振动系统固有频率的测量
- 格式:doc
- 大小:245.00 KB
- 文档页数:5
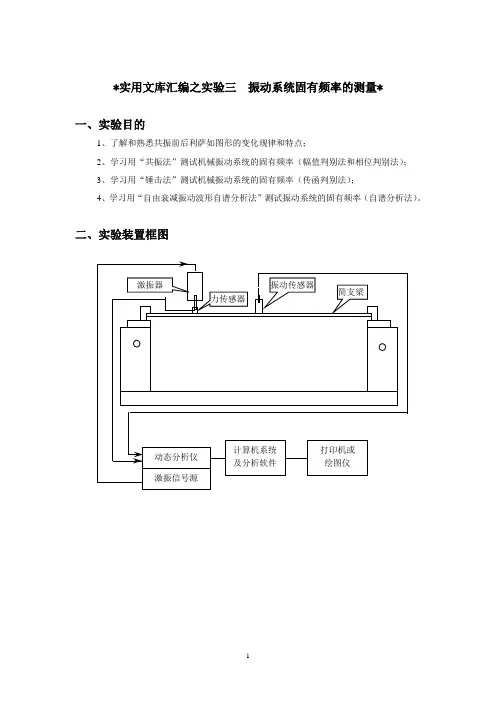
*实用文库汇编之实验三振动系统固有频率的测量*一、实验目的1、了解和熟悉共振前后利萨如图形的变化规律和特点;2、学习用“共振法”测试机械振动系统的固有频率(幅值判别法和相位判别法);3、学习用“锤击法”测试机械振动系统的固有频率(传函判别法);4、学习用“自由衰减振动波形自谱分析法”测试振动系统的固有频率(自谱分析法)。
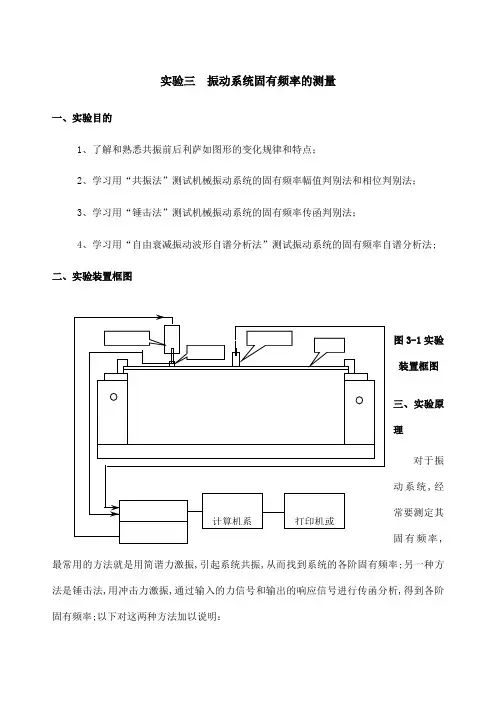
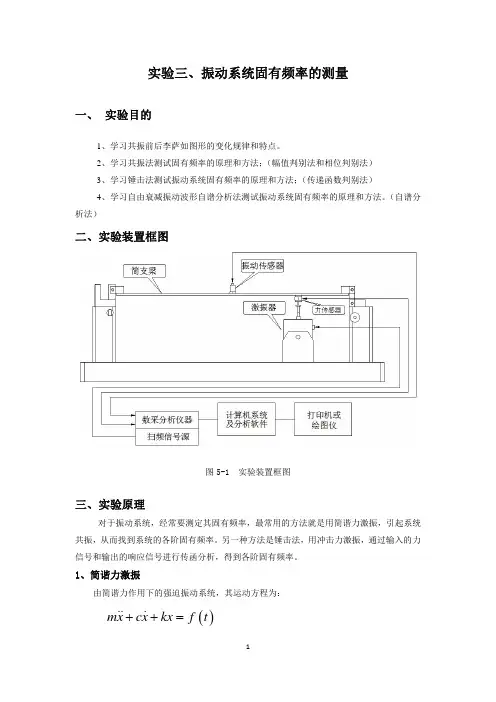
二、实验装置框图图3-1实验装置框图三、实验原理对于振动系统,经常要测定其固有频率,最常用的方法就是用简谐力激振,引起系统共振,从而找到系统的各阶固有频率。
另一种方法是锤击法,用冲击力激振,通过输入的力信号和输出的响应信号进行传函分析,得到各阶固有频率。
以下对这两种方法加以说明:1、简谐力激振简谐力作用下的强迫振动,其运动方程为:t F Kx x C xm e ωsin 0=++ 方程式的解由21X X +这两部分组成:)sin cos (211t w C t w C e X D D t +=-ε21D w w D-=式中1C 、2C 常数由初始条件决定:tw A t w A X e e sin cos 212+=其中()()222222214e eeq A ωεωωωω+--=,()22222242e ee q A ωεωωεω+-=,mF q 0=1X 代表阻尼自由振动基,2X 代表阻尼强迫振动项。
自由振动周期: DD T ωπ2=强迫振动项周期: ee T ωπ2=由于阻尼的存在,自由振动基随时间不断得衰减消失。
最后,只剩下后两项,也就是通常讲的定常强动,即强迫振动部分:()()()tq t q x e eee e eee ωωεωωεωωωεωωωωsin 42cos 4222222222222+-++--=通过变换可写成)sin(ϕ-=t w A X e式中 422222222214)1(/ωωεωωωee q A A A +-=+=⎪⎪⎭⎫ ⎝⎛-==22122e e arctg A A arctg ωωεωϕ设频率比 ωωμe= ,Dw =ε 代入公式 则振幅 222224)1(/Dq A μμω+-=滞后相位角: 212μμϕ-=D arctg 因为 xst KF m K m F q ===002//ω为弹簧受干扰力峰值作用引起的静位移,所以振幅A 可写成:st st x x DA .4)1(12222βμμ=+-=其中β称为动力放大系数:2222411Dμμβ+-=)(动力放大系数β是强迫振动时的动力系数即动幅值与静幅值之比。
单⾃由度振动系统固有频率及阻尼的测定-实验报告单⾃由度振动系统固有频率及阻尼的测定⼀、实验⽬的1、掌握测定单⾃由度系统固有频率、阻尼⽐的⼏种常⽤⽅法2、掌握常⽤振动仪器的正确使⽤⽅法⼆、实验内容1、根据单⾃由度系统固有频率公式,估算⽔平振动台⾯的等效质量2、记录⽔平振动台的⾃由衰减振动波形3、测定⽔平振动台在简谐激励下的幅频特性4、测定⽔平振动台在简谐激励下的相频特性5、根据上⾯测得的数据,计算出⽔平振动台的固有频率、阻尼⽐三、实验原理单⾃由度振动系统是⼀种简单且常见的振动系统模型。
本实验中的振动系统由台⾯、⽀撑弹簧⽚及电磁阻尼器组成的⽔平振动台(见图四),可视为单⾃由度系统,它在瞬时或持续的⼲扰⼒作⽤下,台⾯可沿⽔平⽅向振动。
与之前常见的质量弹簧系统不同,本实验中单⾃由度振动系统的等效质量、刚度均属于未知量。
且通过观察不难发现,银⽩⾊的⽔平振动台⾯⽆法单独取出以测量质量。
这⼀系统反应了⼤多数实际振动系统的特性——即难以分别得到其准确的等效质量、刚度的数值,再通过理论计算得到固有频率。
因此通过实验的⽅式直接测量系统整体的固有频率成为⼀种⾮常重要⽽可靠的研究⼿段,同时系统的等效质量和刚度,也可以由测量结果推导得出。
假设实验使⽤的单⾃由度振动系统中,⽔平振动台⾯的等效质量为eq m ,系统的等效刚度为eq k ,在⽆阻尼或阻尼很⼩时,系统⾃由振动频率可以写作eq eqm k f π21=。
这⼀频率容易通过实验的⽅式测得,我们将其记作f ';此时在⽔平振动台⾯上加⼀个已知质量0m ,测得新系统的⾃由振动频率为f ''。
则⽔平振动台⾯的等效质量为eq m 可以通过以下关系得到:2eq 0eq f f m m m ???? ??'''=+。
当单⾃由度振动系统具有粘滞阻尼时,⾃由振动微分⽅程的标准形式为022=++q p q n q,式中q 为⼴义坐标,n 为阻尼系数,eq eq m C n /2=,eq C 为⼴义阻⼒系数,eq m 为等效质量;p 为固有的圆频率,eq eq m K p /2=,eq K 为等效刚度。
