七自由度机器人运动学分析
- 格式:pdf
- 大小:139.00 KB
- 文档页数:3
摘要机器人技术已成为高技术领域内具有代表性的战略性技术之一,它使得传统的工业生产面貌发生巨大的变化,对社会的发展产生深远影响。
机器人运动学是机器人技术重要的组成部分,机器人运动学逆问题的求解是机器人轨迹规划、位置控制和离线编程的主要步骤之一。
本文主要介绍了我国工业机器人的发展以及工业机器人运动学的研究现状,对位姿变换、坐标变换等运动学分析的基础知识进行了简单的描述。
本文通过对Motoman-V A1400型七自由度机器人的结构分析,利用D-H方法建立机器人坐标系简图,确定各关节连杆参数,并在运动学正解的基础上,利用反变换矩阵的方法进行了运动学逆解的计算。
本文简单介绍了虚拟样机技术的概念和应用,虚拟样机技术平台ADAMS软件及其基本模块。
本文最后利用UG对机器人进行三维建模,并导入ADAMS中进行逆运动学的分析及仿真,在已知末端轨迹的情况下,绘出各关节的运动状态曲线,得到仿真结果。
机器人逆运动学研究所取得的任何突破性的进展都将对机器人技术产生重要的影响。
关键词:七自由度,逆运动学,仿真ABSTRACTRobotic technology has become one of representative strategic technology in high-tech field. It makes the traditional industrial production have undergone tremendous changes and have a profound impact on social development. Kinematics is an important part of robotics, and the solution of the robot inverse kinematics is one of the main steps of robot trajectory planning, position control and off-line programming.This article introduces the development of industrial robots and industrial robots research of kinematics, and gives a simple description on the position and orientation transformation, coordinate transformation, kinematics analysis and other basic knowledge. This article analyses the structure of the seven degrees of freedom robot Motoman-V A1400, then establishes the robot coordinate system diagram by D-H method to determine the link parameters of each joint, and the calculations of inverse kinematics by inverse transform matrix method on the basis of kinematics. Then, the article briefly introduces the concept of virtual prototyping technology and applications, virtual prototyping platform, ADAMS, and its basic modules. Finally, the robot using 3D modeling of UG, and in the case of the known end of the track, analyses and simulates the inverse kinematics into ADAMS, draw the simulation results that the state of motion of each joint curves.The progress achieved any breakthrough of inverse kinematics will have a major impact on robotics technology.Key Word: 7 DOF, inverse kinematics, simulation目录摘 要 (I)ABSTRACT (II)第一章 绪论 (1)1.1 工业机器人的发展 (1)1.2 工业机器人运动学研究现状 (2)1.3 虚拟样机技术的应用 (3)1.4 课题来源及选题意义 (4)1.5 本文的主要研究内容 (6)第二章 机器人空间描述与坐标变换矩阵 (7)2.1 MOTOMAN-VA1400机器人简介 (7)2.2 MOTOMAN-VA1400机器人空间描述 (8)2.2.1 机器人坐标系的建立 (8)2.2.2 机器人连杆参数的确定 (10)2.3 MOTOMAN-VA1400机器人坐标变换矩阵 (11)2.3.1 机器人齐次坐标变换 (11)2.3.2 机器人坐标变换矩阵的求解 (12)2.4 本章小结 (15)第三章 机器人逆运动学求解 (17)3.1 逆运动学求解方案的选择 (17)3.2 逆运动学方程最优解的选取 (17)3.3 逆运动学方程的求解过程 (18)3.4 逆运动学求解结果 (21)3.5 本章小结 (25)第四章运动学仿真与分析 (26)4.1 ADAMS基本模块简介 (26)4.2 ADAMS模型仿真 (27)4.2.1 机器人的几何建模 (27)4.2.2 ADAMS环境下生成虚拟样机 (29)4.2.3 样机的约束添加和参数设置 (29)4.2.4 仿真与结果的输出 (32)4.3 仿真结果分析 (34)4.4 本章小结 (36)第五章结论与展望 (37)5.1 结论 (37)5.2 技术经济分析 (37)5.2.1 技术可行性分析 (37)5.2.2 经济优越性分析 (37)5.3 对进一步研究的展望 (38)参考文献 (39)致谢 (41)附录 (42)第一章绪论1.1 工业机器人的发展机器人是一种可编程,通用,有操作和移动能力的自动化机械。
