点的复合运动
- 格式:ppt
- 大小:2.16 MB
- 文档页数:83
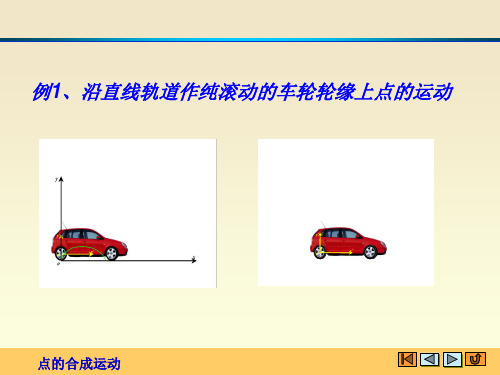

第5章 点的复合运动分析5-1 曲柄OA 在图示瞬时以ω0绕轴O 转动,并带动直角曲杆O 1BC 在图示平面内运动。
若d 为已知,试求曲杆O 1BC 的角速度。
解:1、运动分析:动点:A ,动系:曲杆O 1BC ,牵连运动:定轴转动,相对运动:直线,绝对运动:圆周运动。
2、速度分析:r e a v v v += 0a 2ωl v =;0e a 2ωl v v == 01e 1ωω==AO v BC O (顺时针)5-2 图示曲柄滑杆机构中、滑杆上有圆弧滑道,其半径cm 10=R ,圆心O 1在导杆BC 上。
曲柄长cm 10=OA ,以匀角速rad/s 4πω=绕O 轴转动。
当机构在图示位置时,曲柄与水平线交角 30=φ。
求此时滑杆CB 的速度。
解:1、运动分析:动点:A ,动系:BC ,牵连运动:平移,相对运动:圆周运动,绝对运动:圆周运动。
2、速度分析:r e a v v v +=πω401a =⋅=A O v cm/s ; 12640a e ====πv v v BC cm/s5-3 图示刨床的加速机构由两平行轴O 和O 1、曲柄OA 和滑道摇杆O 1B 组成。
曲柄OA 的末端与滑块铰接,滑块可沿摇杆O 1B 上的滑道滑动。
已知曲柄OA 长r 并以等角速度ω转动,两轴间的距离是OO 1 = d 。
试求滑块滑道中的相对运动方程,以及摇杆的转动方程。
解:分析几何关系:A 点坐标 d t r x +=ωϕcos cos 1 (1) t r x ωϕsin sin 1= (2) (1)、(2)两式求平方,相加,再开方,得: 1.相对运动方程trd r d t r d t rd t r x ωωωωcos 2sin cos 2cos 22222221++=+++=将(1)、(2)式相除,得: 2.摇杆转动方程: dt r tr +=ωωϕcos sin tandt r t r +=ωωϕcos sin arctan5-4 曲柄摇杆机构如图所示。






第5章点的复合运动5.1复合运动中的基本概念5.2复合运动中的运动方程之间的关系5.3复合运动中的速度之间的关系一、目的要求:1、使学生了解速度和加速度的矢量式2、理解绝对运动,相对运动和牵连运动3、使学生对合成运动问题能恰当地选择动点,动系和定系,并能较正确的判定点的绝对,相对和牵连运动4、使学生掌握速度合成定理,并能较正确应用它解点的速度合成运动问题。
二、重点:绝对运动,相对运动和牵连运动的概念,速度合成定理及其应用。
难点:牵连运动,牵连点,动点,动系的选择三、学时安排:4学时四、教学准备:幻灯片五、教学过程导入新课:5.1复合运动中的基本概念一、概念:1、静参考系:固定在地球上的坐标。
2、动参考系:固定在其它相对于地球运动的参考体上的坐标,3、复杂运动:研究物体相对于不同参考系的运动,分析物体相对于不同参考系运动之间的关系,可称为复杂运动和合成运动。
实例之一:小船自左岸边A向后岸边B点运动,河水以均匀速度v运动,小船最终到到右岸的D点。
(1)动系中小船对动系来说是直线运动,从(2)静系中:动系对静系则是直线运动。
小船从A→B,C→D。
(3)同时性:先假设河水不动,则小船从A划到B:在假设人不划船,小船随河水漂流到下游D处。
实际上小船和水是同时运动的,小船动点的运动是上述两个简单运动的合成CAv图5-1 小船的复合运动图5-2车轮轮缘上点M的复合运动实例之二:研究沿地面作直线滚动的车轮轮缘上点M的运动(1)静系中:动点的轨迹是旋轮线车厢作直线运动(2)动系中:M 动点作圆周运动(3)运动的同时性,M点运动和平动是同时进行的,M点既跟随着动系一起平动,又在动系上作圆周运动。
旋轮线就是这两个运动的合成运动的轨迹,轮缘上M点的运动就是这两个简单运动的合成。
实例3:在大梁固定不动时,卷杨小车沿大梁可作直线运动,同时将吊钩上的重物A铅垂向上提升,研究重物的运动称合成运动(1)静系中:A→B(2)动系中:A →A’(3)同时性:点:A →A’小车:A→B重物既跟随动系一起向右平动,图5-3吊重物的复合运动又在动系上从下往向运动,重物的运动是两个简单运动的合成。



