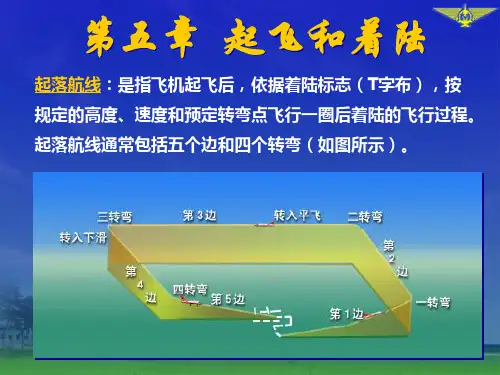
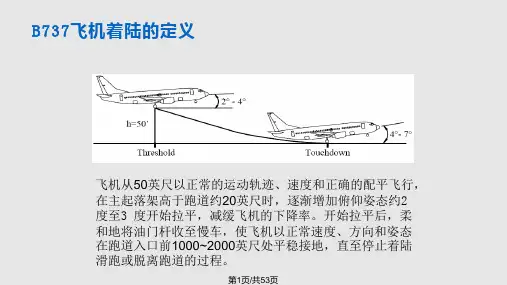
§3.4.2 起飞和着陆
- 格式:ppt
- 大小:3.79 MB
- 文档页数:24
关于起飞着陆标准的一些疑惑和思考?写在前面:很多之前学习的疑惑点没有时间去总结,现在有机会梳理一下,有些疑惑点已经能够理解,一些可能还是不能理解,梳理出来,让更多的人去思考也是很好的事情。
1、起飞标准在AC-97-1这个咨询通告里面,对于起飞的最小RVR都有一个标准,大家都比较清楚:这个表格里面对于RVR在不同情况下的最小数值给予了限制,比如如果无灯白天最低500m,接地区的RVR为控制RVR,且可以由驾驶员目测估算。
当时的疑问在于如果低于400m的起飞,比如当跑道边灯和中线灯都存在,有跑道末端灯,LVTO满足要求,按照文件要求,起飞的RVR应该最小是200m,D类飞机使用250m的标准起飞,但是控制RVR需要几端?之前都是按照小标4的要求,C类飞机使用接地区和中间端的RVR报告,但是奇怪的是跑道边灯和中线灯这条却没有标注4。
查看了ICAO附件,找了来源:看上面的图比较清晰,当跑道边灯和跑道中线灯存在时,最低视程还是200M,且这里并没有对跑道三个部分的RVR进行要求,直到降低到150的起飞,才要求三端RVR数值。
这里要和基于HUD的低能见度起飞区分开来,否则更容易混淆,基于HUD的低能见度起飞200m起飞和150m起飞都是接地区和中间端作为控制区RVR(C类飞机)。
按照ICAO和局方全天候运行中的要求,200m的起飞最低标准没有固定要求RVR几端,那么就可以理解为接地区够200m就可以申请RVR200的起飞(当然需要批复),而不是之前疑惑的必须接地区和中间端,这里也没有考虑机场程序标准,比如首尔,机场程序就要求执行150的起飞需要3端的RVR,但是200不需要。
2、着陆标准关于着陆标准更奇怪,在全天候运行中可批准的运行最低标准如下所示,也就是说自动进近至决断高以下的II类运行最低标准可以像下表一样,三端满足300/175/75m,但是在附录中关于RVR报告端的要求却不是这样。
这里疑惑点是末端并不是II类的必须RVR,且175m和75m都远远小于300m,那么这个300/175/75的标准怎么来?后面又看了几遍文件,有一些想法:1、首先,300/175/75首先是自动进近到决断高以下的II类运行最低标准(“自动进近至决断高以下”是指继续使用自动飞行控制系统,下降至一个不超过所适用决断高80%的高度。
飞机起降操作知识点总结一、起飞操作1. 预飞检查:在起飞前,飞行员需要进行预飞检查,确保飞机和技术设备的完好。
预飞检查包括检查发动机、机翼、起落架、轮胎、电气系统、油液系统等,确保飞机可以安全起飞。
2. 起飞计划:飞行员需要根据飞机的性能和客货的重量,制定起飞计划。
计划包括起飞速度、爬升率、起飞路径、起降距离等信息。
3. 起飞程序:飞行员需要按照起飞程序进行操作,包括启动发动机、调整舵面、与塔台通讯、增加推力、加速滑行、检查仪表、起飞等步骤。
4. 着陆操作1. 着陆前准备:在着陆前,飞行员需要进行着陆前准备工作,包括调整舵面、与塔台通讯、检查降落系统、检查驾驶舱设备等。
2. 着陆计划:飞行员需要制定着陆计划,包括着陆速度、下降率、着陆位置、着陆路径等信息。
3. 着陆程序:飞行员需要按照着陆程序进行操作,包括调整高度、速度和舵面,接近跑道、着陆循序等。
