EM_PLANNER工作过程
- 格式:ppt
- 大小:707.50 KB
- 文档页数:15
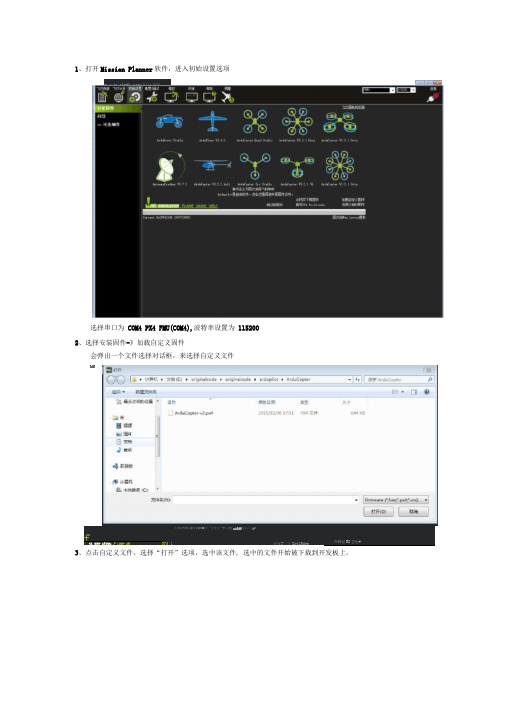
1、打开Mission Planner 软件,进入初始设置选项选择串口为 COM4 PX4 FMU(COM4),波特率设置为 1152002、选择安装固件-》加载自定义固件会弹出一个文件选择对话框,来选择自定义文件巧币叩讥屋冃腳■芹・:壬厂甲㈡克milTF 去口 1"f 在辑赵SI 岂也#丄11 MJU AlYNk P 【dMF dW NFf 1 电写F !4 ExtlMder 3、点击自定义文件,选择“打开”选项,选中该文件, 选中的文件开始被下载到开发板上。
Km Avifw LlJIlbud LJL 勇应L 吻關I.5、等音乐停止之后,点击“ 0K ”按钮之后,就可以完成飞控板的软件下载操作。
会显示提示“ UploadDone ”,即下载完成。
6.此时点击右上角的“连接”图标,就可以连接到飞控板上,对飞控板的参数进行调试 。
此时,界面出现一个新增的“必要硬件”选项,点击该选项,会发现该选项下面包含下载完成后,会显示提示,要求在飞控板上的音乐停止之后,再点击“ 0K ”按钮 Sir.AM 1** 4血时: htM 卄血 幻工 |. 口 ! iH «<tWWJFMd 比站小*El ■鬲“百士虑吹个选项,“机架类型”、“飞行模式”、“故障保护”三个选项可以选择自定义模式, 度计校准”、“罗盘”、“遥控器校准”三个选项则需要自己进行校准。
飞1i«ht養I■杞-“加速l^trnw -\rT*p tlkrifS ftBUiK Wft *U _~ ~~ 7、“机架类型”选项可以选择默认& 1、“加速度计校准”需要自己校准,点击“校准加速度计”进入校准,8.2、在将飞控板水平放置之后,点击按钮,完成水平位置的校准IVUMA 怖幔 會③H1MB WW UM IN* 少怡(3口 [□鬼 冃导>¥3tr|-K^nreuiai J*^u+ ¥4J4 Lwd ud ti +u ur■连虎计枝丸歸■驚护 sir”#8.3、在将飞控板左向放置之后,点击按钮,完成向左方向的校准飞斤■«! T.frrffl VH-4||E aid 浮・ KtfiHaia Fihid# ifc I lib iUIFT Hl da H >3 |i ■■■ uy bFyEli 楼式8.4、在将飞控板右向放置之后,点击按钮,完成向右方向的校准占 ^rdkit«4«r VtiV.MtK 帕 W 呼・園鬣初砧审口机果美■wia«TtKA8.5、在将飞控板向下放置之后,点击按钮,完成向下方向的校准鼻■聿星 血酬庚计腔■8.6、在将飞控板向上放置之后,点击按钮,完成向上方向的校准3 Mmtr* buhl 1_二$泌血“ WiZnptar 引:hia | 旦■\i-Rli配B鼻武(3■也L mSOXm电at计校冶■L疙夬:X Pi.ua whiil-i u*» It ut ■ +U UFIff ■贰9、“罗盘”校准9.1对罗盘进行校准时,点击“罗盘”选项,进入“罗盘”选项界面,接着点击“现场校准界面”,进入校准界面。


EM软件操作手册EM软件操作手册EM软件是一款重要的工程软件,广泛应用于无线电通信、雷达、天线、电磁兼容等领域。
本操作手册将为您介绍EM软件的基本操作方法和应用技巧。
1.软件安装和启动安装过程按照主机的系统提示进行即可,启动EM软件后,进入主界面,可以看到菜单栏、工具栏、绘图区等基本组成部分。
在操作时,建议首先阅读软件说明书或在线帮助文档,对软件功能有清晰的认识。
2.模型建立EM软件主要用于模拟各种电磁场环境,模型建立是进行仿真前的基本工作。
在EM软件中,可以通过基于CAD文件的逆向建模方式,直接导入各种三维几何模型;也可以通过直接建模方式手动创建各种密度分布、物理尺寸、形状复杂的电磁场三维几何形体。
