圆的扫描转换原理
- 格式:docx
- 大小:19.34 KB
- 文档页数:2
前言心法之说,只是为引起大家兴趣而已。
由于SW的帮助太过简单,而公开的出版物中一般也仅作几个例子,至于为什么几乎很少提及,使学习者很难掌握扫描之要领。
本人也是由于觉得放样和扫描总不能得心应手,于是乎下决心钻研一下,恰巧在论坛上看到有几个题目确有意思,通过反复试作,反复验证,终于有一天可以长叹一口气自语道“原来如此”。
论坛上有人说这像是武林绝学。
哈哈!绝学没有,因为扫描大家都经常在使用,只是各有方法罢了。
但是,绝招还是有的,因为有些方法至少到目前为止,我还没有在论坛上看到过。
下面例子中的做法不一定是最简单的,只是为了说明方法而已,有更好的做法欢迎大家一起讨论。
由于心法实际上只是自己的一些摸索和体会,难免有错误或不当之处,希望能得到大家的指正。
基本概念扫描的三要素扫描有三要素,轮廓、路径和引导线。
轮廓和路径是必须的,引导线是选用的。
轮廓是“模板”,是在一个草图平面上的开口或闭口的实线(不是构造线),扫描过程中的截面形状由此“模板”决定,开口的轮廓只能用于曲面扫描,只有闭合的轮廓线才能用于实体的扫描特征。
路径是“驱动器”和“轨道”,路径驱动轮廓草图上一个特定的点在扫描过程中的沿着指定的轨道移动,这个点就是路径与草图平面的交点。
(注意路径不一定是轮廓线的扫描路线。
)由此可见路径必须与轮廓草图相交(不一定垂直),开口路径的起点必须在轮廓草图平面上。
引导线是“控制器”,它强制草图平面上的一个特定的点在扫描过程中沿着引导线移动,直接或间接地控制着草图轮廓线在扫描过程中形状和位置的变化(即我说过的百变心法和挪移心法)。
轮廓草图平面在扫描过程中不断的改变着位置,路径和引导线在扫描过程中始终保持在原有位置上不动。
轮廓草图平面的位置变化在扫描过程中,轮廓草图平面的位置在不断的变化,以使用最多的《随路径变化》的《方向/扭转类型》为例,其变化的规则是:1、扫描前路径与轮廓草图平面的交点在整个扫描过程中始终在路径上;2、轮廓草图平面与路径切线方向的相对位置在扫描过程中没有变化(这句话可能比较抽象,只能在后面的例子中去体会)。
实验2 圆的扫描转换一、实验要求基本要求用Bresenham画圆算法实现圆的绘制。
提高要求用Bresenhamg画圆算法实现奥运会五环标志的绘制。
二、实验报告对下列内容逐项填写,适当添加空白页。
1.算法思想Bresenham画圆算法又称中点画圆算法,与Bresenham 直线算法一样,其基本的方法是利用判别变量来判断选择最近的像素点,判别变量的数值仅仅用一些加、减和移位运算就可以计算出来。
为了简便起见,考虑一个圆心在坐标原点的圆,而且只计算八分圆周上的点,其余圆周上的点利用对称性就可得到。
为什么只计算八分圆周上的点就可以了。
和直线算法类似,圆也有一个“八对称性”。
显然,我们只需要知道了圆上的一个点的坐标 (x, y) ,利用八对称性,我们马上就能得到另外七个对称点的坐标。
和直线算法类似,Bresenham画圆算法也是用一系列离散的点来近似描述一个圆。
2.程序流程图2.源程序清单和结果画圆的程序int d,x,y,x0,y0,r=100;d=3-2*r; x=0; y=r; x0=200; y0=200; //(x0,y0)圆心坐标while(y>=x){ pDC->SetPixel(x+x0,y+y0,RGB(0,0,0)); if(d<0)d=d+4*x+6;elsed=d+4*x-4*y+10,y--;x++;pDC->SetPixel(x+x0,-y+y0,RGB(0,0,0)); pDC->SetPixel(-x+x0,-y+y0,RGB(0,0,0)); pDC->SetPixel(-x+x0,y+y0,RGB(0,0,0)); pDC->SetPixel(-y+x0,x+y0,RGB(0,0,0)); pDC->SetPixel(-y+x0,-x+y0,RGB(0,0,0)); pDC->SetPixel(y+x0,x+y0,RGB(0,0,0)); pDC->SetPixel(y+x0,-x+y0,RGB(0,0,0)); }五环程序int