坐标转换原理
- 格式:ppt
- 大小:1.30 MB
- 文档页数:25
坐标转换原理资料坐标转换原理是地理信息系统(GIS)中的一项重要技术,用于将不同坐标系统的地理位置互相转换。
地球上的位置可以用不同的坐标系统来表示,比如经纬度、UTM坐标等。
由于不同坐标系统的起点、单位和方向等有所不同,因此需要进行坐标转换,以使不同坐标系统的地理位置信息能够互相匹配或比较。
1.地理坐标:地理坐标是以地球为参照物,用经度和纬度来表示地球表面上的点。
经度表示东西方向上的位置,以0°经线(本初子午线)为参照,当经度向东递增时,表示向东移动;纬度表示南北方向上的位置,以赤道为参照,纬度值越大,表示越接近北极。
通过经纬度可以准确地表示地球上的一个点,是地理信息的基础。
2.投影坐标:地球是一个三维椭球体,但为了进行地图绘制和分析,需要将其表面展开到一个二维平面上。
投影坐标就是在地图上使用的二维坐标系统,常见的有等经纬度、UTM(通用横轴墨卡托投影)、高斯克吕格投影等。
这些投影坐标系统都有其特定的映射规则和投影参数,用来将地球表面上的地理位置映射到地图上的坐标点。
3.数学模型:坐标转换需要使用一定的数学模型来进行计算,以实现从一个坐标系统到另一个坐标系统的转换。
常用的数学模型有直角坐标系转换模型、大地坐标系转换模型等。
这些数学模型基于空间几何学和大地测量学的原理,通过一系列公式和参数来实现坐标转换。
常见的坐标转换方法有以下几种:1.经纬度与投影坐标的转换:根据不同的地图投影方式,利用投影公式将经纬度坐标转换为投影坐标,或者反过来将投影坐标转换为经纬度坐标。
2.不同投影坐标之间的转换:根据不同的投影坐标系统的参数和公式,将一个投影坐标系下的坐标转换为另一个投影坐标系下的坐标。
3.不同大地坐标系之间的转换:不同大地坐标系(如WGS84、北京54等)之间的转换需要考虑椭球体的不同参数,利用大地测量学中的转换公式进行计算。
4.高程坐标的转换:高程坐标通常以海平面为基准,涉及大地水准面的计算,可以利用大地水准面的公式将高程坐标转换为相同或不同基准的高程坐标。
机器人坐标变换原理机器人坐标变换是机器人控制中的一个重要概念,它涉及到机器人在不同坐标系下的定位和运动控制。
机器人通常使用多个坐标系来描述其运动和操作,如世界坐标系、基座坐标系、工具坐标系等。
机器人坐标变换的原理基于坐标系之间的关系和变换矩阵的计算。
下面从多个角度来解释机器人坐标变换的原理。
1. 机器人坐标系,机器人通常由多个关节组成,每个关节都有自己的坐标系。
机器人的末端执行器也有自己的坐标系。
这些坐标系之间通过关节运动相互连接,形成了机器人的整体坐标系。
2. 坐标系关系,机器人的坐标系之间存在着一定的关系,如基座坐标系与世界坐标系之间的关系、工具坐标系与末端执行器坐标系之间的关系等。
这些关系可以通过变换矩阵来描述。
3. 变换矩阵,变换矩阵是用于描述坐标系之间关系的数学工具。
对于二维情况,变换矩阵是一个2x2的矩阵,对于三维情况,变换矩阵是一个4x4的矩阵。
变换矩阵包含了平移、旋转和缩放等变换信息。
4. 坐标变换过程,机器人坐标变换的过程可以分为两个步骤,前向变换和逆向变换。
前向变换是从基座坐标系到末端执行器坐标系的变换,逆向变换是从末端执行器坐标系到基座坐标系的变换。
5. 坐标变换公式,机器人坐标变换的公式可以通过矩阵乘法来表示。
对于前向变换,可以使用连续的变换矩阵相乘的方式计算末端执行器坐标系相对于基座坐标系的变换。
对于逆向变换,可以使用逆矩阵的方式计算基座坐标系相对于末端执行器坐标系的变换。
