182051_第五章 控制测量
- 格式:doc
- 大小:117.50 KB
- 文档页数:18


第五章控制测量第一节控制测量概述第二节导线测量外业观测第三节导线测量内业计算第四节高程控制测量第五节GPS全球定位测量系统第一节控制测量概述测量工作中,为统一坐标系统和限制误差的积累,应先进行控制测量,再进行碎部测量,这是测量的基本程序。
控制测量就是在测区中选定若干具有控制意义的点,用较高的精度测量出它们的平面位置(x、y )或高程(H)。
这些具有控制整体和全局意义的点称为控制点,它们按一定规律与要求组成网状几何图形,称为控制网;测定控制点平面位置或高程的工作,称为控制测量。
其中,测定控制点平面位置的工作,称为平面控制测量,测定控制点高程的工作,称为高程控制测量。
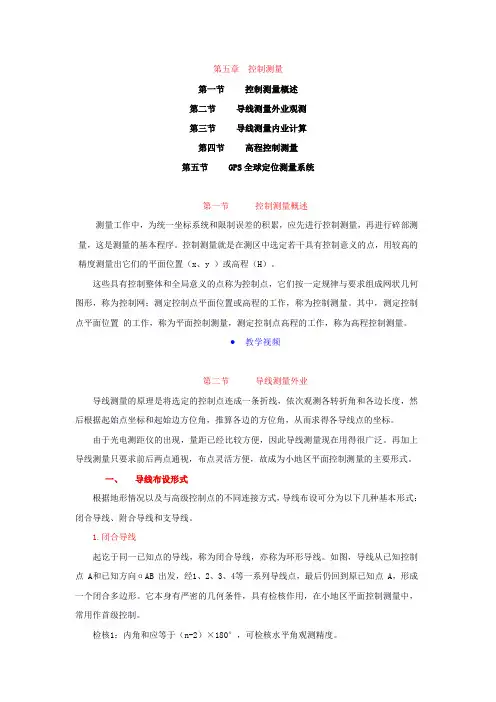
●教学视频第二节导线测量外业导线测量的原理是将选定的控制点连成一条折线,依次观测各转折角和各边长度,然后根据起始点坐标和起始边方位角,推算各边的方位角,从而求得各导线点的坐标。
由于光电测距仪的出现,量距已经比较方便,因此导线测量现在用得很广泛。
再加上导线测量只要求前后两点通视,布点灵活方便,故成为小地区平面控制测量的主要形式。
一、导线布设形式根据地形情况以及与高级控制点的不同连接方式,导线布设可分为以下几种基本形式:闭合导线、附合导线和支导线。
1.闭合导线起讫于同一已知点的导线,称为闭合导线,亦称为环形导线。
如图,导线从已知控制点 A和已知方向αAB 出发,经1、2、3、4等一系列导线点,最后仍回到原已知点 A,形成一个闭合多边形。
它本身有严密的几何条件,具有检核作用,在小地区平面控制测量中,常用作首级控制。
检核1:内角和应等于(n-2)×180°,可检核水平角观测精度。
检核2:X、Y的坐标增量分别之和应等于0,可检核水平距离观测精度。
2.附合导线布设在两已知控制点间的导线,称为附合导线。
如图,导线从已知控制点A和已知方向αAB出发,经1、2、3等一系列导线点,最后附合到另一已知控制点C和已知方向αCD上。
此种布设形式,也具有检核观测成果的作用,常用于平面控制测量的加密。
控制测量学教案范文教案:控制测量学一、教学目标:1.了解控制测量学的基本概念和意义;2.掌握控制测量学的基本理论和方法;3.能够应用控制测量学的知识解决实际问题。
二、教学内容:1.控制测量学的概念和意义;2.控制测量学的基本理论和方法;3.控制测量学在实际问题中的应用。
三、教学过程:1.授课导入(15分钟)1.1介绍控制测量学的概念和意义,引发学生对该知识的兴趣;1.2列举一些控制测量学的应用场景,向学生展示控制测量学的实际应用环境。
2.掌握控制测量学的基本理论和方法(40分钟)2.1介绍控制测量学的基本理论,如误差分析、精度评定等;2.2介绍控制测量学的基本方法,如测量系统的校准、调整和维护等;2.3使用案例进行实例演示,让学生能够理解和掌握控制测量学的具体操作方法。
3.应用控制测量学解决实际问题(40分钟)3.1选择一个实际问题,并与学生进行讨论;3.2引导学生思考如何运用控制测量学的知识来解决该问题;3.3让学生自主分组,并进行实际操作和实验研究;3.4学生将实验结果进行分析和总结,并向全班展示。
4.总结与评价(15分钟)4.1让学生总结本节课的重点内容和所掌握的知识;4.2对学生的实验报告进行评价,给予反馈意见和建议;4.3引导学生思考控制测量学在未来的应用前景,并进行讨论。
四、教学手段:1.授课讲解;2.实例演示;3.实验操作;4.讨论和展示。
五、教学资源:1.教学课件;2.实验设备和器材;3.案例材料。
六、教学评价:1.对学生的实验报告进行评价;2.学生的讨论参与度和分享情况;3.学生的课堂表现和学习反馈。
七、教学延伸:1.组织学生参加相关行业的实习活动,加深对控制测量学的认识和运用;2.鼓励学生进行科研项目的申报和参与,提高研究能力和创新意识;3.继续深入学习相关领域的知识,拓宽知识面,为未来的学习和工作打下坚实基础。