d,x,y,x0,y0,r=53;d=3-2*r; x=0; y=r; x0=200; y0=200; //(x0,y0)圆心坐标while(y>=x){ pDC->SetPixel(x+x0,y+y0,RGB(0,0,255));if(d<0)d=d+4*x+6;elsed=d+4*x-4*y+10,y--;x++;pDC->SetPixel(x+x0,-y+y0,RGB(0,0,255));pDC->SetPixel(-x+x0,-y+y0,RGB(0,0,255));pDC->SetPixel(-x+x0,y+y0,RGB(0,0,255));pDC->SetPixel(-y+x0,x+y0,RGB(0,0,255));pDC->SetPixel(-y+x0,-x+y0,RGB(0,0,255));pDC->SetPixel(y+x0,x+y0,RGB(0,0,255));pDC->SetPixel(y+x0,-x+y0,RGB(0,0,255));}d=3-2*r; x=0; y=r; x0=320; y0=200; //(x0,y0)圆心坐标while(y>=x){ pDC->SetPixel(x+x0,y+y0,RGB(0,0,0));if(d<0)d=d+4*x+6;elsed=d+4*x-4*y+10,y--;x++;pDC->SetPixel(x+x0,-y+y0,RGB(0,0,0));pDC->SetPixel(-x+x0,-y+y0,RGB(0,0,0));pDC->SetPixel(-x+x0,y+y0,RGB(0,0,0));pDC->SetPixel(-y+x0,x+y0,RGB(0,0,0));pDC->SetPixel(-y+x0,-x+y0,RGB(0,0,0));pDC->SetPixel(y+x0,x+y0,RGB(0,0,0));pDC->SetPixel(y+x0,-x+y0,RGB(0,0,0));}d=3-2*r; x=0; y=r; x0=440; y0=200; //(x0,y0)圆心坐标while(y>=x){ pDC->SetPixel(x+x0,y+y0,RGB(255,0,0));if(d<0)d=d+4*x+6;elsed=d+4*x-4*y+10,y--;x++;pDC->SetPixel(x+x0,-y+y0,RGB(255,0,0));pDC->SetPixel(-x+x0,-y+y0,RGB(255,0,0));pDC->SetPixel(-x+x0,y+y0,RGB(255,0,0));pDC->SetPixel(-y+x0,x+y0,RGB(255,0,0));pDC->SetPixel(-y+x0,-x+y0,RGB(255,0,0));pDC->SetPixel(y+x0,x+y0,RGB(255,0,0));pDC->SetPixel(y+x0,-x+y0,RGB(255,0,0));}d=3-2*r; x=0; y=r; x0=260; y0=260; //(x0,y0)圆心坐标while(y>=x){ pDC->SetPixel(x+x0,y+y0,RGB(255,255,0));if(d<0)d=d+4*x+6;elsed=d+4*x-4*y+10,y--;x++;pDC->SetPixel(x+x0,-y+y0,RGB(255,255,0));pDC->SetPixel(-x+x0,-y+y0,RGB(255,255,0));pDC->SetPixel(-x+x0,y+y0,RGB(255,255,0));pDC->SetPixel(-y+x0,x+y0,RGB(255,255,0));pDC->SetPixel(-y+x0,-x+y0,RGB(255,255,0));pDC->SetPixel(y+x0,x+y0,RGB(255,255,0));pDC->SetPixel(y+x0,-x+y0,RGB(255,255,0));}d=3-2*r; x=0; y=r; x0=380; y0=260; //(x0,y0)圆心坐标while(y>=x){ pDC->SetPixel(x+x0,y+y0,RGB( 