多温区电加热炉自适应PID控制方法
- 格式:pdf
- 大小:315.69 KB
- 文档页数:5

pid加热算法PID加热算法是一种广泛应用于工业控制系统中的算法,用于控制加热设备的温度。
PID 是比例-积分-微分控制器的缩写,它通过计算误差信号的比例、积分和微分,生成一个控制信号,从而调整加热设备的功率,使温度达到设定值。
在PID加热算法中,比例控制是最基本的部分。
它根据当前温度与设定温度之间的误差,直接调整加热设备的功率。
误差越大,调整力度就越大。
这样,当温度偏离设定值时,比例控制可以迅速作出反应,使温度回归正轨。
然而,仅仅依靠比例控制是不够的。
因为在实际应用中,加热设备可能存在惯性、热损失等问题,导致温度无法迅速达到设定值。
此时,积分控制就派上了用场。
积分控制将过去的误差累积起来,逐步调整加热设备的功率。
这样,即使温度暂时偏离设定值,积分控制也能通过逐渐调整,使温度逐渐回归设定值。
微分控制则是为了预测未来的温度变化趋势。
它根据误差信号的变化速率,提前调整加热设备的功率。
这样,当温度即将偏离设定值时,微分控制可以提前作出反应,防止温度偏离过大。
综合比例、积分和微分三个部分,PID加热算法可以实现对加热设备的精确控制。
在实际应用中,PID参数(即比例系数、积分系数和微分系数)需要根据具体设备进行调整,以达到最佳的控制效果。
此外,为了防止积分项过大导致的问题(如积分饱和),通常还会引入积分限幅等措施。
总之,PID加热算法是一种非常有效的温度控制方法。
它通过综合考虑误差信号的比例、积分和微分,实现对加热设备的精确控制。
在实际应用中,只需根据具体设备调整PID参数,并采取适当的措施防止积分项过大导致的问题,就可以实现稳定的温度控制。

温控器PID调节方法比例(proportion)调节:是按比例反应系统的偏差,比例(P值)越小引发同样调节的所需的偏差越小,(即同样偏差引起的调节越大,即P值与调节作用成反比)可以加快调节,减少误差,但可使系统的稳定性下降,甚至不稳定。
比例越大,所需偏差越大,系统反应越迟钝。
积分(integral)调节:是使系统消除稳态误差,提高无差度。
只要有误差,积分调节就进行,直至无差,积分调节停止。
积分作用的强弱与积分时间常数(完成一次积分所需的时间)I值成反比。
积分时间短,调节作用强。
积分时间长,动态响应慢。
积分作用常与另两种调节规律结合,组成PI调节器或PID调节器。
微分(differential)调节:微分反映系统偏差信号的变化率。
能预见偏差变化的趋势,产生超前的控制作用,,减少超调,减少调节时间。
微分作用对噪声干扰有放大作用,因此D值太大,对系统抗干扰不利。
微分调节作用的大小与微分时间成正比。
微分作用需要与另外两种调节相结合,组成PD或PID控制器。
PID参数整定顺口溜参数整定斩乱麻,P I D 值顺序查调节作用反反正,小步试验找最佳曲线振荡很频繁,比例度盘要放大曲线漂浮绕大湾,比例度盘往小扳曲线偏离回复慢,积分时间往下降曲线波动摆得快,积分时间再加长,曲线振荡频率快,先把微分降下来动差大来波动慢。
微分时间应加长理想曲线两个波,前高后低4比1一看二调多分析,调节质量不会低。
比例:,加热电流与偏差(即实际值和设定值之差)成比例。
P的大小,在数量上是调节器闭环放大倍数的倒数。
P = 偏差电压∕调节器输出电压比例带越小(P越小),开始时调节电压上升越快,但易过冲。
当温差变小,实际比例越接近P,电压越小。
例如:设定温控于60度,在实际温度为20和40度时,加热的功率就不一样。
积分:如果长时间达不到设定值,积分器起作用,进行修正。
加热电流与偏差的累积(积分)成比例。
因此,只要有偏差存在,尽管偏差极微小,但经过长时间的累积,就会有足够的输出去控制炉丝加热电流,去消除偏差,减少小静态误差。

温度控制与PID算法温度控制与PID算法j较为复杂,下面结合实际浅显易懂的阐述一下PID控制理论,将温度控制及PID算法作一个简单的描述。