七自由度柔性机械臂机构说明设计目标由于人工成本的不断提升,人们的刚性需求也不断的扩大,生产自动化越来越被人们所重视。
也是社会发展的必然。
让机器人去完成一些高危、肮脏、重复、精度高的工作。
由此,设计一款高精度,高灵活性的机器臂显得更为重要。
设计的目标:高精度仿人工业机器人。
运用先进的仿生理论与柔性设计为基础,设计开发用二次式运动反馈来实现其高精度控制,合理的仿人机构来完成动动。
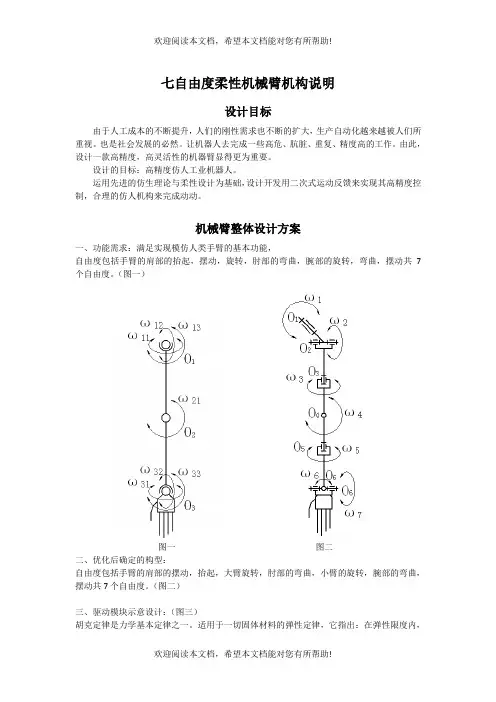
机械臂整体设计方案一、功能需求:满足实现模仿人类手臂的基本功能,自由度包括手臂的肩部的抬起,摆动,旋转,肘部的弯曲,腕部的旋转,弯曲,摆动共7个自由度。
(图一)图一图二二、优化后确定的构型:自由度包括手臂的肩部的摆动,抬起,大臂旋转,肘部的弯曲,小臂的旋转,腕部的弯曲,摆动共7个自由度。
(图二)三、驱动模块示意设计:(图三)胡克定律是力学基本定律之一。
适用于一切固体材料的弹性定律,它指出:在弹性限度内,物体的形变跟引起形变的外力成正比。
这样增加了力的反馈测量。
在弹性材料在弹性限度内形变时,测得其形变量,从而计算出受力与关节下方所处的位置。
1.先进行测试图三四、机械臂的具体设计方案,(图四)五、各关节的受力分析:基本尺寸图(图五)图五L1=426mm,L2=293mm,L3=108mm,L4=442mm。
六、马达的初选谐波减速器的优点:Harmonic减速器结构简单,体积小,重量轻、啮合的齿数多、承载能力大、运动精度高、运动平稳、间隙可以调整、传动效率高、同轴性好、可实现向密闭空间传递运动及动力。
瑞士Maxon电机优点:轴向窜动和径向跳动小、温度范围大、回差小等,并且电机型号全编码器与抱闸与控制器配套全面。
瑞士Maxon电机与日本Harmonic谐波减速器选型需求示例图片:图六马达1:EC90flat 90W扭力:4.67 nm 0.387nm;转速:3190rpm;重量:648g减速器1:CSG-25-160 减速比:1:160;最大扭力:314nm;正常:176nm;重量:420g马达2:EC-4pole max30 200W 扭力:3.18 nm 0.112nm;转速:17000rpm;重量:300g减速器2:CSG-25-160 减速比:1:160;最大扭力:314nm;正常:176nm;重量:420g马达3:EC max40 170W 扭力:2.66nm0.16nm;转速:9840rpm;重量:580g减速器3:CSG-17-120 减速比:1:120;扭力最大:112nm;正常:70nm;重量:150g马达4:EC45flat 70W 扭力:0.82nm0.13nm;转速:4840rpm;重量:110g减速器4:CSG-20-160 减速比:1:160;最大扭力:191nm;正常:120nm;重量:280g马达5:EC-4pole max30 100W 扭力:1.24nm 0.0 63nm;转速:17800rpm;重量:210g减速器5:CSD SHD-17-100 减速比:1:100;最大扭力:71nm;正常:37nm;重量:100g 马达6:EC45flat 70W 扭力:0.13 nm 0.17nm;转速:4840rpm重量:110g减速器6:CSF-11-100 减速比:1:100;最大扭力:25nm;正常:11nm;重量:50g马达7:EC-4pole max30 100W 扭力:1.24nm 0.0 63nm;转速:17800rpm;重量:210g减速器7:CSF-11-100 最大扭力:25nm;正常:11nm;重量:50g说明:EC45flat 70W要更换为EC-I40 70W+MR七、受力分析:有效扭力计算公式:(堵转-连续)*0.3+连续质量分配:设大臂小臂均为,外径D=110mm,假设主体为外壁壁厚为L=5mm的铝壳,长度为H=250mm,则体积为:412cm3,铝的密度2.7g/cm3,外壳质量为1.1kg大臂部分质量有马达3(580g)减速器(150g),外壳(1.1kg);小臂部分有马达4567(110g,210g,110g,210g),减速器4567(280g,100g,50g,50g),外壳(1.1kg);手部主要是灵巧手的质量设为1kg;外加假设载荷6kg。
七自由度机械臂逆解方案设计
七自由度机械臂逆解方案设计是指在已知机械臂末端位置和姿态的情况下,求解出机械臂各关节的角度,从而实现机械臂的运动。
以下是一种常用的七自由度机械臂逆解方案设计的步骤:
1. 机械臂建模:确定机械臂的结构和参数,包括关节类型(如旋转关节、滑动关节等)、关节长度和转动轴的方向。
2. 坐标系设定:确定机械臂的坐标系,包括基座的坐标系和末端执行器的坐标系。
通常选择一个固定的参考坐标系作为基座坐标系,然后依次定义各关节坐标系和末端执行器坐标系。
3. 正运动学求解:根据机械臂的结构和参数,使用正运动学方程求解出末端执行器的位置和姿态。
正运动学方程将末端执行器的坐标表示为各关节角度的函数。
4. 逆运动学求解:根据末端执行器的位置和姿态,使用逆运动学方程求解出机械臂的关节角度。
逆运动学方程将关节角度表示为末端执行器的位置和姿态的函数。
5. 解的求解:使用数值方法求解逆运动学方程的解。
