相位滞后校正
- 格式:ppt
- 大小:8.82 MB
- 文档页数:17
机电控制工程基础作业4一、判断题1.PI校正为相位滞后校正。
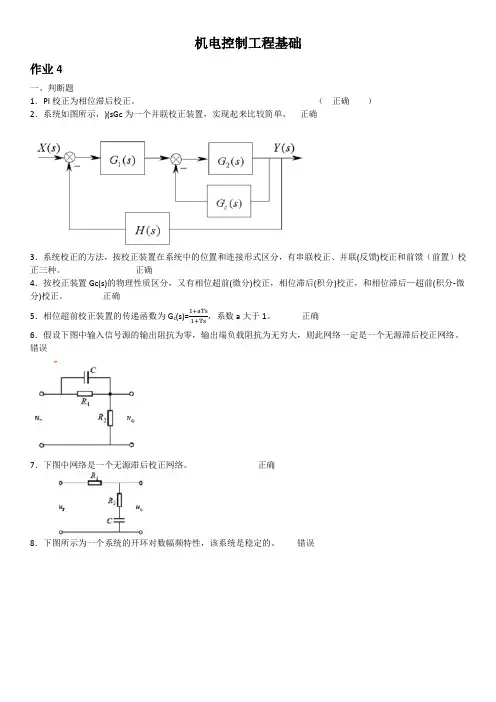
(正确)2.系统如图所示,)(sGc为一个并联校正装置,实现起来比较简单。
正确3.系统校正的方法,按校正装置在系统中的位置和连接形式区分,有串联校正、并联(反馈)校正和前馈(前置)校正三种。
正确4.按校正装置Gc(s)的物理性质区分,又有相位超前(微分)校正,相位滞后(积分)校正,和相位滞后—超前(积分-微分)校正。
正确5.相位超前校正装置的传递函数为G c(s)=,系数a大于1。
正确6.假设下图中输入信号源的输出阻抗为零,输出端负载阻抗为无穷大,则此网络一定是一个无源滞后校正网络。
错误7.下图中网络是一个无源滞后校正网络。
正确8.下图所示为一个系统的开环对数幅频特性,该系统是稳定的。
错误9.利用相位超前校正,可以增加系统的频宽,提高系统的快速性,但使稳定裕量变小.错误10.滞后-超前校正环节的传递函数的一般形式为:G c(s)=,式中a>1,b<1且bT1>aT2。
正确。
二、单项选择题1、惯性环节和积分环节的频率特性在(A )上相等。
A、幅频特性的斜率B、最小幅值C、相位变化率D、穿越频率2、ω从0变化到+∞时,延迟环节频率特性极坐标图为(A)。
A.圆B.半圆C.椭圆D.双曲线3、一阶微分环节G(s)=1+Ts,当频率ω=1/T时,则相频特性∠G(jω)为(A )A.45°B.-45°C.90°D.-90°4最小相位系统的开环增益越大,其( D )A.振荡次数越多B.稳定裕量越大C.相位变化越小D.稳态误差越小、5、某校正环节传递函数G(s)=,则其频率特性的奈氏图终点坐标为(D )A.(0,j0)B.(1,j0)C.(1,j1)D.(10,j0)6、一般开环频率特性的低频段表征了闭环系统的(B )性能。
A.动态B.稳态C.稳定性D.快速性7、某环节的传递函数为K/(Ts+1),它的对数幅频率特性L(ω)随K值增加而(A )A.上移B.下移C.左移D.右移8、设积分环节的传递函数为G(s)=K/S,则其频率特性幅值A(ω)=(A )A./ωB. K/ω21/ω D. 1/ω29、在转折频率附近,二阶振荡环节对数幅频特性将出现谐振峰值,其大小和(A )有关。

基于伯德图的相位滞后校正1.相位滞后校正装置及其传递函数(1) 所有频率下相频特性为负值(滞后) ⑵ 当b 确定后,在(w >1/(bT )后的最大幅值衰减为 L =20lg b2.基于伯德图的滞后校正方法ωωβωϕT tg T tg 11)(---=滞后校正的主要作用是在中高频段造成衰减,从而使系统获得足够的相位裕量。
G c 为校正装置,G 为对象。
① 求出满足稳态性能指标的开环增益K 值;② 根据求出的K 值,画出校正前的Bode 图,确定此时的幅值穿越频率w c 1和相位裕量g 1;③ 选择一新的幅值穿越频率点w c 2,使得在w = w c 2处原系统的相位滞后此式实际就是由相角裕量定义式得到g 0 为系统期望的相角裕量。
④ 求出校正网络中的b 值。
为使校正后系统的幅值穿越频率为w c 2,必须把原系统在w c 2的幅值L (w c 2)衰减到0dB ,即当相位滞后校正网络起作用后应使得⑤ 选择校正网络零点理论上 选得越小越好,但物理实现带来具体困难,所以一般选 在w c 2的 倍频处即可当 确定后, 也可确定于是⑥ 画出校正后的Bode 图,确定此时的幅值穿越频率w c 2和相位裕量g 2,校验系统的性能指标。
一定要校验,不满足重做。