总结起来,机器人坐标变换的原理是基于坐标系之间的关系和变换矩阵的计算。
通过变换矩阵的乘法和逆矩阵的运算,可以实现机器人在不同坐标系下的定位和运动控制。
这种坐标变换的原理在机器人控制中起着重要的作用,能够帮助机器人实现复杂的任务和精确的定位。
坐标转换算法-回复坐标转换算法是指将一个坐标系统的坐标转换为另一个坐标系统的坐标的数学算法。
在地理信息系统(GIS)、地图投影以及导航系统等领域中,坐标转换算法起着关键作用。
本文将深入探讨坐标转换算法的原理、常用方法以及应用。
一、坐标转换算法的原理坐标转换算法的原理基于不同坐标系统之间的数学模型。
通过对坐标系统之间的关系进行建模,可以进行坐标的转换。
常见的坐标系统包括经纬度坐标系统、投影坐标系统等。
坐标转换算法可以将一个坐标系统中的点的坐标映射到另一个坐标系统中,实现不同坐标系统之间的相互转换。
二、常见的坐标转换方法1. 经纬度转换为投影坐标:在地理信息系统中,经纬度坐标通常以度(度、分、秒)表示。
而在实际应用中,经纬度坐标需要转换为平面坐标(如UTM坐标)或其他投影坐标系(如高斯-克吕格坐标系)。
这一转换通常基于地球表面的椭球体模型,利用椭球参数和投影参数进行计算。
2. 投影坐标转换为经纬度:当需要将平面坐标或其他投影坐标系转换为经纬度时,可以使用反向转换方法。
这需要用到与正向转换类似的椭球参数和投影参数进行计算,将平面坐标转换为经纬度坐标。
3. 不同投影坐标之间的转换:在不同的地图投影中,常常需要进行不同投影坐标之间的转换。
例如,将高斯-克吕格坐标系转换为墨卡托投影坐标系。
这一转换涉及到投影参数的转换,并且通常需要进行坐标轴的旋转和缩放。
4. 坐标系统之间的转换:除了不同投影系之间的转换外,还存在其他坐标系之间的转换,如大地坐标系与平面坐标系之间的转换。
这一转换通常需要考虑椭球的参数和坐标原点的偏移。
三、坐标转换算法的应用1. 地图投影:在地图制作中,常常需要将经纬度坐标转换为平面坐标系,以适应不同比例尺的地图。
坐标转换算法可以通过投影参数的转换,将经纬度转换为平面坐标,从而在地图上进行绘制和分析。
2. 导航系统:在导航应用中,通常需要将用户的当前位置坐标与目标位置坐标进行比较,以确定导航的路线和距离。
坐标变换和坐标系的平移坐标变换和坐标系的平移是数学中常见且重要的概念,它们在计算机图形学、物理学和工程学等领域中具有广泛的应用。
本文将介绍坐标变换和坐标系的平移的基本概念、原理和用途,以及如何进行坐标变换和坐标系的平移。
一、坐标变换的概念和原理坐标变换是一种将一个坐标系中的点的坐标转换到另一个坐标系中的点的坐标的过程。
在二维平面中,我们通常用x、y表示一个点在直角坐标系中的坐标。
当我们需要将一个点从一个坐标系转换到另一个坐标系时,我们需要知道两个坐标系之间的关系。
坐标变换的原理基于线性变换的基本原理。
在二维平面中,我们可以使用矩阵乘法来表示坐标变换。
假设有一个点P=(x, y)在坐标系A中的坐标,我们希望将其转换到坐标系B中。
那么我们可以使用一个2x2的矩阵M,表示从坐标系A到坐标系B的变换。
坐标变换的过程可以表示为:[P'] = [M] [P]其中[P']表示点P在坐标系B中的坐标。
矩阵M的每个元素表示了坐标系的缩放、旋转和错切等变换。
通过选择不同的矩阵M,我们可以实现不同的坐标变换效果。
二、坐标系的平移坐标系的平移是指在原有坐标系的基础上,将整个坐标系沿着某个方向平移一定的距离。
在二维平面中,我们可以将一个坐标系中的点的坐标表示为(x, y),将坐标系的平移表示为向量(t_x, t_y)。
