海底隧道钻机控制系统
- 格式:ppt
- 大小:1.01 MB
- 文档页数:10
自动控制原理实验一.海底隧道钻机控制系统1.题目描述:钻机在推进过程中,为了保证必要的隧道对接精度,施工中使用了一个激光导引系统,以保持钻机的直线方向。
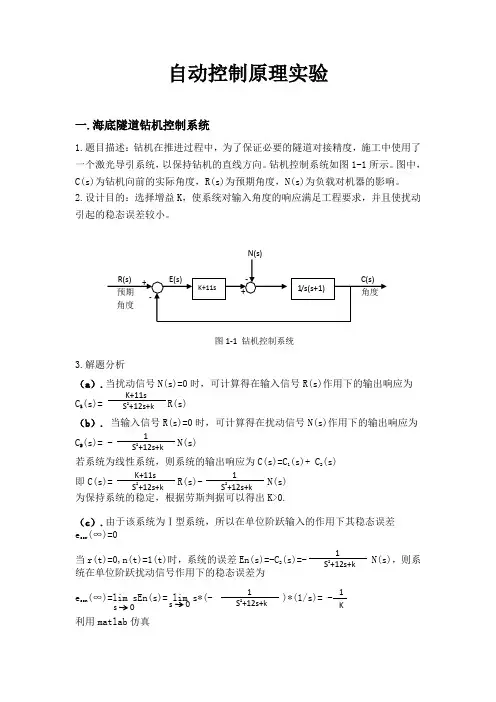
钻机控制系统如图1-1所示。
图中,C(s)为钻机向前的实际角度,R(s)为预期角度,N(s)为负载对机器的影响。
2.设计目的:选择增益K ,使系统对输入角度的响应满足工程要求,并且使扰动引起的稳态误差较小。
3.解题分析(a ).当扰动信号N(s)=0时,可计算得在输入信号R(s)作用下的输出响应为C 1(s)= R(s) (b ). 当输入信号R(s)=0时,可计算得在扰动信号N(s)作用下的输出响应为C 2(s)= - N(s) 若系统为线性系统,则系统的输出响应为C(s)=C 1(s)+ C 2(s) 即C(s)= R(s)- N(s) 为保持系统的稳定,根据劳斯判据可以得出K>0.(c ).由于该系统为Ⅰ型系统,所以在单位阶跃输入的作用下其稳态误差e ssr (∞)=0当r(t)=0,n(t)=1(t)时,系统的误差En(s)=-C 2(s)=- N(s),则系统在单位阶跃扰动信号作用下的稳态误差为e ssn (∞)=lim sEn(s)= lim s*(- )*(1/s)= - 利用matlab 仿真图1-1 钻机控制系统K+11s S 2+12s+k1S 2+12s+kK+11s S 2+12s+k 1S 2+12s+k 1S 2+12s+ks 01 K1S 2+12s+ks 0(1)、因为阶跃输入对系统来说是最严峻的工作状态所以取r(t)=1(t),且使n(t)=0,仿真模型为分别取不同K值,结果如下:K=15 K=20k=30 K=35k=40 k=50k=60 k=65观察以上仿真结果,得到在n(t)=0,r(t)=1(t)的状态下,随着K值的增大,当K 值增大到40左右时达到的稳态效果较好,再增大K值时仿真的曲线出现发散状态,系统变得不稳定。
深海石油钻井平台深度水下作业机器人控制系统的实现与优化随着全球对石油需求的增长,对油田探索和开发的需求也越来越大。
石油钻井平台是石油勘探开发过程中不可或缺的一环,而钻井平台深度水下作业机器人成为了石油勘探开发的重要工具。
这些机器人能够在深海环境下进行定位、采集数据、完成施工等工作,大大提高了深海石油钻井作业的效率。
本文将探讨深海石油钻井平台深度水下作业机器人控制系统的实现与优化。
一、深海石油钻井平台深度水下作业机器人的功能和特点深海石油钻井平台深度水下作业机器人是一种能够在水下深海环境下完成相关任务的机器人。
它可以完成石油钻井、采集海底数据、修建海底管道等任务。
与人工作业相比,深海石油钻井平台深度水下作业机器人具有以下特点:1、适应恶劣的深海环境:深海环境十分艰苦,水下高压、低温等因素都会给深海机器人的运行带来极大的挑战。
深海石油钻井平台深度水下作业机器人需要具备适应这种环境的能力。
2、高效完成作业任务:深海石油钻井平台深度水下作业机器人的配备可以依据具体的作业任务而定,它不受作业场地、时间、天气和人力资源等限制,工作效率比人工高得多。
3、准确收集丰富的数据:深海石油钻井平台深度水下作业机器人可以监测油田信息,收集水下各种数据,如温度、压力、重力、磁场等。