4. 着陆后操作:飞行员在着陆后需要进行着陆后操作,包括减速、关闭发动机、襟翼和减速板,并与地面指挥员通讯,完成着陆。
二、起降中的安全操作1. 在起飞和着陆过程中,飞行员需要密切关注飞行仪表和地面指示,确保飞机在正确的路径和高度。
2. 飞行员需要与塔台保持良好的通讯,如有意外情况需要及时向地面指挥员汇报。
3. 在起飞和着陆过程中,飞行员需要注意风向和风速,确保飞机在合适的条件下起飞和着陆。
4. 在起飞和着陆过程中,飞行员需要保持良好的机动性,及时应对飞机的各种情况,保证飞机的安全。
5. 在起飞和着陆过程中,飞行员需要严格遵守飞行手册和操作规程,确保飞机可以安全起飞和着陆。
6. 在起飞和着陆过程中,飞行员需要密切关注气象情况,如有恶劣天气需要及时调整飞行计划。
7. 在起飞和着陆过程中,飞行员需要密切关注飞机的性能数据,及时调整飞机的高度和速度,确保飞机可以安全起飞和着陆。
8. 在起飞和着陆过程中,飞行员需要与机场地面指挥员配合,确保飞机可以顺利地起飞和着陆。
主要包括起飞场地标注着陆场地标注(原创版)目录1.起飞场地和着陆场地的定义与重要性2.起飞场地和着陆场地的标注方法3.标注的起飞场地和着陆场地的应用领域正文起飞场地和着陆场地是航空领域中至关重要的概念,它们对于飞机的安全起飞和降落起着关键作用。
在飞机起飞和着陆的过程中,正确的场地标注能够为飞行员提供准确的信息,确保飞行过程的安全性。
接下来,我们将详细介绍起飞场地和着陆场地的标注方法以及它们的应用领域。
首先,起飞场地和着陆场地的定义与重要性。
起飞场地是指飞机从地面开始滑行并加速到离地速度,最终离开地面进入空中的区域。
着陆场地则是飞机从空中降落至地面的区域。
这两个场地的划分和标注对于飞机的起降操作至关重要,它们包括跑道、滑行道、停机坪等区域。
正确的起飞场地和着陆场地标注可以帮助飞行员了解可用的起降空间,从而确保飞机在起飞和降落过程中的安全。
其次,起飞场地和着陆场地的标注方法。
为了确保飞机在起飞和降落过程中的安全,起飞场地和着陆场地的标注需要遵循严格的标准。
这些标准包括国际民航组织(ICAO)的规定以及各国民航部门的相关规定。
在具体标注过程中,通常采用以下方法:1.跑道标注:跑道是飞机起飞和降落的核心区域,其长度、宽度、坡度等参数都需要严格标注。
跑道通常用白色的线条进行标注,线条的宽度和间距都有一定的规定。
2.滑行道标注:滑行道是连接停机坪、跑道和登机口的通道,它的标注要求相对较低。
滑行道通常用黄色的线条进行标注,线条的宽度和间距也有一定的规定。
3.停机坪标注:停机坪是飞机在起飞前和降落后停靠的区域,其标注要求相对简单。
停机坪通常用白色的线条进行标注,标注出停机位的大小和位置。
最后,标注的起飞场地和着陆场地的应用领域。
标注的起飞场地和着陆场地广泛应用于民用航空、军事航空以及通用航空等领域。
在这些领域中,正确的场地标注可以提高飞机起降的安全性,减少飞行事故的发生。
总之,起飞场地和着陆场地的标注对于飞机的安全起飞和降落至关重要。


中大型无人机飞控系统功能设计通用要求及符合性验证方法1范围本标准规定了中高风险民用大型无人驾驶航空器飞行控制、导航与管理系统的通用要求及符合性验证方法。
本标准适用于中高风险民用大型无人驾驶航空器飞行控制、导航与管理系统的设计、生产和审定等。
2术语和定义下列术语和定义适用于本文件。
2.1无人驾驶航空器是指机上没有机载驾驶员,自备动力系统的航空器,按照性能指标分为微型、轻型、小型、中型和大型。