那么在将点P从坐标系A平移到坐标系B时,我们可以使用以下公式进行计算:[P'] = [P] + (t_x, t_y)其中[P']表示点P在坐标系B中的坐标。
在这个过程中,不仅点的坐标发生了变化,整个坐标系也随之平移。
三、坐标变换和坐标系平移的应用坐标变换和坐标系的平移在计算机图形学、物理学和工程学等领域中具有广泛的应用。
它们可以用于处理图像的旋转、缩放和平移,实现图像的变换和变形。
在物理学中,坐标变换可以用于描述和计算粒子在不同坐标系中的运动和相互作用。
在工程学中,坐标变换可以用于处理三维模型的变换和显示。
坐标转换原理
空间直⾓坐标系:
坐标原点位于参考椭球的中⼼,Z轴指向参考椭球的北极,X轴指向起始⼦午⾯与⾚道的交点,Y轴位于⾚道⾯与X轴成90度夹⾓,并指向东构成右⼿系。
某点中的坐标可⽤该点在此坐标系各个坐标轴的投影来表⽰。
空间直⾓坐标系表⽰如下图所⽰:
⼤地坐标系:
以参考椭球⾯为基准⾯建⽴起来的坐标系。
地⾯点的位置⽤⼤地经度、⼤地纬度和⼤地⾼度表⽰。
经度B为过坐标点椭球⾯的法线与⾚道⾯交⾓,纬度L为过坐标点的⼦午线与起始⼦午线的夹⾓,H为点沿法线到椭球⾯的距离。
⼤地坐标系表⽰如下图所⽰:
坐标转换通常包含两层含义:坐标系转换和基准转换。
坐标系转换:就是在同⼀地球椭球下,空间点的不同坐标表⽰形式间进⾏变换。
包括⼤地坐标系与空间直⾓坐标系的相互转换以及⼤地坐标系与⾼斯平⾯坐标系的转换(即⾼斯投影正反算)。
基准转换:不同参考椭球⾯上的⼤地坐标系转换为空间直⾓坐标系后,坐标轴之间既不重合⼜不平⾏,因此需要在两个不同空间直⾓坐标系之间进⾏转换,其实质就是转换参数的求解过程。
可⽤空间的三参数或七参数实现不同椭球间空间直⾓坐标系或不同椭球见⼤地坐标系的转换。
坐标转换流程图如下所⽰:。
由大地坐标向空间直角坐标的转换的原理
大地坐标与空间直角坐标之间的转换原理是通过地理测量学中的大地坐标系统和空间直角坐标系统之间的数学关系来实现的。
在大地测量中,我们使用经度、纬度和大地高来描述地球表面上的点。
大地测量学中使用的经度是指一个点相对于地球自转轴的角度。
经度的起始点被定义为本初子午线,通常选择通过伦敦的经线作为本初子午线。
经度可取值范围为-180度到+180度。
纬度是指一个点相对于地球赤道面的角度。
纬度的起始点被定义为赤道,赤道的纬度为0度,北纬为正,南纬为负。
大地高是指一个点相对于地球平均海平面的高度。
空间直角坐标系统是使用直角坐标系来描述地球上的点。
在空间直角坐标系中,我们使用三个正交坐标轴来确定一个点的位置,分别是X轴、Y轴和Z轴。
通常,以经度0度、纬度0度、大地高0米的点作为原点。
要将大地坐标转换为空间直角坐标,我们需要进行以下计算:
1. 根据给定的经度和纬度,计算该点的地球半径R。
地球半径通常可以通过现有的地球模型来进行计算或查询相关资料获取。
2. 然后,通过以下公式计算该点相对于X轴、Y轴和Z轴的直角坐标值:
X = (R + H) * cos(纬度) * cos(经度)
H为大地高,e为地球的离心率。
地球的离心率是指地球形状的椭圆度,其数值在0-1之间,可以根据现有的地球模型进行计算。
计算得到的X、Y、Z值即为该点在空间直角坐标系中的坐标值。
通过以上的计算过程,我们可以将大地坐标转换为空间直角坐标。
这种转换过程在地理测量、导航定位等领域有着广泛的应用。
坐标变换原理
坐标变换是一种数学操作,用来在不同的坐标系间进行转换。
它是将一个点或对象的位置从一个坐标系转换到另一个坐标系的方法。
在二维平面坐标系中,通常使用笛卡尔坐标系和极坐标系。
笛卡尔坐标系使用x和y轴来表示一个点的位置,而极坐标系使用半径和角度来表示。