0,255,0));if(d<0)d=d+4*x+6;elsed=d+4*x-4*y+10,y--;x++;pDC->SetPixel(x+x0,-y+y0,RGB( 0,255,0));pDC->SetPixel(-x+x0,-y+y0,RGB( 0,255,0));pDC->SetPixel(-x+x0,y+y0,RGB( 0,255,0));pDC->SetPixel(-y+x0,x+y0,RGB( 0,255,0));pDC->SetPixel(-y+x0,-x+y0,RGB( 0,255,0));pDC->SetPixel(y+x0,x+y0,RGB( 0,255,0));pDC->SetPixel(y+x0,-x+y0,RGB( 0,255,0));}4.实验总结Bresenham确实是一种很快速的的算法。
计算机图形学——圆的扫描转换(基本光栅图形算法)与直线的⽣成类似,圆弧⽣成算法的好坏直接影响到绘图的效率。
本篇博客将讨论圆弧⽣成的3个主要算法,正负法、Bresenham 法和圆的多边形迫近法,在介绍算法时,只考虑圆⼼在原点,半径为R的情况。
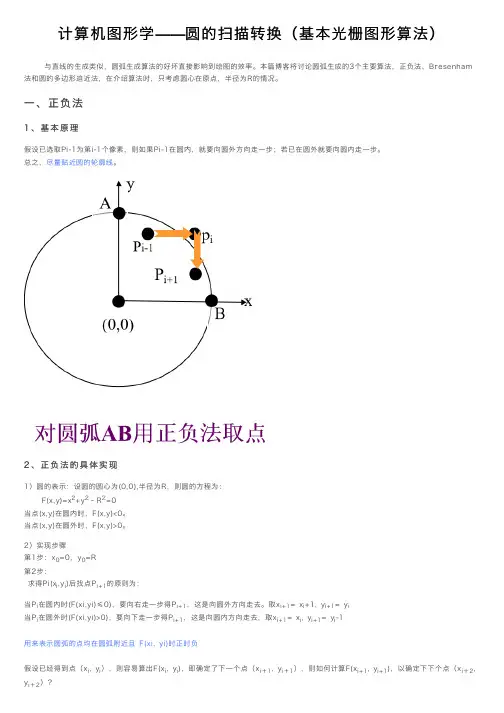
⼀、正负法1、基本原理假设已选取Pi-1为第i-1个像素,则如果Pi-1在圆内,就要向圆外⽅向⾛⼀步;若已在圆外就要向圆内⾛⼀步。
总之,尽量贴近圆的轮廓线。
2、正负法的具体实现1)圆的表⽰:设圆的圆⼼为(0,0),半径为R,则圆的⽅程为:F(x,y)=x2+y2–R2=0当点(x,y)在圆内时,F(x,y)<0。
当点(x,y)在圆外时,F(x,y)>0。
2)实现步骤第1步:x0=0,y0=R第2步:求得Pi(x i,y i)后找点P i+1的原则为:当P i在圆内时(F(xi,yi)≤0),要向右⾛⼀步得P i+1,这是向圆外⽅向⾛去。
取x i+1= x i+1, y i+1= y i当P i在圆外时(F(xi,yi)>0),要向下⾛⼀步得P i+1,这是向圆内⽅向⾛去,取x i+1= x i, y i+1= y i-1⽤来表⽰圆弧的点均在圆弧附近且 F(xi, yi)时正时负假设已经得到点(x i, y i),则容易算出F(x i, y i),即确定了下⼀个点(x i+1, y i+1),则如何计算F(x i+1, y i+1),以确定下下个点(x i+2, y i+2)?分为两种情况:右⾛⼀步后:x i+1=x i+1,y i+1=y i,此时:F(x i+1, y i+1)=x i+12+y i2-R2=x i2+y i2-R2+2x i+1 = F(x i, y i)+2x i+1下⾛⼀步后:x i+1=x i,y i+1=y i-1, 此时:F(x i+1, y i+1)=x i2+(y i-1)2-R2= F(x i, y i)-2y i+1由此可得:确定了F(xi+1, yi+1)之后,即可决定下⼀个点(xi+2, yi+2),选择道理同上。
第四章、基本图形生成算法教学目的:1、知道图形生成中的基本问题;2、熟练掌握直线的扫描转换、圆与椭圆的扫描;3、掌握区域填充;4、了解线宽与线型的处理。
�在光栅显示器上显示的任何一种图形,实际上都是一些具有一种或多种颜色的象素的集合。
�生成算法即图形设备生成图形的方法,也叫光栅化或或图形的扫描转换,是确定一个象素集合及其颜色,用于显示一个图形的过程。
确定一个象素集合及其颜色,用于显示一个图形的过程,称为图形的扫描转换或光栅化。
�对图形的扫描转换分为两部分:先确定像素,再用图形的颜色或其他属性进行某种写操作。
绘图元素�构成图形的基本元素,主要有点、直线、圆和曲线等。
图形元素包含的信息:①图元的类型②图元的几何信息③图元的非几何信息;④图元的指针信息11、点22、位置33、像素44、直线55、曲线66、填充点、线图形基元包括:多边形、曲线、字符串 实心图形(或称图形填充)一级图形元素二级图形元素第一节、扫描转换算法一、坐标系1.用户坐标系�在实际世界中用来描述物体的位置、形状等。
坐标单位任意,坐标值是实数、范围不限。
2.笛卡尔坐标系(直角坐标系)�在计算机图形学中使用用来描述物体。
