43
44
行星轮系的转化轮系——定轴轮系
n1H n1 nH n2H n2 nH n3H n3 nH nHH nH nH 0
45
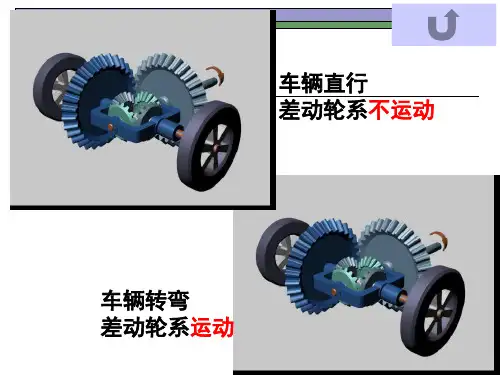
差动轮系
46
简单行星轮系
转化轮系中轮1和3的传动比
i1H3
n1H n3H
n1 nH n3 nH
z3 z1
i1H3
n1H n3H
n1 nH nH
轮1至轮k间从动轮齿数的乘积 轮1至轮k间主动轮齿数的乘积
注意的问题
(1)n1、nk、nH必须 是轴线平行的相应构 件的转速;
(2)各转速代入公式
i1Hk
n1 nH nk nH
时,应带有本身的正
号或负号。
49
例题6 如图所示行星轮系,各轮
齿数为z1=40, z2=20,z3=80。 试计算中心轮1和系杆H的传动
mz4 2
mz2' 2
mz3
z4 z2' 2z3 210
41
定轴轮系传动比
首轮1,末轮k,外啮合次数m
i1k
n1 nk
(1)m
各从动轮齿数的乘积 各主动轮齿数的乘积
如果是空间定轴轮系,(-1)m不再适用,需 要在图中画箭头表示各轮转向。
42
§8-3 行星轮系的传动比
由于行星轮系中行星轮 的轴线位置不固定,行 星轮既自转又公转,是 一复合运动,其转速不 是一个简单值,不能直 接计算轮系的传动比。
i14
n1 n4
z2 z3z4 z1 z2 z3
170
1 4
170×330°
36
360° ×25 ×0.0077 =30 s
一定轴轮系由圆柱齿轮、 锥齿轮和蜗杆蜗轮组成, 已知各轮齿数z1=2, z2=50, z2’=z3’=20, z3=z4=40, 采用右旋蜗杆, 若蜗杆1为主动轮, n1=1500r/min,求齿轮4的 转速和转向。