由于逆运动学方程往往是非线性的,一般使用数值迭代方法(如牛顿法)求解。
6. 解的优化:对求解得到的关节角度进行优化,以满足机械臂
运动的限制条件,如关节角度限制、关节速度限制等。
7. 控制指令生成:将求解得到的关节角度转化为机械臂的控制指令,发送给机械臂控制系统,实现机械臂的运动。
8. 可视化和验证:将求解得到的关节角度应用到机械臂模型中,进行可视化和验证,确保逆解方案设计的正确性。
以上是一种常用的七自由度机械臂逆解方案设计的步骤,具体的设计过程还需要根据具体的机械臂结构和要求进行调整和优化。
多自由度串联机器人运动学分析与仿真共3篇多自由度串联机器人运动学分析与仿真1多自由度串联机器人运动学分析与仿真随着工业技术的不断发展和普及,机器人系统已经被广泛应用于各个领域,如汽车工业、制造业等。
机器人系统的控制和运动学分析是实现机器人精确控制和操作的重要基础。
本文将介绍多自由度串联机器人的运动学分析以及仿真。
1. 多自由度串联机器人多自由度机器人是指由多个自由度组成的机器人,可以进行更加复杂的操作。
串联机器人是指机器人的多个部分按照一定的顺序连在一起构成的机器人。
多自由度串联机器人是指由多个自由度组成,并且这些自由度按照一定的顺序连在一起构成的机器人。
例如,可以将多个关节连接起来构成一个多自由度关节机器人。
多自由度串联机器人在制造和物流业非常常见。
2. 运动学分析运动学分析是机器人系统控制中非常重要的一部分。
它描述了机器人如何移动和定位,以及如何控制机器人的各个部分进行精确的运动。
运动学分析主要解决以下几个问题:(1) 机器人姿态分析问题。
机器人姿态分析主要是描述机器人末端执行器的空间位置和末端姿态。
(2) 机器人关节角度分析问题。
机器人关节角度分析是指计算机器人各个关节的角度,以确定机器人的运动轨迹。
(3) 机器人轨迹分析问题。
机器人轨迹分析是对机器人运动轨迹进行精确计算和控制,以达到所需的操作目标。
3. 串联机器人的运动学分析多自由度串联机器人的运动学分析可以分为直接运动学和逆运动学两个部分。
(1) 直接运动学直接运动学是一种基于机器人各关节的运动学参数计算出机器人末端执行器姿态和位置的方法。
其公式如下:T_n = T_1 * T_2 * … * T_n-1其中,T_n表示机器人从末端执行器到机器人基座的坐标变换矩阵;T_i表示机器人第i个关节的变换矩阵。
(2) 逆运动学逆运动学是通过机器人末端执行器的姿态和位置计算机器人各关节的角度的方法。
逆运动学公式如下:T_n = T_base * T_tool其中,T_base表示机器人基座的坐标变换矩阵;T_tool表示机器人末端执行器的变换矩阵。

七自由度机械臂逆运动学引言:机械臂是一种重要的工业自动化设备,在许多领域中发挥着重要的作用。
为了实现机械臂的精确控制,我们需要了解机械臂的逆运动学。
本文将介绍七自由度机械臂的逆运动学问题,并探讨其解决方法。
一、机械臂的七自由度七自由度机械臂是指具有七个独立自由度的机械臂。
这意味着机械臂可以在七个不同的方向上进行运动,包括三个平移自由度和四个旋转自由度。
平移自由度使机械臂能够在三维空间中进行定位,而旋转自由度则使机械臂能够在各个方向上进行转动。
二、逆运动学问题的定义逆运动学问题是指已知机械臂的末端位置和姿态,求解机械臂各个关节角度的问题。
通过解决逆运动学问题,我们可以实现对机械臂的精确控制,使其能够达到预定位置和姿态。
三、逆运动学问题的求解方法1. 几何方法几何方法是最常用的求解逆运动学问题的方法之一。
它基于机械臂的几何特性和坐标变换原理,通过解析几何方法求解机械臂的关节角度。
这种方法的优点是简单直观,容易理解和实现。
然而,对于复杂的机械臂结构和运动学模型,几何方法可能会导致复杂的数学计算和多解性问题。
2. 数值方法数值方法是一种基于数值计算的求解逆运动学问题的方法。
它通过迭代计算的方式逼近机械臂的关节角度,直到满足末端位置和姿态的要求。
数值方法的优点是适用于各种复杂的机械臂结构和运动学模型,可以得到较为精确的解。
然而,数值方法的计算量较大,可能需要较长的计算时间。
四、七自由度机械臂逆运动学问题的求解对于七自由度机械臂的逆运动学问题,可以采用几何方法或数值方法进行求解。
其中,几何方法可以通过解析几何的方式求解机械臂的关节角度,而数值方法则可以通过迭代计算的方式逼近机械臂的关节角度。
在具体求解过程中,需要根据机械臂的运动学模型和几何特性建立逆运动学模型。
然后,通过解析几何或数值计算的方法求解机械臂的关节角度。
最后,通过控制器将计算得到的关节角度发送给机械臂,实现对机械臂的精确控制。
五、总结七自由度机械臂的逆运动学是机械臂控制中的重要问题。
基于MATLAB 的七自由度机器人运动学及工作空间仿真徐小龙;高锦宏;王殿君;张立平【摘要】On the basis of the full investigation of advanced welding robot configuration design,designed a 7-DOF weld-ing robot based on UG three-dimensional modeling.The forward equation of kinematics was built based on the D-H matrix according to the body structure and motion features of 7-DOF welding robots.The workspace of manipulator was analyzed by numerical methods for random sampling.The cloud picture was completed based on MATLAB.Simulation results showed that the experimental results indicated that by using numerical methods for random sampling the analysis of weld ro-bot workspace changed smoothly without impact,which confirmed the reasonableness of structural design,and provided the basis for optimal design of robot control system and structural design of the latter.%在充分调研国内外先进机器人构型设计的基础上,设计出一种基于UG三维建模的七自由度机器人。

