ,y ,z 表示I G S 最终星历表示的卫星坐标㊁钟差;M e po c h 表示一周时间内的总历元数.分别对i GMA S 超快速星历和I G S 最终星历合对G P S ㊁G L O N A S S ㊁B D S 和G a l i l e o 系统在北斗周0705期间的轨道数据,各颗卫星轨道误差R M S 和系统整体误差结果如图1所示.1)G P S /G L O N A S S /G a l i l e o /B D S (M E O/I G S O )/B D S (G E O )和系统在北斗周0705期间,系统轨道误差均值分别为5.7c m ㊁9.8c m ㊁14.2c m ㊁18.0c m ㊁393.7c m ;B D S (G E O )卫星相对地面站空间几何构型较差,参数相关性强而很难精确求解,故精度较低.2)由图1(a )~(e )可见,各系统卫星的轨道误差R M S 分布较为均匀,系统轨道精度依次是G P S ㊁G L O N A S S ㊁G a l i l e o ㊁B D S (M E O /I G S O )㊁B D S (G E O );G P S 卫星轨道精度稳定在厘米级,且误差R M S 更为集中,主要得益于目前I G S 地面跟踪站较多,更为丰富的观测数据有助于减小随机误差.3)由图1(b )(e )可知,i GMA S 数据目前提供的北斗卫星精密数据远少于实际在轨北斗卫星数,且系统间卫星轨道精度较为离散.主要原因是北斗导航系统近两年卫星部署较多,在轨调试需要时间,而i GMA S 跟踪站数量少且分布集中,对北斗导航系统的监测质量和完善仍有待提升.图1㊀i GMA S 超快速星历与I G S 星历各系统轨道差值F i g .1㊀F o u r n a v i g a t i o n s y s t e m s o r b i t e r r o r b e t w e e n i GMA Su l t r a Gf a s t e ph e m e r i s a n d I G S f i n a l p r o d u c t32㊀中国空间科学技术F e b 25㊀2021㊀V o l 41㊀N o 1通过对四大导航系统i GMA S 超快速星历的评估,可见G P S 卫星星历精度在厘米级.卫星钟差同样是影响实时精密单点定位的重要因素,因此本文针对G P S 系统的卫星轨道和钟差做了进一步误差分析,各颗卫星在E C E F 坐标系下X ㊁Y ㊁Z 和3D 方向误差如图2所示,各颗卫星和系统均值的钟差如图3所示.在评估周期内,各颗卫星的X ㊁Y ㊁Z 方向的轨道误差R M S 均在2.0~5.5c m 范围内,且Z 方向轨道误差略优于X ㊁Y 方向,各颗卫星3D 误差均值为5.78c m .各颗G P S 卫星的钟差集中在2.94~3.1n s 区间内,系统均值优于3n s ,需要基于超快速轨道对钟差进一步估计才能满足厘米级定位需求.图2㊀i GMA S 超快速与I G S 最终产品G P S 卫星差值R M SF i g.2㊀G P So r b i t e r r o r b e t w e e n i GMA S U l t r a Gf a s t a n d I G S f i n a l pr o d u ct 图3㊀i GMA S 超快速与I G S 最终产品的G P S 卫星钟差F i g.3㊀G P Ss a t e l l i t e c l o c ke r r o r b e t w e e n i GMA S U l t r a Gf a s t a n d I G S f i n a l pr o d u c t 1.2㊀超快速星历稳定性分析实时P P P 应用性能与精密星历的稳定性紧密相关.本文主要从系统轨道精度在一定周期内的变化趋势,以及超快速星历观测和预报部分的精度变化趋势来评估其数据稳定性.在北斗周0705期间四大导航系统每天卫星及星座轨道误差R M S ,在拟合期间变化趋势如图4所示,图5表示G P S 卫星轨道变化.1)由图4可见在拟合周期内G P S 星座系统稳定性最优,轨道整体误差和仿真周期内波动均相对最小;G L O N A S S 稳定性次之,存在小范围波动,应与当日观测数据质量有关;B D S (M E O/I G S O )以及G a l i l e o 导航系统相对波动较大.2)由图4可见在拟合周期内,G P S ㊁G L O N A S S 和G a l i l e o 系统不同卫星的轨道误差R M S 变化趋势相同,轨道误差同步增大或减小;B D S (M E O /I G S O )存在系统间定轨精度离散性相对较大的情况,更说明i GMA S 需要建设全球分布监测站或低轨星基监测站,以提升北斗导航系统整体稳定性.3)由图5可见G P S 卫星在拟合周期内,所有卫星的轨道误差范围均在3.4~8.2c m ,不同卫星在同一天的轨道误差差别较小,误差范围集中且系统整体定轨精度高;G P S 系统有完善的全球分布的跟踪站,可以实现卫星的全弧段多重覆盖.图4㊀四系统轨道误差在拟合周期内的变化趋势F i g.4㊀G P S ㊁G L O N A S S ㊁B D S (M E O /I G S O )㊁G a l i l e oo r b i t e r r or图5㊀i GMA S 超快速轨道相对I G S 最终轨道差值变化F i g .5O r b i t d i f f e r e n c e c h a n ge sb e t w e e n i GMA Su l t r af a s t o r b i t a n d I G S f i n a l pr o d u c t (G P S )i GMA S 超快速星历在一周拟合周期内G P S 系统定轨精度在厘米级且最稳定,目前依徐伟证,等:应用i G M A S 超快速星历的实时精密单点定位研究33㊀靠i GMA S 超快速星历开展实时精密单点定位试验可优先选取G P S 卫星观测值参与定位解算,卫星数量不足的情况下,可以用G L O N A S S 系统联立组合精密单点定位.i GMA S 超快速星历观测和预测部分相对I G S 最终产品的误差分别如图6(a )(b )所示.在拟合周期内,观测部分星历相对精度高且稳定,除个别卫星外,X ㊁Y ㊁Z 方向误差大致在ʃ6c m 范围内.预测部分的轨道误差相对较大,部分卫星超过10c m 范围,且随预测时间越长轨道精度越低,因此实时P P P 试验需要实时获取最新的i GMA S 超快速星历,以实现最优精度的卫星端误差消除.图6㊀i GMA S 超快速星历观测㊁预测部分与I G S最终精密星历差值变化F i g .6㊀E r r o r c h a n g e o f i GMA Su l t r a Gf a s t e ph e m e r i s o b s e r v a t i o n ,p r e d i c t i o n p a r t a n d I G S f i n a l e ph e m e r i s 2㊀基于i GMA S 产品的实时P P P 定位2.1㊀实时P P P 定位方案设计i G M A S 超快速星历的评估结果分析表明,目前G P S 卫星精度最高且稳定性好,G L O N A S S 次之,B D S (M E O /I G S O )和G a l i l e o 系统均存在一定范围的波动,B D S (M E O /I G S O )各颗卫星定轨精度较为离散.i G M A S 超快速星历观测部分精度和稳定性优于预测部份,且随预测时间越长精度越低,选取最近的超快速星历有助于降低卫星轨道和时钟误差.