3.设备坐标系�在某一特定设备上用来描述物体,如显示器的屏幕坐标系,绘图仪的绘图坐标系。
坐标单位为像素、步长,即设备的分辨率。
坐标值是整数,有固定的取值范围。
4.规范坐标系�在通用图形软件包中使用的用来描述物体数据所采用的坐标系。
�目的是为了使通用图形软件包摆脱对具体物理设备的依赖性,也为了便于在不同应用和不同系统之间交换图形信息。
�坐标单位任意取,坐标取值范围是[0,1]区间。
笛卡儿坐标系与屏幕坐标系的转换�屏幕(x,y)=(x笛卡儿+x最大分辨率/2,y最大分辨率/2- y笛卡儿)二、笛卡尔坐标系和设备坐标系中相关概念的区别(1)像素点�·在几何学中,点没有准数,没有大小,只表示了在坐标系统中的一个位置。
·在图形系统中,点要由数值坐标表示。
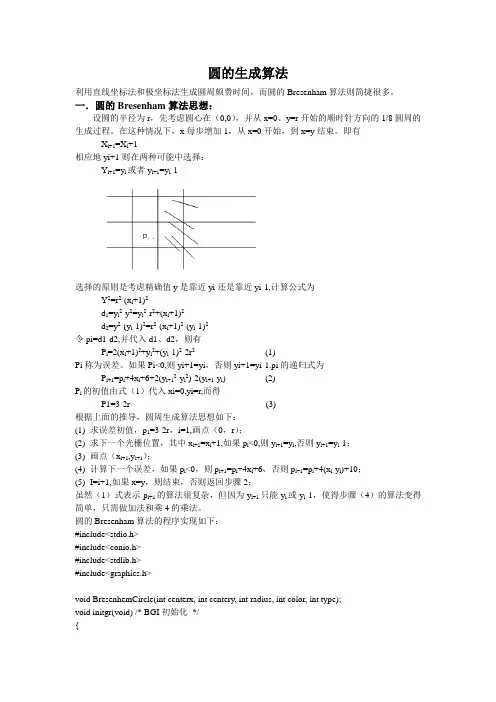
圆的生成算法利用直线坐标法和极坐标法生成圆周颇费时间,而圆的Bresenham算法则简捷很多。
一.圆的Bresenham算法思想:设圆的半径为r,先考虑圆心在(0,0),并从x=0、y=r开始的顺时针方向的1/8圆周的生成过程。
在这种情况下,x每步增加1,从x=0开始,到x=y结束。
即有X i+1=X i+1相应地yi+1则在两种可能中选择:Y i+1=y i或者y i+1=y i-1选择的原则是考虑精确值y是靠近yi还是靠近yi-1,计算公式为Y2=r2-(x i+1)2d1=y i2-y2=y i2-r2+(x i+1)2d2=y2-(y i-1)2=r2-(x i+1)2-(y i-1)2令pi=d1-d2,并代入d1、d2,则有P i=2(x i+1)2+y i2+(y i-1)2-2r2(1)Pi称为误差。
如果Pi<0,则yi+1=yi,否则yi+1=yi-1.pi的递归式为P i+1=p i+4x i+6+2(y i+12-y i2)-2(y i+1-y i) (2)P i的初值由式(1)代入xi=0,yi=r,而得P1=3-2r (3)根据上面的推导,圆周生成算法思想如下:(1)求误差初值,p1=3-2r,i=1,画点(0,r);(2)求下一个光栅位置,其中x i+1=x i+1,如果p i<0,则y i+1=y i,否则y i+1=y i-1;(3)画点(x i+1,y i+1);(4)计算下一个误差,如果p i<0,则p i+1=p i+4x i+6,否则p i+1=p i+4(x i-y i)+10;(5)I=i+1,如果x=y,则结束,否则返回步骤2;虽然(1)式表示p i+1的算法很复杂,但因为y i+1只能y i或y i-1,使得步骤(4)的算法变得简单,只需做加法和乘4的乘法。
圆的Bresenham算法的程序实现如下:#include<stdio.h>#include<conio.h>#include<stdlib.h>#include<graphics.h>void BresenhemCircle(int centerx, int centery, int radius, int color, int type);void initgr(void) /* BGI初始化*/{int gd = DETECT, gm = 0; /* 和gd = VGA,gm = VGAHI是同样效果*/ registerbgidriver(EGAVGA_driver);/* 注册BGI驱动后可以不需要.BGI文件的支持运行*/ initgraph(&gd, &gm, "");setbkcolor(WHITE);}int main(void){int centerx,centery,radius,color,type;printf("centerx,centery\n");scanf("%d",¢erx);scanf("%d",¢ery);printf("radius\n");scanf("%d",&radius);printf("color,type\n");scanf("%d",&color);scanf("%d",&type);initgr(); /*BGI初始化*/BresenhemCircle(centerx,centery,radius,color,type);getch();closegraph();}void