8回转件的平衡
- 格式:pdf
- 大小:198.47 KB
- 文档页数:6
第六章回转件的平衡一.学习指导与提示由于回转件结构形状不对称,制造安装不准确或材质不均匀等原因,在转动时产生的不平衡惯性力和惯性力偶矩致使回转件内部产生附加应力,在运动副上引起了大小和方向不断变化的动压力,降低机械效率,产生振动,影响机械的效能和寿命。
借助于在回转件上附加(或去除)“平衡质量”将不平衡惯性力和惯性力偶矩加以消除或减小,这种措施就是回转件的平衡,它对高速、重载和精密机械极具重要的意义。
学习本章需注意:(1)要熟悉和运用理论力学课程中关于确定构件惯性力和惯性力偶矩以及力系平衡等理论基础;(2)回转件平衡和机械调节速度波动虽然都是为了减轻机械中的动载荷,但却是两类不同性质的问题,不能互相混淆;(3)机械中作往复移动或平面运动的构件也存在平衡惯性力或惯性力偶矩的问题,需要时可查阅相关资料,本章集中讨论回转件的平衡。
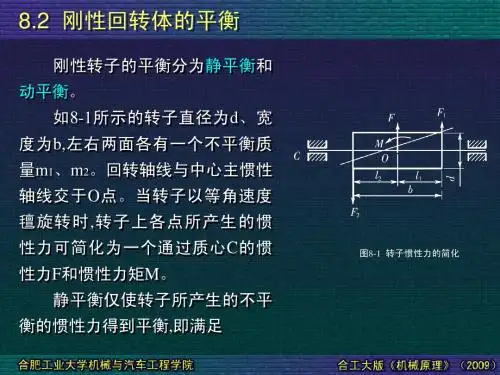
1.回转件的静平衡和动平衡(1) 静平衡对于轴向尺寸较小(宽径比)的盘形回转件,其所有质量均可认为分布在垂直于轴线的同一平面内。
这种回转件的不平衡是因为其质心位置不在回转轴线上,且其不平衡现象在回转轴水平静止搁置时就能显示出来,故又称其为静不平衡。
对于这种不平衡回转件,只需重新调整其质量分布(可通过附加或去除“平衡质量”),使质心移到回转轴线上即可达到平衡。
回转件的静平衡条件为:其惯性力的矢量和应等于零,或质径积的矢量和应等于零。
即或。
(2) 动平衡对于轴向尺寸较大()的回转件,其质量就不能再认为分布在同一平面内。
这种回转件的不平衡,除了存在惯性力的不平衡外,还会存在惯性力偶矩的不平衡。
这种不平衡通常在回转件运转的情况下才能完全显示出来,故称为动不平衡。
对于动不平衡的回转件,必须选择两个垂直于轴线的平衡基面,并在这两个面上适当附加(或去除)各自的平衡质量,使回转件的惯性力和惯性力偶矩都达到平衡。
回转件的动平衡条件为:其惯性力的矢量和等于零,其惯性力偶矩的矢量和也应等于零。
即和。
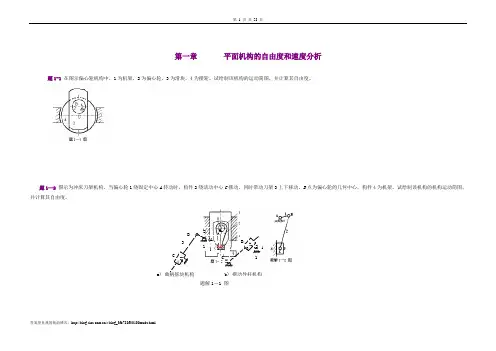
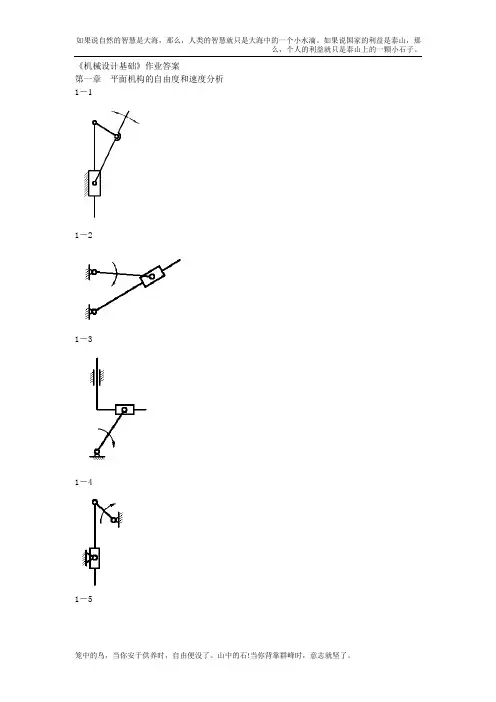
第一章平面机构的自由度和速度分析题1-1在图示偏心轮机构中,1为机架,2为偏心轮,3为滑块,4为摆轮。
试绘制该机构的运动简图,并计算其自由度。
题1—2图示为冲床刀架机构,当偏心轮1绕固定中心A转动时,构件2绕活动中心C摆动,同时带动刀架3上下移动。
B点为偏心轮的几何中心,构件4为机架。
试绘制该机构的机构运动简图,并计算其自由度。
题1—3计算题1-3图a)与图b)所示机构的自由度(若有复合铰链,局部自由度或虚约束应明确指出)。
题1-3图a)题1-3图b)题1—4计算题1—4图a、图b所示机构的自由度(若有复合铰链,局部自由度或虚约束应明确指出),并判断机构的运动是否确定,图中画有箭头的构件为原动件。
题1—5 计算题1—5图所示机构的自由度(若有复合铰链,局部自由度或虚约束应明确指出),并标出原动件。
题1—5图 题解1—5图题1-6 求出图示的各四杆机构在图示位置时的全部瞬心。