因此,本文设计i G A M S 产品实时/事后下载软件i G M A S GD o w n l o a d ,实时获取最新的超快速星历,采用N o v A t e l 双频接收机获取G P S 卫星观测数据开展实时精密单点定位应用研究,以验证i G M A S 超快速星历在P P P 试验中的实用性能.本研究采用的实时P P P 定位验证方案如图7所示,通过自主设计的i GMA S GD o w n l o a d 应用程序联网实时获取最新的i GMA S 超快速星历㊁钟差.N o v A t e lO E M 617接收机双频伪距㊁载波相位观测数据㊁广播星历和原始定位结果,实时经串口转U S B 通道输入到计算机中,计算机进行观测数据预处理㊁精密数据拟合以及实时P P P 算法,实时输出P P P 定位结果.最后以北斗伴侣M 2R T K 固定解为参考真值,结合接收机原始定位结果和实时P P P 定位结果进行多通道定位结果的误差对比分析,从而验证i GMA S超快速星历在实时P P P 应用中的性能和可用性.图7㊀实时P P P 技术方案设计F i g .7㊀R e a l Gt i m eP P Pt e c h n o l o g y so l u t i o n 2.2㊀i GMA S 数据实时获取和应用i GMA S 已建成长沙㊁武汉㊁西安3个数据中心,用户可通过任一数据中心或直接通过i GMA S 官网(h t t p:ʊ124.205.50.178)获取相关34㊀中国空间科学技术F e b 25㊀2021㊀V o l 41㊀N o 1产品.实时P P P 技术应用需要获取最新的超快速精密星历产品,为了满足本研究实时P P P 算法的需求以及推广i GMA S 数据产品的实际应用,本文基于W i n d o w s 平台设计了实时/事后下载i GMA S 精密数据的应用程序i GMA S GD o w n l o a d,程序下载文件的流程设计如图8所示.该程序包括实时和事后下载两种模式,实时下载数据主要面向i GMA S 超快速星历,其文件命名格式为i s u w w w w d _HH.s p 3/c l k .Z (w w w w 为北斗周;d 为星期,0为星期日,1~6表示星期一至六;HH 为小时,分为00,06,12,18;s p3/c l k 分别表示星历和钟差文件).程序实时刷新i GMA S 数据中心产品列表,根据系统时间匹配最新的超快速产品文件,下载到指定文件夹并自动解压,以备实时P P P 算法读取应用.事后模式可以根据用户需求批量下载其他产品,包括卫星轨道钟差㊁跟踪站地心坐标㊁地球自转参数㊁大气环境参数㊁频间偏差信息㊁电离层闪烁指数㊁民用监测评估结果㊁完好性产品等.图8㊀i GMA S 数据实时下载程序设计流程F i g .8㊀i GMA Sd a t ad o w n l o a d p r o gr a mf l o w c h a r t 2.3㊀实时P P P 算法设计本文采用P P P 常规模型进行解算,采用双频伪距㊁载波相位观测值的无电离层组合作为函数模型,其基础模型表达式为[16G17]:P s I F=f 21P s 1-f 22P s2f 21-f 22=㊀ρs r +T s r +c (δt r -δt s)+δm +εP I F Φs I F =f 21Φs 1-f 22Φs2f 21-f 22=ρs r +T sr +㊀c (δt r -δt s )+λr ,I F b sr ,I F +δm +εΦI Füþýïïïïïïïï(2)式中:P s I F ㊁Φs I F 分别为伪距㊁载波相位无电离层组合观测值;ρs r 为接收机和卫星间几何距离;T s r 为对流层延迟;δt r ㊁δt s分别表示接收机和卫星钟差;δm 为多路径延迟;b sr ,I F 为包含卫星和接收机端初始相位和硬件延迟的无电离层组合模糊度;εP I F 和εΦI F 分别表示两种组合观测值的观测噪声及未被模型化的误差.为保证高精度定位的质量,本文首先剔除低高度角卫星,并依靠高度角权重模型进行定权,定权模型如式(3)所示[18]:δ2(e )=δ2/s i n 2(e )(3)式中:δ2是天顶方向的非差消电离层相位观测值的方差;δ2(e )是在高度角e 处的相位观测值的方差.伪距观测值也在得到天顶方向观测值方差后,采用式(3)进行任意高度角映射,进而计算观测值权阵[18].对观测数据进行实时预处理时,先剔除观测值存在粗差的卫星,再进行钟跳探测与修复,避免将接收机钟跳引起的观测值跳变误判为周跳.然后联合使用宽巷M e l b o u r n e GW u b b e n a (MW )和G e o m e t r y GF r e e (G F )组合法进行周跳探测,对于出现周跳的卫星进行模糊度初始化.通过数据的实时预处理,来消除异常观测数据对P P P 定位结果的影响[19G20].本文采用扩展卡尔曼滤波进行参数估计,待估参数为X =(x ,y ,z ,d t r ,z p d ,N i (i =1~n ))T,依次为接收机位置参数㊁接收机钟差㊁天顶对流层湿延迟㊁可见卫星模糊度参数.精密轨道和钟差等产品采用i GMA S 超快速产品,卫星和接收机端天线相位中心偏差(P C O )和天线相位中心变化(P C V )分别使用I G S A N T E X 文件进行改正.实时定位过程同步使用I G S 超快速产品进徐伟证,等:应用i G M A S超快速星历的实时精密单点定位研究35㊀行数据处理和结果对比.各项误差采用模型进行处理,具体策略如表1所示[9,17].表1㊀P P P各项误差处理方法T a b l e1㊀P P Pe r r o r p r o c e s s i n g s t r a t e g y 误差改正项改正方法㊁模型卫星轨道㊁钟差i GMA S超快速星历㊁钟差电离层延迟双频无电离层组合对流层干延迟H o p f i e l d模型+G P T2+VM F卫星和接收机天线相位中心i g s14.a t x㊀P C O+P C V相位缠绕W u模型相对论效应I E R S协议地球自转改正S a g n a c效应固体潮I E R S协议G O T4.8模型海潮I E R S协议极潮I E R S协议3㊀实时P P P试验与分析3.1㊀实时P P P定位试验环境搭建2019年7月28日14:00G17:30在南京航空航天大学明故宫校区操场开展了实测数据采集和静态精密单点定位试验.当日天气状况良好,实验环境视野开阔无遮挡,数据采样间隔为1秒.使用N o v A t e lO E M617双频接收机(单点定位精度:水平5m,高程10m)实时接收G P S观测数据,截止高度角设为15ʎ,使用北斗伴侣M2R T K固定解(定位精度:水平0.02m,高程0.04m)作为定位结果参考标准.