BresenhemCircle(int centerx, int centery, int radius, int color, int type){int x =type= 0;int y = radius;int delta = 2*(1-radius);int direction;while (y >= 0) {if (!type) {putpixel(centerx+x, centery+y, color);putpixel(centerx-x, centery+y, color);putpixel(centerx-x, centery-y, color);putpixel(centerx+x, centery-y, color);}else {line(centerx+x, centery+y, centerx+x, centery-y);line(centerx-x, centery+y, centerx-x, centery-y);}if (delta < 0) {if ((2*(delta+y)-1) < 0) {direction = 1;}else {direction = 2;}}else if(delta > 0) {if ((2*(delta-x)-1) <= 0) {direction = 2;}else {direction = 3;}}else {direction=2;}switch(direction) {case 1:x++;delta += (2*x+1);break;case 2:x++;y--;delta += 2*(x-y+1);break;case 3:y--;delta += (-2*y+1);break;}}}二.中心画圆法圆的特性:八对称性。
基于椭圆弧扫描转换的超声波无损检测全聚焦算法超声波无损检测是一种常用的非破坏性检测方法,它广泛应用于工业生产、医疗诊断等领域。
随着科学技术的不断进步,超声波无损检测的技术也在不断发展。
本文将介绍一种基于椭圆弧扫描转换的超声波无损检测全聚焦算法。
一、椭圆弧扫描转换原理在传统的超声波无损检测方法中,通常采用的是线性扫描方式。
这种方式虽然可以得到较为准确的检测结果,但是需要耗费大量的时间和精力。
而椭圆弧扫描转换则是一种更为高效的检测方式。
椭圆弧扫描转换是将椭圆弧形状的探头转换为线性扫描信号进行检测的一种方法。
具体来说,它是通过将椭圆弧形状的探头分解为多个小的线性探头,再对每个小的线性探头进行扫描,最终将所有的扫描结果合并起来,得到完整的检测结果。
二、椭圆弧扫描转换在超声波无损检测中的应用在超声波无损检测中,椭圆弧扫描转换可以用来进行全聚焦检测。
全聚焦是一种将信号聚焦于物体内部的技术,可以提高检测的准确性和灵敏度。
而椭圆弧扫描转换的高效性和全聚焦的准确性相结合,可以得到更加精确的检测结果。
具体来说,椭圆弧扫描转换的全聚焦算法是先将椭圆弧形状的探头分解为多个小的线性探头,再对每个小的线性探头进行扫描。
对于每个小的线性探头,都要进行多次扫描,每次扫描的焦点位置都不同,最终将所有的扫描结果合并起来,得到完整的检测结果。
三、椭圆弧扫描转换全聚焦算法的优点相比于传统的线性扫描方式,椭圆弧扫描转换全聚焦算法具有以下优点:1. 高效性:椭圆弧扫描转换可以将椭圆弧形状的探头分解为多个小的线性探头,每个小的线性探头都可以进行多次扫描,从而提高了检测的效率。
2. 准确性:全聚焦技术可以将信号聚焦于物体内部,从而提高了检测的准确性和灵敏度。
3. 适用性:椭圆弧扫描转换全聚焦算法适用于各种形状的物体,可以满足不同的检测需求。
四、椭圆弧扫描转换全聚焦算法的应用前景椭圆弧扫描转换全聚焦算法在超声波无损检测领域具有广泛的应用前景。
它不仅可以应用于工业生产中的材料检测、焊接检测等方面,还可以应用于医疗诊断中的疾病检测、器官检测等方面。

扫描转换算法——DDA、中点画线画圆、椭圆我的理解:在光栅图形学中,由于每⼀个点的表⽰都只能是整数值,所以光栅图形学实际只是对对实际图形的近似表⽰。