第二章 连杆机构题2-1在图示铰链四杆机构中,已知 l BC =100mm ,l CD =70mm ,l AD =60mm ,AD 为机架。
试问:(1)若此机构为曲柄摇杆机构,且AB 为曲柄,求l AB 的最大值;(2)若此机构为双曲柄机构,求l AB 最小值; (3)若此机构为双摇杆机构,求l AB 的取值范围。
题2-2 如图所示的曲柄滑块机构: (1)曲柄为主动件,滑块朝右运动为工作 行程,试确定曲柄的合理转向,并简述其理由;(2)当曲柄为主动件时,画出极位夹角θ,最小传动角g min ; (3)设滑块为主动件,试用作图法确定该机构的死点位置 。
D题2-1图题2-3图示为偏置曲柄滑块机构,当以曲柄为原动件时,在图中标出传动角的位置,并给出机构传动角的表达式,分析机构的各参数对最小传动角的影响。
题2-4设计一曲柄摇杆机构,已知机构的摇杆DC长度为150mm,摇杆的两极限位置的夹角为45°,行程速比系数K=1.5,机架长度取90mm。

第8章 回转件的平衡8.1 复习笔记一、回转件平衡的目的机械中有许多构件是绕固定轴线回转的,这类作回转运动的构件称为回转件(或称转子)。
1.不平衡的原因由于回转件的结构不对称、材质不均匀或是制造不准确等因素,使回转件在转动时产生离心力系的不平衡,使离心力系的合力和合力偶矩不等于零。
2.不平衡的危害(1)在运动副中产生附加的动压力,从而增大构件中的内应力和运动副中的摩擦,加剧运动副的磨损,降低机械效率和使用寿命;(2)使机械产生周期性振动,降低工作可靠性和精度、零件材料的疲劳损坏以及令人厌倦的噪声。
3.回转件平衡的目的调整回转件的质量分布,使转子工作时的离心力达到平衡,以消除附加动压力,尽可能减轻有害振动,改善机构工作性能。
二、回转件的平衡计算根据组成回转件各质量的不同分布,可分两种情况。
1.质量分布在同一回转面内轴向尺寸很小的回转件(B/D <0.2),将其质量看作是分布在同一平面内,如风扇叶轮、飞轮、砂轮等。
对于这类转子,利用在刚性转子上重心的另一侧加上一定的质量,或在重心同侧去掉一些质量,使质心位置落在回转轴线上,从而使离心惯性力达到平衡,即平衡条件为:b 0=+∑=i F F F式中,F 、b F 、i F ∑分别表示总离心力、平衡质量的离心力、原有质量的离心力。
写成质径积的形式为:b b 0=+∑=i i me m r m r特点:若重心不在回转轴线上,则在静止状态下,无论其重心初始在何位置,最终都会落在轴线的铅垂线的下方,这种不平衡现象在静止状态下就能表现出来,故称为静平衡。
静平衡的条件:分布于回转件上各个质量的质径积的向量和为零,即:b b 0+∑=i i m r m r2.质量分布不在同一回转面内 对于轴向尺寸较大(B/D ≥0.2)的回转件,如内燃机中的曲轴和凸轮轴、电机转子、机床主轴等,其质量的分布不能再近似地认为是位于同一回转面内,而应看作分布在垂直于轴线的许多互相平行的回转平面内,离心惯性力将形成一个不汇交空间力系,因此必须使各质量产生的离心力的合力和合力偶都等于零,才能达到平衡,即平衡条件为:0F ∑= 0M ∑=平衡方法:对于动不平衡的转子,无论其具有多少个偏心质量以及分布在多少个回转平面内,只要将各不平衡质量产生的惯性力分别分解到两个选定的平衡基面内,则动平衡即转化为在两平衡基面内的静平衡计算问题。