振动系统各阶固有频率及模态测试探究性实验设计1. 引言1.1 引言振动系统是指具有振动特性的物体或系统,它们会在外力作用下发生振动。
振动系统的研究对于理解和分析各种物体或结构的振动行为具有重要意义。
在实际工程中,振动系统的研究和分析通常会涉及到固有频率和模态测试。
固有频率是指一个振动系统在没有外力作用下自发振动的频率。
固有频率的大小与系统的质量、刚度和阻尼等因素有关,它反映了系统振动的特性和稳定性。
固有频率的测定对于系统的性能分析和设计优化具有重要意义。
模态测试是一种用于测定振动系统各阶固有频率和振动模态的方法。
通过模态测试可以获得系统各个振动模态的振幅、相位和频率等信息,从而帮助分析系统的振动特性和优化设计。
本实验旨在探究振动系统各阶固有频率及模态的测试方法和实验设计。
通过实验可以深入理解振动系统的工作原理和特点,为实际工程应用提供参考。
在本文中,将介绍振动系统的概念和特点、固有频率的含义和重要性、模态测试的意义和方法、实验设计的步骤和要点以及实验结果分析与讨论,旨在全面了解振动系统的性能和优化方法。
2. 正文2.1 振动系统的概念和特点振动系统是由质量、弹簧和阻尼器构成的物理系统,当外力作用于系统时,系统会发生振动。
振动系统具有以下特点:振动系统具有固有频率,即系统在没有外力作用下的自然频率,这取决于系统的质量和弹性系数;振动系统可能出现共振现象,即在外力频率接近系统的固有频率时,系统会受到更大的振幅影响;振动系统具有不同的模态,即系统在不同方式振动时呈现不同的振动模式。
振动系统的概念和特点对于工程领域具有重要意义。
通过对振动系统的研究,可以更好地了解系统的动态特性,预测系统的振动响应,并设计有效的振动控制措施。
振动系统的特点也直接影响到系统的性能和稳定性,在工程实践中需要认真考虑和分析。
在进行振动系统的实验设计时,需要充分考虑系统的特点,合理选择实验方法和参数,以获取准确和可靠的实验数据。
振动系统固有频率的测试实验指导书一.实验目的1.学习振动系统固有频率的测试方法;2.了解DASP-STD软件;3.学习锤击法测试振动系统固有频率的原理与方法;(传函判别法)二.实验仪器及简介ZJY-601T型振动教学实验台,ZJY-601T型振动教学试验仪,采集仪,DASP-STD(DASP Standard 标准版)软件,微机。
1.ZJY-601T型振动教学实验台:主要由底座、桥墩型支座、简支梁、悬臂梁、等强度梁、偏心电动机、调压器、接触式激振器及支座、非接触式激振器、磁性表座、减振橡胶垫、减振器、吸振器、悬索轴承装置、配重锤、钢丝、圆板、质量块等部件和辅助件组成。
与ZJY-601T型振动教学实验仪配套,完成各种振动教学实验。
它以力学和电学参数为设计出发点,力学模型合理,带有10种典型力学结构,多种激振、减振和拾振方式。
力学结构有:两端简支梁、两端固支梁、等截面悬臂梁、等强度悬臂梁(变截面)、复合材料梁、圆板、单自由度质量-弹簧系统、两自由度质量-弹簧系统、三自由度质量-弹簧系统、悬索。
激励方式有:脉冲锤击法、正弦激励(接触、非接触式)、正弦扫描(接触、非接触式)、偏心质量、支承运动。
减振和隔振有:主动隔振、被动隔振、阻尼减振、动力减振(单式)、动力减振(复式)。
传感器类型有:压电加速度传感器、磁电式速度传感器、电涡流位移传感器、力传感器(力锤中)。
2.ZJY-601T型振动教学试验仪:由双通多功能振动测试仪、扫频信号发生器、功率放大器组成,并集成了数据采集器,可连接压电式加速度传感器、磁电式速度传感器或电涡流传感器,对被测物体的振动加速度、速度和位移进行测量。
可将每个通道所测振动信号转换成与之相对应的0~5V AC电压信号输出,供计算机使用。
扫频信号发生器的输出频率在手动档时,可通过旋钮在0.1~1000Hz范围内连续调节;在自动档时,可从10到1000Hz自动变换,扫频时间可由电位器控制,3s~240s连续可调,激振频率可由液晶显示器显示。
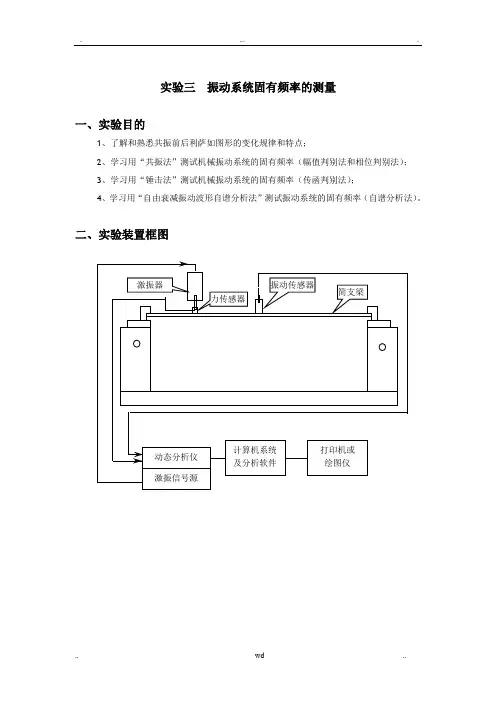
实验三振动系统固有频率的测量一、实验目的1、了解和熟悉共振前后利萨如图形的变化规律和特点;2、学习用“共振法”测试机械振动系统的固有频率幅值判别法和相位判别法;3、学习用“锤击法”测试机械振动系统的固有频率传函判别法;4、学习用“自由衰减振动波形自谱分析法”测试振动系统的固有频率自谱分析法;二、实验装置框图装置框图三、实验原理对于振动系统,经常要测定其固有频率,最常用的方法就是用简谐力激振,引起系统共振,从而找到系统的各阶固有频率;另一种方法是锤击法,用冲击力激振,通过输入的力信号和输出的响应信号进行传函分析,得到各阶固有频率;以下对这两种方法加以说明:1、简谐力激振简谐力作用下的强迫振动,其运动方程为:方程式的解由21X X +这两部分组成:式中1C 、2C 常数由初始条件决定:其中()()222222214e eeq A ωεωωωω+--=,()22222242eee q A ωεωωεω+-=,mF q 0=1X 