数值微分法(DDA):以下PPT截图来⾃北京化⼯⼤学李辉⽼师代码实现:import matplotlib.pyplot as pltimport matplotlib.patches as patchesfrom pylab import *def init(ax):#将主标签设置为1的倍数majorLocator = MultipleLocator(1);#设置主刻度标签的位置,标签⽂本的格式ax.xaxis.set_major_locator(majorLocator);ax.yaxis.set_major_locator(majorLocator);ax.grid(True);if__name__ == '__main__':x0, y0, x1, y1 = map(int, input("请输⼊直线的起点与终点: ").split('')) ax = subplot(title='DDA');ax.plot([x0, x1], [y0, y1], 'r');delta_x = x1-x0;delta_y = y1-y0;#画坐标轴if x1>y1:ax.axis([x0-1, x1+1, y0-1, x1+1]);init(ax);else:ax.axis([x0-1, y1+1, y0-1, y1+1]);init(ax);#计算斜率k的值if delta_x == 0:k = 999999999;else:k = delta_y / delta_x;#如果|k|<=1if k>-1 and k<1:while x0<=x1:x = round(x0);y = round(y0);ax.plot(x, y, 'b.');x0 += 1;y0 = y0+k;else:while y0<=y1:x = round(x0);y = round(y0);ax.plot(x, y, 'b.');x0 += 1/k;y0 += 1;plt.show();运⾏截图:中点画线:以下PPT截图来⾃北京化⼯⼤学李辉⽼师代码实现:wimport matplotlib.pyplot as pltimport matplotlib.patches as patchesfrom pylab import *def init(ax):#将主标签设置为1的倍数majorLocator = MultipleLocator(1);#设置主刻度标签的位置,标签⽂本的格式ax.xaxis.set_major_locator(majorLocator);ax.yaxis.set_major_locator(majorLocator);ax.grid(True);if__name__ == '__main__':x0, y0, x1, y1 = map(int, input("请输⼊直线的起点与终点: ").split('')) ax = subplot(title='Midpoint');ax.plot([x0, x1], [y0, y1], 'r');a = y0-y1;b = x1-x0;d = 2*a+b;d1 = 2*a;d2 = 2*(a+b);#画坐标轴if x1>y1:ax.axis([x0-1, x1+1, y0-1, x1+1]);init(ax);else:ax.axis([x0-1, y1+1, y0-1, y1+1]);init(ax);x = x0;y = y0;ax.plot(x, y, 'r.');while(x < x1):if d<0:x += 1;y += 1;d += d2;else:x += 1;d += d1;ax.plot(x, y, 'r.');plt.show()中点画圆法:以下PPT截图来⾃北京化⼯⼤学李辉⽼师import matplotlib.pyplot as pltimport matplotlib.patches as patchesfrom pylab import *def init(ax):#将主标签设置为1的倍数majorLocator = MultipleLocator(1);#设置主刻度标签的位置,标签⽂本的格式ax.xaxis.set_major_locator(majorLocator);ax.yaxis.set_major_locator(majorLocator);ax.grid(True);if__name__ == '__main__':r = int(input("请输⼊半径: "));plt.figure(figsize=(r*0.1, r*0.1));ax = subplot(title='MidPointCircle');d = 1-r;ax.axis([-r-1, r+1, -r-1, r+1]);init(ax);x = 0;y = r;ax.plot(x, y, 'r.');while(x <= y):if d<0:d += 2*x+3;else:d += 2*(x-y)+5;y -= 1;x += 1;ax.plot(x, y, 'r.');ax.plot(y, x, 'r.');ax.plot(x, -y, 'r.');ax.plot(-y, x, 'r.');ax.plot(-x, y, 'r.');ax.plot(y, -x, 'r.');ax.plot(-x, -y, 'r.');ax.plot(-y, -x, 'r.');plt.show()椭圆的扫描转换:以下PPT截图来⾃北京化⼯⼤学李辉⽼师代码实现:import matplotlib.pyplot as pltimport matplotlib.patches as patchesimport mpl_toolkits.axisartist as axisartistfrom pylab import *def init(ax):#设置x轴:空⼼箭头、数值在下⽅ax.axis["x"] = ax.new_floating_axis(0, 0);ax.axis["x"].set_axisline_style("->", size = 1.0);ax.axis["x"].set_axis_direction("bottom");#设置y轴:空⼼箭头、数值在右⽅ax.axis["y"] = ax.new_floating_axis(1, 0);ax.axis["y"].set_axisline_style("->", size = 1.0);ax.axis["y"].set_axis_direction("right");if__name__ == '__main__':a, b = map(int, input("请输⼊椭圆的长、短半径: ").split('')); fig = plt.figure(figsize=(5, 7))#初始化画布ax = axisartist.Subplot(fig, 111, title='MidpointElipse');#将绘图区对象添加到画布中fig.add_axes(ax)init(ax);x = 0;y = b;d1 = b*b+a*a*(-b+0.25); #增量初值ax.plot(x, y, 'r.');ax.plot(x, -y, 'r.');while(b*b*(x+1)<a*a*(y-0.5)): #法向量的x、y不⼀样⼤时if d1<0:d1 += b*b*(2*x+3);x += 1;else:d1 += b*b*(2*x+3)+a*a*(-2*y+2);x += 1;y -= 1;#画四个对称点ax.plot(x, y, 'r.');ax.plot(x, -y, 'r.');ax.plot(-x, y, 'r.');ax.plot(-x, -y, 'r.');#画到了法向量的x=y,即椭圆弧的下半部分d2 = b*b*(x+0.5)*(x+0.5)+a*a*(y-1)*(y-1)-a*a*b*b;while y>0: #终结条件y>0if d2<0:d2 += b*b*(2*x+2)+a*a*(-2*y+3);x += 1;y -= 1;else:d2 += a*a*(-2*y+3);y -= 1;ax.plot(x, y, 'r.');ax.plot(x, -y, 'r.');ax.plot(-x, y, 'r.');ax.plot(-x, -y, 'r.');plt.show()。
面轮廓度的测量方法面轮廓度是指物体或物体表面的外形特征,用于描述其立体形状的程度。