基于遗传算法的七自由度机器人轨迹规划马丹妮;李传江;张自强【摘要】针对七自由度串联机器人Robai Cyton Gamma 300轨迹规划问题,采用改进遗传算法规划机器人各关节的运动轨迹.利用D-H表示法建立起机器人末端执行器的位姿与参考坐标系之间的齐次变换矩阵,采用遗传算法优化BP神经网络求解机器人的运动学求逆解.利用5次B样条曲线在关节空间构造机器人各关节随时间变化的运动轨迹.在满足运动学约束条件下,对传统遗传算法在编码方式、遗传算子、交叉概率和变异概率等方面进行改进,对机器人各关节运动轨迹进行时间最优规划.运用Matlab对研究进行了仿真实验.结果表明,经改进遗传算法优化后的机器人运动轨迹时间明显缩短,各关节的角速度、加速度和加加速度曲线连续无突变,从而验证了该方法的有效性.【期刊名称】《实验室研究与探索》【年(卷),期】2016(035)009【总页数】5页(P33-37)【关键词】遗传算法;Robai Cyton Gamma 300机器人;Bezier曲线;轨迹优化【作者】马丹妮;李传江;张自强【作者单位】广东省电信规划设计院有限公司,广东广州528000;上海师范大学信息机电学院,上海201418;上海师范大学信息机电学院,上海201418【正文语种】中文【中图分类】TP273机器人轨迹规划是指机器人运动过程中的运动轨迹,即运动时各关节的位移、速度、加速度随时间变化的曲线[1-2]。
机器人的轨迹规划是机器人控制的基础,近年来是机器人领域的研究热点。
轨迹规划的性能指标有很多种,主要分为:时间最优轨迹规划[3]、能量最优轨迹规划[4]、冲击最优轨迹规划[5]以及混合最优轨迹规划[6]。
其中,时间最优轨迹规划对提高机器人工作效率有重要意义,也一直是机器人轨迹规划研究的重点。
国内外针对机器人的时间最优轨迹规划提出了许多不同的规划方法,主要有二次规划法[7]、动态目标规划法[8]、PID控制法[9]、迭代法[10]等。
基金项目:山西省自然科学基金项目(201801D121183)ꎻ山西省重点研发计划项目(201803D421028ꎻ201903D421051)第一作者简介:李冠琦(1996 )ꎬ男ꎬ山西吕梁人ꎬ硕士研究生ꎬ研究方向为康复机器人机构ꎮDOI:10.19344/j.cnki.issn1671-5276.2022.01.027基于旋量理论的7自由度机械臂运动学建模与分析李冠琦ꎬ武建德ꎬ李瑞琴(中北大学机械工程学院ꎬ山西太原030051)摘㊀要:机械臂模仿人手臂的7自由度会拥有冗余自由度ꎮ基于旋量理论计算7自由度机械臂的正向运动学解ꎬ从数值上验证矩阵指数先分块展开比直接泰勒展开准确ꎮ用Newton-Raphson数值迭代法求逆解ꎮ通过编写Matlab程序对正逆解互相验证ꎮ研究发现逆解的求解有适用范围ꎬ较之传统的D-H法ꎬ使用0螺距的螺旋轴ꎬ会使建模更加简洁ꎮ关键词:旋量ꎻ机械臂ꎻNewton-Raphson数值迭代法中图分类号:TP241㊀㊀文献标志码:A㊀㊀文章编号:1671 ̄5276(2022)01 ̄0105 ̄03KinematicsModelingandAnalysisofSeven-degree-freedomRoboticArmBasedonSpinorTheoryLIGuanqiꎬWUJiandeꎬLIRuiqin(InstituteofMechanicalEngineeringꎬNorthUniversityofChinaꎬTaiyuan030051ꎬChina)Abstract:Theroboticarmmimickingthe7DOFofthehumanarmwillhaveredundantdegreesoffreedom.Theforwardkinematicsolutionoftheseven-DOFroboticarmiscalculatedbasedonthespinortheoryꎬanditisverifiednumericallythatthematrixexponentialfirstblockexpansionismoreaccuratethanthedirectTaylorexpansion.TheNewton-Raphsonnumericaliterationmethodisusedtofindtheinversesolution.Theforwardandinversesolutionsareverifiedagainsteachotherbywritingamatlabprogram.Itisfoundthatthereisarangeofapplicabilityfortheinversesolutionꎬandtheuseofa0-pitchspiralaxisresultsinamoreconcisemodelingthanthetraditionalD-Hmethod.Keywords:spinortheoryꎻroboticarmꎻNewton-Raphsonnumericaliterativemethod0㊀引言机械臂是机器人技术领域中应用最为广泛的自动化装置ꎬ在工业制造㊁医疗康复等领域都有其应用实例ꎬ拟人化机械臂技