代表阻尼自由振动基,2X 代表阻尼强迫振动项;自由振动周期: DD T ωπ2=强迫振动项周期: ee T ωπ2=由于阻尼的存在,自由振动基随时间不断得衰减消失;最后,只剩下后两项,也就是通常讲的定常强动,即强迫振动部分: 通过变换可写成式中 422222222214)1(/ωωεωωωee q A A A +-=+=设频率比 ωωμe=,Dw =ε 代入公式则振幅 222224)1(/Dq A μμω+-=滞后相位角: 212μμϕ-=D arctg因为 xst KF m K m F q ===02//ω为弹簧受干扰力峰值作用引起的静位移,所以振幅A 可写成:st st x x DA .4)1(12222βμμ=+-=其中β称为动力放大系数: 2222411Dμμβ+-=)(动力放大系数β是强迫振动时的动力系数即动幅值与静幅值之比;这个数值对拾振器和单自由度体系的振动的研究都是很重要的;当1=μ,即强迫振动频率和系统固有频率相等时,动力系数迅速增加,引起系统共振,由式: )sin(ϕ-=t w A X e可知,共振时振幅和相位都有明显变化,通过对这两个参数进行测量,我们可以判别系统是否达到共振动点,从而确定出系统的各阶振动频率;一幅值判别法在激振功率输出不变的情况下,由低到高调节激振器的激振频率,通过示波器,我们可以观察到在某一频率下,任一振动量位移、速度、加速度幅值迅速增加,这就是机械振动系统的某阶固有频率;这种方法简单易行,但在阻尼较大的情况下,不同的测量方法的出的共振动频率稍有差别,不同类型的振动量对振幅变化敏感程度不一样,这样对于一种类型的传感器在某阶频率时不够敏感;二相位判别法相位判别是根据共振时特殊的相位值以及共振前后相位变化规律所提出来的一种共振判别法;在简谐力激振的情况下,用相位法来判定共振是一种较为敏感的方法,而且共振是的频率就是系统的无阻尼固有频率,可以排除阻尼因素的影响;激振信号为:t F F ωsin = 位移信号为:)sin(ϕω-=t Y y速度信号为:y=ωYcos ωt-ϕ 加速度信号为:y=-ω2sin ωt-ϕ 三位移判别法将激振动信号输入到采集仪的第一通道即x 轴,位移传感器输出信号或通过ZJT-601A 型振动教学仪积分档输出量为位移的信号输入第二通道即y 轴,此时两通道的信号分别为:激振信号为:F=Fsin ωt 位移信号为:y=Y sin ωt-ϕ共振时,ω=ωn ,ϕ=π/2,x 轴信号和y 轴信号的相位差为π/2,根据利萨如图原理可知,屏幕上的图象将是一个正椭圆;当ω略大于ωn 或略小于ωn 时,图象都将由正椭圆变为斜椭圆,其变化过程如下图所示;因此图象由斜椭圆变为正椭圆的频率就是振动体的固有频率;ω<ωn ω=ωn ω>ωn图3-2 用位移判别法共振的利萨如图形四速度判别共振将激振动信号输入到采集仪的第一通道即x 轴,速度传感器输出信号或通过ZJT-601A 型振动教学仪积分档输出量为位移的信号输入第二通道即y 轴,此时两通道的信号分别为:激振信号为:F=Fsin ωt速度信号为:y=ωYcos ωt-ϕ 共振时,ω=ωn ,ϕ=π/2,x 轴信号和y 轴信号的相位差为π/2,根据利萨如图原理可知,屏幕上的图象将是一条直线;当ω略大于ωn 或略小于ωn 时,图象都将由直线变为斜椭圆,其变化过程如下图所示;因此图象由斜椭圆变为直线的频率就是振动体的固有频率;ω<ωn ω=ωn ω>ωn图3-3 用速度判别法共振的利萨如图形五加速度判别共振将激振动信号输入到采集仪的第一通道即x 轴,加速度传感器输出信号输入第二通道即y 轴,此时两通道的信号分别为:激振信号为:t F F ωsin =加速度信号为:)sin(2ϕωω--=t y共振时,n ωω=,2/πϕ=,x 轴信号和y 轴信号的相位差为2/π,根据利萨如图原理可知,屏幕上的图象将是一个正椭圆;当ω 略大于n ω或略小于n ω时,图象都将由正椭圆变为斜椭圆,其变化过程如下图所示;因此图象由斜椭圆变为正椭圆的频率就是振动体的固有频率;ω<ωn ω=ωnω>ωn图3-4 用加速度判别法共振的利萨如图形三、传函判别法频率响应函数判别法——动力放大系数判别法通常我们认为振动系统为线性系统,用一特定已知的激振力,以可控的方法来激励结构,同时测量输入和输出信号,通过传函分析,得到系统固有频率;响应与激振力之间的关系可用导纳表示:Y的意义就是幅值为1的激励力所产生的响应;研究Y与激励力之间的关系,就可得到系统的频响特性曲线;在共振频率下的导纳值迅速增大,从而可以判别各阶共振频率;四、自谱分析法当系统做自由衰减振动时包括了各阶频率成分,时域波形反映了各阶频率下自由衰减波形的线性叠加,通过对时域波形做FFT转换就可以得到其频谱图,从而我们可以从频谱图中各峰值处得到系统的各阶固有频率;四、实验方法一、幅值判别法测量1、安装仪器把接触式激振器安装在支架上,调节激振器高度,让接触头对简支梁产生一定的预压力,使激振杆上的红线与激振动器端面平齐为宜,把激振器的信号输入端用连接线接到DH1