1.温度控制的框图这是一个典型的闭环控制系统,用于控制加热温区的温度(PV)保持在恒定的温度设定值(SV)。
系统通过温度采集单元反馈回来的实时温度信号(PV)获取偏差值(EV),偏差值经过PID调节器运算输出,控制发热管的发热功率,以克服偏差,促使偏差趋近于零。
例如,当某一时刻炉内过PCB板较多,带走的热量较多时,即导致温区温度下降,这时,通过反馈的调节作用,将使温度迅速回升。
其调节过程如下:温度控制的功率输出采用脉宽调制的方法。
固态继电器SSR的输出端为脉宽可调的电压U OUT 。
当SSR的触发角触发时,电源电压U AN通过SSR的输出端加到发热管的两端;当SSR的触发角没有触发信号时,SSR关断。
因此,发热管两端的平均电压为U d=(t/T)* U AN=K* U AN其中K=t/T,为一个周期T中,SSR触发导通的比率,称为负载电压系数或是占空比,K 的变化率在0-1之间。
一般是周期T固定不便,调节t, 当t在0-T的范围内变化时,发热管的电压即在0-U AN之间变化,这种调节方法称为定频调宽法。
下面将要描述的PID 调节器的算式在这里的实质即是运算求出一个实时变化的,能够保证加热温区在外界干扰的情况下仍能保持温度在一个较小的范围内变化的合理的负载电压系数K。
2.温度控制的两个阶段温度控制系统是一个惯性较大的系统,也就是说,当给温区开始加热之后,并不能立即观察得到温区温度的明显上升;同样的,当关闭加热之后,温区的温度仍然有一定程度的上升。
另外,热电偶对温度的检测,与实际的温区温度相比较,也存在一定的滞后效应。
这给温度的控制带来了困难。
因此,如果在温度检测值(PV)到达设定值时才关断输出,可能因温度的滞后效应而长时间超出设定值,需要较长时间才能回到设定值;如果在温度检测值(PV)未到设定值时即关断输出,则可能因关断较早而导致温度难以达到设定值。
电炉的温度控制实验目的学习利用PID指令编写程序。
实验设备西门子S7-200PLC一台, EM231模拟量输入模块一个,EM232模拟输出模块一个,0-5V直流稳压电源一台,RS232数据线。
实验功能有一台电炉要求炉温控制在一定得范围。
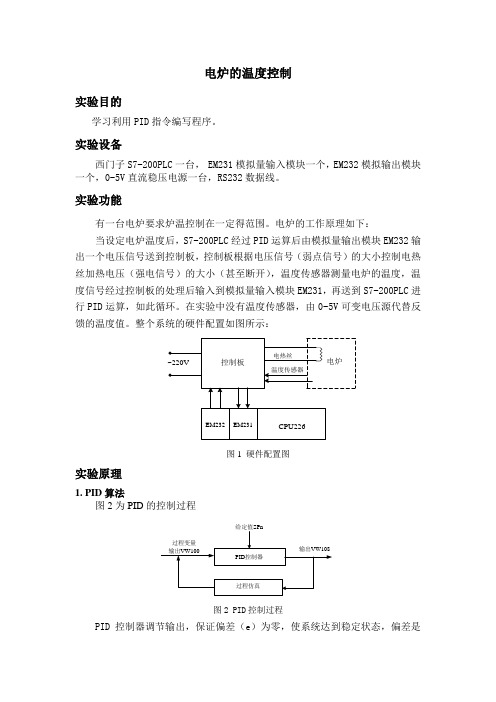
电炉的工作原理如下:当设定电炉温度后,S7-200PLC经过PID运算后由模拟量输出模块EM232输出一个电压信号送到控制板,控制板根据电压信号(弱点信号)的大小控制电热丝加热电压(强电信号)的大小(甚至断开),温度传感器测量电炉的温度,温度信号经过控制板的处理后输入到模拟量输入模块EM231,再送到S7-200PLC进行PID运算,如此循环。
在实验中没有温度传感器,由0~5V可变电压源代替反馈的温度值。
整个系统的硬件配置如图所示:图1 硬件配置图实验原理1. PID算法图2为PID的控制过程图2 PID控制过程PID控制器调节输出,保证偏差(e)为零,使系统达到稳定状态,偏差是给定值(SP )和过程变量(PV )的差。
PID 控制的原理基于以下公式:⎰+++=10**)(dtde K M edt K e K t M c initial c c (1-1) 式中,M (t )是PID 回路的输出;c K 是PID 回路的增益;e 是PID 回路的偏差(给定值与过程变量的差);initial M 是PID 回路输出的初始值。
由于以上的算式是连续量,必须将以上的连续量离散化才能在计算机中运算,离散处理后算式如下:)(*11--+++=∑n n D initial nx I n c n e e K M e K e K M (1-2)式中,)(t M 是在采样时刻n 时PID 回路的输出的计算值;c K 是PID 回路的增益;I K 是积分项的比例常数;D K 是微分项的比例常数;n e 是采样时刻n 的回路的偏差值;1-n e 是采样时刻n-1的回路的偏差值;x e 是采样时刻x 的回路的偏差值;initial M 是PID 回路输出的初始值。

