1.2 控制理论概述
- 格式:pptx
- 大小:2.89 MB
- 文档页数:62
控制理论的基本知识点总结控制理论是研究如何设计和实现能够使系统产生特定性能的方法和技术的科学。
控制理论涉及系统建模、控制器设计、稳定性分析、系统优化等方面的知识。
控制理论在工程、经济、生物学、物理学等领域有着广泛的应用,可以帮助人们设计和改进各种系统,提高系统的性能和效率。
1. 系统建模系统建模是控制理论研究的基础,它是将系统抽象成数学模型的过程。
系统模型通常采用微分方程、差分方程、状态空间方程等形式。
在建模过程中,需要考虑系统的输入、输出、状态变量以及系统的动力学特性。
通过系统建模,可以对系统进行分析、仿真和控制器设计。
2. 闭环控制系统闭环控制系统是一种通过对系统的输出信号进行测量,并将测量结果反馈给控制器,从而调节系统的输入信号的控制系统。
闭环控制系统可以实现对系统输出的精确控制,对系统的不确定性和干扰具有较强的抑制能力。
闭环控制系统的设计和分析是控制理论研究的重要内容。
3. PID控制器PID控制器是一种最常用的控制器,它由比例控制器、积分控制器和微分控制器三个部分组成。
比例控制器负责根据当前误差调节控制信号,积分控制器负责根据过去的误差累积调节控制信号,微分控制器负责根据误差的变化率调节控制信号。
PID控制器简单易用,广泛应用于各种系统的控制中。
4. 稳定性分析稳定性分析是控制系统设计和分析的重要内容,它研究系统的稳定性条件和判据。
系统的稳定性分为渐近稳定和有界稳定两种。
通过稳定性分析,可以判断系统是否稳定,设计出稳定的控制器,保证系统的性能和可靠性。
5. 系统优化系统优化是控制理论的一个重要分支领域,它研究如何设计最优的控制器以实现系统的最佳性能。
系统优化方法包括线性规划、非线性规划、动态规划、遗传算法等。
通过系统优化,可以提高系统的性能和效率,降低系统的成本和能耗。
6. 鲁棒控制鲁棒控制是一种能够在系统参数变化和外部干扰存在时保持系统稳定性和性能的控制方法。
鲁棒控制方法包括H∞控制、小波控制、自适应控制等。
考研控制理论知识点解析考研是许多大学毕业生迈向研究生阶段的重要关口,而控制理论作为一门重要的考研科目,对于很多学子来说,可能是一个较为困扰的知识点。
本文将对考研控制理论的知识点进行解析,帮助考生们更好地理解和掌握。
一、控制理论概述控制理论是一门研究采取某种控制手段,使被控对象达到预期目标的科学、系统的理论。
它的发展历程可以追溯到工业革命以后。
控制理论主要包括控制系统建模、控制系统分析与设计等内容,是现代工程技术领域的重要组成部分。
二、控制理论的基本概念和基本方法1. 控制对象:控制理论中所指的被控制系统,可以是机械系统、电气系统、化工系统等各类系统。
2. 控制器:控制理论中的核心要素之一,是用来对被控系统进行调节和控制的设备。
3. 基本方法:控制理论主要采用传递函数、状态空间法、信号流图等方法对控制系统进行建模与分析。
三、控制理论的主要内容1. 系统建模:控制理论中的一个重要环节,用来描述控制对象与控制器之间的相互关系。
常用的建模方法有传递函数法、状态空间法等。
2. 稳定性分析:稳定是控制系统设计的基本要求,稳定性分析是控制理论的核心内容之一。
常用的稳定性分析方法有根轨迹法、频率域法等。
3. 控制器设计:控制器是控制系统的核心部分,控制器设计是控制理论的重点研究内容之一。