这些数据对于石油探测和勘探等有着重要的意义。
4、保障深海作业的安全:由于水下深海石油钻井平台环境恶劣且危险系数较高,深海石油钻井平台深度水下作业机器人可以取代人工完成特定的任务,有效的降低劳动安全风险和环境污染。
二、深海石油钻井平台深度水下作业机器人控制系统的组成深海石油钻井平台深度水下作业机器人控制系统包括硬件和软件两个不同的部分。
硬件部分主要负责数据的输入和输出,软件则负责机器人的自主控制和作业任务的编排,下面就详细介绍这两个部分。
1、硬件部分硬件部分包括机器人本身、多种传感器、电力供应设备、数据传输设备、进行控制执行的计算机等组成的一个系统。
各专业完整优秀毕业论文设计图纸海底隧道钻机控制系统设计课程设计时间:2014 .12 .22一、海底隧道自动控制系统框图由题已知条件,设N(s)=0,则系统在给定信号R(s)下的闭环传递函数()Φer s 为:可求得系统在给定信号R(s)时的稳态误差为:K s s s R s s s sE e s s ssr +++==∞→→12)()1(lim )(lim )(2200当R(s)=0时,在扰动信号N(s)作用下的系统闭环传递函数()Φen s 为:到此可求得系统在扰动信号N(s)作用下的稳态误差为:()()20()lim lim12S ssn S s s sN e sE s s k →→-∞==++由(1),(2)两式可得在R(s)和N(s)作用下系统的输出为:二、接下来根据不同的K 值MATLAB 绘制时域仿真曲线在单位阶跃输入的N(s),R(s)时有:)1..(..........1211)()(2)(Ks s Ks s R s E s er +++==Φ)2.( (121))()(2)(Ks s s N s E s en ++-==Φ22111()()()1212K s C s R s N s s s K s s K+=-++++ss N s s R 1)(,1)(==此时的输入稳态误差和扰动稳态误差为:在这里我取K 值分别为1,20,60,100,120,150,单位阶跃输入以及单位阶跃扰动下的系统框图和响应分别为(Δ=2):(注:由系统的稳定性和闭环传递函数可知,极点必须位于s 左半平面,故K 值必须大于0)下面的分析中将输入响应和扰动响应进行分开讨论。
(1)K=1系统的模拟框图为:在N (s)=0时得到的单位阶跃响应曲线,如下图:Ke e ssn ssr 1)(,0)(-=∞=∞容易看出此时系统调节时间达到二十五秒左右,不能满足题目要求。
此时系统响应没有超调。
令R(s)=0时,在扰动信号N(s)作用下得阶跃响应曲线,如下图:此时系统的扰动稳态误差为-1。
《高频电子技术》课程设计说明书课题名称:隧道钻机控制系统的分析与仿真学院:电气与信息工程学院专业:电子信息技术与工程课题 隧道钻机控制系统的分析与仿真一、设计目的1、了解LC 正弦波振荡器的工作原理。
2、掌握电容三点式正弦波振荡器的设计与主要性能参数测试方法。
3、掌握电感三点式正弦波振荡器的设计与主要性能参数测试方法。
4、掌握克拉泼和西勒振荡器的设计与主要性能参数测试方法。
5、掌握LC 正弦波振荡器的装调技术。
二、技术指标和设计要求1、技术指标三种正弦波振荡器的技术指标均为:振荡频率:016.3MHz f =;频率稳定度:40/10f f -∆≤;输出幅度:0.3V P P U -≥。