2013 届本科毕业设计(论文)电加热器温度的数字PID控制The digital PID control of electric heater学院:工学院专业班级:电子信息工程0902班姓名:王阿东学号: 0901********指导教师:赵世强副教授完成时间: 2013年4月10日二〇一三年四月论文题目:电加热器温度的数字PID控制专业:电子信息工程学生:王阿东签名:指导教师:赵世强签名:摘要温度是重要的物理量,温度的测量和控制,在工业生产和科研工作中都非常重要。
本文介绍了一种以STC89C52单片机为检测控制中心的数字式水温自动控制系统。
温度测量部分采用单总线集成温度传感器DS18B20,使系统简单可靠,且易于操作。
温度设置部分采用四个独立按键组成,显示部分采用四位共阴数码管显示,使系统变得简便而高效。
温度控制采用PID数字控制算法,通过计算偏差值来控制光耦合和可控硅的通断,从而控制加热器的加热程度。
实际调试表明,采用PID算法能使温度稳定在设定值附近。
关键词:PID算法;单片机;温度控制;光耦合;可控硅Title: The digital PID control of electric heaterMajor:Electronic information engineeringName:Wang Adong Signature: Supervisor:Zhao Shiqiang Signature:ABSTRACTTemperature is an important physical quantities,The Temperature's measurement and control are very important In industrial production and scientific research work.This article introduces a automatic digital water's temperature control system using the STC89C52 microcontroller as the detect and control center.The temperature measurement part uses the one bus integrated temperature sensorDS18B20 ,which making the system more Simple and reliable,And easy tooperate.Temperature setting part is made up of four separate buttons,and Displaypart adopts four Led Display to display, which made the system easy and efficient.The Temperature is controled by the PID Digital control algorithm.The heater uses the common fast heater which the Ordinary families commonly used.Key words: PID algorithm;MCU;Temperature control;Optocoupler;Silicon controlled目录前言 (1)1硬件系统设计 (2)1.1系统总体框图 (2)1.2单片机系统 (3)1.2.1 单片STC89C52 (3)1.3数字温度传感器DS18B20 (5)1.3.1单线数字温度计DSl8B20 介绍 (4)1.3.2 DSl8B20 工作过程及时序 (5)1.3.3 DS18B20连接图 (5)1.4温度显示部分 (7)1.5 温度设定部分 (7)1.6 光耦器件 (8)1.6.1光电耦合器件简介 (7)1.6.2 光电隔离技术的应用 (7)1.6.3 光耦器件MOC3040 (8)1.7可控硅 (10)1.7.1可控硅简介 (8)2 PID算法 (13)2.1 PID算法简介 (13)2.2 PID算法的程序设计 (15)2.3 PID算法参数整定方法 (16)3软件设计 (19)3.1PID控制流程 (19)3.2系统软件设计总流程图 (20)4结语 (21)参考文献 (23)致谢 (20)附录 (25)西安外事学院本科毕业设计(论文)前言温度控制已成为工业生产、科研领域中很重要的一个环节, 能否成功地将温度控制在需要的范围内关系到整个工作的成败。
摘要温炉控制系统是工业控制中比较典型的控制系统,它具有明显的滞后特性,需要快速准确的获取和控制实时温度,一般控制器很难获得满意效果。
而采用可编程控制器进行控制具有控制方便、简单和灵活性大等优点。
因此,本文就是采用PLC实现对炉温的控制。
根据炉温控制系统的特点和原理,本文对控制器进行了硬件和软件设计,分别介绍了PLC选型、输入通道模块、输出通道模块、温度显示模块、系统的资源分配以及外部接线图,采用STEP7软件对系统进行设计,编写出相应的梯形图程序,采用PID 控制方法对其进行研究,实现PID控制器参数的在线调整,通过触摸屏的设计,能够实时的反应出温度的变化曲线。
最后进一步增加了系统在硬件和软件两个方面的抗干扰能力的设计,从而使系统具有更好的稳定性。
关键字:炉温控制;可编程控制器;触摸屏;PID控制目录1 绪论 (1)1.1炉温控制系统的目的和意义 (1)1.2国内外炉温控制的发展情况 (1)1.3 PLC可编程控制器简介 (5)1.4课题研究的主要内容 (6)2 系统的总体设计方案 (8)2.1加热炉温度控制系统基本构成 (8)2.2加热炉控制系统的方案比较 (8)2.2.1 PLC控制与继电器控制的比较 (8)2.2.2 系统控制算法的确定 (9)2.3系统的总体实现 (10)3 系统的硬件配置 (11)3.1 PLC机型的选择 (11)3.1.1 S7-200 PLC主要组成部分 (11)3.1.2 S7-200 PLC的主要性能指标 (12)3.2硬件的组成 (13)3.2.1 CPU处理模块 (13)3.2.2 输入通道模块 (14)3.2.3 输出通道模块 (15)3.2.4 温度显示模块 (16)3.3系统的资源的分配及外部接线图 (17)4 系统的软件设计 (19)4.1 PID控制算法的研究 (19)4.2 K型热电偶分度电压拟合 (22)4.3炉温控制程序的设计 (23)4.3.1 主程序设计 (24)4.3.2 子程序设计 (24)4.3.3 中断程序设计 (25)4.4炉温控制PID参数的整定 (28)4.5系统调试 (29)5 触摸屏的实现 (30)5.1触摸屏的概述 (30)5.2触摸屏窗口的设计 (32)6 PLC控制系统抗干扰分析 (35)6.1 PLC控制系统可靠性分析 (35)6.2 提高PLC控制系统可靠性的措施 (35)7 结论 (38)经济分析 (39)致谢 (40)参考文献 (41)附录І炉温控制系统的梯形图程序 (42)1 绪论1.1炉温控制系统的目的和意义温度控制系统是工业控制中比较典型的控制系统,它是一个一阶纯滞后惯性系统,具有明显的滞后特性,对于需要快速准确的获取和控制实时温度的场合(如制药、化工、石油、食品加工等)采用一般的控制方法很难获得满意的控制效果。
在定值控制问题中,如果控制精度要求不高,一般采用双位调节法,不用PID。
但如果要求控制精度高,而且要求波动小,响应快,那就要用PID调节或更新的智能调节。
调节器是根据设定值和实际检测到的输出值之间的误差来校正直接控制量的,温度控制中的直接控制量是加热或制冷的功率。
PID调节中,用比例环节(P)来决定基本的调节响应力度,用微分环节(D)来加速对快速变动的响应,用积分环节(I)来消除残留误差。