八、教学反思:通过本节课的教学,我发现学生对控制测量学的概念和意义还不够了解,需要更多的实例来进行说明和讲解。
《控制测量》教学教案一、教学目标1. 知识与技能:(1)理解控制测量的概念和意义;(2)掌握控制测量的方法和技术;(3)能够运用控制测量原理解决实际问题。
2. 过程与方法:(1)通过实例分析,培养学生对控制测量的认识;(2)通过实践操作,培养学生掌握控制测量的技能;(3)通过小组讨论,培养学生合作解决问题的能力。
3. 情感态度价值观:(1)培养学生对测量工作的兴趣和热情;(2)培养学生认真负责、细致严谨的工作态度;(3)培养学生团队协作、共同进步的精神。
二、教学内容1. 控制测量的概念及其重要性2. 控制测量的方法和技术3. 控制点的设置与标记4. 控制测量数据的采集与处理5. 控制测量在实际工程中的应用案例分析三、教学重点与难点1. 教学重点:(1)控制测量的概念和意义;(2)控制测量的方法和技术;(3)控制测量在实际工程中的应用。
2. 教学难点:(1)控制测量的方法和技术;(2)控制测量数据的采集与处理。
四、教学准备1. 教具:多媒体课件、控制测量仪器、控制点标志物等;2. 教材或教学资源:《控制测量学》、《测量学基础》等;3. 教学场地:实验室、实习基地或户外教学场所。
五、教学过程1. 导入新课:通过展示实际工程案例,引导学生了解控制测量在工程中的重要性,激发学生的学习兴趣。
2. 知识讲解:(1)讲解控制测量的概念及其重要性;(2)介绍控制测量的方法和技术;(3)讲解控制点的设置与标记方法。
3. 实践操作:(1)组织学生进行控制测量仪器的基本操作练习;(2)指导学生进行控制点设置与标记的实践操作;(3)讲解控制测量数据的采集与处理方法。
4. 案例分析:分析控制测量在实际工程中的应用案例,让学生理解控制测量在工程中的作用。
5. 课堂小结:6. 作业布置:布置一些有关控制测量实践操作的作业,巩固所学知识。
7. 课后反思:教师对本节课的教学效果进行反思,为下一步教学做好准备。
六、教学策略1. 采用“理论讲解+ 实践操作”相结合的教学模式,使学生在掌握理论知识的提高实际操作能力。
在一定区域内,为大地测量、摄影测量、地形测量或工程测量建立控制网所进行的测量。
包括:①平面控制测量,是为测定控制点平面坐标而进行的;②高程控制测量,为测定控制点高程而进行的;③三维控制测量,为同时测定控制点平面坐标和高程或空间三维坐标而进行的。
[1]在测区内,按测量任务所要求的K,测定一系列控制点的平面位置和高程,建立起测量控制网,作为各种测量的基础,这种测量工作称为控制测量。
在一定的区域内为地形测图或工程测量建立控制网(区域控制网)所进行的测量工作。
分为平面控制测量和高程控制测量。
平面控制网与高程控制网一般分别单独布设,也可以布设成三维控制网。
控制网具有控制全局,限制测量误差累积的作用,是各项测量工作的依据。
对于地形测图,等级控制是扩展图根控制的基础,以保证所测地形圉能互相拼接成为一个整体。
对于工程测量,常需布设专用控制网,作为施工放样和变形观测的依据。
编辑本段平面控制网常用三角测量、导线测量、三边测量和边角测量等方法建立。
三角测量三角测量是建立平面控制网的基本方法之一。
但三角网(锁)要求每点与较多的邻点相互通视,在隐蔽地区常需建造较高的觇标。
导线测量导线测量布设简单,每点仅需与前后两点通视,选点方便,特别是在隐蔽地区和建筑物多而通视困难的城市,应用起来方便灵活。
随着电磁波测距仪的发展,导线测量的应用日益广泛。
三边测量三边测量要求丈量网中所有的边长。
应用电磁波测距仪测定边长后即可进行解算。
此法检核条件少,推算方位角的精度较低。
编辑本段边角测量法边角测量法既观测控制网的角度,又测量边长。
测角有利于控制方向误差,测边有利于控制长度误差。
边角共测可充分发挥两者的优点,提高点位精度。