301扫频信号源的输出接口上;把加速度传感器粘贴在简支梁上,输出信号接到DH59XX的振动测试通道;2、开机打开仪器电源,进入DAS2003数采分析软件,设置采样率,连续采集,输入传感器灵敏度、设置量程范围,在打开的窗口内选择接入信号的测量通道;清零后开始采集数据;3、测量打开DH1301扫频信号源的电源开关,调大输出电压,注意不要过载,手动调节输出信号的频率,从0开始调节,当简支梁产生振动,振动量最大时,保持该频率一段时间,记录下此时信号源的显示频率;继续增大频率可得到高阶振动频率;二、相位判别法1、将激励信号源DH1301的输出端信号接入采集仪的应变测试通道X轴,或将力传感器输出信号接采集仪器的振动测试通道,加速度传感器输出信号接采集仪器的振动测试通道Y 轴;加速度传感器放在距离梁端1/3处;2、打开仪器电源,进入DAS2003数采分析软件,在打开的窗口内,点击鼠标右键选择信号的时间波形,选择“X-Y记录仪方式”,利用利萨如图显示两通道的数据;调节信号源的频率,观察图象的变化情况,将加速度传感器换成速度传感器和位移传感器分别测试,观察图象,根据共振时各物理量的判别法原理,来确定共振频率;1、调节DH1301的输出电压来调整激振器的激振力大小,从而调整传感器的输出幅值大小;三、传函判别法测量1、安装仪器把力锤的力传感器输出线接到DH59XX的振动测试通道的1-1通道;把加速度传感器安放在简支梁上,也可把速度传感器,位移传感器安放在简支梁上,输出信号接到另外一个振动测试通道1-2通道;2、开机打开仪器电源,进入DAS2003数采分析软件,设置各项运行参数,采样方式选择瞬态,触发方式选择信号触发, 分析功能选择单输入频响分析功能;3、测量用力锤击简支梁中部,就可看到时域波形,点鼠标右键信号选择,选择频响曲线,频响曲线的第一个峰就是系统的一阶固有频率;后面的几个峰是系统的高阶频率;移动传感器或用力锤敲简支梁的其他部位,再进行测试,记录下各阶固有频率;四、自谱分析法1、安装仪器把加速度传感器安放在简支梁上,输出信号接到振动测试通道1-1通道;2、开机打开仪器电源,进入DAS2003数采分析软件,设置各项运行参数,选择单频响分析功能;3、测量用力锤击简支梁中部,就可看到时域波形,点鼠标右键信号选择,选择自功率谱,就可得到自功率谱曲线,第一个峰就是系统的一阶固有频率;后面的几个峰是系统的高阶频率;移动传感器或用力锤敲简支梁的其他部位,再进行测试,记录下各阶固有频率;五、实验结果与分析i.将用位移、速度、加速度判别共振的结果图分别绘出来;ii.比较各种方法得到的各阶模态频率;。
实验三振动系统固有频率的测量一、实验目的1、了解和熟悉共振前后利萨如图形的变化规律和特点;2、学习用“共振法”测试机械振动系统的固有频率(幅值判别法和相位判别法);3、学习用“锤击法”测试机械振动系统的固有频率(传函判别法);4、学习用“自由衰减振动波形自谱分析法”测试振动系统的固有频率(自谱分析法)。
二、实验装置框图图3-1实验装置框图三、实验原理对于振动系统,经常要测定其固有频率,最常用的方法就是用简谐力激振,引起系统共振,从而找到系统的各阶固有频率。
另一种方法是锤击法,用冲击力激振,通过输入的力信号和输出的响应信号进行传函分析,得到各阶固有频率。
以下对这两种方法加以说明:1、简谐力激振简谐力作用下的强迫振动,其运动方程为:t F Kx x C xm e ωsin 0=++ 方程式的解由21X X +这两部分组成:)sin cos (211t w C t w C e X D D t +=-ε21D w w D -=式中1C 、2C 常数由初始条件决定:tw A t w A X e e sin cos 212+=其中()()222222214e eeq A ωεωωωω+--=,()22222242eee q A ωεωωεω+-=,mF q 0=1X 代表阻尼自由振动基,2X 代表阻尼强迫振动项。
自由振动周期: DD T ωπ2=强迫振动项周期: ee T ωπ2=由于阻尼的存在,自由振动基随时间不断得衰减消失。
最后,只剩下后两项,也就是通常讲的定常强动,即强迫振动部分:()()()tq t q x e eee e eee ωωεωωεωωωεωωωωsin 42cos 4222222222222+-++--=通过变换可写成)sin(ϕ-=t w A X e式中 422222222214)1(/ωωεωωωee q A A A +-=+=⎪⎪⎭⎫ ⎝⎛-==22122e e arctg A A arctgωωεωϕ设频率比 ωωμe= ,Dw =ε 代入公式 则振幅 222224)1(/Dq A μμω+-=滞后相位角: 212μμϕ-=D arctg因为 xst KF m K m F q ===002//ω为弹簧受干扰力峰值作用引起的静位移,所以振幅A 可写成:st st x x DA .4)1(12222βμμ=+-=其中β称为动力放大系数:2222411Dμμβ+-=)(动力放大系数β是强迫振动时的动力系数即动幅值与静幅值之比。