3.网格划分将建立好的几何模型进行网格划分是进行电场仿真的关键步骤,划分网格需要根据实际情况选择不同的划分方式。
一般而言,可以手动设置网格密度和分布,也可以通过网格自适应分布算法在几何模型上自动生成合适密度的网格。
4.边界条件在进行电场计算时,需要确定边界条件,即如何处理空间中的边界条件,常用的方法有各种常量电势边界,及任意和自适应阻抗边界;特殊情况下,也可以通过定义电介质等介质方法进行模拟。
5.模拟运行经过模型建立、网格划分、边界条件设置等步骤后,就可以进行电场模拟计算了。
在进行计算时,可以通过修改参数控制模型仿真的范围和准确性,比如调节计算步长、求解方法、场stabilier等等。
6.结果分析仿真计算完后,可以得到各种场强电荷、电流、电介质等相关的结果数据。
这些数据需要进行结果分析,以确定结果的合理性和有效性。
在结果分析时,可以通过可视化工具绘制场强、磁感应强度、电流密度等场中物理量的二维或三维图像,更直观的展示模拟结果,并得出相关结论。
总之,EM软件是一款功能强大的工程软件,通过了解软件的基本操作方法和应用技巧,可以更好地发挥EM软件的作用,成功解决各类电磁场问题。
希望本操作手册能对你们的工作有所帮助。
Baidu Apollo -- EM Planner1. EM Planner 中的EM的含义最大期望算法 Expectation Maximum最大期望算法在统计中被用于寻找,依赖于不可观察的隐性变量的概率模型中,参数的最大似然估计。
在统计计算中,最大期望(EM)算法是在概率模型中寻找参数最大似然估计或者最大后验估计的算法,其中概率模型依赖于无法观测的隐性变量。
最大期望算法经常用在机器学习和计算机视觉的数据聚类(Data Clustering)领域。
最大期望算法经过两个步骤交替进行计算第一步,计算期望(Expectation ),利用对隐藏变量的现有估计值,计算其最大似然估计值;第二步,最大化(Maximum),最大化在E步求得的最大似然值来计算参数的值。
M步上找到的参数估计值被用于下一个E步计算中,这个过程不断交替进行。
EM简单教-程EM是一个在已知部分相关变量的情况下,估计未知变量的迭代技术。
EM的算法流程如下:初始化分布参数;重复直到收敛:E步骤:根据隐含数据的假设值,给出当前的参数的极大似然估计;M步骤:重新给出未知变量的期望估计。
应用于缺失值。
2. Baidu Apollo EM Motion Planner该系统主要特性有三个,如文中所言:The top layer of the system is a multilane strategy that handles lane-change scenarios by comparing lane-level trajectories computed in parallel.Inside the lane-level trajectory generator, it iteratively solves path and speed optimization based on a Frenet frame.For path and speed optimization, a combination of dynamic programmingand spline-based quadratic programming is proposed to construct a scalable and easy-to-tune framework to handle traffic rules, obstacle decisions and smoothness simultaneously.简单梳理下:通过平行计算来支持变道场景;在Frenet 坐标系下,迭代处理路径和速度的优化问题;通过DP和QP的组合,构建可扩展和易调节的框架,以此同时支持交规,障碍物决策和平滑;通过以上几点特性,该框架可以覆盖高速和低速驾驶场景。