2、设计要求(1) 设计的宽带高频功率放大器满足技术指标;(2) 拟定测试方案和设计步骤;(3) 根据性能指标,计算元件参数,选好元件,设计电路并画出电路图;(4) 在面包板上或万能板上安装电路;(5) 测量各指标数据;(6) 写出设计报告。
三 、设计提示1、方案提示:(1)设计方案可先产生正弦波,然后通过整形电路将正弦波变成方波,再由积分电路将方波变成三角波;也可先产生三角波-方波,再将三角波变成正弦波。
(2)也可用单片集成芯片IC8038实现,采用这种方案时要求幅度可调。
2、实验仪器提示(1) 高频信号发出生器 1台(2) 数字万用表 1只(3)数字电压表 1只(4)面包板或万能板 1块(5)智能电工实验台 1台(6) 示波器 1台3、参考书[1] 胡寿松,自动控制系统[M].北京:科技出版社,2008[2] 吴晓燕,张双选,MATLAB在自动控制中的应用[M].西安:西安电子科技大学出版社,2011[3] 何衍庆,姜捷,江艳君,控制系统分析[M]、设计与应用.北京:化学工业出版社,2003[4] 范影乐,杨胜天,李铁,MATLAB仿真应用详解[M].北京:人民邮电出版社,2001[5] 刘豹,现代控制理论2版[M].北京:电子工业出版社,1996[6] 曹才开,信号与系统[M] 北京:清华大学出版社,2006[7] 高吉祥,《电子技术基础实验与课程设计指导》(第二版),电子工业出版社,2005。
《高频电子技术》课程设计说明书课题名称:隧道钻机控制系统的分析与仿真学院:电气与信息工程学院专业:电子信息技术与工程课题 隧道钻机控制系统的分析与仿真一、设计目的1、了解LC 正弦波振荡器的工作原理。
2、掌握电容三点式正弦波振荡器的设计与主要性能参数测试方法。
3、掌握电感三点式正弦波振荡器的设计与主要性能参数测试方法。
4、掌握克拉泼和西勒振荡器的设计与主要性能参数测试方法。
5、掌握LC 正弦波振荡器的装调技术。
二、技术指标和设计要求1、技术指标三种正弦波振荡器的技术指标均为:振荡频率:016.3MHz f =;频率稳定度:40/10f f -∆≤;输出幅度:0.3V P P U -≥。
2、设计要求(1) 设计的宽带高频功率放大器满足技术指标;(2) 拟定测试方案和设计步骤;(3) 根据性能指标,计算元件参数,选好元件,设计电路并画出电路图;(4) 在面包板上或万能板上安装电路;(5) 测量各指标数据;(6) 写出设计报告。
三 、设计提示1、方案提示:(1)设计方案可先产生正弦波,然后通过整形电路将正弦波变成方波,再由积分电路将方波变成三角波;也可先产生三角波-方波,再将三角波变成正弦波。
(2)也可用单片集成芯片IC8038实现,采用这种方案时要求幅度可调。
2、实验仪器提示(1) 高频信号发出生器 1台(2) 数字万用表 1只(3)数字电压表 1只(4)面包板或万能板 1块(5)智能电工实验台 1台(6) 示波器 1台3、参考书[1] 胡寿松,自动控制系统[M].北京:科技出版社,2008[2] 吴晓燕,张双选,MATLAB在自动控制中的应用[M].西安:西安电子科技大学出版社,2011[3] 何衍庆,姜捷,江艳君,控制系统分析[M]、设计与应用.北京:化学工业出版社,2003[4] 范影乐,杨胜天,李铁,MATLAB仿真应用详解[M].北京:人民邮电出版社,2001[5] 刘豹,现代控制理论2版[M].北京:电子工业出版社,1996[6] 曹才开,信号与系统[M] 北京:清华大学出版社,2006[7] 高吉祥,《电子技术基础实验与课程设计指导》(第二版),电子工业出版社,2005。
