TDCP时间差分载波相位
- 格式:ppt
- 大小:3.48 MB
- 文档页数:29
2023年 9月 Sep 2023Digital Technology &Application 第41卷 第9期Vol.41 No.9数字技术与应用190中图分类号:P228.1文献标识码:A文章编号:1007-9416(2023)09-0190-03DOI:10.19695/12-1369.2023.09.59基于抗干扰阵列天线的北斗RTK 解算与数据分析中国电子科技集团公司第五十四研究所 应俊俊 惠沈盈 陈秀德在多种型号雷达等复杂电磁干扰环境下,由于GNSS 卫星信号功率微弱,极易受到干扰信号影响,在恢复信号后,针对高于10°仰角的卫星,天线相位中心仍有1cm 左右的偏差。
对于高精度测量型接收机而言,阵列天线引入的载波相位误差较大,会导致整周模糊度固定错误,进而引起较大的位置误差,因此,卫星导航抗干扰技术受到高度重视。
其中,阵列天线抗干扰技术在空域进行信号处理,利用不同阵元信号的自适应加权合成,在干扰来波方向形成零陷,具有很好的抗干扰性能,因而受到广泛关注。
但阵列天线抗干扰的同时也对GNSS 载波相位观测值造成一定影响,进而导致RTK 定位成功率和精度迅速下降,如何在抗干扰的同时实现高精度的RTK 定位也成为GNSS 研究的主要方向之一[1-3]。
1 抗干扰阵列天线设计高精度测量对天线相位中心的稳定性要求较高,通用的高精度测量型天线相位中心偏差都在2mm 以内,抗干扰阵列天线由于布阵、互耦、单元天线设计等原因,其相位中心偏差会更大,导致定位误差甚至达到分米级以上,无法应用于高精度场景,因此,如何设计高稳定度的零相位中心天线是关键技术之一。
采用基于FSS(频率选择表面)/UC-EBG(共面紧凑型电子带隙)的零相位阵列天线设计及标校技术可解决上述问题,天线阵设计上采用基于FSS/UC-EBG 设计的零相位阵列天线技术,通过加载FSS 天线罩、两馈点微带叠层天线阵元、天线地板加载UC-EBG 等技术手段实现;同时采用基于二维矩阵的阵列天线相位中心标校技术进行阵列接收天线的相位中心标定,经过校正以后,使得阵列天线的相位中心变化量能够满足高精度测量的应用需求。
第9卷第3期导航定位学报 Vol.9,No. 3 2021年6月Journal of Navigation and Positioning Jun.,2021Vb 引文格式:张嘉骅,陶贤露,朱锋. 安卓智能手机GNSS单点测速性能评估[J]. 导航定位学报, 2021, 9(3): 26-35.(ZHANG Jiahua, TAO Xianlu, ZHU Feng. The performance evaluation of GNSS absolute velocity determination for Android smartphone[J]. Journal of Navigation and Positioning, 2021, 9(3): 26-35.)DOI:10.16547/ki.10-1096.20210305.安卓智能手机GNSS单点测速性能评估张嘉骅,陶贤露,朱锋(武汉大学测绘学院,武汉430079)摘要:针对很少有人使用安卓(Android)智能手机搭载的低成本全球卫星导航系统(GNSS)芯片研究测速的问题,采用多普勒频移、载波相位中心差分和载波相位历元间差分(TDCP)三种GNSS单点测速方法,评估了小米8和华为P10安卓智能手机在不同场景中的测速精度。
结果表明:在静态场景中,小米8手机的多普勒频移测速精度达到厘米每秒级,载波相位中心差分和TDCP法测速精度可达毫米每秒级;P10手机的三种测速法的测速精度达到分米每秒级。
