自动控制原理-相位超前校正
- 格式:ppt
- 大小:5.87 MB
- 文档页数:19

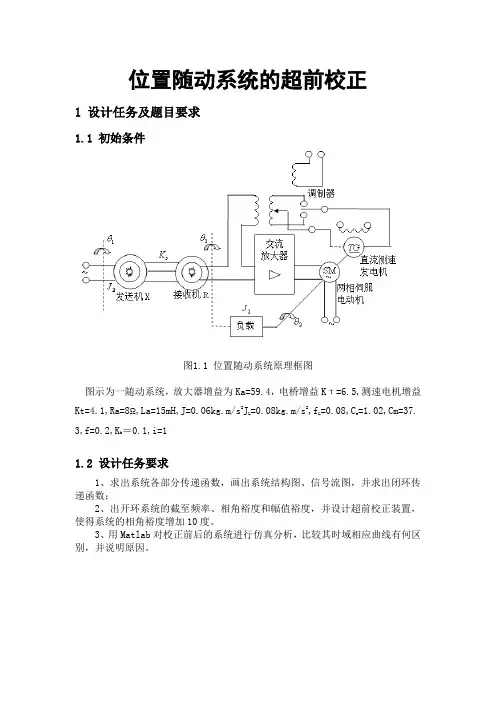
位置随动系统的超前校正1 设计任务及题目要求1.1 初始条件图1.1 位置随动系统原理框图图示为一随动系统,放大器增益为Ka=59.4,电桥增益Kτ=6.5,测速电机增益Kt=4.1,Ra=8Ω,La=15mH,J=0.06kg.m/s2JL =0.08kg.m/s2,fL=0.08,Ce=1.02,Cm=37.3,f=0.2,Kb=0.1,i=11.2 设计任务要求1、求出系统各部分传递函数,画出系统结构图、信号流图,并求出闭环传递函数;2、出开环系统的截至频率、相角裕度和幅值裕度,并设计超前校正装置,使得系统的相角裕度增加10度。
3、用Matlab对校正前后的系统进行仿真分析,比较其时域相应曲线有何区别,并说明原因。
2 位置随动系统原理2.1 位置随动系统工作原理工作原理:该系统为一自整角机位置随动系统,用一对自整角机作为位置检测元件,并形成比较电路。
发送自整角机的转自与给定轴相连;接收自整角机的转子与负载轴(从动轴)相连。
TX 与TR 组成角差测量线路。
若发送自整角机的转子离开平衡位置转过一个角度1θ,则在接收自整角机转子的单相绕组上将感应出一个偏差电压e u ,它是一个振幅为em u 、频率与发送自整角机激励频率相同的交流调制电压,即sin e em u u t ω=⋅在一定范围内,em u 正比于12θθ-,即12[]em e u k θθ=-,所以可得12[]sin e e u k t θθω=-这就是随动系统中接收自整角机所产生的偏差电压的表达式,它是一个振幅随偏差(12θθ-)的改变而变化的交流电压。
因此,e u 经过交流放大器放大,放大后的交流信号作用在两相伺服电动机两端。
电动机带动负载和接收自整角机的转子旋转,实现12θθ=,以达到跟随的目的。
为了使电动机转速恒定、平稳,引入了测速负反馈。
系统的被控对象是负载轴,被控量是负载轴转角2θ,电动机施执行机构,功率放大器起信号放大作用,调制器负责将交流电调制为直流电供给直流测速发电机工作电压,测速发电机是检测反馈元件。
超前校正环节的设计一、课设的课题已知单位反馈系统开环传递函数如下:()()()10.110.3O kG s s s s =++试设计超前校正环节,使其校正后系统的静态速度误差系数6v K ≤,相角裕度为45度,并绘制校正前后系统的单位阶跃响应曲线,开环Bode 图和闭环Nyquist 图。
二、课程设计目的1. 通过课程设计使学生更进一步掌握自动控制原理课程的有关知识,加深对内涵的理解,提高解决实际问题的能力。
2. 理解自动控制原理中的关于开环传递函数,闭环传递函数的概念以及二者之间的区别和联系。
3. 理解在自动控制系统中对不同的系统选用不同的校正方式,以保证得到最佳的系统。
4. 理解在校正过程中的静态速度误差系数,相角裕度,截止频率,超前(滞后)角频率,分度系数,时间常数等参数。
5. 学习MATLAB 在自动控制中的应用,会利用MA TLAB 提供的函数求出所需要得到的实验结果。
6. 从总体上把握对系统进行校正的思路,能够将理论操作联系实际、运用于实际。
三、课程设计思想我选择的题目是超前校正环节的设计,通过参考课本和课外书,我大体按以下思路进行设计。
首先通过编写程序显示校正前的开环Bode 图,单位阶跃响应曲线和闭环Nyquist 图。
在Bode 图上找出剪切频率,算出相角裕量。
然后根据设计要求求出使相角裕量等于45度的新的剪切频率和分度系数a 。
最后通过程序显示校正后的Bode 图,阶跃响应曲线和Nyquist 图,并验证其是否符合要求。
四、课程设计的步骤及结果 1、因为()()()10.110.3O k G s s s s =++是Ⅰ型系统,其静态速度误差系数Kv=K,因为题目要求校正后系统的静态速度误差系数6v K ≤,所以取K=6。
通过以下程序画出未校正系统的开环Bode 图,单位阶跃响应曲线和闭环Nyquist 图: k=6;n1=1;d1=conv(conv([1 0],[0.1 1]),[0.3 1]); [mag,phase,w]=bode(k*n1,d1); figure(1);margin(mag,phase,w); hold on;figure(2)s1=tf(k*n1,d1); sys=feedback(s1,1); step(sys); figure(3);sys1=s1/(1+s1) nyquist(sys1); grid on; 结果如下:M a g n i t u d e (d B )1010101010P h a s e (d e g )Bode DiagramFrequency (rad/sec)图1--校正前开环BODE 图由校正前Bode 图可以得出其剪切频率为 3.74,可以求出其相角裕量0γ=1800-900-arctan0.10c ω-arctan0.30c ω=21.20370。