坐标变换可以通过简单的公式来实现:
1. 笛卡尔坐标系转换为极坐标系:给定一个点的笛卡尔坐标(x, y),可以通过以下公式计算其极坐标(r, θ):
r = √(x² + y²)
θ = arctan(y/x)
2. 极坐标系转换为笛卡尔坐标系:给定一个点的极坐标(r, θ),可以通过以下公式计算其笛卡尔坐标(x, y):
x = r * cos(θ)
y = r * sin(θ)
这些公式将一个点在不同坐标系中的位置进行相互转换。
通过这些转换,可以在不同坐标系之间准确地描述和定位对象的位置。
除了坐标系之间的转换,还可以进行其他类型的坐标变换,如平移、缩放和旋转。
在平移中,点的位置通过添加一个固定的偏移量来改变。
在缩放中,点的位置通过乘以一个缩放因子来改变。
在旋转中,点的位置通过应用旋转矩阵来改变。
通过这些坐标变换,可以单独或组合地对对象进行不同类型的变换,使其在平面内按照所需的方式移动、缩放和旋转。
这在计算机图形学和计算机视觉中经常使用,用于实现图像转换、模型变换等应用。
坐标变换为我们提供了一种非常有用的工具,可以方便地在不同坐标系中进行准确的位置描述与处理。
经纬度转化为xy坐标系公式经纬度是地球上任何一个点的位置坐标,而我们常用的地图则是平面的xy坐标系。
因此,经纬度与xy坐标系之间的转换就显得尤为重要。
以经纬度转化为xy坐标系公式为标题,本文将介绍经纬度与xy坐标系之间的转换原理与公式。
一、经纬度的基本概念经度是指地球上某个点与本初子午线之间的夹角,通常用东经和西经来表示。
西经表示为负数,东经表示为正数,范围为-180~180度。
纬度是指地球上某个点与赤道之间的夹角,通常用南纬和北纬来表示。
南纬表示为负数,北纬表示为正数,范围为-90~90度。
二、经纬度与xy坐标系的转换原理地球是一个球体,而平面的xy坐标系是二维的,因此需要将地球表面的经纬度转换为平面上的xy坐标系。
在转换时,需要先确定一个基准点,即将地球表面映射到平面上的点,通常选取的是正投影或者高斯投影。
然后,根据经纬度与基准点之间的距离和方向,可以计算出该点在xy坐标系中的坐标。
三、经纬度与xy坐标系的转换公式1. WGS84椭球体下的经纬度转XY坐标系需要将经纬度转换为弧度制,然后根据以下公式计算:X = R * cos(lat) * cos(lon)Y = R * cos(lat) * sin(lon)Z = R * sin(lat)其中,R为地球半径,lat为纬度,lon为经度。
将X和Y坐标平移,使得基准点在原点上,则有:x = X - X0y = Y - Y0其中,X0和Y0为基准点在xy坐标系中的坐标。
2. 高斯投影下的经纬度转XY坐标系高斯投影是一种常用的投影方式,它将地球表面划分成若干个带状区域,每个区域内的地图都可以使用一个平面直角坐标系来表示。
具体转换公式如下:X = N + k0 * E^2 * sin(2 * lat) / 2 + (k5 - k4 + k3 * cos(2 * lat) - k2 * cos(4 * lat) + k1 * cos(6 * lat)) * sin(lon - L0)Y = M + k0 * E^2 * sin(lat) * cos(lat) * (1 + E^2 * cos(lat)^2) / 2 + (k6 - k3 * cos(2 * lat) + k2 * cos(4 * lat) - k1 * cos(6 * lat)) * sin(2 * (lon - L0)) / 2其中,N和M为常数,E为椭球的偏心率,k0~k6为系数,L0为中央经线。