PID调节按基本理论是属于线性调节。
但由于直接控制量的幅度总是受到限定,所以在实际工作过程中三个调节环节都有可能使控制量进入受限状态。
这时系统是非线性工作。
手动对PID进行整定时,总是先调节比例环节,然后一般是调节积分环节,最后调节微分环节。
温度控制中控制功率和温度之间具有积分关系,为多容系统,积分环节应用不当会造成系统不稳定。
许多文献对PID整定都给出推荐参数。
PID是依据瞬时误差(设定值和实际值的差值)随时间的变化量来对加热器的控制进行相应修正的一种方法!!!如果不修正,温度由于热惯性会有很大的波动.大家讲的都不错. 比例:实际温度与设定温度差得越大,输出控制参数越大。
例如:设定温控于60度,在实际温度为50和55度时,加热的功率就不一样。
而20度和40度时,一般都是全功率加热.是一样的. 积分:如果长时间达不到设定值,积分器起作用,进行修正积分的特点是随时间延长而增大.在可预见的时间里,温度按趋势将达到设定值时,积分将起作用防止过冲! 微分:用来修正很小的振荡. 方法是按比例.微分.积分的顺序调.一次调一个值.调到振荡范围最小为止.再调下一个量.调完后再重复精调一次. 要求不是很严格.先复习一下P、I、D的作用,P就是比例控制,是一种放大(或缩小)的作用,它的控制优点就是:误差一旦产生,控制器立即就有控制作用,使被控量朝着减小误差方向变化,控制作用的强弱取决于比例系数Kp。
举个例子:如果你煮的牛奶迅速沸腾了(你的火开的太大了),你就会立马把火关小,关小多少就取决于经验了(这就是人脑的优越性了),这个过程就是一个比例控制。
PID控制原理与参数的整定方法1.比例控制有经验的操作人员手动控制电加热炉的炉温,可以获得非常好的控制品质,PID控制与人工控制的控制策略有很多相似的地方。
下面介绍操作人员怎样用比例控制的思想来手动控制电加热炉的炉温。
假设用热电偶检测炉温,用数字仪表显示温度值。
在控制过程中,操作人员用眼睛读取炉温,并与炉温给定值比较,得到温度的误差值。
然后用手操作电位器,调节加热的电流,使炉温保持在给定值附近。
操作人员知道炉温稳定在给定值时电位器的大致位置(我们将它称为位置L),并根据当时的温度误差值调整控制加热电流的电位器的转角。
炉温小于给定值时,误差为正,在位置L的基础上顺时针增大电位器的转角,以增大加热的电流。
炉温大于给定值时,误差为负,在位置L的基础上反时针减小电位器的转角,并令转角与位置L的差值与误差成正比。
上述控制策略就是比例控制,即PID 控制器输出中的比例部分与误差成正比。
闭环中存在着各种各样的延迟作用。
例如调节电位器转角后,到温度上升到新的转角对应的稳态值时有较大的时间延迟。
由于延迟因素的存在,调节电位器转角后不能马上看到调节的效果,因此闭环控制系统调节困难的主要原因是系统中的延迟作用。
比例控制的比例系数如果太小,即调节后的电位器转角与位置L的差值太小,调节的力度不够,使系统输出量变化缓慢,调节所需的总时间过长。
比例系数如果过大,即调节后电位器转角与位置L的差值过大,调节力度太强,将造成调节过头,甚至使温度忽高忽低,来回震荡。
增大比例系数使系统反应灵敏,调节速度加快,并且可以减小稳态误差。
但是比例系数过大会使超调量增大,振荡次数增加,调节时间加长,动态性能变坏,比例系数太大甚至会使闭环系统不稳定。
单纯的比例控制很难保证调节得恰到好处,完全消除误差。
2.积分控制PID控制器中的积分对应于图1中误差曲线与坐标轴包围的面积(图中的灰色部分)。
PID控制程序是周期性执行的,执行的周期称为采样周期。
计算机的程序用图1中各矩形面积之和来近似精确的积分,图中的TS就是采样周期。