实验五系统超前校正(4学时)本实验为设计性实验一、实验目的1.了解和观测校正装置对系统稳定性及动态特性的影响。
2.学习校正装置的设计和实现方法。
二、实验原理工程上常用的校正方法通常是把一个高阶系统近似地简化成低阶系统,并从中找出少数典型系统作为工程设计的基础,通常选用二阶、三阶典型系统作为预期典型系统。
只要掌握典型系统与性能之间的关系,根据设计要求,就可以设计系统参数,进而把工程实践确认的参数推荐为“工程最佳参数”,相应的性能确定为典型系统的性能指标。
根据典型系统选择控制器形式和工程最佳参数,据此进行系统电路参数计算。
在工程设计中,经常采用二阶典型系统来代替高阶系统(如采用主导极点、偶极子等概念分析问题)其动态结构图如图7-1所示。
同时还经常采用“最优”的综合校正方法。
图7-1二阶典型系统动态结构图二阶典型系统的开环传递函数为)2()1()(2nnssTssKsGξωω+=+=闭环传递函数2222)(nnnsssωξωω++=Φ式中KTTKn21,==ξω,或者nn TKξωξω21,2==二阶系统的最优模型(1)最优模型的条件 根据控制理论,当22707.0==ξ时,其闭环频带最宽,动态品质最好。
把22=ξ代入KT21=ξ得到,KT T K 21,21==或,这就是进行校正的条件。
(2)最优模型的动态指标为%3.4%100%21/=⨯=--ξξπσe ,T t ns 3.43≈=ω三、实验仪器及耗材1.EL —AT3自动控制原理实验箱一台; 2.PC 机一台; 3.数字万用表一块 4.配套实验软件一套。
四、实验容及要求未校正系统的方框图如图7-2所示,图7-3是它的模拟电路。
图7-2未校正系统的方框图矫正后未调整电路图图7-3未校正系统的模拟电路设计串联校正装置使系统满足下述性能指标(1) 超调量%σ≤5% (2) 调节时间t s ≤1秒(3) 静态速度误差系数v K ≥20 1/秒 1.测量未校正系统的性能指标 (1)按图7-3接线;(2)加入单位阶跃电压,观察阶跃响应曲线,并测出超调量%σ和调节时间t s 。
目录一.设计题目二. 设计报告正文2.1 设计思路 (2)2.2根据稳态误差要求,确定K的值 (2)2.3系统的开环传递函数的结构图 (3)2.4计算待校正系统的相角裕度 (3)2.5校正后的系统传递函数 (3)2.6验证已校正系统的相角裕度 (4)三. 实现与验证编程 (4)3.1制出待校正系统的bode图和单位阶跃响应 (4)3.2算未校正系统的幅值裕量和相位裕....................... 错误!未定义书签。
3.3前校正网络的传递函数................................. 错误!未定义书签。
3.4系统的开环传递函数及伯德图........................... 错误!未定义书签。
3.5算校正后系统的幅值裕量和相位裕量..................... 错误!未定义书签。
3.5校正前后的Bode图 (10)四. 设计总结参考文献 (10)自动控制原理课程设计一.设计题目设单位负反馈系统的开环传递函数为)1()(+=s s K s G用相应的频率域校正方法对系统进行校正设计,使系统满足如下动态和静态性能:(1) 相角裕度045≥γ;(2) (2) 在单位斜坡输入下的稳态误差为1.0=sse ; (3) 系统的剪切频率小于7.5rad/s 。
要求:(1) 分析设计要求,说明校正的设计思路(超前校正,滞后校正或滞后-超前校正);(2) 详细设计(包括的图形有:校正结构图,校正前系统的Bode 图,校正装置的Bode 图,校正后系统的Bode 图);(3) 用MATLAB 编程代码及运行结果(包括图形、运算结果);(4) 校正前后系统的单位阶跃响应图。
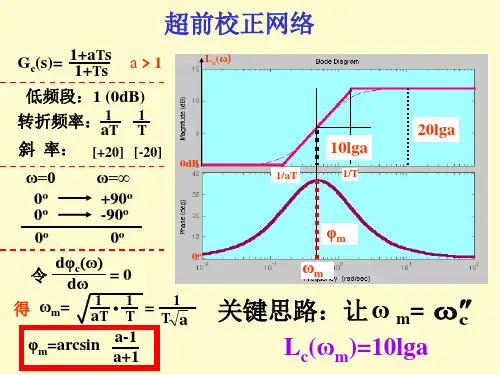
二、设计报告正文2.1设计思路超前校正装置具有相位超前作用,它可以补偿原系统过大的滞后相角,从而增加系统的相角裕度和带宽,提高系统的相对稳定性和响应速度。
超前校正通常用来改善系统的动态性能,在系统的稳态性能较好而动态性能较差时,采用超前校正可以得到较好的效果。