机械设计基础第5章轮系
- 格式:ppt
- 大小:3.31 MB
- 文档页数:2



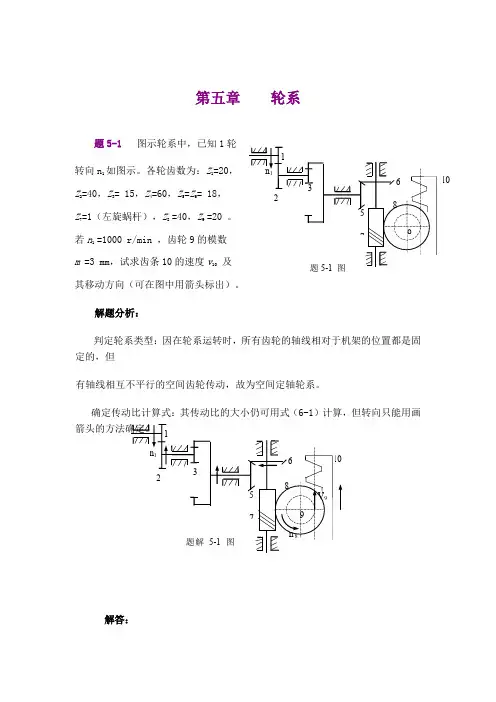
第五章轮系题5-1图示轮系中,已知1轮Array如图示。
各轮齿数为:Z1=20,转向n1Z=40,Z3= 15,Z4=60,Z5=Z6= 18,2Z=1(左旋蜗杆),Z8=40,Z9 =20 。
7若n1 =1000 r/min ,齿轮9的模数m =3 mm,试求齿条10的速度v及10其移动方向(可在图中用箭头标出)。
解题分析:判定轮系类型:因在轮系运转时,所有齿轮的轴线相对于机架的位置都是固定的,但有轴线相互不平行的空间齿轮传动,故为空间定轴轮系。
确定传动比计算式:其传动比的大小仍可用式(6-1)计算,但转向只能用画解答:1.确定齿条10的速度v 10 大小∵ 320118152040186040753186428118=⨯⨯⨯⨯⨯⨯===z z z z z z z z n n i∴min /125.3min /320100018189r r i n n n ====s /mm .s /mm .n mz n d v v 82960125320360609999910=⨯⨯⨯π=π=π==2.确定齿条10移动方向根据圆柱齿轮传动、锥齿轮传动及蜗杆传动的转向关系,可定出蜗轮转向n 8为逆时针方向,齿轮9与蜗轮8同轴,n 9 = n 8,齿条10线速度v 10与9轮线速度v 9方向一致,故齿条10的移动方向应朝上(↑)题5-2 图示轮系中,已知蜗杆1的齿数为Z 2= 50 ;蜗杆2′为单头右旋蜗杆, 蜗轮3的齿数为Z 3=40;其余各轮齿 数为;Z 3′=30,Z 4 = 20 ,Z 4′ = 26 , Z 5 =18,Z 5′=28,Z 6=16,Z 7=18。
要求:(1) 分别确定蜗轮2、蜗轮3的 轮齿螺旋线方向及转向n 2、n 3 ;(2) 计算传动比i 17 ,并确定齿 轮7的转向n 7。
解题分析:判定轮系类型:因在轮系运转时,所有齿轮的轴线相对于机架的 位置都是固定的,但有轴线相互不 平行的空间齿轮传动,故为空间定 轴轮系。
第5章轮系一、教学目的:通过本章的学习,达到了解了解轮系的类型、定轴轮系、周转轮系与复合轮系传动比计算、几种特殊行星齿轮传动等等问题的目的。
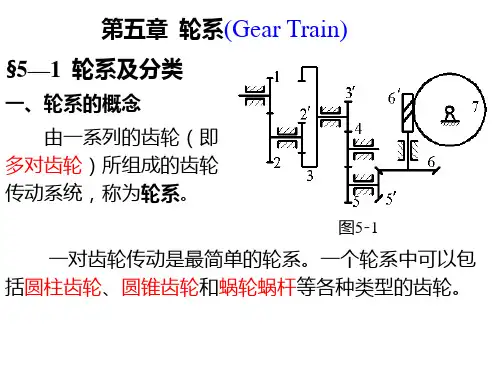
二、教学方法:黑板教学与多媒体教学相结合三、教学手段:课堂教学和课后辅导相结合四、学时分配:讲课学时为4学时五、重点、难点:5.2节、53节与5.4节重点讲解难点:定轴、周转与复合轮系的传动比计算问题六、作业布置:习题5-6至5-10七、辅导安排:课后安排辅导八、教学内容5.1 轮系的类型由一对齿轮组成的机构是齿轮传动的最简单形式。
在精密机械中,为了将输入轴的一种转速变换为输出轴的多种转速,或者为了获得很大的传动比,常采用一系列互相啮合的齿轮(包括圆柱齿轮、圆锥齿轮和蜗杆蜗轮等各种类型的齿轮)将输入轴和输出轴连接起来。
这种由一系列齿轮组成的传动系统称为轮系。
轮系可以分为:1定轴轮系;2 周转轮系。
5.1.1 定轴轮系定轴轮系:轮系在传动时,所有齿轮轴线的位置都是固定的。