ego planner matlab代码EGO Planner是一种用于优化函数的算法。
它的主要思路是在不断地调整参数的基础上,寻找一个全局最优解。
这里我将介绍如何使用Matlab编写EGO Planner的代码。
第一步:简单介绍EGO Planner的算法思路。
EGO Planner通过三个步骤来优化一个函数。
首先,它将使用高斯过程模型来估计该函数的值。
然后,它将搜寻具有最大期望改善(Expected Improvement,EI)值的下一个采样点。
最后,它将把新的采样点的值添加到原始数据集中,并根据新的数据重新训练高斯过程模型。
第二步:定义问题。
在这一步中,我们需要定义我们要优化的函数。
为了演示方便,我们在这里假设我们要优化一个简单的一次方程,即y = ax + b。
第三步:生成采样点。
由于EGO Planner需要输入一个起始数据集,因此我们需要在这一步中生成一些初始采样点。
在这里,我们可以使用任何随机生成器来生成一些点。
第四步:训练高斯过程模型。
在这一步中,我们需要使用训练点来训练高斯过程模型。
这可以通过使用gpml工具箱来实现。
第五步:计算EI值。
在这一步中,我们需要使用训练好的高斯过程模型来计算每个采样点的EI值。
这可以通过使用EI.m函数来实现。
第六步:找出EI值最大的采样点。
在这一步中,我们需要找到具有最大EI值的采样点。
这可以通过使用Matlab的内置函数fminbnd来实现。
第七步:将最新采样值添加到数据集中。
在这一步中,我们需要将最新的采样点的值添加到数据集中。
这可以通过使用Matlab中的cat函数来实现。
第八步:重新训练高斯过程模型。
在这一步中,我们需要使用新的数据来重新训练高斯过程模型。
这可以再次使用gpml工具箱来实现。
第九步:重复步骤4-8,直到满足收敛条件。
在这一步中,我们需要循环执行步骤4-8,直到满足收敛条件为止。
这由我们自己来决定,可以根据实际情况逐渐逼近最优解。
Apollo 2.5自动驾驶规划控制系统详细介绍
在第4期Apollo自动驾驶公开课中,来自Apollo团队的资深架构师-朱帆老师对Apollo 2.5自动驾驶规划控制系统进行了详细介绍。
这里,我们将整理后的公开课视频和资料分享给大家,没能到达现场的开发者可以通过视频和PPT资料来详细了解课程内容。
Apollo 2.5自动驾驶规划控制
技术难点
规划模块所面临的技术难点有三点。
第一,车辆所处的环境复杂度高。
因此传感器检测返回的数据复杂,障碍物个数种类多;路况信息复杂,在高速上一秒钟车辆能跑出30米,情况瞬息万变。
第二,系统对规划模块的要求高。
规划模块需要覆盖所有的ADAS场景,对模块计算的实时性和稳定性有着很高的要求。
第三,这是一个全新的未知领域,能够从外界获得的信息有限。
虽然有过去长期的积累,但是依然有多重难题需要解决。
整体思路
下面来看一下规划模块是如何实现的。
想象一个人在开车,要从A点开到B点;他有多种方式可以完成这一任务,但是不同的方式,成本是不一样的。
那么如何去找一个成本最低的规划曲线呢?开发者面临的是一个三维空间中的优化问题,包括路面的二维平面,也包括时间维度。
这是一个N立方难度的问题,Apollo 2.5的解决方法是,把这个N立方级别的问题,分拆成两个N平方级别的问题。
也就是在x-y维度上求解,进行路径规划;在路径规划的基础上,以规划出来的路径为s轴,在s-t维度上。
运动控制算法笔试一、轨迹优化1、说明规划算法建模过程。
(如何设计代价函数和约束)2、说明轨迹规划和路径规划区别。
3、说明规划与控制的区别。
(曲线)4、说明DP和QP优化的时候考虑的约束及优化目标。