在工程测量中,不一定观测网中所有的角度和边长,可以在测角网的基础上加测部分边长,或在测边网的基础上加测部分角度,以达到所需要的精度。
小三角测量是在小测区建立平面控制网的一种方法,它多用于小测区的首级平面控制或三、四等三角网以下的加密,作为扩展直接用于地形测图的图根控制网(点)的基础。

第五章控制测量第一节控制测量概述第二节导线测量外业观测第三节导线测量内业计算第四节高程控制测量第五节GPS全球定位测量系统第一节控制测量概述测量工作中,为统一坐标系统和限制误差的积累,应先进行控制测量,再进行碎部测量,这是测量的基本程序。
控制测量就是在测区中选定若干具有控制意义的点,用较高的精度测量出它们的平面位置(x、y )或高程(H)。
这些具有控制整体和全局意义的点称为控制点,它们按一定规律与要求组成网状几何图形,称为控制网;测定控制点平面位置或高程的工作,称为控制测量。
其中,测定控制点平面位置的工作,称为平面控制测量,测定控制点高程的工作,称为高程控制测量。
●教学视频第二节导线测量外业导线测量的原理是将选定的控制点连成一条折线,依次观测各转折角和各边长度,然后根据起始点坐标和起始边方位角,推算各边的方位角,从而求得各导线点的坐标。
由于光电测距仪的出现,量距已经比较方便,因此导线测量现在用得很广泛。
再加上导线测量只要求前后两点通视,布点灵活方便,故成为小地区平面控制测量的主要形式。
一、导线布设形式根据地形情况以及与高级控制点的不同连接方式,导线布设可分为以下几种基本形式:闭合导线、附合导线和支导线。
1.闭合导线起讫于同一已知点的导线,称为闭合导线,亦称为环形导线。
如图,导线从已知控制点 A和已知方向αAB 出发,经1、2、3、4等一系列导线点,最后仍回到原已知点 A,形成一个闭合多边形。
它本身有严密的几何条件,具有检核作用,在小地区平面控制测量中,常用作首级控制。
检核1:内角和应等于(n-2)×180°,可检核水平角观测精度。
检核2:X、Y的坐标增量分别之和应等于0,可检核水平距离观测精度。
2.附合导线布设在两已知控制点间的导线,称为附合导线。
如图,导线从已知控制点A和已知方向αAB出发,经1、2、3等一系列导线点,最后附合到另一已知控制点C和已知方向αCD上。
此种布设形式,也具有检核观测成果的作用,常用于平面控制测量的加密。
3.支导线由一已知控制点和一已知方向出发,既不附合到另一已知控制点,又不回到原起始控制点的导线,称为支导线,亦称自由导线。
如图所示,A为已知控制点,αAB为已知方向,l、2为支导线点。
因支导线仅一端为已知点,则测角、量距发生错误时,无法进行检核,有关规范对其点数均有限制。
支导线一般只用于图根控制测量。
二、导线等级与技术要求导线测量和三角测量一样,也是分等级布设,按从整体到局部、从高精度到低精度的原则逐级布设。
不同的等级有不同的技术要求;同时,不同的等级满足不同的需要。
对小地区来说,一般分为基本控制测量和图根控制测量。
1.基本控制测量用导线测量方法建立平面控制网,当测区较小时,其基本控制测量等级一般为一级导线和二级导线。
一、二级导线应以已有的一、二、三、四等平面控制点为基础加密,其边长一般用光电测距仪测量,角度用DJ2 或DJ6 经纬仪测量,主要技术规定应符合下表的要求。
一、二级光电测距导线技术要求2.图根控制测量图根导线包括光电测距导线和钢尺量距导线,一般不超过两次附合,困难地区允许再发展一次,在无法布设附合导线和闭合导线的困难地段,可布设图根支导线,其长度不超过附合导线长度的一半,边数不超过三条,边长应往返测量,角度分别按左、右角各观测一测回,两者相加与其理论值360°的差值不超过±40″。
图根光电测距导线的主要技术规定应符合下表的要求,图根钢尺量距导线的主要技术规定与其相同,但边长测量误差改用往返丈量较差相对误差表示,其中,第一次附合要求达到1/8000,第二次附合要求达到1/4000。
图根光电测距导线技术要求三、导线测量外业导线测量外业主要包括踏勘选点、角度观测和边长观测。