在定位参考点的设计上,通过将N o v A t e l天线和北斗伴侣M2架设到两台三脚架并调整抵消其高度差,预先测量水平和高度误差并在算法中予以修正.实验过程同步使用两台笔记本电脑进行数据读取和程序运算,以提高程序运算结果的可靠性.3.2㊀P P P试验结果分析本文使用i GMA S超快速星历和钟差产品,对G P S实测数据进行实时精密单点定位实验,其定位结果与N o v A t e l接收机自身定位误差对比如图9所示,分别使用i GMA S和I G S超快速星历的实时P P P定位结果相对于参考真值在E N U坐标系下收敛情况如图10㊁图11所示.图9㊀i GMA S超快速星历实时P P P与接收机定位误差对比F i g.9㊀C o m p a r i s o no f p o s i t i o n i n g e r r o r b e t w e e n i GMA Su l t r aGf a s t e p h e m e r i s r e a lGt i m eP P Pa n d r e c e i v er图10㊀i GMA S超快速星历实时P P P定位误差收敛情况F i g.10㊀i GMA Su l t r aGf a s t e p h e m e r i sr e a lGt i m eP P Pc o n v e r g e n ce图11㊀I G S超快速星历实时P P P定位误差收敛情况F i g.11㊀I G Su l t r aGf a s t e p h e m e r i s r e a lGt i m eP P Pp o s i t i o n i n g e r r o r c o n v e r g e n c e1)由图9可知,N o v A t e l接收机自身定位误差波动大,且方程方向误差较大;与接收机原始定位相比,应用i GMA S超快速星历的实时精密单点定位可以有效提升定位精度和稳定性.2)由图10和图11可见,分别使用i GMA S 和I G S超快速星历进行精密单点定位试验,其36㊀中国空间科学技术F e b 25㊀2021㊀V o l 41㊀N o 1收敛时间和定位精度接近,连续观测约20m i n 后,P P P 定位误差即可收敛到分米级,最终可收敛到20c m 以内.3)由图10和图11,以及表2可知,i GMA S超快速星历在实时P P P 试验中可实现与I G S 超快速星历相近的定位结果,应用i GMA S 超快速星历的实时精密单点定位可以有效提升定位精度和稳定性,验证了i GMA S 超快速星历的实用性能.表2㊀接收机和实时P P P 定位误差均方根统计T a b l e 2㊀R o o tm e a n s qu a r e s t a t i s t i c s o f r e c e i v e r a n d r e a l Gt i m eP P P p o s i t i o n i n g er r o r s 参数类别定位误差均方根/c mE N U 收敛至分米级所需时间/m i n接收机定位219.3228.5429.8-i GMA S GP P P 7.26.415.223I G S GP P P6.96.214.7204㊀结束语卫星精密星历是实现P P P 的基础数据,其精度和可用性直接影响导航定位的性能.本文以I G S 最终产品为参考标准,评估了i GMA S 超快速星历的精度和稳定性,设计了i GMA S GD o w n l o a d 应用程序实时获取最新的i GMA S 超快速星历,以其中精度和稳定性较高的G P S 卫星数据,结合N o v A t e l 双频接收机开展了实时P P P 定位算法研究和试验,得到如下结论:1)i G AM S 超快速星历中,G P S 卫星精度和稳定性最高,具有较高的可用性,G L O N A S S 次之,B D S (M E O /I G S O ㊁G E O )和G a l i l e o 系统均存在一定范围的波动.G P S 卫星星历得益于数量众多且全球分布的I G S 跟踪站支持,可以通过全弧段多重覆盖的观测数据来提高精度.2)北斗导航系统精密改正数据,存在卫星数量不足㊁卫星精度相对较低(特别是G E O 卫星),以及系统间卫星轨道误差离散性较大的问题.未来有望通过建设更多全球分布的地面监测站或低轨星基监测站,以及星间链路技术来提升北斗产品的精度.3)本文设计的i GMA S GD o w n l o a d 软件可以实时获取最新i GMA S 超快速星历,基于该数据的G P S 实时P P P 算法在结合N o v A t e l 双频接收机试验中,与应用I G S 超快速星历定位精度和收敛时间接近,验证了i GMA S 超快速产品的应用性能,有助于推动我国i GMA S 产品的实际应用.参考文献(R e f e r e n c e s)[1]㊀C A IH ,C H E N G ,J I A O W ,e t a l .A n i n i t i a l a n a l ys i s a n d a s s e s s m e n to n f i n a l p r o d u c t s o fi GMA S [C ].C h i n a S a t e l l i t eN a v i ga t i o n C o n f e r e n c e(C S N C )2016P r o c e e d i n g s :V o l u m e I I I .S i n g a p o r e :S p r i n ge r ,2016.[2]㊀崔红正,唐歌实,宋柏延,等.北斗卫星导航系统实时定轨与钟差处理策略[J ].中国空间科学技术,2015,35(5):1G7.C U IH Z ,T A N G GS ,S O N G B Y ,e t a l .BD Ss a t e l l i t er e a l t i m e o r b i t a n dc l o c kd e t e r m i n a t i o na n d i n i t i a l r e s u l t s a n a l y s i s [J ].C h i n e s e S p a c e S c i e n c e a n d T e c h n o l o g y,2015,35(5):1G7(i nC h i n e s e ).[3]㊀谭畅,陈国,魏娜,等.i GMA S 轨道产品综合及精度初步分析[J ].武汉大学学报(信息科学版),2016(11):1469G1475.T A N C ,C H E N G ,W E I N ,e ta l .C o m b i n e ds a t e l l i t eo r b i t s o f t h e i GMA S a n a l y s i s c e n t e r s :m e t h o d a n d pr e c i s i o n [J ].G e o m a t i c s a n d I n f o r m a t i o n S c i e n c e o f W u h a nU n i v e r s i t y ,2016(11):1469G1475(i nC h i n e s e ).