回转件:机械中有许多构件是绕固定轴线回转的,这类作回转运动的构件称为回转件(转子)F=mrw2回转件平衡的目的:调整回转件的质量分布,使回转件工作时离心力达到平衡,以消除附加动压力,尽可能减轻有害的机械振动静平衡:回转件平衡后,e=0,即总质心与回转轴线重合,此时回转件质量对回转轴线的静力矩mge=0。
该回转件可以在任何位置保持静止,而不会自行转动静平衡条件:分布于该回转件上各个质量的离心力(或径向积)的向量和等于零,即回转件的质心与回转轴线重合动平衡:质量分布不在同一回转面内的回转件,只要分别在任选的两个回转面内各加上适当的平衡质量就能达到完全平衡。
这种类型的平衡称为动平衡动平衡条件:回转件上各个质量的离心力的向量和等于零,而且离心力所引起的力偶矩的向量和也等于零动平衡的回转件一定也是静平衡的,但静平衡的回转件却不一定是动平衡的静平衡试验法:利用静平衡架,找出不平衡质径积的大小和方,并由此确定平衡质量的大小和位置,使质心移到回转轴线上而达到平衡动平衡试验法:令回转件在动平衡试验机上运转,然后在两个选定的平面上分别找出所需平衡质径积的大小和方位,从而使回转件达到动平衡的方法(1)两种振动产生的原因分析:主轴周期性速度波动是由于受到周期性外力,使输入功和输出功之差形成周期性动能的增减,从而使主轴呈现周期性速度波动,这种波动在运动副中产生变化的附加作用力,使得机座产生振动。
而回转体不平衡产生的振动是由于回转体上的偏心质量,在回转时产生方向不断变化的离心力所产生的。
(2)从理论上来说,这两种振动都可以消除。
对于周期性速度波动,只要使输入功和输出功时时相等,就能保证机械运转的不均匀系数为零,彻底消除速度波动,从而彻底消除这种机座振动。
对于回转体不平衡使机座产生的振动,只要满足静或动平衡原理,也可以消除的。
(3)从实践上说,周期性速度波动使机座产生的振动是不能彻底消除的。
因为实际中不可能使输入功和输出功时时相等,同时如果用飞轮也只能减小速度波动,而不能彻底消除速度波动。
8回转件的平衡计算分析在进行8回转件的平衡计算分析之前,我们首先需要了解什么是“回转件”。
回转件是指通过回转运动完成工作的设备或机械元件,如回转轴承、回转机构等。
在进行计算分析时,我们需要考虑回转件的各种力学特性和平衡条件。
一、回转件的力学特性1.质量特性:回转件的质量分布对其平衡性有重要影响,可以通过质心计算质量分布情况。
2.惯性特性:回转件的惯性矩对其回转运动的稳定性有重要影响,可以通过计算其惯性矩来分析。
3.弯曲特性:回转件在回转过程中会产生弯曲应力和变形,这需要通过弹性力学计算来分析。
二、回转件的平衡条件回转件的平衡条件有两个重要方面需要考虑:力矩平衡和转动的平衡。
1.力矩平衡:回转件在回转过程中,各个力矩的合力应为零,即外力矩和内力矩的平衡。
通过对各个力矩进行计算和分析,可以确定平衡状态。
2.转动的平衡:回转件在回转过程中,转动轴上的合外力和合外力矩应为零。
该平衡条件可以通过计算合力和合力矩来检验。
三、回转件平衡计算分析步骤1.确定回转件的几何形状和质心位置。
2.计算回转件的惯性矩。