目录一、设计题目 (1)二、设计任务 (1)三、所需器材 (1)四、动态特性测量 (1)1.振动系统固有频率的测量 (1)2.测量并验证位移、速度、加速度之间的关系 (3)3.系统强迫振动固有频率和阻尼的测量 (6)4.系统自由衰减振动及固有频率和阻尼比的测量 (6)5.主动隔振的测量 (9)6.被动隔振的测量 (13)7.复式动力吸振器吸振实验 (18)五、心得体会 (21)六、参考文献 (21)一、设计题目简支梁振动系统动态特性综合测试方法。
二、设计任务1.振动系统固有频率的测量。
2.测量并验证位移、速度、加速度之间的关系。
3.系统强迫振动固有频率和阻尼的测量。
4.系统自由衰减振动及固有频率和阻尼比的测量。
5.主动隔振的测量。
6.被动隔振的测量。
7.复式动力吸振器吸振实验。
三、所需器材振动实验台、激振器、加速度传感器、速度传感器、位移传感器、力传感器、扫描信号源、动态分析仪、力锤、质量块、可调速电机、空气阻尼器、复式吸振器。
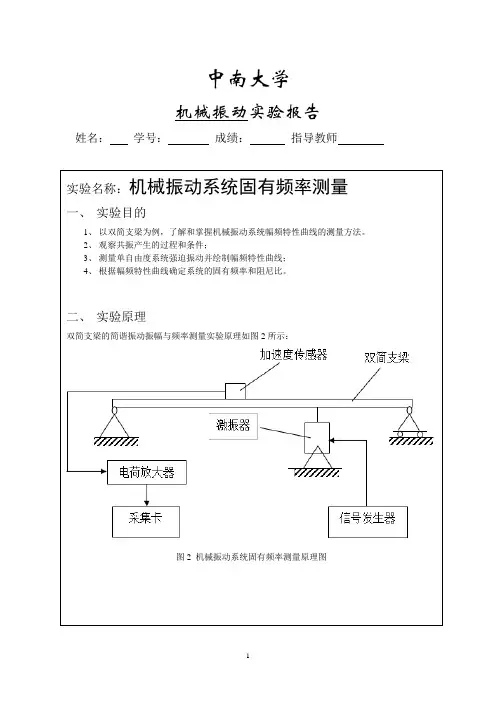
四、动态特性测量1.振动系统固有频率的测量(1)实验装置框图:见(图1-1)(2)实验原理:对于振动系统测定其固有频率,常用简谐力激振,引起系统共振,从而找到系统的各阶固有频率。
在激振功率输出不变的情况下,由低到高调节激振器的激振频率,通过振动曲线,我们可以观察到在某一频率下,任一振动量(位移、速度、加速度)幅值迅速增加,这就是机械振动系统的某阶固有频率。
(图1-1实验装置图)(3)实验方法:①安装仪器把接触式激振器安装在支架上,调节激振器高度,让接触头对简支梁产生一定的预压力,使激振杆上的红线与激振器端面平齐为宜,把激振器的信号输入端用连接线接到DH1301扫频信号源的输出接口上。
把加速度传感器粘贴在简支梁上,输出信号接到数采分析仪的振动测试通道。
②开机打开仪器电源,进入DAS2003数采分析软件,设置采样率,连续采集,输入传感器灵敏度、设置量程范围,在打开的窗口内选择接入信号的测量通道。
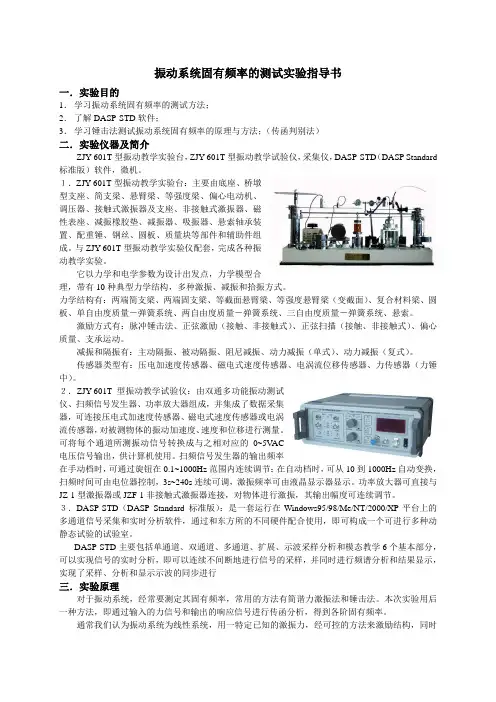
汕头大学实验报告h学习觀讎輔解繃诚竝X学获嗣法脱翩固有孵腹理与方法;幅蓟别腳融判别法)3>学和击刼试嗣靈翻解桶理与方歯借酬别法)三、买验原理对于振动索竈負営要测定其固有频騒辭用的方法就是用删力®^ 到系统的各阶同有解.另一种方決是用锤击法,用冲击力滋扳衣汀1 的力信号和細狮鮒号进疔传酚飙得昭阶国有频転L蒯力激振由附力作用下的强迫翩]系统,其运动方程划mx+Cx+Kx = f sin w J方程式的腰乩勺+兀这二部分紇成; 血=严((?1 co叫f+G in⑴詁)式巾CD rj =UJ Jl-D*Hk團3阻思强址扳动G 甘数E H 初始条件决定 = A sin cu/+ cos to/+ 牝讣;芍代表迥尼n 由振动基•心代表阻尼强迫振动项.自由振动取周期T D =—强述振动项周期7;=—co f由于阻尼的存在,自白振动基随时间不斷地袁减泊先•最后.只剩下后两项.也就是通常讲的定离强动、 只廻卞强追振动部分.即(CD 2 -CD ;)- +牝硏 3沁」+(co 亍心 F + 4 Jco :沏叭'设频率比“二吳C1)则振幅」_g/co7(1-»2)2 +4w :D =g (co 一 軸;)辺垃变换可写成式申茸中x = A siiX 3 / — 屮)£ = Deo 代入上式2Dit(p = __rI -tr因为=FJm/K/m =^ =兀戲弹簧受干扰力峰值作用引起的静位移,所戏扛幅A跡写成■4 — -(X . — P-T ..J(1 一屮尸+4八"其中P称为动力放大系数=--- ------ --------/1_宀十北莎动力放大系数卩是遥迫抚动讨的动力系敌即动枠童与醴堀坐Z比.这几霞置就拾压器杆舉白白度体系的报动的研究都是很重要的「当k = H即强迫ftU黑;车和系统固有频率相等时,动力系数迅屢增加.引起系统共振,由式x = J sin( lx) / - (p)可知:・共抵寸捱幅和贰位擀有明显的变化.遞垃对这炖个参数进行削亘.我们可以判别系统星否达到共抿动点,从iru确崖出系统列各阶推动頻丰•・1)幅隹判丸法在濒抿功車撞岀不变的駕况下、由低到戲诣节黴报器妁激扼數憲*通过示波器.我们可以观察到在某一频率下.任一振动量速度、血逮度)躺蛍迅速増加,这就是机械振动泵统的某阶固有频率. 建即方注简单•易,厂口在阻尼较大的情况下.不同的测st方法得出的共振动频率稍有差别,不同类型的抿动呈对摄幅变化敏感程度不一样.这样对于一种类型的传感蒂在其阶频率时不够敏感.2)相位判别法再位判法是Hi推并撫时持竦的雄位值以及共掘动前后柑位变化址■申所梃击来的一种共撫判貳法□在简潸力津振的错况下,用片'位法来判迄共振是一珅较为敏感的方也*而且共报足的頻泰就是系统的无阳尼固有频部.可以排琛阻尼因責的彩响’Si报估号呀;F = Tsin toZ 位移估号为:j?