⑦ 求出校正装置的参数 相位滞后校正对系统的影响和限制影响:① 改善了系统的相位裕量g ,提高了系统的相对稳定性;② 上升时间等增大,降低了系统的快速性;③ 高频衰减相对增强,有利于抑制高频干扰T β1T 1Ts Ts s G c ++=11)(βTs Ts s G c ++=11)(β)12~5(180)(02︒︒++︒-=γωϕc )(18020c ωϕγ+︒=0)(lg 202=+c L ωβ)(lg 202c L ωβ-=20)(210c L ωβ-=2)101~21(1c T ωβ=101~21T β1•限制:当系统在低频段相频特性上找不到满足系统相位裕量点时,不能用相位滞后校正。
串联超前校正和滞后校正的不同之处在控制系统中,超前校正和滞后校正是两种常见的校正方法。
它们都是为了提高系统的稳定性和性能而采取的措施。
然而,它们的实现方式和效果却有很大的不同。
本文将从理论和实践两个方面,分别探讨串联超前校正和滞后校正的不同之处。
一、理论分析1. 超前校正超前校正是指在控制系统中,通过提前控制信号的相位,使得系统的相位裕度增加,从而提高系统的稳定性和响应速度。
具体来说,超前校正是通过在控制信号中加入一个比例项和一个积分项,来提高系统的相位裕度。
这样,系统就能更快地响应外部干扰和变化,从而提高系统的性能。
2. 滞后校正滞后校正是指在控制系统中,通过延迟控制信号的相位,使得系统的相位裕度减小,从而提高系统的稳定性和抗干扰能力。
具体来说,滞后校正是通过在控制信号中加入一个比例项和一个微分项,来减小系统的相位裕度。
这样,系统就能更好地抵抗外部干扰和变化,从而提高系统的性能。
二、实践应用1. 超前校正超前校正在实践中的应用非常广泛。
例如,在电力系统中,超前校正可以用来提高电力系统的稳定性和响应速度。
在机械控制系统中,超前校正可以用来提高机械系统的精度和响应速度。
在化工生产中,超前校正可以用来提高化工生产的稳定性和生产效率。
2. 滞后校正滞后校正在实践中的应用也非常广泛。
例如,在飞行控制系统中,滞后校正可以用来提高飞行器的稳定性和抗干扰能力。
在汽车控制系统中,滞后校正可以用来提高汽车的稳定性和安全性。
在医疗设备中,滞后校正可以用来提高医疗设备的精度和稳定性。
总之,串联超前校正和滞后校正是两种常见的校正方法,它们都是为了提高系统的稳定性和性能而采取的措施。
然而,它们的实现方式和效果却有很大的不同。
在实践中,我们需要根据具体的应用场景和需求,选择合适的校正方法,以达到最佳的控制效果。
串联相位滞后校正的特点
相位滞后校正是一种常见的校正方法,它通常用于电子领域进行信号处理和调制。
由于电路中存在着一些不可避免的相位滞后,导致信号的失真和噪声,因此需要进行相应的校正处理,以确保信号的精确传递和处理。
串联相位滞后校正是一种相位校正方法,具有特别的作用和优势。
下面,我们将从以下几个方面来探究它的特点: 第一,串联相位滞后校正实现简单,操作容易。
该方法依靠串联多个相位校正器,以逐级消除信号中的相位滞后,达到最终的校正效果。
由于该方法采用串联的方式,因此操作上比较简单,只需要将相位校正器一级接一级进行连接,即可完成校正过程。
第二,串联相位滞后校正具有高精度和稳定性。
由于该方法是通过多级串联相位校正器进行处理,因此可以逐步消除信号中的相位滞后,最终达到高精度的校正效果。
同时,该方法具有稳定性,可以在不同的工作环境下保持一致的校正效果,有效提高信号处理的准确度和可靠性。
第三,串联相位滞后校正适用范围广泛。
相位滞后影响信号的传递和处理,不仅在电子领域中存在,也在其他领域有着广泛的应用。
串联相位滞后校正方法适用于各种不同的信号处理和调制需要,如音频和视频信号处理、光学通信等领域。
第四,串联相位滞后校正具有灵活性和可拓展性。