根据回转件的几何形状和质量分布,可以计算出其惯性矩。
3.分析各个力矩的大小和方向,检验力矩平衡条件。
计算回转件在回转过程中受到的外力矩和内力矩,判断是否平衡。
4.分析回转件转动的平衡条件。
计算合外力和合外力矩,判断是否平衡。
5.若回转件不平衡,则进行平衡校正。
根据不平衡力矩的大小和方向,设计合适的平衡调整方法,如增加平衡块等。
四、注意事项1.在进行回转件平衡计算分析时,需要准确测量和确定回转件的质量、几何形状和质心位置,这对计算结果的准确性至关重要。
2.在设计和制造回转件时,应尽量减小不平衡因素,以提高其平衡性。
3.在进行平衡校正时,需根据具体情况灵活选择平衡调整方法,以达到平衡效果。
总结起来,8回转件的平衡计算分析需要考虑回转件的力学特性和平衡条件,通过计算和分析,确定回转件的平衡状态,并进行必要的平衡校正。

上海交通大学809机械原理与设计专业课考研复习大纲《机械原理与设计》一、绪论•本课程的任务、性质•有关机器、机构、构件和零件的概念•机械设计的基本要求和一般步骤。
二、平面机构的结构分析1 .运动副及其分类2 .平面机构运动简图的绘制3 .平面机构自由度的计算及运用公式计算自由度时应注意的问题(复合铰链、局部自由度、虚约束)•机构具有确定相对运动的条件•速度瞬心法及其在机构速度分析中的应用三、平面连杆机构•平面四杆机构的基本型式及其演化•铰链四杆机构的几个基本问题:急回运动、死点位置、压力角和传动角的特性、曲柄存在条件3 .用图解法和解析法对平面四杆机构进行运动设计四、凸轮机构•凸轮机构的分类和应用2 .从动件的常用运动规律(推程运动角、回程运动角、远休止角、近休止角、升程)3 .按给定运动规律绘制凸轮轮廓线的方法4 .设计凸轮机构时应注意的问题(基圆半径、压力角、滚子半径)五、齿轮机构1 .齿轮机构的类型和特点2 .齿廓啮合的基本定律,渐开线的形成、特性及渐开线齿廓的啮合特性3 .齿轮各部分名称及渐开线标准齿轮的基本尺寸4 .一对渐开线齿轮(直齿圆柱齿轮、斜齿圆柱齿轮、圆锥齿轮)、蜗轮蜗杆的正确啮合条件、连续传动条件、当量齿数、标准渐开线齿廓所在位置、标准模数、标准压力角所在位置等5 .渐开线齿廓的切制原理及根切现象和最少齿数的概念,变位原理6 .斜齿圆柱齿轮机构传动的啮合特点7 .圆锥齿轮机构传动的啮合特点六、轮系1 .轮系的分类和应用2 .定轴轮系传动比的计算3 .周转轮系和混合轮系传动比的计算4 .几种特殊的行星轮系传动七、其他常用机构棘轮机构、槽轮机构、不完全齿轮机构等八、回转件的平衡和调速•回转件平衡的目的及静平衡和动平衡的计算•平面机构平衡的概念•机械运动速度波动和调节的目的和方法•飞轮设计的近似方法•飞轮主要尺寸的确定九、机械零件设计概论1 .机械零件设计的基本要求及一般步骤2 .机械零件的体积强度和表面强度3 .机械零件常用材料及其选择4 .机械零件的结构工艺性及机械零部件的标准化、系列化和通用化十、联接1 .螺纹的主要参数和类型2 .螺旋副的受力分析、效率和自锁3 .螺纹联接的基本类型和螺纹联接件4 .螺纹联接的预紧和防松5 .螺纹联接的强度计算6 .螺栓组联接的受力分析7 .螺旋传动的特点、类型8 .键联接的特点和类型,平键联接的选择原则和强度计算9 .过盈联接十一、齿轮传动和蜗杆传动1 .