海洋钻机电气控制系统设计及关键技术海洋石油钻机的本质为一套结构非常繁杂的大型设备,这套大型设备通常是由旋转系统、起升系统、传动系统、控制系统、钻井液循环系统等许多个系统组建而成,从而能够使这套系统完成下钻、起钻、循环洗井、旋转钻进等一系列的工作。
然而要使这套设备完成这一系列的繁杂工作,就必须拥有一套完整的电控制系统。
但是我们国家软扭矩控制、海湾升沉补偿和软泵控制这些方面的技术还不够成熟,导致自动化程度偏低,所以未能广泛应用。
1 电器控制系统的基本构成电驱动石油钻机的电气控制系统总共是由3个部分所组成的。
首先是由柴油发电锯所组成的基础动力控制系统;其次是用于辅助和控制各电动组、照明、井场等多个作业区域的供电控制系统;最后是由直流调速所组成的设备的传动控制系统。
2 电气控制系统的设计我们所研究的70DBF电驱动的电器控制系统所应用的是由柴油发电机组通过并网的方式,最终产生电流,然后向所需要的系统供电的方式。
例如向VFD系统还有SCR系统同时提供AC600 V的电网,我们日常的生活用電是由一台600/400 V 1 250 kVA的变压器为电源提供的。
2.1 动力控制系统的设计动力控制系统的组成采用的是4台柴油机组采用并网发电的形式,这套动力系统的容量为6 000 kVA,系统的总功率为4 800 kW,系统的频率为50 Hz,系统的电压AC为600 V,每一台柴油机的单机功率都是1 200 kW。
这套系统的测量仪选用的是7 300全数字的智能电力仪表,这款仪表不仅在计算精度方面特别出色同时还能够完成计算机的一些通信任务。
2.2 电气传动控制系统的设计这套电气传动系统是由3台传动柜将发电并网母线上原本的交流电整流成直流电,然后用整流来的直流电来启动3台泥浆泵上面存在的6台串励直流电机,所运用的方式是一对二的操控方式。
为这套传动控制系统提供技术支持的是西门子6SE71交流变频调速技术和6RA70直流操控技术,都是全数字的。

自动控制课程设计题目题目一 转子绕线机控制系统设转子绕线机控制系统对应的结构图如图所示,绕线机用直流电机来缠绕铜线,能快速准确地绕线,并使线圈连贯坚固。
采用自动绕线机后,操作人员只需从事插入空的转子、按下启动按钮和取下绕好线的转子等简单操作。
设计控制器)(s G c 满足如下条件:1. 系统对斜坡输入响应的稳态误差小于10%,静态速度误差系数Kv=10;2. 系统对阶跃输入的超调量在10%左右;3. 按△=2%要求的系统调节时间为3s 左右。
要求:1.分析设计要求,说明控制器的设计思路;2.详细设计;3.用MATLAB 编程输出仿真结果及图形。
题目二海底隧道钻机控制系统连接法国和英国的英吉利海峡海底隧道于1987年12月开工建设,1990年11月,从两个国家分头开钻的隧道首次对接成功。
隧道长37.82km,位于海底面以下61m. 隧道于1992年完工,共耗资14亿美元,每天能通过50辆列车,从伦敦到巴黎的火车行车时间缩短为3h.钻机在推进过程中,为了保证必要的隧道对接精度,施工中使用了一个激光导引系统,以保持钻机的直线方向。
钻机控制系统如图所示。
图中C(s)为钻机向前的实际角度,R(s)为预期角度,N(s)为负载对机器的影响。