由于串联相位滞后校正器的多个级别,可以根据不同的信号处理要求调整校正器的数量,以实现更高的校正精度和处理能力。
同时,该方法也可以通过添加更多的级别来扩展其校正范围和适用性能。
综上所述,串联相位滞后校正是一种基于多级相位校正器串联的相位校正方法,具有操作简单、高精度、稳定性强、适用范围广、可拓展性等特点,在信号处理和调制领域有着广泛的应用。
相位超前和滞后在控制系统中的作用如下:
1. 超前校正:目的是改善系统的动态性能,在系统静态性能不受损的前提下,提高系统的动态性能。
通过加入超前校正环节,利用其相位超前特性来增大系统的相位裕度,改变系统的开环频率特性。
一般使校正环节的最大相位超前角出现在系统新的穿越频率点。
2. 滞后校正:通过加入滞后校正环节,使系统的开环增益有较大幅度增加,同时又使校正后的系统动态指标保持原系统的良好状态。
它利用滞后校正环节的低通滤波特性,在不影响校正后系统低频特性的情况下,使校正后系统中高频段增益降低,从而使其穿越频率前移,达到增加系统相位裕度的目的。
3. 滞后-超前校正:是滞后校正与超前校正的组合。
它具有超前校正的提高系统相对稳定性和响应快速性;同时又具有滞后校正的不影响原有动态性能的前提下,提高系统的开环增益,改善系统的稳定性能。
它具有低频端和高频端频率衰减的特性,故又称带通滤波器。
这种校正方式适用于对校正后系统的动态和静态性能有更多更高要求的场合。
基于根轨迹的相位滞后校正概述:控制系统的根轨迹是当开环系统的某一参数(一般为系统的开环增益)从负无穷到正无穷变化时,闭环系统特征方程的根在复平面上留下的轨迹。
根轨迹分析方法就是利用绘制出的根轨迹来分析闭环系统稳定性和其他性能指标的方法。
基于根轨迹的控制系统的设计:当系统的性能指标以时域指标提出时,可以借助根轨迹曲线获取校正装置的结构和参数。
因为系统期望的闭环主导极点往往不在被控对象的根轨迹曲线上,所以需要添加一对零极点,来改变系统的根轨迹曲线。
若期望主导极点在原根轨迹的左侧,则采用相位超前校正;若期望主导极点在原根轨迹上,则通过调整K 值,以满足静态性能要求;若期望主导极点在原根轨迹的右侧,则采用相位之后校正。
具体步骤如下:第一步:对被控对象(即未校正系统)进行性能分析,确定使用何种校正装置。
第二步:根据性能指标的要求,确定期望的闭环主导极点。
第三步:确定校正系统的参数c Z 和c P ,写出其传递函数c G =KcPc s Zc s ++。
第四步:绘制根轨迹图,确定Kc 。
第五步:对校正后的系统进行性能校验。
基于根轨迹的相位滞后校正:1、基于根轨迹的相位滞后校正基本原理:设未校正系统的开环传递函数为0G (S),校正系统的传递函数为c G =11++Ts Ts ββ>1),则校正系统的开环传递函数为G (s )=G0(s )c G (s );设S1为期望的闭环主导极点,因此S1应满足系统的特征方程1+0G (s )c G (s )=0;由于是滞后校正,校正装置的零极点相对于S1来说应是一对偶极子,而且离虚轴越近越好。
因此,当S=S1时,校正装置的零极点可以看作是一对偶极子,所以有ββββ111111)(11111≈++=++=T s T s Ts Ts s Gc (1-1) 记)(100s G M =,)(1s G M c c =,则 1100==βM M M c (1-2)2、基于根轨迹的相位滞后校正步骤:第一步:由稳态指标确定未校正系统的开环增益,对未校正系统进行性能分析。
说明相位超前和相位滞后校正的各自特点
相位超前和相位滞后校正是相位校正技术中常用的两种方法,它们各有其特点。
相位超前是一种电力系统调度中常用的方法,其目的在于改善相位不平衡的紊
乱状态。
它的主要思想是通过改变某一节点的电压相位,使得系统设备各自的相位组合恢复到正确的相位平衡状态。