[4]㊀张小红,李星星,李盼.G N S S 精密单点定位技术及应用进展[J ].测绘学报,2017,46(10):1399G1407.Z H A N G X H ,L IX X ,L IP .R e v i e wo fG N S SP P Pa n di t sa p p l i c a t i o n [J ].A c t a G e o d a e t i c a e t C a r t o g r a p h i c a S i n i c a ,2017,46(10):1399G1407(i nC h i n e s e ).[5]㊀王胜利,王庆,高旺,等.I G S 实时产品质量分析及其在实时精密单点定位中的应用[J ].东南大学学报(自然科学版),2013(S 2):365G369.WA N GSL ,WA N G Q ,G A O W ,e t a l .Q u a l i t y a n a l y s i s o f I G Sr e a l Gt i m e p r o d u c t sa n d i t sa p p l i c a t i o ni nr e a l Gt i m e p r e c i s e p o i n t p o s i t i o n i n g [J ].J o u r n a l o f S o u t h e a s t U n i v e r s i t y (N a t u r a l S c i e n c eE d i t i o n ),2013(S 2):365G369(i nC h i n e s e ).[6]㊀王敏,柴洪洲,阮仁桂,等.基于i GMA S 预报产品的实时精密单点定位性能分析[C ],第七届中国卫星导航学术年会.长沙,2016.WA N G M ,C H A I H Z ,R U A N R G ,e t a l .I n i t i a lpe rf o r m a n c e a s s e s s m e n t o f r e a l Gt i m e p r e c i s e p o i n t p o s i t i o n i ng b a s e d o n i GMA S p r e d i c t i o n p r o d u c t [C ]ʊTh e 7t h C hi n a S a t e l l i t e N a v i g a t i o n A c a d e m i c C o n f e r e n c e .C h a n gs h a ,2016(i nC h i n e s e ).[7]㊀WA N G L ,L I Z ,G E M ,e t a l .I n v e s t i ga t i o n o ft h e p e r f o r m a n c eo fr e a l Gt i m e B D S Go n l y p r e c i s e p o i n t p o s i t i o n i n g徐伟证,等:应用i G M A S超快速星历的实时精密单点定位研究37㊀u s i n g t h e I G S r e a lGt i m e s e r v i c e[J].G P S S o l u t i o n s,2019,23(3).[8]㊀G EY,Y A N GX,Q I N W,e t a l.T i m e t r a n s f e r a n a l y s i s o fG P Sa n dB D S p r e c i s e p o i n t p o s i t i o n i n g b a s e do ni GMA Sp r o d u c t s[C]ʊC h i n a S a t e l l i t e N a v i g a t i o n C o n f e r e n c e.S i n g a p o r e:S p r i n g e r,2018.[9]㊀G E Y,S U NB,WA N GS,e t a l.C o n v e r g e n c e t i m e a n a l y s i s o f m u l t iGc o n s t e l l a t i o n p r e c i s e p o i n t p o s i t i o n i n g b a s e d o ni G M A S p r o d u c t s[C]ʊC h i n aS a t e l l i t eN a v i g a t i o nC o n f e r e n c e(C S N C)2016P r o c e e d i n g s:V o l u m e I I I.S i n g a p o r e:S p r i n g e r,2016.[10]㊀赵兴旺,王胜利,刘超.G N S S精密单点定位理论与方法[M].合肥:中国科学技术大学出版社,2015:53G56.Z HA O X W,WA N GSL,L I UC.G N S S p r e c i s i o n p o i n tp o s i t i o n i n g t h e o r y a n d m e t h o d[M].H e f e i:C h i n aU n i v e r s i t y o f S c i e n c e a n dT e c h n o l o g y P r e s s,2015:53G56(i nC h i n e s e).[11]㊀Y US,X U T.P r e c i s i o ne v a l u a t i o na n dc o n s i s t e n c y a n a l y s i s o fi G M A S o r b i t a n d c l o c k p r o d u c t s[M].S i n g a p o r e:S p r i n g e r,2016.[12]㊀L I U Y,K ES,S U NB,e t a l.C o m p a r i s o no f p e r f o r m a n c e s o f t h r e em u l t iGc o n s t e l l a t i o n p r e c i s e p o i n t p o s i t i o n i n g m o d e l sb a s e do n i G M A S p r o d uc t s[C]ʊC h i n aS a t e l l i t eN a v i g a t i o nC o n f e r e n c e.S i n g a p o r e:S p r i n g e r,2018.[13]㊀李鹤峰,党亚民,秘金钟,等.B D S与G P S㊁G L O N A S S 多模融合导航定位时空统一[J].