2.2民用无人驾驶航空器是指从事除用于执行军事、警察和海关飞行任务外的无人驾驶航空器。
2.3大型无人驾驶航空器指最大起飞重量超过150千克的无人驾驶航空器。
2.4飞行控制、导航与管理系统无人机飞行控制、导航与管理系统是无人机的关键核心系统之一。
2.5飞行控制与管理功能飞行控制与管理功能一般分为飞行控制功能、飞行管理功能和告警功能。
注1:飞行控制功能:产生和传输控制指令,使航空器达到给定的飞行状态、按预期的轨迹飞行,并实现干扰抑制、容错控制、飞行包线保护、自动应急处置等;注2:飞行管理功能:整个飞行过程中的管理,一般包括导航管理、健康管理、余度管理、飞参记录功能、其它系统或设备管理(如需)等;注3:告警功能:以确保在出现功能故障和功能间的耦合故障时,最大限度向地面机组人员提供准确和足够的信息。
2.6人工遥控操纵子系统人工遥控操纵子系统是指人工在地面用来传递操纵指令给无人机的所有部件的总称。
2.7控制方式无人机控制方式分为自动控制、人工遥控及它们的组合。
注1:人工遥控:在人工遥控方式下,地面机组根据无人机的状态信息和任务要求控制无人机的飞行。
要求人工遥控的输入与飞行控制、导航与管理系统的工作相兼容,不应导致失控或不稳定。
注2:自动控制:在自动控制方式下,飞行控制系统根据传感器获取的航空器状态信息和任务规划信息自动控制无人机的飞行。
注3:人工遥控和自动控制的组合。
3中大型无人机飞控系统功能设计通用要求民用大型无人驾驶航空器飞行控制、导航与管理系统应符合本标准要求。
如何做好起飞和着陆这里我们根据手册和以往教员讲课的课件进行了简单的归纳,仅供大家参考:一、起飞中如何防止擦机尾(一)防止使用错误的起飞数据。
1、确保舱单数据是正确的。
如有怀疑一定要同配载人员核实。
2、防止CDU上输错数据。
输入数据后,左右座一定要核实。
3、查起飞性能手册时,一定要核实所使用的跑道、襟翼度数、是否关空调等,防止数据出现差错。
(二)正确应对强阵风、侧风/顺风带来的不利影响当了解到当时的气象条件不稳定时,首先从思想上引起足够的重视,最好使用全推力起飞。
阵风中起飞时,暂缓抬前轮,驾驶盘的输入量以保持机翼水平为宜,避免驾驶盘移动量过大,使用正常的抬头率2°—3°/秒,离地后平滑地从偏流状态中改出。
正常的起飞抬头率见下图:二、如何做好着陆?(一)稳定进近是防止重着陆的基础。
公司《运行手册》明确规定,目视天气条件下,在500英尺AGL;仪表天气条件下1000英尺AGL,飞机必须建立稳定进近,否则应终止进近。
稳定进近必须同时满足下列条件:●稳定的航道跟踪或着陆航向——飞机已按既定的仪表程序或目视参考保持在正确的横向或航迹上或只需少量横侧变化即可保持水平轨迹。
●稳定的下滑道跟踪或下降率——飞机已按既定的仪表程序或目视参考保持在正确的垂直轨迹上或只需少量俯仰变化即可保持垂直轨迹。
●稳定的着陆形态——飞机已建立所需的着陆形态。
●稳定的发动机功率——推力稳定在保持最后进近速度所需数值。
●稳定的安定面配平——飞机已按最后进近速度和目标下滑轨迹需求配平好。
●稳定的速度——目标速度-5≤指示速度≤目标速度+10——正确的进近速度为:Vapp=Vref+1/2顶风+(阵风-稳定风),最小为Vref+5,最大为Vref+20。
除了上述的1000英尺或500英尺的稳定需求外,为了安全、正常地着陆,建议还应特别注意低空的稳定,也就是说,在100英尺飞机应处于稳定状态,即使有些偏离,飞行员可以通过适量的修正使之恢复,并预估稳定状态是可以在限定时间内获得,否则,应执行复飞程序。