= Ksinf tor -cp)速度‘舌号为T y=tjFcos(a)r -p)加速度怙兮为: y - -w;} sin(CDZ一tp)(1)位移判别共fti埒飯推动怙号卷入到采集仪的第一迈道4|【'(讪)•位移传感器就出信号或通辽2 J违0 1型匪动教学牧积分档愉汨金为(2移酣倍号输入到第二通道(即Y轴)•此讨阿通道的信号分别为’戲报伯号戈h F=Fsin^住坯估弓为:y =Fsingf-tp)共撮时,如=⑷八(P二一・X轴信号和Y轴信号的相位差为K/2,根据利萨如图原理可知.屏慕匕的图象将适一个正暂區U当⑴賂大于⑴耗或冏小于他」,區象榔将白正鴉岡变为斜巒列,耳变化过程噩下图所示B闵此医躱圧煞商雾睦恢变为正碉囿的頻幸就是抿动体的嵐有频率.罩小乜移判别共戎拘利我如昌形(2) 速嗖判别共抿用滋抿佶号撞入到采集仪的第一通道<UI:X轴).速度传痣梆检出唱号或通过2 J吨0 1躺动教学仅积分档績出量为速度的伯号轮入到第二通道(即y轴人此时两辿道的伯号分别为:徽振倍号为’ F = Fsm^t遠度们弓为:y -(U ¥ casfujr )忑標时・<p = -・\轴信号和¥轴伯号的相位差沟匚,2’根据利萨幼图原理可知,屏幕上的图彖应是一条貞线*当3晤大于或略小于时.医彖都绍白.直线变为斜巒岡.具变化过程如下图所示.因此图姣:弓魁林圜变为直线的频率就是按动体的底有锲車.■»S 5用洼度判别共娠的剧萨扫:划形(3)加速度判别共撫将4嫌信号输入到采集仪的第一通道(即X 轴W 度传感器输出伯号输入到第二通道(即Y 轴). 此时两邇道的信号分别为:眾据信号为’ F=Fsin (i>f加速嘍悩 v A : y = -to ;Y sin ( sr -u j共掘时* tn =UJ ^(p = -. X 轴信号和Y 轴悄号的相位差>j;t 2.根据利萨幼圏原理可知.屏幕上的图躱应是一个正喘側.当CD 瞪大于(叭或略小于CD 」,1胡彖都將日正稠圆变为斜嘀恻.其变化过 程虻下圧萨乐.因就圏象由铁箭圜变为正咂岡的叔率就是摄动体的氏订臧誑=羊鬥 I;「二戈’一 ―一 .< ;9 峯 T2s 传函内虬也I 毁事响应雷歡判别 ——动力放大系数判别祛)通常我们认为振动系统为线性系统,用一特定已知的滋振力.以可控的方法来滋励踣构.同时测豐 输入和输出信号.通过传函分析,得到系统固有频率.响应与澈振力之间的关系可用导纳表示, y = A=厂 2尹 厂妒半F ^(1 - I ;2)2 +4D 2U 2 丨■『Y 的奩义就是蝠竺为I 的澈唏力靳产生的响应”硏:究¥与澈耐力之问的关岳.就可得到系统的频响 特性曲线.在共抿頻率F 的导纳值迅逑增大.从而可以判别幹阶共掘鹤率. 皿、实验步骤一、幅值判别法测量L 安裝仪器耙电动接粒式激撮器安装在底庫上,调节电动接鎚式激振器高度;让接傩头就简支梁产生一定的预 压力,使澈扳杆上的红线与激摄动器朋面平齐为宜.把藏报器的信号输入朗圳连接线接到ZJV60]A^ 撮动載学试验仪的功放输出接口上.把带厳座的加速度传療器故在简支樂匕输出僧号接到ZJY601A 型振动截学试验仪的加速度传感 器输入瑞.功能档住拔至殛囿档的aM 度。
振动频率测试方法一、引言振动频率是描述物体振动状态的重要参数,广泛应用于机械、电子、航空航天等领域。
准确测量振动频率对于确保设备的正常运行和故障诊断具有重要意义。
本文将介绍几种常用的振动频率测试方法,包括机械式测试方法、电子式测试方法和光学式测试方法,并对其优缺点进行分析。
二、机械式测试方法机械式测试方法是一种传统的测量振动频率的方式。
其基本原理是通过将被测物体与一个质量块相连,使其形成一个等效质量系统,并通过改变质量块的位置来改变系统的固有频率。
通过观察系统在不同位置下产生共振现象时的固有频率,即可得到被测物体的振动频率。
机械式测试方法具有简单易行、成本低廉等优点。
然而,由于其需要改变质量块位置来进行测量,因此需要较长时间来得到准确结果,并且在实际应用中存在一定难度。
三、电子式测试方法电子式测试方法利用传感器将被测物体产生的振动转化为电信号,通过电子测量设备进行信号处理,得到振动频率的测量结果。
常用的电子式测试方法包括加速度传感器法、速度传感器法和位移传感器法。
加速度传感器法是最常见的电子式测试方法。
其基本原理是通过将加速度传感器安装在被测物体上,测量物体在不同频率下产生的加速度信号,并通过频谱分析得到振动频率。
加速度传感器法具有响应快、准确性高等优点,广泛应用于工程领域。
速度传感器法和位移传感器法则是通过测量物体产生的速度和位移信号来得到振动频率。
这两种方法相对于加速度传感器法来说具有更高的准确性,但在实际应用中受到安装位置限制。
四、光学式测试方法光学式测试方法利用光学原理进行振动频率测量。
其基本原理是通过将激光束照射在被测物体上,并利用激光干涉仪等设备来检测物体表面反射回来的激光信号,根据干涉现象得到振动频率。
光学式测试方法具有非接触式、高灵敏度等优点,适用于对高精度振动频率的测量。