该系统设计目的是选择增益K,使系统对输入角度的响应满足工程要求,并且使扰动引起的稳态误差较小。
要求:1.分析设计要求,说明控制器的设计思路;2.详细设计;3.用MATLAB编程输出仿真结果及图形。
题目三哈勃太空望远镜指向控制哈勃太空望远镜于1990年4月14日发射至离地球611km的太空轨道,它的发射与应用将空间技术发展推向了一个新的高度。
望远镜的2.4m镜头拥有所有镜头中最光滑的表面,其指向系统能在644km以外将视野聚集在一枚硬币上。
望远镜的偏差在1993年12月的一次太空任务中得到了大范围的校正。
哈勃太空望远镜指向系统模型经简化后的结构图如图所示设计目标是选择放大器增益Ka 和具有增益调节的测速反馈系数K1,使指向系统满足如下性能:1. 在阶跃指令r(t)作用下,系统输出的超调量小于或等于10%.2. 在斜坡输入作用下,稳态误差较小。
43海洋石油工业高速发展,依托技术在进行海洋石油勘探开发中获得了很大的工业进步。
当前随着国产化的技术不断创新,我国在进行钻机仪表、钻井模块的设计和应用方面都已经拥有了自主知识产权。
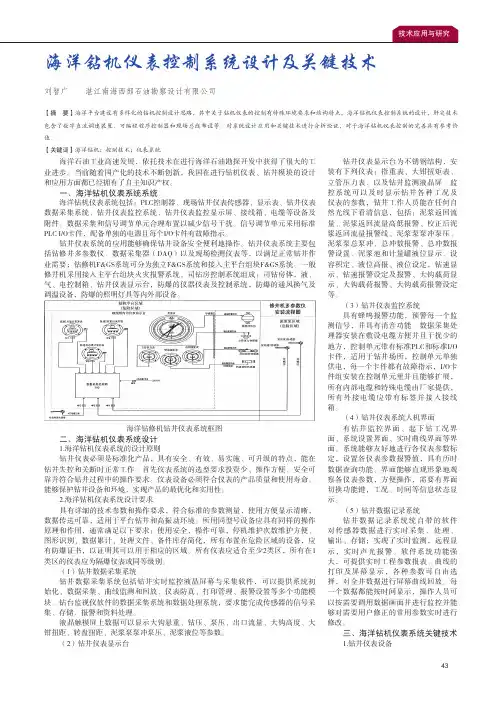
一、海洋钻机仪表系统系统海洋钻机仪表系统包括:PLC控制器、现场钻井仪表传感器、显示表、钻井仪表数据采集系统、钻井仪表监控系统、钻井仪表监控显示屏、接线箱、电缆等设备及附件。
数据采集和信号调节单元合理布置以减少信号干扰。
信号调节单元采用标准PLC I/O卡件,配备单独的电源且每个I/O卡件有故障指示。
钻井仪表系统的应用能够确保钻井设备安全便利地操作。
钻井仪表系统主要包括钻修井多参数仪、数据采集器(DAQ)以及现场检测仪表等,以满足正常钻井作业需要;钻修机F&GS系统可分为独立F&GS系统和接入主平台组块F&GS系统。
一般修井机采用接入主平台组块火灾报警系统。
司钻房控制系统组成:司钻房体,液、气、电控制箱、钻井仪表显示台,防爆的仪器仪表及控制系统,防爆的通风换气及调温设备,防爆的照明灯具等内外部设备。
海洋钻修机钻井仪表系统框图二、海洋钻机仪表系统设计1.海洋钻机仪表系统的设计原则钻井仪表必须是标准化产品,具有安全、有效、易实施、可升级的特点,能在钻井失控和关断时正常工作。
首先仪表系统的选型要求投资少、操作方便、安全可靠并符合钻井过程中的操作要求。
仪表设备必须符合仪表的产品质量和使用寿命。
能够保护钻井设备和环境,实现产品的最优化和实用性。
2.海洋钻机仪表系统设计要求具有详细的技术参数和操作要求,符合标准的参数测量,使用方便显示清晰,数据传送可靠,适用于平台钻井和高振动环境。
所用同型号设备应具有同样的操作原理和作用,通常满足以下要求:使用安全,操作可靠,停机维护次数维护方便、图形识别、数据累计、处理文件、备件库存简化,所有布置在危险区域的设备,应有防爆证书,以证明其可以用于相应的区域。
所有仪表应适合至少2类区,所有在1类区的仪表应为隔爆仪表或同等级别。

自动控制原理期末实践考察课题1、 已知某控制系统的开环传递函数为G p (S)= 4s(s+3) 试设计滞后校正环节。
要求阻尼比为ξ=0.4,自然频率ωn =1.5rad/s 。