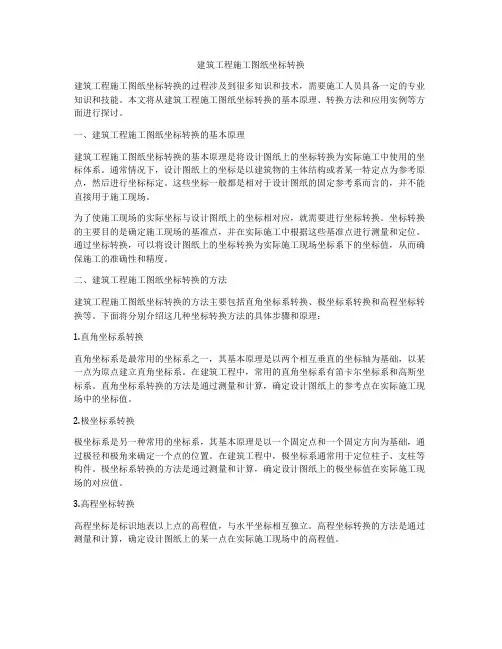
建筑工程施工图纸坐标转换建筑工程施工图纸坐标转换的过程涉及到很多知识和技术,需要施工人员具备一定的专业知识和技能。
本文将从建筑工程施工图纸坐标转换的基本原理、转换方法和应用实例等方面进行探讨。
一、建筑工程施工图纸坐标转换的基本原理建筑工程施工图纸坐标转换的基本原理是将设计图纸上的坐标转换为实际施工中使用的坐标体系。
通常情况下,设计图纸上的坐标是以建筑物的主体结构或者某一特定点为参考原点,然后进行坐标标定。
这些坐标一般都是相对于设计图纸的固定参考系而言的,并不能直接用于施工现场。
为了使施工现场的实际坐标与设计图纸上的坐标相对应,就需要进行坐标转换。
坐标转换的主要目的是确定施工现场的基准点,并在实际施工中根据这些基准点进行测量和定位。
通过坐标转换,可以将设计图纸上的坐标转换为实际施工现场坐标系下的坐标值,从而确保施工的准确性和精度。
二、建筑工程施工图纸坐标转换的方法建筑工程施工图纸坐标转换的方法主要包括直角坐标系转换、极坐标系转换和高程坐标转换等。
下面将分别介绍这几种坐标转换方法的具体步骤和原理:1.直角坐标系转换直角坐标系是最常用的坐标系之一,其基本原理是以两个相互垂直的坐标轴为基础,以某一点为原点建立直角坐标系。
在建筑工程中,常用的直角坐标系有笛卡尔坐标系和高斯坐标系。
直角坐标系转换的方法是通过测量和计算,确定设计图纸上的参考点在实际施工现场中的坐标值。
2.极坐标系转换极坐标系是另一种常用的坐标系,其基本原理是以一个固定点和一个固定方向为基础,通过极径和极角来确定一个点的位置。
在建筑工程中,极坐标系通常用于定位柱子、支柱等构件。
极坐标系转换的方法是通过测量和计算,确定设计图纸上的极坐标值在实际施工现场的对应值。
3.高程坐标转换高程坐标是标识地表以上点的高程值,与水平坐标相互独立。
高程坐标转换的方法是通过测量和计算,确定设计图纸上的某一点在实际施工现场中的高程值。
以上是建筑工程施工图纸坐标转换的基本方法,通过这些方法可以准确地将设计图纸上的坐标转换为实际施工现场的坐标系。
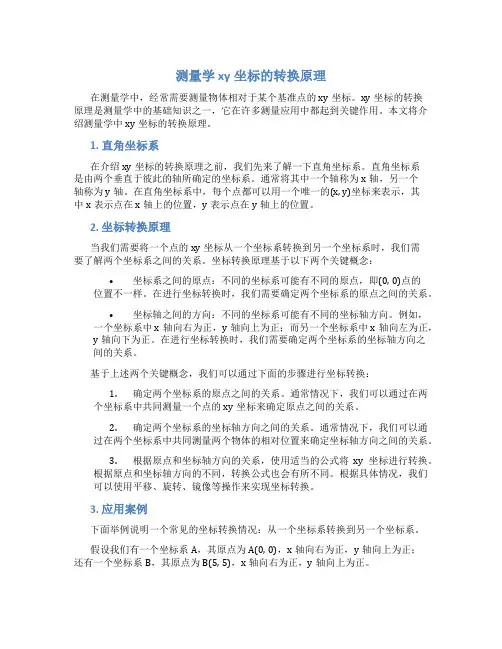
测量学xy坐标的转换原理在测量学中,经常需要测量物体相对于某个基准点的xy坐标。
xy坐标的转换原理是测量学中的基础知识之一,它在许多测量应用中都起到关键作用。
本文将介绍测量学中xy坐标的转换原理。
1. 直角坐标系在介绍xy坐标的转换原理之前,我们先来了解一下直角坐标系。
直角坐标系是由两个垂直于彼此的轴所确定的坐标系。
通常将其中一个轴称为x轴,另一个轴称为y轴。
在直角坐标系中,每个点都可以用一个唯一的(x, y)坐标来表示,其中x表示点在x轴上的位置,y表示点在y轴上的位置。
2. 坐标转换原理当我们需要将一个点的xy坐标从一个坐标系转换到另一个坐标系时,我们需要了解两个坐标系之间的关系。
坐标转换原理基于以下两个关键概念:•坐标系之间的原点:不同的坐标系可能有不同的原点,即(0, 0)点的位置不一样。
在进行坐标转换时,我们需要确定两个坐标系的原点之间的关系。
•坐标轴之间的方向:不同的坐标系可能有不同的坐标轴方向。
例如,一个坐标系中x轴向右为正,y轴向上为正;而另一个坐标系中x轴向左为正,y轴向下为正。
在进行坐标转换时,我们需要确定两个坐标系的坐标轴方向之间的关系。
基于上述两个关键概念,我们可以通过下面的步骤进行坐标转换:1.确定两个坐标系的原点之间的关系。