术也逐渐成熟[1-4]ꎮ匹兹堡大学生物医学团队在BCI机械臂假肢里引入实时触觉反馈ꎬ使完成任务的时间减少一半ꎮ波士顿动力开发Stretch移动式7R机械臂已应用于仓库运输ꎮ20世纪80年代学者们开始讨论将旋转轴从数学中引入机器人研究的可行性ꎬ旋量理论[5-9]日益成熟ꎬ然而对其的应用介绍却鲜见报道ꎮ本文建模7自由度串联机械臂ꎬ着重对螺旋轴这一单位矢量在运动学的应用加以详细描述ꎮ6自由度逆解有通用公式ꎬ7R逆解包含32个实根ꎬ出现虚空间或自运动歧ꎮ7R逆解可结合Newton-Raphson数值迭代法求解[10]ꎮ使用Matlab进行正解中的化简与直接展开等运算过程的比较ꎬ并且同时使用开源Python对结果进行比较ꎮ使用基于空间(space简称s)坐标系的空间雅可比矩阵ꎬ找出数值迭代法求逆解的适用范围ꎬ基于正解的前提下ꎬ验证逆解的准确性ꎮ1㊀旋量理论螺旋(旋量 旋转向量)理论在正运动学中的应用ꎮ1.1㊀M矩阵(0位置㊁起始位置)M矩阵为当所有的关节转角都为0的时候ꎬ操作空间坐标系(body简称b)在s坐标系中的位置和姿态矩阵ꎮ1.2㊀旋转向量Sң与指数积公式将每一个转动关节视为0螺距的轴ꎬ假设除了最后一个关节转动θʎ外ꎬ其他关节都是固定的ꎮ在s坐标系里ꎬ关节7上螺旋轴的向量形式如式(1)所示ꎬ在高维度上ꎬRn是n维的欧几里得空间ꎬS7ңɪR6㊁ω7ңɪR3ꎬV7ңɪR3ꎮ螺旋轴的矩阵形式S7如式(2)所示ꎮS7ң=ωң7Vң7éëêêùûúú(1)S7=ω7Vң700éëêêùûúú(2)T07=eS7θ7M(3)501 博看网 . All Rights Reserved.特殊正交群是所有有效的3ˑ3旋转矩阵的集合群SO(3):包括R㊁ω㊁eωθꎮ特殊的欧几里得集合群或刚体运动群或R3中的同质变换矩阵Se(3)表示位姿:包括M㊁eSθ㊁T07ꎮeSθ=I+Sθ+S2θ22!+S3θ33!+ =eωθf(θ)ν01éëêêùûúú(4)式(4)中ꎬ可利用特性ω3=-ω来化简ꎬ且eωθ有Rodrigues公式:f(θ)=Iθ+(1-cosθ)ω+(θ-sinθ)ω2(5)eωθ=I+sinθω+(1-cosθ)ω2(6)依次解锁一个角度ꎬ往前代值ꎬ得到T07=eS1θ1 eS7θ7M(7)2㊀数值法逆解使用非线性寻根的Newton-Raphson方法ꎬ有寻根㊁不存在根时寻找近似解㊁存在多个解时寻找最优解的优势ꎮ给定一个初始值ꎬ然后代入迭代式求解直到出现误差范围内的解ꎮ设正向运动学函数为f(θd)ꎬ末端执行器的位置向量为νꎬ非线性寻根Newton-Raphson是找到目标函数的解ꎮ几何视角如图1所示ꎻ式(8)是解析视角ꎮ式(9)-式(11)是计算雅可比矩阵ꎮ图1㊀迭代法几何过程Δθ=J-1(θ0)[vd-f(θi)](8)JS(θ)=JS1(θ1)ңJS2(θ2)ң JSn(θn)ң[](9)JS1(θ1)ң=S1ң(10)JSi(θi)ң=[eS1θ1 eSi-1θi-1]∗Siң(11)式中∗为其伴随矩阵ꎮ对这种算法的进一步改进:1)末端执行器的位置描述f(θd)变更为正运动学计算出的矩阵T07ꎮ2)误差调整ꎮ用螺旋轴SMTң两分量的模代替末端执行器每次迭代的位置变化ꎮ3)引进伪逆矩阵J†避免求解奇异时无解的情况ꎮ在Matlab里编程为pinv(J)ꎮ当前基于b坐标系ꎬ变换为基于s坐标系:SMTbң=log(TMT07(θi))(12)SMTsң=(Tsb)∗SMTbң(13)式中:Tsb是坐标转移矩阵ꎻ∗为求其伴随矩阵ꎮ改进算法的流程图如图2所示ꎮ图2㊀改进的数值迭代法流程图3㊀验证正逆解3.1㊀正运动学方程㊀绘制三维模型图ꎬ并建立7R示意图(图3)进行验证ꎮ如图3(b)所示的坐标平面ꎬy方向定义为a并依次标号ꎬz方向定义为b也依次序标号ꎮ标示7个螺距为0的右手螺旋轴S1ң-S7ңꎮM=1000010240000100001éëêêêêùûúúúú(14)S7ң=[0㊀0㊀1㊀-a7㊀0㊀0]T=[0㊀0㊀1㊀-300㊀0㊀0]T(15)U a U 7Rb 7R .图3㊀三维模型图及7R示意图根据式(3)ꎬ使用矩阵分块后化简的运算过程ꎬ编程并计算结果ꎮT(θ)=c7-s70-2700s7s7c702700c7-30000100000éëêêêêùûúúúú(16)根据式(3)ꎬ发现将矩阵指数直接泰勒展开(采用了3种计算方法:Pada法㊁特征值法㊁6次的泰勒展开)得出的601结果虽然一致ꎬ但是它是虚数形式ꎬ增加了计算量ꎮ结果:TM_pada(θ)=c7-s70-2700s7s7c701350e-θ7i+1350eθ7i-30000100001éëêêêêùûúúúú(17)使用先进行矩阵分块然后利用特性化简的运算方法ꎬ该结果更准确㊁后期的运算量更小ꎮ代入式(7)ꎬ使用该方法分别在Matlab和Python中运算ꎬ得出的结果一致:T=c5-6c1234c7-s1234c7-s1234c7-c5-6c1234s7-s5-6c1234r1c1234s7+c5-6s1234c7c1234c7-c5-6s1234s7-s5-6s1234r2s5-6c7-s5-6s7c5-6r30001éëêêêêêùûúúúúúr1=150s1234-5-1350s12347-300s123-675s123457-6-675s123467-5-150s12345-1350s1234-7+600s1234+300s12+675s12345-6-7+675s12346-5-7-300s1+750s12345-6-750s12346-5r2=150c1234-5+1350c12347+300c123+675c123457-6+675c123467-5-150c1234-5+1350c1234-7-600c1234-300c12-675c12345-6-7-675c12346-5-7+300c1-750c12345-6+750c12346-5r3=2700s7c5s6-s5c6-1500s5s