它的特点是,它只能用于调节相位不平衡的节点,而不能用于调节全局的相位不平衡问题。
另一种常用的相位校正方法是相位滞后校正法,它也称为纵向相位调整,它将
节点之间的电压相位关系作为一个阶段。
它的特点是,它可以用于调节全局的电压相位不平衡,也可以用于调节相位不平衡的节点。
它的优点是,它不仅可以提高系统的发电能力,而且可以改善系统的负荷调度效率。
总之,相位超前和相位滞后校正是相位校正技术中重要的两种方法,它们各有
其特点和优势。
它们的正确使用和操作可以改善系统的负荷调度能力和发电能力,从而提高系统的运行稳定性和安全性,保证用电安全。
相位超前校正和滞后校正的区别相位超前校正和滞后校正是电路中常用的两种方法,用于调整信号的相位。
它们在电子领域中具有重要的应用,尤其在通信系统和控制系统中起着至关重要的作用。
本文将详细介绍相位超前校正和滞后校正的区别。
一、相位超前校正相位超前校正是一种使信号相位提前的技术。
在电路中,我们常常遇到信号相位滞后或者信号延迟的情况,这是由于电路元件的特性或者传输介质的影响所致。
为了解决这个问题,我们可以采用相位超前校正的方法。
相位超前校正的原理是在信号路径中引入一个或多个滤波器,并通过合理设计滤波器的参数,使得滤波器对频率较低的信号具有较大的增益,从而使得信号的相位提前。
相位超前校正常用于控制系统中,以提高系统的稳定性和响应速度。
例如,在飞机的自动驾驶系统中,采用相位超前校正可以使飞机更加稳定地飞行。
二、滞后校正滞后校正则是一种使信号相位延迟的技术。
在某些情况下,我们需要延迟信号的相位,以满足特定的要求。
比如,在音频处理中,我们可能需要将不同的音频信号进行时间对齐,以达到更好的音效效果。
此时,我们可以采用滞后校正的方法来实现。
滞后校正的原理是通过引入一个或多个滤波器,在信号路径中对频率较高的信号进行衰减,从而使得信号的相位发生延迟。
滞后校正常用于音频处理、图像处理等领域,以实现信号的同步和对齐。
例如,在音频混音中,我们可以采用滞后校正的方法,将不同音轨的信号进行时间对齐,以获得更好的混音效果。
三、相位超前校正与滞后校正的区别相位超前校正和滞后校正的区别主要体现在以下几个方面:1. 目的不同:相位超前校正的目的是使信号的相位提前,以提高系统的稳定性和响应速度;滞后校正的目的是使信号的相位延迟,以实现信号的同步和对齐。
2. 原理不同:相位超前校正通过引入滤波器来增益低频信号,从而使得信号的相位提前;滞后校正通过引入滤波器来衰减高频信号,从而使得信号的相位延迟。
3. 应用领域不同:相位超前校正主要应用于控制系统中,以提高系统的稳定性和响应速度;滞后校正主要应用于音频处理、图像处理等领域,以实现信号的同步和对齐。
滞后校正的原理
滞后校正是一种用于修正系统响应滞后的方法,常用于控制系统中。
其原理基于对系统的输出信号进行滞后处理,在时间上对信号进行一定的延迟,以使系统的响应更加准确、稳定。
滞后校正的原理是通过引入一个滞后补偿器来改变控制系统的传递函数。
滞后补偿器由一个或多个衰减器和一个延迟器组成。
衰减器可以减小信号的振幅,而延迟器可以延迟信号的相位。
具体来说,当系统的响应滞后时,可以通过增加延迟器的时间常数来减小滞后。
延迟器会导致系统的相位响应滞后,并减弱系统的频率响应。
通过在系统的传递函数中引入延迟器,可以使系统的相位响应向后移动,从而达到校正滞后的效果。
实际上,滞后校正可以看作是一种频率域设计方法,通过调整系统的频率响应曲线,使其更加接近期望的频率响应。
在控制系统中应用滞后校正可以提高系统的稳定性和响应速度。
总之,滞后校正通过引入延迟器来改变系统的传递函数,从而校正系统响应中的滞后现象。
这种方法可用于改善控制系统的稳定性和响应特性,使系统的性能更加优良。