通常情况下,我们可以通过在两个坐标系中共同测量一个点的xy坐标来确定原点之间的关系。
2.确定两个坐标系的坐标轴方向之间的关系。
通常情况下,我们可以通过在两个坐标系中共同测量两个物体的相对位置来确定坐标轴方向之间的关系。
3.根据原点和坐标轴方向的关系,使用适当的公式将xy坐标进行转换。
根据原点和坐标轴方向的不同,转换公式也会有所不同。
根据具体情况,我们可以使用平移、旋转、镜像等操作来实现坐标转换。
3. 应用案例下面举例说明一个常见的坐标转换情况:从一个坐标系转换到另一个坐标系。
假设我们有一个坐标系A,其原点为A(0, 0),x轴向右为正,y轴向上为正;还有一个坐标系B,其原点为B(5, 5),x轴向右为正,y轴向上为正。
高斯经纬度到平面坐标的转换【原创版】目录1.高斯经纬度到平面坐标的转换原理2.高斯投影坐标系的定义和特点3.经纬度转高斯投影坐标的计算方法4.在 Excel 中将高斯坐标转换为经纬度的公式5.总结正文一、高斯经纬度到平面坐标的转换原理高斯经纬度到平面坐标的转换,主要是通过高斯投影坐标系来实现的。
高斯投影坐标系是一种将地球表面的经纬度坐标转换为平面直角坐标系的方法,其目的是为了在平面上更精确地表示地球表面的小面积区域。
在高斯投影坐标系中,地球表面的经纬度坐标(longitude, latitude)被转换为平面直角坐标(x, y)。
二、高斯投影坐标系的定义和特点高斯投影坐标系是一种圆锥投影坐标系,其特点是将地球表面的经纬度坐标转换为平面直角坐标,能够最大程度地保持地球表面的局部几何形状和角度。
在高斯投影坐标系中,地球表面的一个小区域被投影到一个圆锥面上,然后展开成一个平面。
这种投影方式在计算和测量地球表面上的小面积区域时,具有较高的精度和可靠性。
三、经纬度转高斯投影坐标的计算方法经纬度转高斯投影坐标的计算方法通常采用反演公式。
以经度为纵坐标(x),纬度为横坐标(y),投影区域为二维平面,反演公式如下:```x = lon * cos(lat)y = lat```其中,lon 表示经度,lat 表示纬度。
通过这个公式,可以将地球表面的经纬度坐标转换为高斯投影坐标系下的平面直角坐标。
四、在 Excel 中将高斯坐标转换为经纬度的公式在 Excel 中,可以使用 Excel 内置的函数进行高斯坐标到经纬度的转换。
以横坐标为 x,纵坐标为 y,投影区域为二维平面,转换公式如下:```=LAT(x,y,0,0)=LON(x,y,0,0)```其中,LAT 函数用于计算纵坐标(纬度),LON 函数用于计算横坐标(经度)。
五、总结高斯经纬度到平面坐标的转换,是通过高斯投影坐标系实现的。
在计算过程中,需要采用反演公式将经纬度坐标转换为高斯投影坐标系下的平面直角坐标。
五轴坐标转换的原理和方法
五轴坐标转换是将一个坐标系中的点转换到另一个坐标系中的过程,常用于机器人控制、计算机图形学等领域。
其原理和方法如下:
原理:
五轴坐标转换基于欧几里得几何的变换原理。
在三维空间中,一个点在不同坐标系中的表示是相对的,可以通过坐标系之间的变换矩阵来实现转换。
方法:
1. 平移变换:平移变换是将一个坐标系中的点沿着某个方向移动一定距离,可以通过平移矩阵实现。
平移矩阵的形式为:
[1 0 0 dx]
[0 1 0 dy]
[0 0 1 dz]
[0 0 0 1 ]
其中,dx、dy、dz分别表示在x、y、z方向上的平移量。
2. 旋转变换:旋转变换是将一个坐标系中的点绕某个轴旋转一定角度,可以通过旋转矩阵实现。
常见的旋转矩阵包括绕x轴旋转、绕y轴旋转和绕z轴旋转三种。
以绕x轴旋转为例,旋转矩阵的形式为:
[ 1 0 0 0 ]