常用的控制器设计方法有比例积分微分控制器(PID控制器)设计、模糊控制器设计等。
4. 优化控制:控制理论的另一个研究方向是如何使系统在达到某种控制目标的同时,使所消耗的资源最小,性能最优。
常用的优化控制方法有线性二次型调节器(LQ调节器)设计、最小二乘法等。
四、控制理论的应用控制理论在现代工程技术领域有着广泛的应用。
以自动控制为代表的控制技术在工业生产、交通运输、航空航天、军事装备、能源利用等领域发挥着重要作用。
例如,在工业生产中,控制理论被应用于自动化生产线的控制和优化;在航空航天领域,控制技术被用于飞行器的自动驾驶和导航系统。
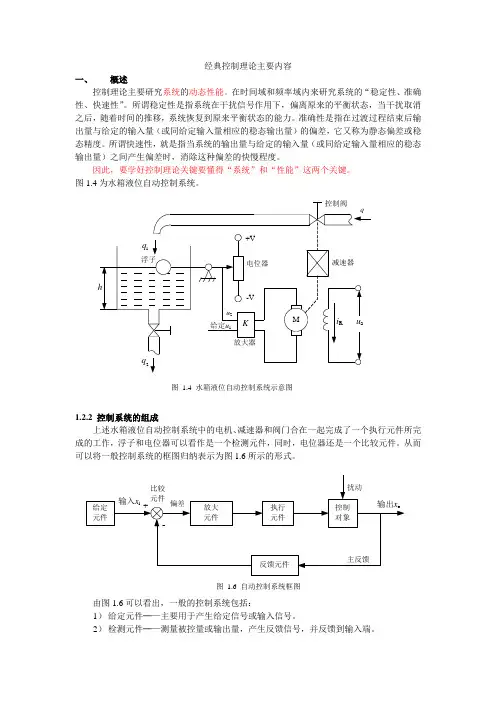
经典控制理论主要内容一、概述控制理论主要研究系统的动态性能。
在时间域和频率域内来研究系统的“稳定性、准确性、快速性”。
所谓稳定性是指系统在干扰信号作用下,偏离原来的平衡状态,当干扰取消之后,随着时间的推移,系统恢复到原来平衡状态的能力。
准确性是指在过渡过程结束后输出量与给定的输入量(或同给定输入量相应的稳态输出量)的偏差,它又称为静态偏差或稳态精度。
所谓快速性,就是指当系统的输出量与给定的输入量(或同给定输入量相应的稳态输出量)之间产生偏差时,消除这种偏差的快慢程度。
因此,要学好控制理论关键要懂得“系统”和“性能”这两个关键。
图1.4为水箱液位自动控制系统。
图 1.4 水箱液位自动控制系统示意图1.2.2 控制系统的组成上述水箱液位自动控制系统中的电机、减速器和阀门合在一起完成了一个执行元件所完成的工作,浮子和电位器可以看作是一个检测元件,同时,电位器还是一个比较元件。
从而可以将一般控制系统的框图归纳表示为图1.6所示的形式。
由图1.6可以看出,一般的控制系统包括:1)给定元件─—主要用于产生给定信号或输入信号。
2)检测元件─—测量被控量或输出量,产生反馈信号,并反馈到输入端。
3) 比较元件─—用于比较输入信号和反馈信号的大小,产生反映两者差值的偏差信号。
4) 放大元件─—对较弱的偏差信号进行放大,以推动执行元件动作。
放大元件有电气的、液压的和机械的。
5) 执行元件─—用于驱动被控对象的元件。
例如伺服电机、液压马达、液压缸以及减速器和调压器等。
6) 控制对象─—亦称被调对象。
在控制系统中,运动规律或状态需要控制的装置称为控制对象。
例如水箱液位控制系统中的水箱。
由图1.6还可以看出,系统的各作用信号和被控制信号有:1) 输入信号─—又称为控制量或调节量,它通常由给定信号电压构成,或通过检测元件将非电输入量转换成信号电压。
如给定电压1u 。
2) 输出信号─—又称为输出量、被控制量或者被调节量。
它是被控制对象的输出,表征被控对象的运动规律或状态的物理量。
控制理论:介绍控制理论的基础知识,包括反馈、传递函数和稳定性控制理论是一门研究如何通过设定输入来影响系统行为的学科。
它在许多领域都有广泛的应用,如工程、自动化、经济学和生态学等。
控制理论的核心是通过反馈机制来调整输出,以使系统保持稳定和良好的性能。
本文将介绍控制理论的一些基础知识,包括反馈、传递函数和稳定性。
什么是反馈?在控制系统中,反馈是一种通过测量系统输出并与期望输出进行比较来调整输入的机制。
它可以帮助系统实现所需的稳定性和性能。
反馈可以分为正反馈和负反馈两种类型。
正反馈会增强系统的不稳定性,而负反馈则会减少系统的偏差和波动。