测量面轮廓度可以帮助我们了解物体的几何形状以及其与设计规格的接近程度。
下面将介绍几种常用的测量面轮廓度的方法。
1.圆形度测量法:圆形度是指物体表面的圆度,与物体表面上线圈之间的距离差异有关。
使用圆形度测量仪器在物体表面选取几个均匀间隔的点,测量这些点与参考圆周之间的距离。
根据测量结果,计算这些点的平均距离差异,从而得到物体表面的圆形度指标。
2.方形度测量法:方形度是指物体表面的平整度,也是描述物体边缘直角性的指标。
使用方形度测量仪器在物体边缘上选取几个均匀间隔的点,测量这些点与参考线之间的距离。
根据测量结果,计算这些点的平均距离差异,从而得到物体表面的方形度指标。
3.曲面度测量法:曲面度是指物体表面的弧度或曲率,与物体表面上曲率变化的速率有关。
使用曲面度测量仪器在物体表面选取多个相邻点,测量这些点的曲率半径和曲率方向。
通过计算这些曲率信息,可以得到物体表面的曲面度指标。
4.轮廓仪测量法:轮廓仪是一种专用的测量仪器,通过接触或非接触的方式对物体的轮廓进行测量。
其原理是利用激光或摄像头等感应装置对物体表面进行扫描,然后将扫描结果转换为数学模型,从而得到物体的轮廓信息。
轮廓仪具有高精度和高速度的特点,适用于测量各种形状复杂的物体的面轮廓度。
5.光学测量法:光学测量法是一种非接触式的测量方法,通过利用光线的传播和反射等原理对物体表面的轮廓进行测量。
常用的光学测量方法包括激光扫描、投影测量、像差测量等。
这些方法具有高精度的特点,可以对物体的面轮廓度进行精确测量。
总结起来,测量面轮廓度的方法包括圆形度测量法、方形度测量法、曲面度测量法、轮廓仪测量法和光学测量法等。
根据不同的测量需求和物体形状的复杂程度,选择合适的测量方法可以得到准确可靠的测量结果,帮助我们评估物体的形状特征。
计算机图形学第二版(陆枫)课后习题集第一章绪论概念:计算机图形学、图形、图像、点阵法、参数法、图形的几何要素、非几何要素、数字图像处理;计算机图形学和计算机视觉的概念及三者之间的关系;计算机图形系统的功能、计算机图形系统的总体结构。
第二章图形设备图形输入设备:有哪些。
图形显示设备:CRT的结构、原理和工作方式。
彩色CRT:结构、原理。
随机扫描和光栅扫描的图形显示器的结构和工作原理。
图形显示子系统:分辨率、像素与帧缓存、颜色查找表等基本概念,分辨率的计算第三章交互式技术什么是输入模式的问题,有哪几种输入模式。
第四章图形的表示与数据结构自学,建议至少阅读一遍第五章基本图形生成算法概念:点阵字符和矢量字符;直线和圆的扫描转换算法;多边形的扫描转换:有效边表算法;区域填充:4/8连通的边界/泛填充算法;内外测试:奇偶规则,非零环绕数规则;反走样:反走样和走样的概念,过取样和区域取样。
5.1.2 中点 Bresenham 算法(P109)5.1.2 改进 Bresenham 算法(P112)习题解答习题5(P144)5.3 试用中点Bresenham算法画直线段的原理推导斜率为负且大于1的直线段绘制过程(要求写清原理、误差函数、递推公式及最终画图过程)。
(P111)解: k<=-1 |△y|/|△x|>=1 y为最大位移方向故有构造判别式:推导d各种情况的方法(设理想直线与y=yi+1的交点为Q):所以有: y Q-kx Q-b=0 且y M=y Qd=f(x M-kx M-b-(y Q-kx Q-b)=k(x Q-x M)所以,当k<0,d>0时,M点在Q点右侧(Q在M左),取左点 P l(x i-1,y i+1)。
d<0时,M点在Q点左侧(Q在M右),取右点 Pr(x i,y i+1)。
d=0时,M点与Q点重合(Q在M点),约定取右点 Pr(x i,y i+1) 。
所以有递推公式的推导:d2=f(x i-1.5,y i+2)当d>0时,d2=y i+2-k(x i-1.5)-b 增量为1+k=d1+1+k当d<0时,d2=y i+2-k(x i-0.5)-b 增量为1=d1+1当d=0时,5.7 利用中点 Bresenham 画圆算法的原理,推导第一象限y=0到y=x圆弧段的扫描转换算法(要求写清原理、误差函数、递推公式及最终画图过程)。