点的复合运动的分类
一、直线运动:又称作线性运动,是指在限定的直线路径上,沿着一定方向和速度移动的运动。
二、角动:也称为旋转运动,是指物体围绕某一点旋转,或以一定角速度斜率运动,以该点为转轴,其轨迹是一个旋线。
三、抛物运动:指物体投掷后,在重力作用下,以匀加速度直线运动,以及水平和竖直方向上有相对应变化而称之为抛物运动。
四、径向运动:也称为近似圆周运动。
指物体在一定的轨道上以其圆心为旋转轴,以相对圆心的位置的改变不断诞生外转力。
五、螺旋运动:也称升降运动,是指一个物体水平沿螺旋线运动,由低点向高点或者高点到低点而移动,以螺旋线形式而呈现上升或下降的运动状态。


§2-5 点的复合运动(1)在动系、定系中观测动点的运动量之间的关 系:位置关系、速度关系加速度关系。
(2)借助动系研究动点的运动规律的方法。
定义动点对于定参考系的 运动,称为绝对运动。
动点对于动参考系的 运动,称为相对运动。
动参考系对于定参考 系的运动,称为牵连运动 x0 z0相对轨 迹 绝对轨迹Pz Ay x y0O绝对运动、相对运动与牵连运动 例1 动点:滑块P;定系:圆板;动系:杆 OA 绝对运动:螺旋线相对运动:沿杆直线 牵连运动:定轴转动 牵连点Pe: 动系上与动点P位置重 合的点(杆上的点) 牵连点的位置随动点的相对运动而改变。
牵连速度:牵连点的绝对速度,记为ve 。
点的复合运动公式动点的绝对速度 v a 等于动点相 对动系的相对速度 v r 与其牵连点 的速度 ve 之和。
该动系上瞬时与 动点的几何位置重合的点称为动点 的牵连点。
相对 轨迹P绝对轨迹z0z Ay x y0v a = ve + v r动点的绝对加速度 aa 等于 动点相对动系的相对加速度 ar 与其牵连点的加速度 ae 以及哥 氏加速度 aC 之和。
O x0a a = ae + a r + ac哥氏加速度 ac = 2ω × vrω动系的绝对角速度例:速度合成定理的一个启发性证明Oxyz 为定系;刚性金属丝为动系,作刚体一般运动;丝上套小环P为动点。
绝对 轨迹 相对 轨迹e e前时刻动系上与动点重合的点的绝对轨迹速度合成定理:动点的绝对速度等于其牵连速度与相对 速度的矢量和: v a = ve + v r∆r = ∆rr + ∆re⎛ ∆r ∆rr ∆re ⎞ = + lim ⎜ ⎟ t →0 ⎝ ∆t ∆t ∆t ⎠绝对 速度v a = ve + v rP的绝 对位移牵连 速度相对 速度∆rr相对 位移e牵连点的 绝对位移ee定义:在t 瞬时,动系上与动点相重合之点(牵连点) 的绝对速度称为牵连速度,记为 v e 。