6-c5(1500c6-1500)-1200c5+12003.2㊀逆运动学方程1)第一次验证设初始位置为正解的0位置ꎬ转动角度为θlistꎮθlist=πꎻπ2ꎻπ3ꎻπ4ꎻπ5ꎻπ6ꎻπ7[]=[3.142ꎻ1.571ꎻ1.047ꎻ0.785ꎻ0.628ꎻ0.524ꎻ0.449]给逆解的初始值[3ꎬ1.5ꎬ1ꎬ0.6ꎬ0.5ꎬ0.4ꎬ0.3]ꎮ解得[3.161ꎬ1.563ꎬ1.059ꎬ0.762ꎬ0.628ꎬ0.523ꎬ0.449]ꎮ2)第二次验证因发现误差较大:1)改用角度制ꎻ2)迭代次数增加到1000次ꎻ3)精度调整为eω<0.0001ꎬev<0.0001ꎮ经过多组数据实验发现ꎬ相差3ʎ以内ꎬ位置完全重现ꎻ相差10ʎ以内ꎬ第一角度有0.1ʎ的偏差ꎻ相差15ʎ以上的逆运算ꎬ第一个角度有1ʎ以上的偏差ꎮ所以ꎬ该方法求逆解有完全重现的适用范围ꎬ需要把初始解猜测在真实解的附近15ʎ以内(表1)ꎮ表1㊀正逆解互相验证单位:(ʎ)㊀验证项目θ1θ2θ3θ4θ5θ6θ7Δθ初始角度10203040506070 猜测角度7172737475767计算的逆解102030405060700猜测角度6162636465666计算的逆解10.00120.00129.99939.9995060700.001猜测角度1112131415161计算的逆解10.0620.03229.94939.9595060700.060猜测角度0102030405060计算的逆解10.120.05329.91639.9325060700.100猜测角度-551525354555计算的逆解10.7420.40329.37339.4845060700.740续表1验证项目θ1θ2θ3θ4θ5θ6θ7Δθ猜测角度-641424344454计算的逆解11.0320.56629.12839.2765060701.030猜测角度-13-3717273747计算的逆解26.72824.46724.37534.4295060706.728猜测角度-15-5515253545计算的逆解24.46633.10318.25724.17350607014.466猜测角度-16-7414243444计算的逆解63.432-26.264-22.72585.55750607053.4324㊀结语本文重点介绍了如何使用形如螺旋楼梯的转向量计算正逆解ꎮ结合旋量与Newton-Raphson数值法求逆解ꎮ为涵盖转动机构可能出现的问题ꎬ采用目前串联机构中最复杂的7R机构并且使机构尽可能复杂ꎬ但是设计中没有涵盖helical螺旋和cylindrical圆筒等机构ꎮ在比较了不同的运算方法后ꎬ计算正解ꎬ得出先将矩阵分块㊁再利用特性化简的方法更好的结论ꎮ在计算逆解的过程中ꎬ发现当初始猜测的第一个角度超过真实解20ʎꎬNewton-Raphson数值法不会重现正解ꎮ验证结果表明旋量形式美观ꎬ建模快捷ꎬ编程明了ꎬ适用于机械臂中的串联机构㊁并联机构㊁转动关节㊁平动关节㊁螺旋关节等的运动学㊁动力学特性建模和分析ꎮ参考文献:[1]FLESHERSNꎬDOWNEYJEꎬWEISSJMꎬetal.Abrain-computerinterfacethatevokestactilesensationsimprovesroboticarmcontrol[J].Scienceꎬ2021ꎬ372(6544):831 ̄836.[2]KEVINMLꎬFRANKCP.Modernrobotics:mechanicsplanningandcontrol[M].Illinois:CambridgeUniversityPressꎬ2017.[3]刘世平ꎬ曹俊峰ꎬ孙涛ꎬ等.基于BP神经网络的冗余机械臂逆运动学分析[J].中国机械工程ꎬ2019ꎬ30(24):2974 ̄2977ꎬ2985.[4]赵京ꎬ王鑫ꎬ张自强ꎬ等.基于肘部自运动的主从异构7自由度机械臂运动映射及其几何逆解[J].机械工程学报ꎬ2020ꎬ56(15):181 ̄190.[5]YOUWSꎬLEEYHꎬOHHSꎬetal.Designofa3D-printableꎬrobustanthropomorphicrobothandincludingintermetacarpaljoints[J].IntelligentServiceRoboticsꎬ2019ꎬ12(1):1 ̄16.[6]BINDURAꎬNELOYAAꎬALAMSꎬetal.Sigma-3:Integrationandanalysisofa6DOFroboticarmconfigurationinarescuerobot[C]//20194thInternationalConferenceonRoboticsandAutomationEngineering(ICRAE).Singapore:IEEEꎬ2019:6 ̄11.[7]常健ꎬ王亚珍ꎬ李斌.基于力/位混合算法的7自由度机械臂精细操控方法[J].机器人ꎬ2016ꎬ38(5):531 ̄539.[8]张昌ꎬ武玉强.基于P-Rob六自由度机械臂运动学建模与仿真[J].包装工程ꎬ2020ꎬ41(11):166 ̄173.[9]WIEDMEYERWꎬALTOÉPꎬAUBERLEJꎬetal.Areal-time-capableclosed-formmulti-objectiveredundancyresolutionschemeforseven-DoFserialmanipulators[J].IEEERoboticsandAutomationLettersꎬ2021ꎬ6(2):431 ̄438.收稿日期:20210401701 博看网 . All Rights Reserved.。
七自由度浮渣铲除机器人的运动学正逆解研究(江西理工大学 341000) 摘要:本文用D-H方法在运动学分析过程中,求解本来没有唯一解的具有七个自由度的机器人系统的运动学方程。
并且加以验证运动学方程的正确性。