[ 0 cosθ-sinθ0 ]
[ 0 sinθcosθ0 ]
[ 0 0 0 1 ]
其中,θ表示旋转角度。
3. 缩放变换:缩放变换是改变一个坐标系中点的尺寸大小,可以通过缩放矩阵实现。
缩放矩阵的形式为:
[Sx 0 0 0]
[0 Sy 0 0]
[0 0 Sz 0]
[0 0 0 1]
其中,Sx、Sy、Sz分别表示在x、y、z方向上的缩放比例。
通过以上三种基本变换,可以实现任意坐标系之间的转换。
通常,五轴坐标转换会涉及到平移、旋转和缩放的组合使用,根据需要确定变换矩阵并执行相应的数学计算即可完成转换。
直角坐标极坐标转换定理是什么直角坐标和极坐标是数学中用于描述点的坐标系统。
直角坐标系以x轴和y轴为基准,通过表示点的横纵坐标来确定点的位置。
而极坐标系以原点为基准,角度和半径来确定点的位置。
直角坐标极坐标转换定理是指将一个给定点的坐标从直角坐标系转换到极坐标系,或者从极坐标系转换到直角坐标系的数学原理和方法。
直角坐标系直角坐标系是二维平面上最常见的坐标系统。
在直角坐标系中,每个点都可以用其x坐标和y坐标表示,形式为(x,y)。
x轴是水平的,正方向向右;y轴是垂直的,正方向向上。
原点 (0,0) 位于x轴和y轴的交点。
每个点在直角坐标系中都有唯一的坐标,通过确定点相对于原点在x轴和y轴上的位置。
极坐标系极坐标系是另一种描述点位置的坐标系统。
在极坐标系中,点的位置由极径(半径)和极角表示。
极径是原点到点的距离,用正数表示。
极角是极径与极轴(通常为x轴)之间的角度,以度数或弧度表示。
直角坐标转换为极坐标要将直角坐标系中的一个点转换为极坐标系,我们可以利用一些基本的三角函数关系。
给定一个点的直角坐标 (x,y),我们可以计算该点的极径和极角。
极径的计算公式为:r = sqrt(x^2 + y^2)极角的计算公式为:θ = arctan(y / x)这里的arctan函数是反正切函数,返回的结果是弧度。
为了将弧度换算为度数,我们可以将结果乘以180 / π。
极坐标转换为直角坐标同样地,要将极坐标系中的一个点转换为直角坐标系,我们可以利用三角函数。
给定一个点的极坐标(r,θ),我们可以计算该点的直角坐标。
直角坐标的计算公式为:x = r * cos(θ)y = r * sin(θ)这里的cos和sin函数分别代表余弦和正弦函数,需要注意的是,这里的角度应该使用弧度制。
总结直角坐标极坐标转换定理描述了在直角坐标系和极坐标系之间转换坐标的原理和方法。
通过利用三角函数和基本的数学运算,我们可以将一个给定点的坐标从直角坐标系转换为极坐标系,或者反过来。
五轴坐标转换的原理
五轴坐标转换的原理是:
1. 建立坐标系统
首先需要建立参考基准坐标系和移动坐标系两个坐标系统。
参考坐标系通常固定不动,移动坐标系随机器移动而改变。
2. 确定初始位置关系
测量和确定移动坐标系相对于参考坐标系的初始位置和姿态关系。
3. 测量移动坐标系的实时位姿
通过编码器等设备实时测量移动坐标系在参考坐标系下的位移和姿态角。
4. 坐标转换
根据两坐标系之间的初始关系以及移动坐标系的实时位姿,通过矩阵变换算法计算出移动坐标系中的点在参考坐标系中的坐标表达。
5. 反解出控制量
根据目标点在参考坐标系中的坐标,反向转换和计算出移动坐标系需要移动到的位置或角度,作为控制系统的控制量。
6. 闭环控制
控制系统根据反解所得控制量Bring驱动执行机构移动,同时通过传感器反馈实时位姿信息,形成闭环控制,完成精确的五轴运动控制。
综上所述,五轴坐标转换的基本思路是建立双坐标系关系,通过矩阵变换实现两系统坐标转换和控制。