1.踏勘选点选点前,应收集测区地形图和控制点成果等资料,根据测区范围、已知控制点分布和地形情况,拟定出导线布设的初步方案,然后到实地踏勘,现场核对、修改并确定导线点位。
如果测区没有地形图资料,则需要详细踏勘现场,尽量合理选定导线点位。
选点时应注意以下几点:(l)相邻导线点间,应通视良好,地势较平坦,便于测角量边;(2)导线边长应大致相等,尽量避免相邻边长相差悬殊,以保证和提高测角精度;(3)导线点应选在土质坚实处,便于保存标志和安置仪器,视野尽量开阔,便于扩展加密控制点和施测碎部;(4)导线点应有足够密度,分布应尽量均匀,便于控制整个测区。
测量标志点之记观测标志长期保存的控制点若为长期保存的控制点,则应埋设混凝土标石,中心钢筋顶面应刻有交叉线,其交点即为永久标志。
临时控制点若导线点属临时控制点,则只需在点位上打一木桩,桩顶面钉一小钉,其小钉几何中心即为导线点中心标志,混凝土标石木桩点之记导线点应统一编号。
为寻找方便,应绘出导线点与附近固定而明显的地物点的略图,并测量和标注其关系尺寸,作为“点之记”,如图所示,为N5的位置略图。
2.角度观测根据导线等级,按“一、二级光电测距导线技术”表或“图根导线技术要求”表中的要求,用相应等级的经纬仪观测导线角。
导线角位于前进方向左侧,称为左角;位于右侧,称为右角。
为计算方便和防止出错,应全部观测一个侧向的导线角,闭合导线中一般观测内角,附合导线中一般观测左角。
导线点一般只有两个方向,因此用测回法观测,个别多于两个方向的,用方向法观测。
在建筑物密集区域,受地物限制,导线边长较短,应特别注意经纬仪和目标的对中。
左角与右角的区分导线角位于前进方向左侧,称为左角;位于右侧,称为右角。
连接角观测导线与高级控制点连接处,需观测连接角,用于传递坐标方位角。
若导线中有一个点为已知的高级点,则只需观测一个连接角即可3.边长观测导线边长一般用光电测距仪或全站仪直接测定,图根导线的边长也可用钢尺直接丈量。
(请点击小图)光电测距仪测距光电测距所使用的测距仪的精度等级,以制造厂家给定的1km的测距中误差m0的绝对值划分为下列三个等级,测距时,应使用相应精度等级的测距仪。
Ⅰ级:│m0│≤5mmⅡ级:5mm<│m0│≤10mmⅢ级:10mm<│m0│≤20mm全站仪测距钢尺量距钢尺量距时,应使用检定过的30m或50m钢尺,往返各丈量一次或同一方向丈量两次,取其平均值,其往返丈量较差相对误差,应满足图根钢尺量距导线的主要技术规定要求。
当尺长改正数超过1/10000时,应加尺长改正;量距时平均尺温与检定时温度相差±10℃以上时,应进行温度改正;尺面倾斜超过2%时,应进行倾斜改正。
第三节导线测量内业计算导线测量内业计算的目的,是根据起算数据和外业观测成果,推算出导线点坐标。
计算前应全面检查观测成果,若发现错误应及时重测,保证观测成果的正确性。
下面先介绍计算导线坐标的基本公式,然后介绍导线计算的基本过程与方法。
这部分内容计算过程较多,弄懂这些基本计算方法,不但可以解决这里所涉及的导线计算问题,还有助于施工测量及整个测量课程的学习。
一、坐标计算的基本公式坐标计算的基本公式,是指在平面直角坐标系中,根据已知点坐标和有关方位角与边长,计算另一个点的坐标,或者根据两个点的已知坐标,计算两点之间的方位角和边长。
前者称为坐标正算,后者称为坐标反算。
1.坐标正算根据已知点坐标、已知边长和坐标方位角,计算未知点坐标,称为坐标正算,是计算导线坐标的主要公式。
2.坐标反算根据两点平面直角坐标计算边长和坐标方位角,称为坐标反算。
在导线测量中,当导线与高级控制点连接时,高级控制点的坐标是已知的,其方位角和边长则要通过坐标反算来获得,与坐标一起,作为导线计算的起算数据或检核数据。
3.在计算器中如何输入输出角度(1)角度输入在含有角度的计算中,在用计算器计算时,需要输入带“度、分、秒”的角度值,再进行、减或三角函数运算。