然而,光学设备的价格较高,使用起来较为复杂,需要专业的操作技术。
五、优缺点比较综合以上介绍的三种振动频率测试方法,它们各自具有不同的优缺点。
实验一:振动系统固有频率的测试一.实验目的1、学习振动系统固有频率的测试方法;2、学习共振动法测试振动固有频率的原理与方法;(幅值判别法和相位判别法)3、学习锤击法测试振动系统固有频率的原理与方法;(传函判别法)二.实验原理(一)、对于振动系统,经常要测定其固有频率,最常用的方法就是用简谐力激振,引起系统共振,从而找到系统的各阶固有频率。
(二)、相位判别法,相位判法是根据共振时特殊的相位值以及共振动前后相位变化规律所提出来的一种共振判别法。
在简谐力激振的情况下,用相位法来判定共振是一种较为敏感的方法,而且共振是的频率就是系统的无阻尼固有频率,可以排除阻尼因素的影响。
若激振信号为:F = F sin wt 位移信号为:y = Y sin(wt -j )速度信号为:=wY cos(wt -j ) 加速度信号为:= -w2Y sin(wt -j)(1)、位移判别共振:激振信号为:F = F sin wt 位移信号为:y = Y sin(wt -j ) 当w 略大于w n或略小于w n时,图象都将由正椭圆变为斜椭圆,因此图象图象由斜椭圆变为正椭圆的频率就是振动体的固有频率。
(2)、速度判别共振:激振信号为:F = F sin wt,速度信号为:=wY cos(wt -j ) 当w 略大于w n或略小于w n时,图象都将由直线变为斜椭圆,因此图象由斜椭圆变为直线的频率就是振动体的固有频率。
(3)、加速度判别共振:激振信号F = F sin wt,加速度信号= -w2Y sin(wt -j) 共振时,屏幕上的图象应是一个正椭圆。
因此图象由斜椭圆变为正椭圆的频率就是振动体的固有频率。
(三)、另一种方法是用锤击法,用冲击力激振,通过输入的力信号和输出的响应信号进行传函分析,得到各阶固有频率。
响应与激振力之间的关系可用导纳表示:Y 的意义就是幅值为1 的激励力所产生的响应。
研究Y 与激励力之间的关系,就可得到系统的频响特性曲线。
汕头大学实验报告
五、实验现象
用相位判别法:
(1)位移判断:
第一阶共振时的利萨如图:第二阶共振时的利萨如图:
第三阶共振时的利萨如图:
(2)速度判别法:
第一阶共振时的利萨如图:第二阶共振时的利萨如图:
第三阶共振时的利萨如图:
(3)加速度判别法:
第一阶共振时的利萨如图:第二阶共振时的利萨如图:
第三阶共振时的利萨如图:
用传递函数判别法:
其实验数据表:
六、实验数据结果和分析
八、实验心得
通过本次实验,懂得了多种方法测量振动系统的固有频率,形象的把理论运用到操作中。
另外的是熟悉了DASP的软件界面,为接下来的实验操作奠定了基础。
固有频率测定方式以下是为大家整理的固有频率测定方式的相关范文,本文关键词为固有频率,测定,方式,,您可以从右上方搜索框检索更多相关文章,如果您觉得有用,请继续关注我们并推荐给您的好友,您可以在交流材料中查看更多范文。
实验三振动系统固有频率的测量一、实验目的1、了解和熟悉共振前后利萨如图形的变化规律和特点;2、学习用“共振法”测试机械振动系统的固有频率(幅值判别法和相位判别法);3、学习用“锤击法”测试机械振动系统的固有频率(传函判别法);4、学习用“自由衰减振动波形自谱分析法”测试振动系统的固有频率(自谱分析法)。
二、实验装置框图图3-1实验装置框图三、实验原理对于振动系统,经常要测定其固有频率,最常用的方法就是用简谐力激振,引起系统共振,从而找到系统的各阶固有频率。
另一种方法是锤击法,用冲击力激振,通过输入的力信号和输出的响应信号进行传函分析,得到各阶固有频率。
以下对这两种方法加以说明:1、简谐力激振简谐力作用下的强迫振动,其运动方程为:tFKxxcxmeωsin0=++&&&方程式的解由21xx+这两部分组成:)sincos(211twctwcexDDt+=-ε21DwwD-=式中1c、2c常数由初始条件决定:wAtwAxeesincos212+=其中()()222222214eeqAωεωωωω+--=,()22222 242ee eqAωεωεω+-=,mFq0=1x代表阻尼自由振动基,2x代表阻尼强迫振动项。
自由振动周期:DDTωπ2=强迫振动项周期:eeTωπ2=由于阻尼的存在,自由振动基随时间不断得衰减消失。
最后,只剩下后两项,也就是通常讲的定常强动,即强迫振动部分:()()()tqtqxeeeeeeeeωωεωωεωωωεωωωωsin42cos4222222222222+-++--=通过变换可写成)sin(?-=twAxe式中422222222214)1(/ωωεωωωeeqAAA+-=+=??????-==22122eearctgAAarctgωωεω?设频率比ωωμe=,Dw=ε代入公式则振幅222224)1(/DqAμμω+-=滞后相位角:212μμ?-=Darctg因为xstKFmKmFq===002//ω为弹簧受干扰力峰值作用引起的静位移,所以振幅A可写成:ststxxDA.4)1(12222βμμ=+-=其中β称为动力放大系数:2222411Dμμβ+-=)(动力放大系数β是强迫振动时的动力系数即动幅值与静幅值之比。