如下图所示定轴轮系5.1.2 周转轮系周转轮系:至少有一个齿轮的轴线可以绕另一齿轮的固定轴线转动的轮系。
如下图所示。
周转轮系复合轮系:既包含有定轴轮系部分,又包含有周转轮系部分的轮系。
5.2 定轴轮系传动比计算在轮系中,输入轴与输出轴的角速度(或转速)之比称为轮系的传动比,用表示。
下标a,b为输入轴和输出轴的代号。
即表示齿轮传动的转向关系有用正负号表示或用画箭头表示两种方式。
对于平行轴定轴轮系,其转向关系用正负号表示: 转向相同,传动比取正号;转向相反,传动比则取负号。
对于非平行轴定轴轮系,各轮转动方向用画箭头表示。
回过去再看前面的定轴轮系图,定轴轮系由圆柱齿轮组成,各轮的轴线互相平行。
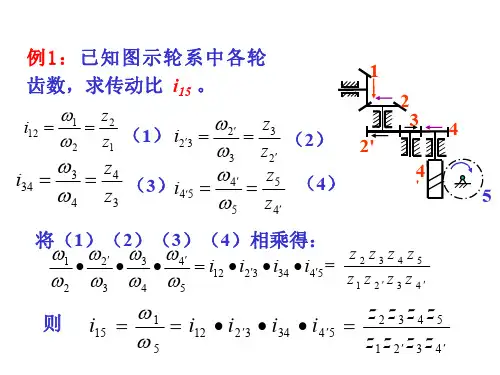
输入轴与主动轮1固联,输出轴与齿轮5固联,该轮系传动比就是输入轴与输出轴的转速比。
若已知轮系中各轮的齿数,则为了计算轮系的传动比,可先计算各级齿轮的传动比,分别为其中,式中“ ”表示外啮合时主、从动轮转向相反;“+”表示内啮合时主、从动轮转向相同。
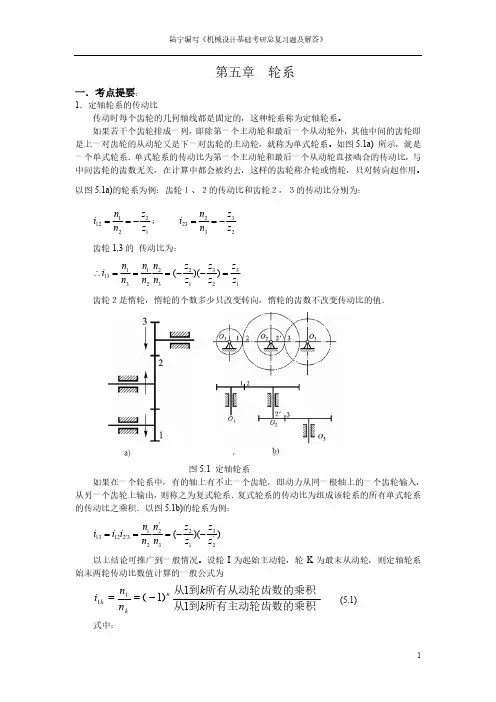
第五章 轮系一.考点提要:1.定轴轮系的传动比传动时每个齿轮的几何轴线都是固定的,这种轮系称为定轴轮系。
如果若干个齿轮排成一列,即除第一个主动轮和最后一个从动轮外,其他中间的齿轮即是上一对齿轮的从动轮又是下一对齿轮的主动轮,就称为单式轮系。
如图5.1a) 所示,就是一个单式轮系.单式轮系的传动比为第一个主动轮和最后一个从动轮直接啮合的传动比,与中间齿轮的齿数无关,在计算中都会被约去,这样的齿轮称介轮或惰轮,只对转向起作用。
以图5.1a)的轮系为例:齿轮1、2的传动比和齿轮2,3的传动比分别为:122112z z n n i; 233223z zn n i 齿轮1,3的 传动比为:13231232213113))((z zz z z z n n n n n n i齿轮2是惰轮,惰轮的个数多少只改变转向,惰轮的齿数不改变传动比的值.图5.1 定轴轮系如果在一个轮系中,有的轴上有不止一个齿轮,即动力从同一根轴上的一个齿轮输入,从另一个齿轮上输出,则称之为复式轮系.复式轮系的传动比为组成该轮系的所有单式轮系的传动比之乘积.以图5.1b)的轮系为例:))(('23123'2213'21213z z z z n n n n i i i 以上结论可推广到一般情况。
设轮I 为起始主动轮,轮K 为最末从动轮,则定轴轮系始末两轮传动比数值计算的一般公式为所有主动轮齿数的乘积到从所有从动轮齿数的乘积到从)(k k n n i n k k 11111(5.1)式中:n 轮系中从轮1到轮k 之间经过外啮合的次数上式所求为传动比数值的大小,当起始主动轮I 和最末从动轮K 的轴线相平行时,两轮转向的同异可用传动比的正负表达。
两轮转向相同(1n 和k n 同号)时,传动比为“+”;两轮转向相反(1n 和k n 异号)时,传动比为“—”。
在两轮的传动中,如果经过偶数次的外啮合,则传动比为正;如果经过奇数次外啮合,则传动比为负.如果在轮系中要求某两个齿轮的传动比,而其间传动要经过圆锥齿轮或蜗轮蜗杆,则两轮转向的异同一般采用画箭头的方法确定。