常见的具有角度输入功能的计算器有两种:第一种键盘上有[DEG]键,可把角度值由“度、分、秒”转换为“度”,例如输入276°36′48″的操作是:276.3648[DEG],屏幕上显示:“276.613333”表示276.613333°例如:cos168°07′08″键入:276.0708[DEG][cos]58°43′54″+95°33′26″键入:58.4354[DEG]+95.3326[DEG]注意:输入输出角度时,检查屏幕上是否有“DEG”字符,如有说明计算器处于我国常用的360°制;如没有,请按[DRG]键使之出现。
(1)角度输入第二种键盘上有[°′″]或[DMS]键,可直接输入“度、分、秒”例如输入276°36′48″的操作是:276[°′″]36[°′″]48[°′″](2)角度输出第一种 [DEG]键的上方有第二功能键[DMS],可把角度值由“度”转换为“度、分、秒”。
注:按[2ndF][DEG]等于[DMS]。
例如键入:276.613333[2ndF][DEG],屏幕上显示:276.3648,表示276°36′48″。
再如求反正切函数:arctg1.564826,键入:1.564826[2ndF][TAN][2ndF][DEG],显示57.2510,表示57°25′10″4.象限角与坐标方位角的关系用计算器按反三角函数计算坐标方位角时,显示的结果是象限角R,应将其转换为方位角。
象限角是以北或南为标准方向,直线与标准方向之间的夹角。
R值在-90°至90°之间应先根据坐标增量的正负来判断此直线处在哪个象限,再将R换算为方位角。
以起始点为原点画一个坐标系的草图,如图所示,可以直观方便地判断所处象限,规律如下:当ΔxAB、ΔyAB均为正时,在第一象限,αAB = R ;当ΔxAB、ΔyAB均为负时,在第三象限,αAB = 180°+ R ;当ΔxAB为负、ΔyAB为正时,在第二象限,αAB = 180°+ R (此时R为负值);当ΔxAB为正、ΔyAB为负时,在第四象限,αAB = 360°+ R (此时R为负值)。
二、支导线计算由上述基本公式可知,若知道了每条边的方位角和边长,便可用坐标正算公式求出每相邻两个点之间的坐标增量,再根据第一点的已知坐标,依次推算出其它各点的坐标。
对支导线来说,边长可以通过观测直接获得,方位角可以通过观测转折角后用方位角推算公式间接获得,1.各导线边的坐标方位角推算第一条边的方位角计算:该边与已知方向αAB是角度增加关系,有αA1 =αAB + βA= 57°59′30″ + 99°01′00″= 157°00′30″第二条边的方位角计算:先求第一条边的反方位角(+ 180°),再增减1号点的转折角,由于该转折角是左角,方位角推算为α12 =α12 + 180° + β1= 157°00′30″+180°+167°45′36″= 504°46′06″(-360°)= 144°46′06″结果αA1=157°00′30″α12=144°46′06″2.各导线边的坐标增量计算第一条边的坐标增量计算:Δx A1=D A1×cosαA1=225.85×cos157°00′30″ =-207.91mΔy A1=D A1×sinαA1=225.85×sin157°00′30″ =88.22m第二条边的坐标增量计算:Δx12=D12×cosα12=139.03×cos144°46′06″ =-113.56mΔy12=D12×sinα12=139.03×sin144°46′06″=80.20mΔx A1=-207.91mΔy A1=88.22mΔx12=-113.56mΔy12=80.20m3.各导线点的坐标计算第一点的坐标计算:x1= x A+Δx A1=2517.69-207.91=2309.78my1=y A+Δy A1=1215.63+88.22=1303.85m第二点的坐标计算:x2= x1+Δx12=2309.78-113.56=2196.22my2=y1+Δy12=1303.85+80.20=1384.05m三、闭合导线计算1.计算总原则在实际测量工作中,角度观测和边长观测均有误差存在,甚至会出现错误。