4
26.04.2021
精选ppt课件2021
3
课堂讨论
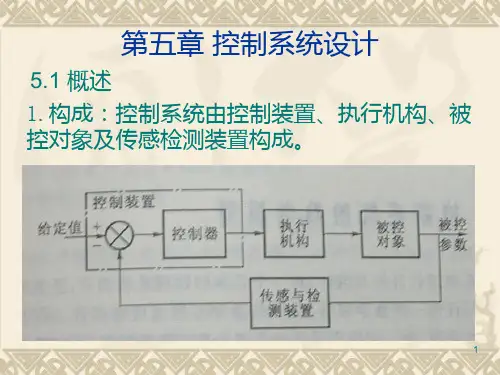
5.按照教材P74图3-5所示,回答: a.图上的信号线哪些是数据总线?哪些是 地址总线?哪些是控制总线? b. 板地址选择是由哪些信号线组成的? c. 输出信号数据由哪些信号线控制? d. 输入数据由哪些信号线控制?
26.04.2021
精选ppt课件2021
26.04.2021
精选ppt课件2021
课堂讨论
2. 机电一体化控制器的基本组成模式有哪两种? 全自动洗衣机和数控机床产品分别适用于哪种 模式?说明理由。 3.为什么说,总线技术是工控机组合模式的技 术基础?总线有哪些形式?请各列举出三种主 要类型。 4.根据传统机床和并联机床在轨迹运动控制上 采用的不同原理,讨论在并联机床数控系统中 采用开放结构的必要性。
第三章 机电一体化系统控制器的构成原理
26.04.2021
精选ppt课件2021
1
课堂讨论
1。以下哪一点不是工控机必须满足的条件:[ ] A. 能够提供各种数据实时采集和控制; B. 能够安装在机械结构里面,和机器成为一 体; C. 能够和被控制对象的传感器、执行机构直 接接口; D. 能够在苛刻的工作环境中可靠运行。