齿轮轮齿的失效形式和齿轮材料的选择及热处理的方法2 .齿轮传动的受力分析和直齿圆柱齿轮传动的强度计算3 .斜齿圆柱齿轮、直齿圆锥齿轮传动的强度计算4 .齿轮的结构5 .蜗杆传动的特点、类型和应用6 .蜗杆和蜗轮的材料和结构7 .蜗杆传动的受力分析8 .蜗杆传动的效率、润滑和热平衡计算十二、带传动和链传动1 .带传动的类型、工作原理、特点和应用2 .带传动的几何关系计算3 .带传动的受力分析和应力分析,失效形式和计算准则4 .带的型号和尺寸5 .带传动的主要参数、选择和设计计算6 .带的弹性滑动和打滑7 .链传动的特点和应用8 .链传动的运动分析和力分析9 .滚子链的主要参数及其选择10 .链和链轮的材料和结构11 .滚子链的失效形式及其计算十三、轴1 .轴的分类和材料2 .轴的初步强度计算3 .轴的结构设计4 .轴的复合强度校验计算5 .轴的刚度和振动稳定性计算十四、滑动轴承1 .滑动轴承的主要类型、结构和材料2 .滑动轴承的摩擦状态3 .常用的润滑剂和润滑方法4 .不完全液体摩擦滑动轴承的设计5 .动压滑动轴承动压油膜的形成原理和压力分布方程十五、滚动轴承1 .滚动轴承的主要类型、构造、特点和代号2 .滚动轴承的选择3 .滚动轴承的载荷、应力分析,失效形式和承载能力(寿命)计算4 .滚动轴承组合的结构设计十六、联轴器和离合器1 .联轴器的主要类型、结构、标准和选用2 .离合器的主要类型、结构、特点和应用十七、弹簧•弹簧的功用、类型、应用和选择•圆柱螺旋压缩(拉伸)弹簧的主要几何尺寸及参数•圆柱螺旋压缩(拉伸)弹簧的设计主要参考教材:《机械原理》(第四版)孙恒、付则绍主编高教出版社;《机械原理》邹慧君、张春林、李杞仪主编(第二版)高教出版社 2006 《机械设计基础》(第四版)杨可贞、程光蕴主编高教出版社 1999《机械设计及理论》李柱国、许敏主编科学出版社 2003。
《机械设计基础》作业答案第一章平面机构的自由度和速度分析1-11-21-31-41-5自由度为:11 19211)0192(73')'2(3=--=--+⨯-⨯=--+-=FPPPnFHL或:1182632 3=-⨯-⨯=--=HLPPnF1-6自由度为11)01122(93')'2(3=--+⨯-⨯=--+-=FPPPnFHL或:11 22241112832 3=--=-⨯-⨯=--=HLPPnF1-10自由度为:1128301)221142(103')'2(3=--=--⨯+⨯-⨯=--+-=F P P P n F H L或:122427211229323=--=⨯-⨯-⨯=--=H L P P n F1-1122424323=-⨯-⨯=--=H L P P n F 1-13:求出题1-13图导杆机构的全部瞬心和构件1、3的角速度比。
1334313141P P P P ⨯=⨯ωω11314133431==P P ω1-14:求出题1-14图正切机构的全部瞬心。
设s rad /101=ω,求构件3的速度3v 。
s mm P P v v P /20002001013141133=⨯===ω1-15:题1-15图所示为摩擦行星传动机构,设行星轮2与构件1、4保持纯滚动接触,试用瞬心法求轮1与轮2的角速度比21/ωω。