5、如何考虑障碍物?6、说明Lattice和Em的基本思路。
7、Lattice为什么使用五次多项式?多项式次数对于拟合曲线有什么影响?8、什么是AX、DX、RRT?用途是什么?9、说明Dijkstra和蚁群算法的特点。
10、搜索算法有哪些,用途是什么?11、什么是轨迹生成算法?(曲线)12、hybrid Astar算法流程及应用二、控制算法1、规划和控制的关系?如何相互配合影响的?2、什么是运动控制?控制具体控制了什么,输入输出是什么?如何实现的?表现到车辆状态上又是怎样的?3、什么是PID、LQR、MPC算法?用途是什么?分别解决了什么问题?4、传统PID、LQR、MPC各自的优缺点有哪些?对于缺点有哪些解决方法?5、PID超调如何解决,积分饱和如何解决?LQR如何建模,状态量有哪些,控制量有哪些?6、如何设计MPC?三、计算几何1、如何求点在线上的投影?如何求点到直线距离?2、如何求SL坐标系3、两条直线的交点(向量)4、碰撞检测方法5、曲线(贝塞尔,b样条,正弦曲线,圆弧曲线,螺旋曲线等)6、五次曲线、回旋线、三次样条曲线、B样条曲线的表示。
四、车辆动力学和运动学模型1、车辆动力学和运动学模型不同,原因以及使用的情况代码类一、C++编程1、C++函数指针有哪几类?函数指针、lambda、仿函数对象分别是什么?2、如何利用谓词对给定容器进行自定义排序?3、传递引用和传递值的区别?传递常引用和传递引用之间的区别?传递右值引用和传递引用之间的区别?4、函数对象应该通过什么传递?5、什么是万能引用?用途是什么?6、什么是完美转发?用途是什么?7、std::unorded_map和std::map之间的差异是什么?8、虚函数、虚表的原理?9、如何在c++中创建线程?如何在线程间同步?10、互斥锁是什么?用途是什么?条件变量又是什么?为什么要用条件变量?11、智能指针和祼指针之间的差异?为什么要用指针的引用计数?12、智能指针分哪几种?std::unique_ptr,std::shared_ptr,std::weak_ptr各有何用途?13、悬挂指针会导致什么问题?如何避免?14、traits是什么?什么时候用traits?参考答案(部分)规划与控制岗一、轨迹优化1、说明规划算法建模过程。
技术⽂档⼆次规划(QP)样条路径
参考:
Apollo的Planning分为参考线平滑、决策、路径规划、速度规划等部分。
从整体上来说,规划模块的架构分为两个部分:⼀部分负责对数据的监听、获取和预处理;另⼀部分负责管理各个优化模块。
数据进⼊后,对其综合处理为规划模块的内部数据结构,由任务管理器调度合适的优化器进⾏各个优化任务。
综合优化的结果,经过最终的验证后,输出给控制模块。
在设计上,实现了策略的可插拔,使得各个优化器可以灵活配置不同策略,提升迭代效率。
EM-Planner是具体的规划实施类,它基于⾼精地图、导航路径及障碍物信息作出实际的驾驶决策,包括路径、速度等⽅⾯。
⾸先使⽤DP(动态规划)⽅法确定初始的路径和速度,再利⽤QP(⼆次规划)⽅法进⼀步优化路径和速度,以得到⼀条更平滑的轨迹,既满⾜舒适性,⼜⽅便车辆操纵。
基于样条的车辆轨迹优化⼆次规划,为了寻求更优质更平滑,体感更好的路径,需要使⽤⼆次规划的⽅法寻找。
需要的限制条件有:曲率和曲率连续性、贴近中⼼线、避免碰撞。
将路径划分为n段,每段路径⽤⼀个多项式来表⽰。
每个样条段 i 都有沿着参考线的累加距离。
每段的路径默认⽤5阶多项式表⽰:
优化问题:
初始点约束:
终点约束:
平滑节点约束:
点采样边界约束:
在路径上均匀的取样m个点,检查这些点上的障碍物边界。
将这些约束转换为QP约束不等式,使⽤不等式:。