一、实验目的
1、了解和熟悉共振前后利萨如图形的变化规律和特点;
2、学习用“共振法”测试机械振动系统的固有频率(幅值判别法和相位判别法);
3、学习用“锤击法”测试机械振动系统的固有频率(传函判别法);
4、学习用“自由衰减振动波形自谱分析法”测试振动系统的固有频率(自谱分析法)。
二、实验装置框图
图1 实验装置框图
三、实验原理
对于振动系统,经常要测定其固有频率,最常用的方法就是用简谐力激振,引起系统共振,从而找到系统的各阶固有频率。
另一种方法是锤击法,用冲击力激振,通过输入的力信号和输出的响应信号进行传函分析,得到各阶固有频率。
以下对这两种方法加以说明:
1、简谐力激振
简谐力作用下的强迫振动,其运动方程为:
方程式的解由这两部分组成:
式中常数由初始条件决定:
,
其中:
代表阻尼自由振动基,代表阻尼强迫振动项。
自由振动周期:,强迫振动项周期:
由于阻尼的存在,自由振动基随时间不断得衰减消失。
最后,只剩下后两项,也就是通常讲的定常强动,即强迫振动部分:
通过变换可写成:
式中:
,
设频率比代入公式
则振幅:,滞后相位角:
因为为弹簧受干扰力峰值作用引起的静位移,所以振幅A可写成:
其中称为动力放大系数:
动力放大系数β是强迫振动时的动力系数即动幅值与静幅值之比。
这个数值对拾振器和单自由度体系的振动的研究都是很重要的。
当,即强迫振动频率和系统固有频率相等时,动力系数迅速增加,引起系统共振,由式:
可知,共振时振幅和相位都有明显变化,通过对这两个参数进行测量,我们可以判别系统是否达到共振动点,从而确定出系统的各阶振动频率。
(一)幅值判别法
在激振功率输出不变的情况下,由低到高调节激振器的激振频率,通过示波器,我们可以观察到在某一频率下,任一振动量(位移、速度、加速度)幅值迅速增加,这就是机械振动系统的某阶固有频率。
这种方法简单易行,但在阻尼较大的情况下,不同的测量方法的出的共振动频率稍有差别,不同类型的振动量对振幅变化敏感程度不一样,这样对于一种类型的传感器在某阶频率时不够敏感。
(二)相位判别法
相位判别是根据共振时特殊的相位值以及共振前后相位变化规律所提出来的一种共振判别法。
在简谐力激振的情况下,用相位法来判定共振是一种较为敏感的方法,而且共振是的频率就是系统的无阻尼固有频率,可以排除阻尼因素的影响。
激振信号为:
位移信号为:
速度信号为:
加速度信号为:
(三)位移判别法
将激振动信号输入到采集仪的第一通道(即x轴),位移传感器输出信号或通过ZJT-601A型振动教学仪积分档输出量为位移的信号输入第二通道(即y轴),此时两通道的信号分别为:
激振信号为:
位移信号为:
共振时,,x轴信号和y轴信号的相位差为π/2,根据利萨如图原理可知,屏幕上的图象将是一个正椭圆。
当ω略大于ωn或略小于ωn时,图象都将由正椭圆变为斜椭圆,其变化过程如下图所示。
因此图象由斜椭圆变为正椭圆的频率就是振动体的固有频率。
图2 用位移判别法共振的利萨如图形
(四)速度判别共振
将激振动信号输入到采集仪的第一通道(即x轴),速度传感器输出信号或通过ZJT-601A型振动教学仪积分档输出量为位移的信号输入第二通道(即y轴),此时两通道的信号分别为:
激振信号为:
速度信号为:
共振时,,x轴信号和y轴信号的相位差为π/2,根据利萨如图原理可知,屏幕上的图象将是一条直线。
当ω略大于ωn或略小于ωn时,图象都将由直线变为斜椭圆,其变化过程如下图所示。
因此图象由斜椭圆变为直线的频率就是振动体的固有频率。
图3 用速度判别法共振的利萨如图形
(五)加速度判别共振
将激振动信号输入到采集仪的第一通道(即x轴),加速度传感器输出信号输入第二通道(即y轴),此时两通道的信号分别为:
激振信号为:
加速度信号为:
共振时,,x轴信号和y轴信号的相位差为,根据利萨如图原理可知,屏幕上的图象将是一个正椭圆。
当略大于或略小于时,图象都将由正椭圆变为斜椭圆,其变化过程如下图所示。
因此图象由斜椭圆变为正椭圆的频率就是振动体的固有频率。
图4 用加速度判别法共振的利萨如图形
(三)、传函判别法(频率响应函数判别法——动力放大系数判别法)
通常我们认为振动系统为线性系统,用一特定已知的激振力,以可控的方法来激励结构,同时测量输入和输出信号,通过传函分析,得到系统固有频率。
响应与激振力之间的关系可用导纳表示:
Y的意义就是幅值为1的激励力所产生的响应。
研究Y与激励力之间的关系,就可得到系统的频响特性曲线。
在共振频率下的导纳值迅速增大,从而可以判别各阶共振频率。
(四)、自谱分析法
当系统做自由衰减振动时包括了各阶频率成分,时域波形反映了各阶频率下自由衰减波形的线性叠加,通过对时域波形做FFT转换就可以得到其频谱图,从而我们可以从频谱图中各峰值处得到系统的各阶固有频率。