基于模糊免疫自适应PID的工业电炉多点温度协调控制蔡志端;毛建华;王培良【摘要】本文针对工业电炉炉温大迟滞、大惯性、模型不确定性等特点以及工件加工过程中对温度精度和均匀性要求,提出基于模糊免疫自适应PID的工业电炉区内多点温度协调控制算法.以温度设置值、炉内多点温度实际值、同区多点温差等为输人参数,采用模糊隶属函数和免疫反馈原理构建模糊算法对PID控制器参数进行自整定,PID控制器输出量控制工作区多个加热管实际输出功率,使炉内温度环境达到工件加工要求.实验结果表明该控制方法满足工业电炉温度控制精度、温度均匀性等要求,提升了加工工件质量.【期刊名称】《制造业自动化》【年(卷),期】2013(035)001【总页数】4页(P40-43)【关键词】工业电炉;温度;模糊免疫PID;协调控制【作者】蔡志端;毛建华;王培良【作者单位】湖州师范学院信息与工程学院,湖州313000【正文语种】中文【中图分类】TP2770 引言工业电炉是一种工业热处理设备,主要用于机械、冶金等行业的零部件加工,这些行业都要依靠热处理加工过程的质量提升市场竞争力[1]。
为满足加工工件性能指标,要求炉内温度波动范围窄,且区内温度分布均匀。
工业电炉一般会设置多个加热区,每个区安装电加热管,各区独立加热,这样有利于控制炉内温度的均匀性分布。
工业电炉加热控制为一个非线性、大惯性,大滞后过程,难以用精确数学模型来描述。
针对以上特点,国内外学者提出了众多温度控制方法。
如有基于神经网络算法[2,3]、PID算法[4]、模糊控制算法等智能算法[5,6],并取得相应效果。
但目前针对工业电炉温度控制的研究,主要集中在温度精度控制,而对区内温度的均匀性控制并没有深入研究。
在加热过程中,由于炉内空气循环并不流畅,炉区内温度分布可能具有较大不均匀性,若控制不佳,温度的非均匀性会严重影响加工工件质量。
为此,论文以炉内同区多点温度值为控制目标,以区内多个电加热管输出功率为控制量,提出基于模糊免疫自适应PID的多点温度协调控制方法,协调控制炉内同区多温度点,即达到炉内温度的控制精度要求,又可保证炉内温度的均匀性要求,提高加工工件成品率及质量。
在定值掌握问题中,假设掌握精度要求不高,一般承受双位调整法,不用PID。
但假设要求掌握精度高,而且要求波动小,响应快,那就要用PID 调整或更的智能调整。
调整器是依据设定值和实际检测到的输出值之间的误差来校正直接掌握量的,温度掌握中的直接掌握量是加热或制冷的功率。
PID 调整中,用比例环节〔P)来打算根本的调整响应力度,用微分环节〔D)来加速对快速变动的响应,用积分环节〔I)来消除残留误差。
PID 调整按根本理论是属于线性调整。
但由于直接掌握量的幅度总是受到限定,所以在实际工作过程中三个调整环节都有可能使掌握量进入受限状态。
这时系统是非线性工作。
手动对PID 进展整定时,总是先调整比例环节,然后一般是调整积分环节,最终调整微分环节。
温度掌握中掌握功率和温度之间具有积分关系,为多容系统,积分环节应用不当会造成系统不稳定。
很多文献对PID 整定都给出推举参数。
PID 是依据瞬时误差(设定值和实际值的差值)随时间的变化量来对加热器的掌握进展相应修正的一种方法假设不修正,温度由于热惯性会有很大的波动.大家讲的都不错. 比例:实际温度与设定温度差得越大,输出掌握参数越大。
例如:设定温控于60 度,在实际温度为50 和55 度时,加热的功率就不一样。
而20 度和40 度时,一般都是全功率加热.是一样的. 积分:假设长时间达不到设定值,积分器起作用,进展修正积分的特点是随时间延长而增大.在可预见的时间里,温度按趋势将到达设定值时,积分将起作用防止过冲! 微分:用来修正很小的振荡. 方法是按比例.微分.积分的挨次调.一次调一个值.调到振荡范围最小为止.再调下一个量.调完后再重复精调一次. 要求不是很严格.先复习一下P、I、D 的作用,P 就是比例掌握,是一种放大〔或缩小〕的作用,它的掌握优点就是:误差一旦产生,掌握器马上就有掌握作用,使被控量朝着减小误差方向变化,掌握作用的强弱取决于比例系数Kp。
举个例子:假设你煮的牛奶快速沸腾了〔你的火开的太大了〕,你就会立马把火关小,关小多少就取决于阅历了〔这就是人脑的优越性了〕,这个过程就是一个比例掌握。