大地测量与地球动力学,2013,33(4):73G78.L IH F,D A N G Y M,M I J Z,e t a l.R e s e a r c ho n s p a t i ot e m p o r a u n i f i c a t i o n o f B D S/G P S/G L O N A S Sm u l t iGm o d en a v i g a t i o na n d p o s i t i o n i n g[J].J o u r n a lo fG e o d e s y a n dG e o d y n a m i c s,2013,33(4):73G78(i nC h i n e s e).[14]㊀李明峰,江国焰,张凯.I G S精密星历内插与拟合法精度的比较[J].大地测量与地球动力学,2008(2):77G80.L I M F,J I A N G G Y,Z H A N G K.C o m p a r i s o n o fi n t e r p o l a t i n g a n d f i t t i n g I G S p r e c i s e e p h e m e r i s[J].J o u r n a l o fG e o d e s y a n dG e o d y n a m i c s,2008(2):77G80(i nC h i n e s e).[15]㊀李征航.G P S测量与数据处理[M].3版.武汉:武汉大学出版社,2013:77G78.L I ZH.G P Sm e a s u r e m e n t a n d d a t a p r o c e s s i n g[M].3r d e d.W u h a n:W u h a nU n i v e r s i t y P r e s s,2013:77G78(i nC h i n e s e).[16]㊀李博嶙,葛海波,沈云中.无电离层组合㊁U o f c和非组合精密单点定位观测模型比较[J].测绘学报,2015,44(7):734G740.L I BL,G E HB,S H E N YZ.C o m p a r i s o n o f i o n o s p h e r eGf r e e,U o f c a n d u n c o m b i n e dP P Po b s e r v a t i o nm o d e l s[J].A c t aG e o d a e t i c a e tC a r t o g r a p h i c aS i n i c a,2015,44(7):734G740(i nC h i n e s e).[17]㊀G E N GJ,S H I C.R a p i d i n i t i a l i z a t i o n o f r e a lGt i m e P P Pb y r e s o l v i n g u n d i f f e r e n c e dG P Sa n dG L O N A S Sa m b i g u i t i e ss i m u l t a n e o u s l y[J].J o u r n a lo fG e o d e s y,2016,91(4):1G14.[18]㊀Y IC H,Z HU JJ,C H E N Y Q,e ta l.A ni m p r o v e d s t o c h a s t i cm o d e l c o n s i d e r i n g s a t e l l i t ec l o c k i n t e r p o l a t i o ne r r o r i nG P S p r e c i s e p o i n t p o s i t i o n i n g[J].G e o m a t i c s a n dI n f o r m a t i o n S c i e n c e o f W u h a n U n i v e r s i t y,2010,35(10):1165G1168.[19]㊀赵兴旺,张翠英.精密单点定位部分模糊度固定方法[J].中国空间科学技术,2013,33(1):41G48,72.Z HA O X W,Z HA N G C Y.P a r t i a la m b i g u i t y f i x i n gm e t h o da n da n a l y s i sf o r p r e c i s e p o i n t p o s i t i o n i n g[J].C h i n e s eS p a c eS c i e n c e a n dT e c h n o l o g y,2013,33(1):41G48,72(i nC h i n e s e).[20]㊀韩啸,潘树国,赵庆.嵌入式G P S/B D S实时精密单点定位方法[J].测绘通报,2018(2):99G102,163.H A N X,P A N S G,Z HA O Q.E m b e d d e d G P S/B D Sr e a lGt i m e p r e c i s e p o i n t p o s i t i o n i n g m e t h o d[J].B u l l e t i n o fS u r v e y i n g a n d M a p p i n g,2018(2):99G102,163(i nC h i n e s e).作者简介:徐伟证(1993-),男,硕士研究生,研究方向为导航增强㊁高精度定位数据处理,w z x u@n u a a.e d u.c n.康国华(1978-),男,教授,研究方向为微小卫星姿轨控㊁卫星导航与定位,k a n g g h@n u a a.e d u.c n.(编辑:邓薇)。
简介精密单点定位--precise point positioning(PPP)所谓的精密单点定位指的是利用全球若干地面跟踪站的GPS 观测数据计算出的精密卫星轨道和卫星钟差, 对单台GPS 接收机所采集的相位和伪距观测值进行定位解算。
利用这种预报的GPS 卫星的精密星历或事后的精密星历作为已知坐标起算数据; 同时利用某种方式得到的精密卫星钟差来替代用户GPS 定位观测值方程中的卫星钟差参数; 用户利用单台GPS 双频双码接收机的观测数据在数千万平方公里乃至全球范围内的任意位置都可以2- 4dm级的精度, 进行实时动态定位或2- 4cm级的精度进行较快速的静态定位, 精密单点定位技术是实现全球精密实时动态定位与导航的关键技术,也是GPS 定位方面的前沿研究方向。
编辑本段精密单点定位基本原理GPS 精密单点定位一般采用单台双频GPS 接收机, 利用IGS 提供的精密星历和卫星钟差,基于载波相位观测值进行的高精度定位。
所解算出来的坐标和使用的IGS 精密星历的坐标框架即ITRF 框架系列一致, 而不是常用的WGS- 84 坐标系统下的坐标,因此IGS 精密星历与GPS 广播星历所对应的参考框架不同。