(选题学生: )2、有一未校正系统,开环传递函数:G(s)=40k\s(s+2) 要求系统的静态速度误差系数Kv=20s-1 ,相角裕度y>=50度 ,幅值裕度不小于10dB设计步骤规范化要求:(1)未校正系统的分析:1)利用MATLAB 绘画未校正系统的开环和闭环零极点图2)绘画根轨迹,分析未校正系统随着根轨迹增益变化的性能(稳定性、快速性)(选题学生: )3、如图所示:1 ) 当k=8,a=0时,确定系统的阻尼比∈,无阻尼自然震荡频率w与在r(t)=t 作用下的系统稳态误差e ss ;2) 当k=8,a=0.7时,确定参数a 与在r(t)=t 作用下系统的稳态误差e ss ;3 在保证∈=0.7与在r(t)=t 作用时e ss =0.25的条件下,确定参数a 与k 。
(选题学生: )4、已知开环传递函数,G(s)=18.012++s s ,试用MATLAB 画出奈奎斯特图。
(选题学生: )5、串联超前校正装置的设计设计依据、要求及主要内容: 设单位反馈系统的开环传递函数为:要求校正后系统的截止频率 ,幅值裕度大于15dB ,相角裕度 ,试设计串联超前校正装置。
原系统的开环传递函数为:)15.0)(11.0(10)(++=s s s s G = 32100.050.6s s s++基本要求:1、对原系统进行分析,绘制原系统的单位阶跃响应曲线,2、绘制原系统的Bode 图,确定原系统的幅值裕度和相角裕度。
3、绘制原系统的Nyquist 曲线。
4、绘制原系统的根轨迹。
5、设计校正装置,绘制校正装置的Bode 图。
6、绘制校正后系统的Bode 图、确定校正后系统的幅值裕度和相角裕度。
7、绘制校正后系统的单位阶跃响应曲线。
澳门大学新校区海底专用隧道机电工程----设备监控子系统控制逻辑一、设计原则1、系统构成BAS根据被监控机电设备物理位置的分布及机电设备运营管理的拆分原则,在横琴、澳门侧弱电设备室内各设置一套区域控制器BAS-ACU4、BAS-ACU5,横琴洞口的风机房内设置一套BAS-3#RI/O,负责监控设备用房区域内由交局管理的机电设备;在横琴、澳门侧0.4kV配电室内各设置一套控制器BAS-ACU6、BAS-ACU7,负责由澳电运营管理的车行道及人行道正常照明的自动化控制;在隧道电缆廊道内分布设置三套区域控制器BAS-ACU1~BAS-ACU3,横琴、澳门侧雨水泵房内各设置一套BAS-1#RI/O、BAS-2#RI/O,负责监控整座隧道由民署运营管理的机电设备;利用车行道内由交通监控设置的区域控制器ACU1~ACU8,负责监控车行道内由交局负责运营管理的机电设备。
每套远程I/O控制箱通过通信口接入区域控制器。
除照明控制器外的BAS 设置其它区域控制器均通过光纤工业以太环网接入至隧道控制中心的中央监控系统。
隧道控制中心设置有设备监控系统的工作站,并与其它工作站互为备用。
设备监控系统作为火灾报警系统的一个重要的联动系统,在隧道控制中心设备监控系统的工作站与火灾报警系统之间有直接通信接口,保证设备监控系统更迅速有效地参加救灾行动。
2、监控对象1)、对隧道环境的监视包括有车道洞外的亮度、隧道风的风向及风速、反映汽车尾汽及交通状况的CO浓度和浓雾透光率;人行道内外的温度、反映空气质量的CO2浓度。
2)、对通风系统的监控包括隧道车道通风系统:射流风机、风机、电动风口、电动风阀;电缆廊道、人行道节推式排烟器等。
3)、对照明系统的监控包括隧道的加强照明、基本照明、引道及光过渡段照明等。
4)、对应急电源的监视包括EPS应急照明电源装置,UPS不间断监控电源装置。
5)、对给排水系统的监控包括隧道出入口雨水泵房、江中泵房、设备房内泵房的给排水设备。