以一个简单的温度控制器为例,当温度升高超过设定值时,控制器会打开冷却系统,并发送一个信号给加热系统,要求其减少加热功率。
当温度降低到设定值以下时,控制器会关闭冷却系统,并发送一个信号给加热系统,要求其增加加热功率。
这种反馈机制可以使系统保持在稳定的温度范围内。
传递函数是什么?传递函数是描述线性系统输入输出关系的数学工具。
它将输入信号转换为输出信号,并用数学方程表示。
传递函数可以帮助我们理解系统的动态特性和响应。
传递函数通常用符号G(s)表示,其中s是复变量。
传递函数的一般形式为:G(s) =其中N(s)和D(s)是多项式函数,它们的系数代表了系统的特性。
传递函数可以通过系统的微分方程来推导。
例如,考虑一个简单的质量-阻尼-弹簧系统,其微分方程可以表示为:m + b + ky = u其中m是质量,b是阻尼系数,k是弹簧常数,y是位移,u是输入信号。
将上述微分方程做拉普拉斯变换,并解出传递函数,可以得到系统的传递函数表示形式:G(s) =通过传递函数,我们可以分析系统的稳定性、频率响应和时域响应等。
稳定性是什么?在控制理论中,稳定性是指系统在给定条件下的操作状态是否会持续保持。
稳定的系统可以达到稳定的输出,而无稳定的系统可能会产生不受控制的振荡或偏差。
稳定性可以通过控制系统的传递函数来分析。
河南省考研自动化控制工程复习资料控制理论与应用方法论河南省考研自动化控制工程复习资料-控制理论与应用方法论控制理论是自动化控制工程中的重要内容之一。
它涉及了控制系统的设计、分析和应用,对于提高工程质量、提高生产效率等方面具有重要作用。
在河南省考研自动化控制工程的复习中,理解控制理论并掌握其应用方法论是非常重要的。
一、控制理论基础1.1 控制理论的概述控制理论是研究如何使系统输出按照期望值或规定要求进行调节的科学方法。
1.2 控制系统的基本组成控制系统由被控对象、传感器、控制器和执行器等几个基本部分组成。
1.3 控制理论的分类控制理论可以分为经典控制理论和现代控制理论两大类。
1.4 经典控制理论经典控制理论包括PID控制、根轨迹分析和频域分析等内容。
1.5 现代控制理论现代控制理论包括状态空间分析、最优控制和自适应控制等内容。
二、控制理论的应用方法论2.1 控制系统的建模掌握控制系统的建模方法,包括系统的数学模型和框图表示等。
2.2 控制系统的稳定性分析通过稳定性分析,确定控制系统的稳定性边界,保证系统运行的可靠性。
2.3 控制器的设计与调节根据系统的特点和要求,选取合适的控制器类型和参数,实现对系统的精确控制。
2.4 控制系统的性能指标理解控制系统的性能指标,包括超调量、调节速度和稳态误差等,以评估系统的控制性能。
2.5 控制系统的优化方法通过优化方法,改进控制系统的性能,使系统运行更加稳定和高效。
三、控制理论与应用的案例分析3.1 温度控制系统以温度控制系统为例,讲解控制理论的应用方法步骤,并给出具体的设计和调节过程。
3.2 速度控制系统以速度控制系统为例,介绍控制理论的应用方法,包括建模、控制器的设计和性能指标的分析等。
3.3 位置控制系统以位置控制系统为例,详细阐述控制理论的应用方法,给出系统的建模和控制器的设计过程。
综上所述,控制理论与应用方法论在自动化控制工程中扮演着重要的角色。
在河南省考研自动化控制工程的复习中,深入理解控制理论的基础知识、掌握其应用方法以及通过实际案例分析将理论应用到实践中,能够提高对控制系统的理解和应用能力,为工程实践打下坚实的基础。