基于CAN总线的嵌入式控制系统
- 格式:pdf
- 大小:226.44 KB
- 文档页数:6
CAN总线在嵌入式Linux下驱动程序的实现时间:2009-11-05 09:41:22 来源:微计算机信息作者:黄捷峰蔡启仲郭毅锋田小刚1 引言基于嵌入式系统设计的工业控制装置,在工业控制现场受到各种干扰,如电磁、粉尘、天气等对系统的正常运行造成很大的影响。
在工业控制现场各个设备之间要经常交换、传输数据,需要一种抗干扰性强、稳定、传输速率快的现场总线进行通信。
文章采用CAN总线,基于嵌入式系统32位的S3C44B0X微处理器,通过其SPI接口,MCP2510 CAN控制器扩展CAN总线;将嵌入式操作系统嵌入到S3C44B0X微处理器中,能实现多任务、友好图形用户界面;针对S3C44B0X微处理器没有内存管理单元MMU,采用uClinux嵌入式操作系统。
这样在嵌入式系统中扩展CAN设备关键技术就是CAN设备在嵌入式操作系统下驱动程序的实现。
文章重点解决了CAN总线在嵌入式操作系统下驱动程序实现的问题。
对于用户来说,CAN设备在嵌入式操作系统驱动的实现为用户屏蔽了硬件的细节,用户不用关心硬件就可以编出自己的用户程序。
实验结果表明驱动程序的正确性,能提高整个系统的抗干扰能力,稳定性好,最大传输速率达到1Mb/s;硬件的错误检定特性也增强了CAN的抗电磁干扰能力。
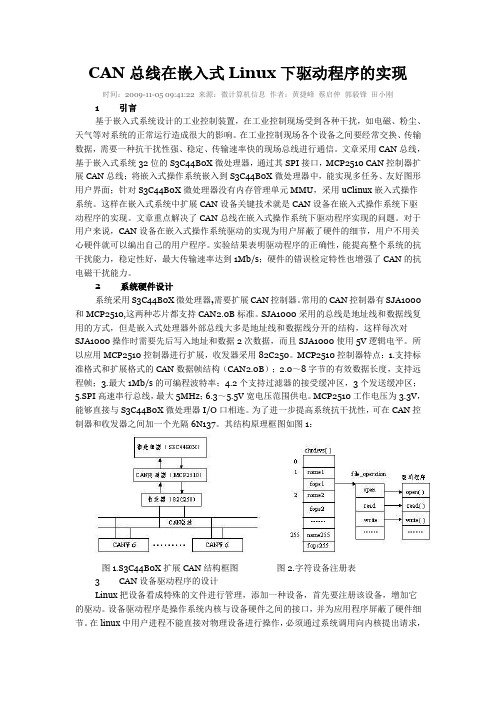
2 系统硬件设计系统采用S3C44B0X微处理器,需要扩展CAN控制器。
常用的CAN控制器有SJA1000和MCP2510,这两种芯片都支持CAN2.0B标准。
SJA1000采用的总线是地址线和数据线复用的方式,但是嵌入式处理器外部总线大多是地址线和数据线分开的结构,这样每次对SJA1000操作时需要先后写入地址和数据2次数据,而且SJA1000使用5V逻辑电平。
所以应用MCP2510控制器进行扩展,收发器采用82C250。
MCP2510控制器特点:1.支持标准格式和扩展格式的CAN数据帧结构(CAN2.0B);2.0~8字节的有效数据长度,支持远程帧;3.最大1Mb/s的可编程波特率;4.2个支持过滤器的接受缓冲区,3个发送缓冲区;5.SPI高速串行总线,最大5MHz;6.3~5.5V宽电压范围供电。