并总结出在运动方程正解求解过程中,坐标设置时应注意的问题及运动学方程求逆解的方法。
关键词:机器人,运动学,D-H方法中图分类号:TP242 文献标识码:A 文章编号: the kinematics research of Seven degree of freedom drosses eradicate the robot Zhang Xinyu Kuang Yishun (JiangXi University Of Science And Technology 341000) Abstract :D-H kinematic analysis method used in this process, there is not the only solution for the robot system with seven degrees of freedom ,but this paper Solute this question. And verified the accuracy of equations. And verified the accuracy of equations. And solving equations are summarized in the campaign process, coordinate the provision should pay attention to the issue, and the method to solute the Opposite kinematics . Keywords : robots, Kinematics,D-H method 1、前言机器人机构的运动学是研究机器人的基础,在研究过程中不考虑产生运动涉及的力和力矩,只是涉及到运动物体的位置、速度、加速度和位置变量对时间的高阶导数。
如何求解七自由度机械臂运动学机械臂是一种典型的多自由度机械系统,七自由度机械臂是指机械臂有七个独立运动自由度。
七自由度机械臂广泛应用于工业生产、医疗手术和科学研究等领域。
在机械臂的运动控制中,运动学是一个重要的研究方向,其目的是通过运动学模型求解机械臂的位置、速度和加速度等参数。
下面介绍如何求解七自由度机械臂的运动学问题。
一、建立机械臂运动学模型机械臂的运动学模型包括正运动学和逆运动学两种。
正运动学是指已知机械臂各个关节的角度和长度,求解机械臂末端的位置和姿态;逆运动学是指已知机械臂末端的位置和姿态,求解机械臂各个关节的角度和长度。
对于七自由度机械臂,需要建立其正逆运动学模型。
二、正运动学求解正运动学求解的方法有多种,其中最常用的是解析法和数值法。
解析法是指通过代数求解机械臂的位置和姿态解析解的方法。
数值法是指通过迭代求解机械臂的位置和姿态数值解的方法。
对于七自由度机械臂,解析法比较困难,通常采用数值法求解。
数值法的实现需要运用矩阵转换和旋转矩阵等数学方法。
三、逆运动学求解逆运动学求解是指已知机械臂末端的位置和姿态,求解机械臂各个关节的角度和长度。
逆运动学求解的方法有多种,其中最常用的是解析法和数值法。
解析法是指通过代数求解机械臂各个关节的角度和长度解析解的方法。
数值法是指通过迭代求解机械臂各个关节的角度和长度数值解的方法。
对于七自由度机械臂,解析法比较困难,通常采用数值法求解。
数值法的实现需要运用牛顿-拉夫森方法和LM法等数学方法。
四、结论通过上述方法,可以求解七自由度机械臂的运动学问题。
在实际应用中,根据具体问题的不同,可以选择适合的求解方法。
机械臂的运动学问题是机械臂控制研究中的重要问题,其解决对于机械臂的运动控制和精度提高具有重要意义。
一、概述机械臂是一种自动化控制系统中常见的装置,它能够模拟人手的动作,广泛应用于工业生产线、医疗设备、航天航空等领域。
机械臂的运动学逆解是对机械臂的运动学方程进行反向求解,以求得机械臂在给定位置下的关节角度。
本文将针对七自由度机械臂的运动学逆解问题进行深入探讨,使用MATLAB进行数值计算和仿真。
二、机械臂的七自由度机械臂的自由度指的是它的可运动关节数量。
七自由度机械臂意味着它有七个独立的运动关节,可以在三维空间中执行更加复杂的运动。
七自由度机械臂的运动学逆解较为复杂,需要利用数学方法来求解。
三、机械臂的运动学建模机械臂的运动学建模是描述机械臂运动学性能的过程,它是机械臂控制的基础。
在进行运动学建模时,需要建立机械臂的坐标系,并推导出机械臂的正运动学方程。
对于七自由度机械臂来说,其正运动学方程通常可以表示为一个复杂的矩阵方程。
四、机械臂的运动学逆解求解方法机械臂的运动学逆解求解方法有多种,常用的方法包括解析法和数值法。
在解析法中,可以利用几何和代数方法进行分析,推导出七自由度机械臂的逆运动学方程。
而在数值法中,则可以借助数值计算软件如MATLAB来进行求解。
五、MATLAB求解七自由度机械臂的运动学逆解MATLAB是一款强大的科学计算软件,它具有丰富的数值计算函数和工具箱,可以方便地进行复杂的数值计算和仿真。
在求解七自由度机械臂的运动学逆解时,可以利用MATLAB的矩阵运算和符号计算功能,快速高效地求解出机械臂的关节角度。
六、七自由度机械臂运动学逆解的仿真利用MATLAB进行七自由度机械臂的运动学逆解仿真,可以直观地展示机械臂在给定位置下的关节角度和轨迹。
通过仿真可以验证逆解的准确性,同时可以对机械臂的运动学性能进行进一步分析和优化。
七、结论七自由度机械臂的运动学逆解是机械臂控制的关键问题,它直接影响着机械臂的运动精度和灵活性。
利用MATLAB进行运动学逆解的求解和仿真可以帮助工程师和研究人员更好地理解机械臂的运动学特性,为机械臂的控制和应用提供重要的参考和支持。
七自由度冗余机械臂避障控制本文主要探讨了七自由度冗余机械臂避障控制的相关问题。
在机器人技术领域,机械臂的避障控制是一个关键的研究方向,它可以提高机器人的自主性和适应性。
本文综述了七自由度冗余机械臂避障控制的研究背景和意义,以及相关文献的主要成果和不足。