apollo em planner解读摘要:1.引言2.Apollo EM Planner 介绍3.Apollo EM Planner 的工作原理4.Apollo EM Planner 的应用场景5.Apollo EM Planner 的优势和局限性6.结论正文:【引言】随着现代社会的快速发展,人们对于出行和物流的需求日益增长。
为了满足这些需求,自动驾驶技术应运而生。
Apollo EM Planner 是百度Apollo 团队研发的一款用于自动驾驶的规划器,本文将对它进行解读。
【Apollo EM Planner 介绍】Apollo EM Planner,即Apollo Environment Matrix Planner,是基于环境矩阵的规划器。
它主要用于自动驾驶汽车在复杂城市环境中的路径规划,包括行驶道路、交通信号灯、行人、车辆等元素的考虑。
【Apollo EM Planner 的工作原理】Apollo EM Planner 的工作原理主要分为以下几个步骤:1.构建环境矩阵:通过激光雷达、摄像头等传感器采集数据,构建出环境中的各种元素,如车辆、行人、交通信号灯等,形成一个环境矩阵。
2.状态估计:根据环境矩阵,估计车辆当前的状态,如位置、速度、方向等。
3.预测:根据车辆的状态和环境矩阵,预测未来一段时间内车辆的运动轨迹以及环境中的其他元素的变化。
4.规划:在预测的基础上,规划出一条安全的行驶路径,包括行驶方向、速度、目的地等。
5.控制:将规划出的路径转化为具体的控制指令,如油门、刹车、转向等,发送给汽车的执行器。
【Apollo EM Planner 的应用场景】Apollo EM Planner 适用于各种复杂的城市道路环境,包括拥堵路段、红绿灯路口、行人过马路等场景。
在这些场景中,Apollo EM Planner 可以实现高效、安全的自动驾驶。
【Apollo EM Planner 的优势和局限性】优势:1.考虑了交通信号灯、行人等多种交通元素,提高了规划的实时性和安全性。
apollo em planner解读随着自动驾驶技术的快速发展,路径规划成为了各大厂商研发的重点。
Apollo EM Planner作为一款优秀的路径规划工具,受到了广泛关注。
本文将对Apollo EM Planner进行解读,分析其核心功能、使用方法以及优缺点,为大家提供一个全面的了解。
一、Apollo EM Planner简介Apollo EM Planner,又称Apollo Path Planning,是百度Apollo平台的一部分。
它是一款基于强化学习的实时路径规划工具,可为自动驾驶汽车提供安全、高效的行驶路径。
Apollo EM Planner支持多种自动驾驶场景,如高速公路、城市道路等,可适应不同的道路条件和交通环境。
二、Apollo EM Planner的核心功能1.实时路径规划:Apollo EM Planner能够根据实时传感器数据,如激光雷达、摄像头等,对周边环境进行感知,并对当前车辆状态进行分析,生成一条安全、高效的行驶路径。
2.路径优化:Apollo EM Planner采用了基于强化学习的路径优化算法,使得生成的路径在满足安全性的同时,还能兼顾行驶效率。
3.动态障碍物避让:Apollo EM Planner能够实时检测周边动态障碍物,如其他车辆、行人等,并根据实际情况调整规划路径,确保行驶安全。
4.适应不同驾驶场景:Apollo EM Planner支持多种驾驶场景,如高速公路、城市道路等,可以根据不同场景调整路径规划策略,提高行驶效率。
三、如何使用Apollo EM Planner进行路径规划1.准备工作:首先,需要安装并配置Apollo SDK,以便调用Apollo Path Planning相关接口。
2.初始化环境:创建一个环境,包括地图、车辆模型、传感器等。
3.感知环境:使用激光雷达、摄像头等传感器,获取实时环境信息。
4.路径规划:调用Apollo Path Planning接口,输入实时环境信息,获取规划好的路径。