坐标转换技术的原理与实施坐标转换技术是一种广泛应用于测绘、地理信息系统(GIS)和导航系统等领域的技术。
它主要用于不同坐标系间的数据转换,以实现数据的统一和一致性。
在本文中,我们将探讨坐标转换技术的原理和实施,并介绍一些常见的坐标转换方法。
一、坐标转换的原理坐标转换的原理基于数学和几何学的基础。
坐标系统通常由坐标轴、坐标原点和度量单位组成。
不同的坐标系统可能使用不同的坐标轴方向和原点位置。
坐标转换的目标是通过一定的数学模型和算法,将一个坐标系统的坐标转换为另一个坐标系统的坐标。
在坐标转换过程中,通常需要考虑以下几个方面的内容:1.坐标轴方向:不同的坐标系统可能使用不同的坐标轴方向。
例如,某些系统使用东经和北纬作为坐标轴正向,而其他系统使用西经和南纬作为正向。
在转换时,需要将两个坐标系统的坐标轴方向进行对应。
2.坐标原点:不同的坐标系统可能使用不同的坐标原点。
例如,地心坐标系统的原点位于地球质心,而局部平面坐标系统的原点则位于某一特定地点。
在转换时,需要确定坐标原点的位置。
3.坐标单位:不同的坐标系统可能使用不同的度量单位。
例如,某些系统使用米作为长度单位,而其他系统使用英尺或千米。
在转换时,需要确保坐标的度量单位一致。
除了上述基本内容外,坐标转换还需要考虑椭球体参数、大地基准、投影方式等因素。
这些因素在不同的坐标系统中可能存在差异,需要进行适当的处理和转换。
二、坐标转换的实施坐标转换可以通过多种方式来实施,我们将介绍其中的一些常见方法。
1.基于三参数模型的转换:这是一种简单的坐标转换方法。
它通过平移、旋转和缩放三个参数来实现坐标的转换。
这种方法适用于局部区域的小范围坐标转换。
2.基于七参数模型的转换:这是一种更复杂的坐标转换方法,也被广泛应用于测绘和GIS领域。
它通过平移、旋转、缩放和斜切等七个参数来进行坐标转换。
这种方法适用于大范围、全局性的坐标转换。
3.基于投影的转换:在地理信息系统中,常常需要将球面上的地理坐标转换为平面上的投影坐标。
导航坐标转换原理
导航坐标转换是指将一个坐标系中的位置点或轨迹转换到另一个坐标系中的过程,常见的应用包括将地理坐标(纬度、经度)转换为平面坐标(东北坐标系)或将地理坐标转换为其他不同坐标系的表示方式。
其原理可以通过以下几个步骤来解释:
1.确定参考椭球体和参考坐标系:不同的国家和地区通常采
用不同的椭球体模型来描述地球形状,例如WGS84、北京
54等。
在坐标转换中,需要明确使用的参考椭球体和参考
坐标系。
2.数据预处理和准备:首先,获取原始数据,包括要转换的
位置点或轨迹的经纬度坐标。
同时,需要确定椭球体的参
数,如椭球体的扁率、椭球体的长半轴等。
这些参数用于
进行坐标转换的计算。
3.坐标变换公式:利用数学计算和大地测量的原理,根据选
定的参考椭球体和坐标系统,建立坐标变换公式。
该公式
可以将经纬度坐标转换为平面坐标或其他目标坐标系中的
表示形式。
4.转换计算:使用坐标变换公式,对原始数据进行计算,将
经纬度坐标转换为目标坐标系中的坐标。
这些计算可能涉
及纬度变换、经度变换、高程转换等。
5.验证和纠正:根据实际应用需求,对转换结果进行验证和
纠正。
可以利用已知的控制点或参考点进行验证,检查转
换后的坐标与参考坐标的差异,并进行必要的纠正。
在实际应用中,具体的坐标转换算法和公式因坐标系统的选择而异。
例如,UTM坐标转换通常使用横轴墨卡托坐标系,并引入不同的投影、缩放因子、高程修正等参数。
因此,在进行坐标转换时,应确保选择正确的参考椭球体和坐标系统,并根据实际需求采用相应的转换公式和参数。