编辑本段密单点定位的主要误差及其改正模型在精密单点定位中, 影响其定位结果的主要的误差包括:与卫星有关的误差(卫星钟差、卫星轨道误差、相对论效应);与接收机和测站有关的误差(接收机钟差、接收机天线相位误差、地球潮汐、地球自转等);与信号传播有关的误差(对流层延迟误差、电离层延迟误差和多路径效应)。
由于精密单点定位没有使用双差分观测值, 所有很多的误差没有消除或削弱,所以必须组成各项误差估计方程来消除粗差。
有两种方法来解决:a.对于可以精确模型化的误差,采用模型改正。
b.对于不可以精确模型化的误差,加入参数估计或者使用组合观测值。
如双频观测值组合,消除电离层延迟;不同类型观测值的组合,不但消除电离层延迟,也消除了卫星钟差、接收机钟差;不同类型的单频观测值之间的线性组合消除了伪距测量的噪声,当然观测时间要足够的长,才能保证精度。
精密单点定位PPP精密单点定位(precise point positioning ,缩写PPP ),指的是利用全球若干地面跟踪站的GPS 观测数据计算出的精密卫星轨道和卫星钟差, 对单台GPS 接收机所采集的相位和伪距观测值进行定位解算。
在卫星导航应用之中,GPS 作为定位的意义越来越重要,不论是军事上还是工程等方面上,导航定位的研究依然是一个不老的研究主题。
精密单点定位更是导航定位中的一个很值得研究的问题。
PPP 根本上讲属于单点定位范畴,那么单点定位又是怎样进行测量定位的呢?单点定位是利用卫星星历和一台接收机确定待定点在地固坐标系中绝对位置的方法,其优点:一台接收机单独定位,观测组织和实施方便,数据处理简单;缺点:精度主要受系统性偏差(卫星轨道、卫星钟差、大气传播延迟等)的影响,定位精度低。
应用领域:低精度导航、资源普查、军事等。
对于单点定位的几何描述,三个站星距离,作三个球面三个球面两两相交于两点,如下图所示:站星距离的测定:保持GPS 卫星钟同GPS 接收机钟同步;GPS 卫星和接收机同时产生相同的信号;采用相关技术获得信号传播时间;GPS 卫星钟和GPS 接收机钟难以保持严格同步,用相关技术获得的信号传播时间含有卫星钟和接收机钟同步误差的影响。
单点定位虽然是只需要一台接收机即可,但是单点定位的结果受卫星星历误差、卫星钟差以及卫星信号传播过程中的大气延迟误差的影响较为显著,故定位精度一般较差。
PPP 针对单点定位中的影响,采用了精密星历和精密卫星钟差、高精度的载波相位观测值以及较严密的数学模型的技术,如用户利用单台GPS 双频双码接收机的观测数据在数千万平方公里乃至全球范围内,点位平面位置精度可达1~3cm ,高程精度可达2~4cm ,实时定位的精度可达分米级。
精密单点定位的数学模型,对于伪距:222()()()S R i i i i ion trop t t x X y Y z Z V V c V c V ρ=-+-+--+⋅-⋅0()()()S R ii i i i t i ion i trop i i t V l dX m dY n dZ c V c V V V ρρ=---+⋅-⋅+---误差方程为:载波相位:利用上述推导的观测模型,即可采用卡尔曼滤波的方法或最小二乘法进行非差精密单点定位计算,在解算时,位置参数在静态情况下可以作为常未知数处理;在未发生周跳或修复周跳的情况下,整周未知数当作常数处理,在发生周跳的情况下,整周未知数当作一个新的常数参数进行处理;由于接收机钟较不稳定,且存在着明显的随机抖动,因此将接收机钟差参数当作白噪声处理;而对流层影响变化较为平缓,可以先利用Saastamonen 或其他模型改正,再利用随机游走的方法估计其残余影响。
实时精密单点定位(PPP)是可能通过实时卫星轨道和时钟校正的可用性广播星历,播放的实时校正(BCS)。
实时BCS是目前在全球以及区域的参考帧。
在这方面的贡献,PPP使用这些全球性和区域性BCS的性能分析1983北美基准(NAD83)。
为当前区域NAD83 BC 方法确定的局限性和协调的差异导致了与传统方法相比,显示全球BC。
虽然偏差所造成的不同的参考帧的使用被证明是亚厘米级,它也表明,他们可以通过PPP算法或区域BC方法改性降低或消除。
分析了三种不同的变体进行PPP,单一频率的电离层的自由变体,双频电离层自由变体,和一个单一频率的电离层修正变异。
精密单点定位(PPP)是一个全球定位系统(GPS)处理非差伪距和载波相位测量从一个独立的GPS接收机的高精度计算分米或厘米在全世界遍地开花的位置定位方法(藏伯格等人。
1997;2001 ovstedal库巴和荷鲁克斯;2002)。
近年来,服务已经开发了允许高精度星历数据可实时用户(代码2006;库巴泰特里等人2003。
2005烘烤2010)。
这样的情况了,并将继续创造,PPP应用范围广(荷鲁克斯等人。
2004、高2008;比斯纳)。
这种服务的重要例子是实时(RT)的GPS卫星的轨道和时钟校正广播星历(Sohne等人。
2008。
这些RT 广播改正(BCS)用户提供精确的轨道和时钟校正所需的PPP。
BCS在全球参考框架不仅可以(GRF)也在一组选定的区域参考框架(RRFS),如北美基准(NAD)1983(NAD83)(BKG 2010;Sohne 2010)。
在这方面的贡献,这些NAD83区域BCS使用(微构件系统)的单和双频率PPP是第一时间分析及其与更传统的全球BCS的使用性能(GBC上将)的比较。
在微构件系统的理论基础是认为当处理独立的GPS数据,获得用户的位置的参考框架定义的参考系统,实现了卫星位置。
因此,在文献中已GRF RRF卫星轨迹的转换是一个有用的替代GRF RRF的站坐标变换因为它有可能简化访问RRF允许用户在一个全局数据区域专门工作表明(克蕾默等人。
导航卫星实时精密钟差确定及实时精密单点定位理论方法研究一、本文概述随着全球导航卫星系统(GNSS)的快速发展和广泛应用,导航卫星实时精密钟差确定及实时精密单点定位(Real-Time Precise Point Positioning,RT-PPP)技术已成为现代大地测量和导航领域的研究热点。
这些技术不仅能够提供高精度、高可靠性的定位服务,还能有效支持各种实时应用场景,如智能交通、无人机导航、灾害监测等。
本文旨在深入研究导航卫星实时精密钟差确定及实时精密单点定位的理论方法,为提高定位精度和效率提供理论支持和技术指导。
本文首先介绍了导航卫星系统的基本原理和实时精密钟差确定的重要性,阐述了钟差对定位精度的影响以及实时钟差确定的必要性。
接着,详细分析了实时精密钟差确定的主要方法和技术,包括卫星钟差建模、钟差估计方法、数据融合处理等方面。
在此基础上,本文进一步探讨了实时精密单点定位的理论框架和关键技术,包括观测方程建立、误差处理、参数估计等方面。
本文的研究不仅对提高导航卫星系统的定位精度和实时性具有重要意义,也为相关领域的技术创新和应用拓展提供了有益的参考和借鉴。
通过本文的研究,我们希望能够为导航卫星实时精密钟差确定及实时精密单点定位技术的发展和应用提供理论支撑和技术指导。
二、导航卫星实时精密钟差确定方法导航卫星的实时精密钟差确定是卫星导航系统中的重要环节,对于提高定位精度和可靠性具有关键作用。
随着技术的不断发展,对于卫星钟差的确定方法也在不断进步。
本文将对导航卫星实时精密钟差确定方法进行深入研究和分析。
钟差模型是描述卫星钟差随时间变化的数学模型。