在此基础上,本文提出了七自由度冗余机械臂避障控制的研究方法,并通过实验进行了验证。
本文总结了研究成果和不足,并指出了需要进一步探讨的问题。
关键词:七自由度冗余机械臂,避障控制,机器人技术随着机器人技术的不断发展,机器人已经在许多领域得到了广泛的应用。
在机器人技术领域中,机械臂是机器人的重要组成部分,它的运动灵活性和精度直接影响了机器人的性能。
在复杂的工作环境中,机械臂的避障控制是一个重要的研究方向,它可以提高机器人的自主性和适应性。
特别是在七自由度冗余机械臂中,避障控制更加重要,因为这种机械臂具有更高的灵活性和适应性,但也带来了更高的控制难度。
七自由度冗余机械臂避障控制是一个复杂的问题,已经引起了广泛的研究。
在现有的研究中,主要采用了基于运动学和动力学模型的避障控制方法。
例如,有些研究者通过建立机械臂的运动学模型,预测机械臂在未来的运动状态,并以此为基础进行避障控制。
另外一些研究者则通过建立机械臂的动力学模型,对机械臂的力和运动进行预测和控制。
虽然这些方法取得了一定的成果,但它们都存在着一些不足之处,如控制精度不高、对环境的适应性不强等。
本文主要研究了七自由度冗余机械臂避障控制的问题。
我们建立了七自由度冗余机械臂的运动学和动力学模型,并通过计算机仿真软件进行了模拟实验。
在此基础上,我们提出了基于模糊逻辑的避障控制方法。
该方法通过引入模糊逻辑控制器,将机械臂的位姿误差、速度、加速度等作为输入,根据一定的规则进行模糊化处理和推理,从而得到控制量。
我们通过实验验证了所提出的方法的有效性和可靠性。
通过对比实验,我们发现基于模糊逻辑的避障控制方法相比传统的方法具有更高的控制精度和更强的环境适应性。
全面解析七轴柔性多关节机器人,值得细品!先看下面这个视频,国产7轴机器人和太极武学的对决!视频资料,建议wifi视频中的机器人是新松公司7轴柔性多关节机器人,是国内首台7自由度协作机器人,具备快速配置、牵引示教、视觉引导、碰撞检测等功能。
相较于市场上出现的同类机器人产品,基于自主研发技术,新松七轴机器人在负载或成本上都更优。
国产机器人将跨入人机协作新时代。
众所周知,目前较先进的传统机器人一般最多具有六个自由度,其中,前三个自由度引导夹手装置至所需的位置,而后三个自由度用来决定末端执行装置的方向。
在三维空间内,刚体需要六个独立参数确定其位姿,因此,机器人的任务空间最多需要六个自由度就足够了,一般不要求机器人具有六个以上的独立自由度,而过多的自由度就会产生冗余自由度。
冗余度机器人,是指含有主动关节数多于完成某一作业任务所需的最少自由度数的一类机器人。
其实,如上文所说,六个自由度是具有完成空间定位能力的最小自由度数,而增加的自由度便可改善机器人相关的运动学和动力学特性。
虽说真正产品化的七自由度工业机器人与传统的六自由度,甚至更少自由度的工业机器人相比,无论是从产品种类,还是销售占比差距都十分明显。
但正是由于其拥有有别于非冗余自由度机器人的冗余特性,使得七自由度的机器人优于六自由度机器人,而成为人们关注的焦点,也使得对冗余度机器人的研究变得日趋重要。
我国研发始于20世纪90年代初期我国对于七轴机器人的科研工作始于20世纪90年代初,而当时项目的领军人物正是我国已故的著名机器人技术专家、中国工程院院士张启先,而张启先院士的主要贡献之一便是完成了七自由度冗余机器人样机的研制。
上世纪80年代末,由于研制难度及其之大,国际上研制出七自由度冗余机器人样机的国家寥寥无几。
而张启先院士率领课题组经过几年的艰苦拼搏,在1993年年底完成了首台七自由度冗余机器人样机的研制,并一次通过“863”课题验收和部级鉴定。
尽管我国在冗余自由度机器人方面取得一定成果,但主要停留在学术论文、科研报告和实验样机的阶段,并没有实现真正的产品化发展,这无疑制约了我国机器人产品向高端产业化迈进的步伐。
目前较先进的传统工业机器人一般最多具有六个自由度,其中前三个自由度是用来引导夹手装置至所需的位置,而后三个自由度是用来决定末端执行装置的方向。
这也是能够完成空间定位要求的最小自由度数。
而最近兴起的七轴柔性多关节工业机器人,由于具备快速配置、牵引示教、视觉引导、碰撞检测等功能,逐渐成为人们关注的焦点。
相比于六轴机器人,其主要的技术优势在于以下这几个方面:更强大的运动学特性:在工业机器人的运动过程中,其所受到的限制主要来自三个方面:一是奇异构型,二是关节位移超限,三是工作环境中存在障碍当工业机器人处于奇异构型时,它的末端执行器不能绕某个方向进行运动,或者施加力矩,否则会与机械臂发生碰撞,因此奇异构型极大地影响了运动规划。
工业机器人各个关节的工作角度最理想的情况是正负180度,但在实际工作情况下,机器人每个关节的运动角度范围是受到一定限制的,往往达不到正负180度的理想情况。
在机械加工、焊接、装配等环境下,很多场合存在各种各样的环境障碍,传统的六轴机器人无法只改变末端机构的姿态,而不改变末端机构的位置,因而受到环境障碍的影响比较大。
七轴机器人由于增加了一个自由度,比六轴机器人拥有更强的避免形成奇异构型及从奇异构型中调整恢复正常状态的能力;增加的关节使转角可以多分配到一个关节上,每个关节的平均转角减少,有效避免了出现关节位移超限的情况;更高的自由度也更有利于避开工作环境中存在障碍。
这些都使得七轴机器人拥有比六轴机器人更强大的运动学特性。
更卓越的动力学特性:对于七轴机器人而言,利用多出来的自由度不仅可以通过运动轨迹规划达到良好的运动学特性,并且可以利用其结构实现更卓越的动力学性能。
七轴机器人可以对关节力矩进行重新分配,通过一定的算法计算出想要实现力矩平衡,机器人每个关节所要承受的力的大小。
对于传统的六轴机器人来说,其每个关节上的力是一定的,但力作用的力臂和承受能力不同,这样分配的结果可能很不合理。
而七轴机器人可以通过控制算法调整各个关节的力矩,让薄弱的环节承受的力矩尽量小,从而使整个机器人的力矩分配趋于均匀和合理。