构件1、2的瞬心为P 12P 24、P 14分别为构件2与构件1相对于机架的绝对瞬心1224212141P P P P ⨯=⨯ωω121214122421r P P ==ω 1-16:题1-16图所示曲柄滑块机构,已知:s mm l AB /100=,s mm l BC /250=,s rad /101=ω,求机构全部瞬心、滑块速度3v 和连杆角速度2ω。
在三角形ABC 中,BCAAB BC ∠=sin 45sin 0,52sin =∠BCA ,523cos =∠BCA ,45sin sin BC ABCAC =∠,mm AC 7.310≈s mm BCA AC P P v v P /565.916tan 1013141133≈∠⨯===ω1224212141P P P P ωω=s rad AC P P P P /9.21002101001122412142≈-⨯==ωω1-17:题1-17图所示平底摆动从动件凸轮1为半径20=r 的圆盘,圆盘中心C 与凸轮回转中心的距离mm l AC 15=,mm l AB 90=,s rad /101=ω,求00=θ和0180=θ时,从动件角速度2ω的数值和方向。
机械设计基础知识点详解绪论1、机器的特征:(1)它是人为的实物组合;(2)各实物间具有确定的相对运动;(3)能代替或减轻人类的劳动去完成有效的机械功或转换机械能。
第一章平面机构的自由度和速度分析要求:握机构的自由度计算公式,理解的基础上掌握机构确定性运动的条件,熟练掌握机构速度瞬心数的求法。
1、基本概念运动副:凡两个构件直接接触而又能产生一定相对运动的联接称为运动副。
低副:两构件通过面接触组成的运动副称为低副。
高副:两构件通过点或线接触组成的运动副称为高副。
复合较链:两个以上的构件同时在一处用回转副相联构成的回转副。
局部自由度:机构中常出现的一种与输出构件运动无关的自由度,称为局部自由度或多余自由度。
虚约束:对机构运动不起限制作用的重复约束称为虚约束或称消极约束。
瞬心:任一刚体相对另一刚体作平面运动时,具相对运动可看作是绕某一重合点的转动,该重合点称为瞬时回转中心或速度瞬心,简称瞬心。
如果两个刚体都是运动的,则其瞬心称为相对速度瞬心;如果两个刚体之一是静止的,则其瞬心称为绝对速度瞬心。
2、平面机构自由度计算作平面运动的自由构件具有三个自由度,每个低副引入两个约束,即使构件失去两个自由度;每个高副引入一个约束,使构件失去一个自由度。
计算平面机构自由度的公式:F=3n-2P L-P H机构要具有确定的运动,则机构自由度数必须与机构的原动件数目相等。
即, 机构具有确定运动的条件是F>0,且F等于原动件个数。
3、复合校链、局部自由度和虚约束(a)K个构件汇交而成的复合较链应具有(K-1)个回转副。
(b)局部自由度虽然不影响整个机构的运动,但滚子可使高副接触处的滑动摩擦变成滚动摩擦,减少磨损,所以实际机械中常有局部自由度出现。
(c)虚约束对机构运动虽不起作用,但是可以增加构件的刚性和使构件受力均衡,所以实际机械中虚约束随处可见。
4、速度瞬心如果一个机构由K个构件组成,则瞬心数目为N=K(K-1)/2瞬心位置的确定:(a)已知两重合点相对速度方向,则该两相对速度向量垂线的交点便是两构件的瞬心。