通常,钟差模型可以采用多项式或时间序列模型进行拟合。
在实时精密钟差确定中,需要利用观测数据对钟差模型中的参数进行估计。
常用的参数估计方法有最小二乘法和卡尔曼滤波等。
为了确定卫星的实时精密钟差,需要利用地面接收站观测到的导航卫星信号数据。
这些观测数据包括伪距、载波相位等。
顾及实时位置预测信息的动态精密单点定位算法杜源;黄观文;涂锐;王利;王进【摘要】In the traditional mode,kinematic precise point positioning (PPP) technique uses the kinematic sequential least squares algorithm to carry on the epoch recurrence solution.However,because of coordinate parameter's temporal characteristics,the epoch is not inherited,which makes the kinematic PPP algorithm losea priori position information constraints.Aiming at this problem,this paper discusses a kinematic precise point position algorithm which takes real-time position prediction information into account.It uses prediction residual information to determine the adaptive factor of each coordinate component.We analyze the positioning accuracy and the correlation with the sampling interval.Finally,the numerical simulation results show that the proposed method effectively improves the accuracy of high-frequency dynamic data processing,which has application value for the monitoring of slow deformation.%传统模式下动态精密单点定位(precise point positioning,PPP)技术可利用动态序贯最小二乘算法进行历元递推求解,坐标参数因其时变特性,历元间不进行继承,使得动态PPP算法损失了先验位置信息的约束条件.针对该问题,提出一种顾及实时位置预测信息的动态精密单点定位算法,通过预测残差信息确定各坐标分量的自适应因子,并分析该方法的定位精度以及与采样间隔的相关性;最后利用位移平台开展形变模拟实验.数值算例结果显示,该方法能有效改善高频动态数据处理的精度,对无基准站支持下的缓变型形变监测具有一定的应用价值.【期刊名称】《大地测量与地球动力学》【年(卷),期】2018(038)004【总页数】5页(P394-398)【关键词】PPP;实时位置预测信息;自适应因子;缓变型形变【作者】杜源;黄观文;涂锐;王利;王进【作者单位】长安大学地质工程与测绘学院,西安市雁塔路126号,710054;长安大学地质工程与测绘学院,西安市雁塔路126号,710054;中国科学院国家授时中心,西安市书院东路3号,710600;长安大学地质工程与测绘学院,西安市雁塔路126号,710054;长安大学地质工程与测绘学院,西安市雁塔路126号,710054【正文语种】中文【中图分类】P228目前实时动态PPP的解算策略主要采用序贯最小二乘与Kalman滤波两种算法。
实时精密单点定位(PPP)是可能通过实时卫星轨道和时钟校正的可用性广播星历,播放的实时校正(BCS)。
实时BCS是目前在全球以及区域的参考帧。
在这方面的贡献,PPP使用这些全球性和区域性BCS的性能分析1983北美基准(NAD83)。
为当前区域NAD83 BC 方法确定的局限性和协调的差异导致了与传统方法相比,显示全球BC。
虽然偏差所造成的不同的参考帧的使用被证明是亚厘米级,它也表明,他们可以通过PPP算法或区域BC方法改性降低或消除。
分析了三种不同的变体进行PPP,单一频率的电离层的自由变体,双频电离层自由变体,和一个单一频率的电离层修正变异。
精密单点定位(PPP)是一个全球定位系统(GPS)处理非差伪距和载波相位测量从一个独立的GPS接收机的高精度计算分米或厘米在全世界遍地开花的位置定位方法(藏伯格等人。
1997;2001 ovstedal库巴和荷鲁克斯;2002)。
近年来,服务已经开发了允许高精度星历数据可实时用户(代码2006;库巴泰特里等人2003。
2005烘烤2010)。
这样的情况了,并将继续创造,PPP应用范围广(荷鲁克斯等人。
2004、高2008;比斯纳)。
这种服务的重要例子是实时(RT)的GPS卫星的轨道和时钟校正广播星历(Sohne等人。
2008。
这些RT 广播改正(BCS)用户提供精确的轨道和时钟校正所需的PPP。
BCS在全球参考框架不仅可以(GRF)也在一组选定的区域参考框架(RRFS),如北美基准(NAD)1983(NAD83)(BKG 2010;Sohne 2010)。
在这方面的贡献,这些NAD83区域BCS使用(微构件系统)的单和双频率PPP是第一时间分析及其与更传统的全球BCS的使用性能(GBC上将)的比较。
在微构件系统的理论基础是认为当处理独立的GPS数据,获得用户的位置的参考框架定义的参考系统,实现了卫星位置。
因此,在文献中已GRF RRF卫星轨迹的转换是一个有用的替代GRF RRF的站坐标变换因为它有可能简化访问RRF允许用户在一个全局数据区域专门工作表明(克蕾默等人。
2000;库巴2002;克蕾默2006;Schwarz 1989)。
本文的组织如下。
能够评估作用的参考帧播放的PPP,NAD83简要描述和国际地球参考框架(ITRF),和他们的椭球坐标的差异,在随后的部分了。
然后,GBC和红细胞的方法,单和双频率NAD83 PPP协议的分析和比较。
目前的RBC 方法确定的局限性和协调的差异导致他们对GBC的方法示出。
其次,它是如何修改PPP算法或红细胞的方法,这两种方法之间的一致性恢复。
由于确定的PPP RBC方法的局限性是固有的作为一个结果,不同的参考帧的使用,这方面的贡献的结果是在更换NAD83 2018提供了一个新的几何数据,删除不同意ITRF计划的支持(NOAA 2008)。
对PPP的BCS是理解中的重要作用的正确使用的参考帧播放。
因此,本节中的ITRF转换NAD83,其链接,这种改造在位置相关的椭球坐标的两帧之间的差异的影响作了简要的介绍。
北美基准1983所采用的数据和参考在美国和加拿大的空间定位系统是NAD83。
详细的介绍了它的定义,建立,和进化,读者可以参考施瓦茨(1989),斯奈和索勒(2000a,b),索勒和斯奈(2004),克雷默等人。
(2000),与克雷默(2006)。
NAD83首次实现的,这在很大程度上依赖卫星多普勒观测,由美国国家大地测量1986通过(NGS)。
它被称为NAD83(1986)。
自那时以来,NAD经历了又一个五实现在美国,最后一个是NAD83(cors96)。
此实现,正是联系在一起的NAD83 ITRF框架,它是一个地心坐标系统的最佳实现(鲍彻和altamimi 1996)。
为了这个目的,NGS和加拿大自然资源部(NRCan)从12个选定的甚长基线干涉测量的位置坐标转换参数的确定itrf96-nad83(VLBI)在两帧站。
建立NAD83(cors96)实现,估计itrf96-nad83变换随后被用于计算所有现有的GPS CORS NAD83坐标。
在分析CORS数据和最近的变化的参照系中,国际GPS服务(IGS)给出的产品(igs08代替IGS05,自2011年4月17日;IGS05和igs08是IGS实现itrf05和itrf08)(rebischung等人。
2011),和最近发布一个更新的实现NAD83,NAD83(2011)(NOAA 2011)。
的起源,定义表,和旋转NAD83(2011)仍然是NAD83相同(cors96);然而,如一个较长的GPS 时间序列因素,改进igs08 GRF,更好的处理算法已经导致了CORS的网站提高NAD83坐标。
在其第一个实现的时候,NAD83是地心系统是随着时间的其他地心系统兼容,如世界大地测量系统1984的原始实现(WGS84)。
然而,由于更精确的技术的使用,它是已知的,是NAD83约2米从地心抵消(见表1)。
与ITRF消除异议,NGS计划取代NAD83与一个新的几何数据2018(NOAA 2008)。
访问这些数据的主要手段,将全球导航卫星系统(GNSS)技术。
新的几何数据将在一个新的重力数据一起定义。
然而,目前还不知道是否有新的几何数据将被固定在稳定的北美洲板块。
新的几何数据的精确定义将在多年来通过一系列利益相关者的反馈论坛(NOAA 2008)。
相对于NAD83,它是这样定义的所有点的北美洲板块位于从板块边界带足够远,平均而言,零水平速度,ITRF(altamimi等人。
2007)是动态的,它的坐标变化主要考虑构造过程。
负责维持ITRF组织是国际地球自转和参考系服务(IERS)。
从itrf96-nad83变换的引入,几个新的ITRF实现由IERS介绍。
由于可用的RT NAD83红细胞是基于itrf2005-to-nad83变换(BKG 2010),随后的分析将基于此变换以及。
在一个时代的itrf-to-nad83坐标变换的一七参数相似变换进行如下(索勒和马歇尔2003;索勒和斯奈2004):xnad83(t)= S(t)R(t)xitrf(T)+ D(T)(1)在哪儿S(t)= [ 1 +ΔS(t)] R(t)= [ 1−RZ(T)RY(T)归零(T)1−RX(T)−RY(T)接收(T)1 ] D(t)= [ DX(T),Dy(T),DZ(t)] T在xitrf =坐标向量在全球ITRF框架;xnad83 =坐标向量在区域NAD83框架;S =刻度因子的增量 Δ;r矩阵微分旋转角度的RX,RY,和RZ码;和d =平移向量。
因为七个转换参数是随时间线性变化,变换(1)可以计算任何时代的T一旦七相似变换参数[(T0),R(T0),D(T0)],再加上他们的七次变化率(S˙˙,R,D˙),在一定的参考时间t0时刻了。
这14个参数,然后用于计算七相似变换参数的任何时代的TS(t)= S(T0)+˙(T−T0)R(t)= R(T0)+ R˙(T−T0)d(t)= D(T0)+ D˙(T−T0)(2)NGS采用这14个参数的值在表1中给出两个itrf2005-to-nad83(cors96)采用皮尔森等人的转化[。
(2010)和克雷默(2006)]和igs08-to-nad83(2011)采用NOAA转型[(2011)]。
比较大的旋转速率是由于北美板块的旋转和固定到北美板块NAD83。
式的旋转矩阵(1)和表1中相应的条目根据IERS约定(小和luzum 2010)。
使用的定义是相同的在克蕾默(2006);然而,不同的定义是使用在皮尔森等人。
(2010),结果在一个变化的旋转参数及其率的标志。
从表1可以看出,itrf2005-to-nad83之间变换参数的差异(cors96)变换和igs08-to-nad83(2011)变换是小;最大的区别是在规模。
在计算NAD83(cors96)是因为它是相同的实现,BCS 是可用的。
然而,NAD83(2011)被列入分析的结论以及。
规模效应,旋转,平移的itrf-nad83变换位置影响的坐标将不同位置的位置。
对PPP模式分析的目的,此位置依赖效应在椭球坐标系进行评估。
从式(1)和写作X而不是xitrf,产量与S = 1 +ΔS,R =我+ΔR,当忽略第二和更高阶的条款xnad83 =(1 +ΔS)(I +ΔR)x + D = x +ΔSX +ΔRX + D(3)因此Δxnad83 = xnad83-xΔxnad83 =Δ的x + R×x + D(4)在矢量产品形式ΔRx = R×X,R = [ RX,RY,RZ ] T.制定的表达(4)在椭球坐标系ϕ,λ条款,和H以下方程:[某] = [(N + H)因为ϕCOSλ(N + H)因为ϕ罪λ[N(1−E2)+ H]罪ϕ](5)其中n =曲率半径和偏心距e =东西。
线性化,然后逆变式(5)给出了【ΔH(M + H)Δϕ(N + H)因为ϕΔλ] = R(ϕ,λ)[ΔX Y ZΔΔ](6)正交矩阵R(ϕ,λ)= [因为ϕCOSλCOSϕ罪罪罪λϕ−ϕCOSλ−罪罪罪ϕλCOSϕ−λCOSλ0 ](7)其中m =南北的曲率半径。
替代式(4)代入式(6)最后给了【ΔH(M + H)Δϕ(N + H)因为ϕΔλ] = R(ϕ,λ)[ΔSX +ΔRX + D ] =Δ苏+ω×U +δ(8)其中u = R(ϕ,λ)X,ω= R(ϕ,λ)R,和δ= R(ϕ,λ)D.表达(8)显示了如何nad83-itrf北东(n-e-u)坐标的微分尺度差异的影响Δ,差动旋转ω×,和翻译δ。
与北美数字地形模型(巴伏利斯等人。
2006),这些坐标值的差异和变异是以图形方式显示在图1美国大陆。
横坐标的差异,可为几米一样大,通过平移和旋转驱动(规模效应在小于1毫米)。
高度的差异范围从−0.25米至1.65米的西北东南。
由于旋转和尺度的联合效应可以在这里显示在几毫米的水平是唯一的,高度的差异主要是由于对NAD83的nongeocentricity;即,式中的翻译δ(8)。
传统上,从ITRF到NAD83转型是应用在用户级[见图2(a)]。
在这GBC的方法,精确的轨道和时钟[盒1在图2(a)]被用来生成GBC上将(框3)的广播星历(框2)。
PPP 算法(框4)使用这些全球商业通信系统和广播星历和GPS观测(框5)来计算一个精确的接收器位置的框架(框6)。
一个itrf-to-nad83坐标变换(框7)最后应用获得NAD83接收器的位置(框8)。
红细胞的方法描绘在图2(b)。
从普通法的主要区别是,与红细胞的方法,该itrf-to-nad83改造已由服务器计算BCS而不是由个人用户进行。