在开阔动态场景中,两部手机多普勒频移在水平方向及垂直方向上的测速精度分别约为1 dm/s、2 dm/s,而两种载波相位测速法的测速精度可达厘米每秒级;在树荫遮挡场景中,两部手机多普勒频移的三维测速精度为4~5 dm/s。
两种载波相位测速法受到观测环境影响而导致精度下降,但仍优于多普勒频移的测速精度。
在高楼遮挡场景中,两部手机多普勒频移的三维测速精度约为7 dm/s,小米8手机TDCP法在垂直方向的测速误差可达1.25 m/s。
时间数字转换器TDC( Time to Digital Convert )---- 高精度短时间间隔测量技术与方法---时间间隔的测量技术,尤其是高精度的时间间隔(皮秒1ps=10E-12s量级) 的测量技术意义重大,不论是电信通讯,芯片设计和数字示波器( Digital Oscilloscope)等工程领域,还是原子物理、天文观测等理论研究,以及激光测距、卫星定位等航天军事技术领域都离不开高精度的时间间隔测量技术。
时间间隔测量分辨率和精度与其应用环境有很大关系。
在日常生活中,精确到分钟的测时精度已能满足人们的普通需要了,但现代军事、通讯、导航等领域对时间精确度的要求越来越高。
1 秒的测时误差会导致大海中的舰船偏离航线数百米,1 微秒的测时误差会导致航天飞机不能安全返航。
精密时间间隔测量是高精度激光脉冲测距、超声波测距和雷达测距的物理基础。
测量波束在测距仪器和被测目标之间往返的时间间隔与距离成正比,测距精度直接由时间间隔测量精度决定。
激光测距、雷达测距和超声波测距在军事、航天、航空、冶金等方面都有着广泛应用。
军事上对打击目标的精确测距是精确打击的基础,提高时间间隔测量的分辨率,就意味着有效提高制导、引爆的精确度;在航空航天领域,飞行器通过精确测量波束往返所需的时间间隔来进行导航和高度标定等,飞行过程对时间间隔测量精度和实时性要求更为苛刻,实时精确地测量时间间隔,可以保障飞行器的安全飞行。
综上所述,精密时间间隔测量技术在航空、航天、精确制导以及核物理等领域有着广泛的应用,是导航、空间技术、通讯、工业生产、电力等应领域不可缺少的关键技术。
精密时间间隔测量对测控技术在工业、国防及学技术的进步方面起到了举足轻重的作用。
各学科的发展前沿,对时间、率电子测量技术的发展提出了越来越高的要求,研究微小时间间隔的测量法,进一步提高时间、频率测量分辨率,是当今科技高速发展所亟待解决课题。
这方面所取得的新技术及成果,将会产生巨大的经济效益。
GPS信号接收机:GPS接收机,能够接受、跟踪、变换、和测量GPS卫星信号的接收设备。
作用:能够捕获按一定卫星高度截止角所选择的待测卫星的信号,并跟踪这些卫星的运行,对所接收的GPS信号进行变换,放大和处理,以测出GPS信号从卫星到接收机的传播时间,解译出GPS卫星所发送的导航电文,实时的计算出测站的三维位置,三维速度和时间,从而视线导航和定位。
组成: GPS接收机天线单元、GPS接收机主机单元和电源三部分。
分类方式:按接收机的用途分类(导航型接收机、测地型接收机、授时型接收机);按接收机的载波频率分类(单频接收机、双频接收机);按接收机通道数分类(多通道接收机、序贯通道接收机、多路多用通道接收机);按接收机工作原理分类(码相关型接收机、平方型接收机、混合型接收机、干涉型接收机)。
SA技术和AS技术的含义GPS的SA技术,有选择可用性技术,即人为地将误差引入卫星钟和卫星数据中,故意降低GPS精度,使C/A码定位精度从20m降到100m。
GPS的AS技术,即反电子欺骗技术。
它将P码与W码相加,形成新的严格保密的Y码。
其目的是防止敌方使用P码进行经学的导航定位。
GPS现代化中军事和民用部分的技术措施增加卫星发射的信号强度,以增强抗电子干扰能力; GPS信号频道上,增加新的军用码(M码),与民用码分开,有更好的抗破译的保密和安全性能;军用接收设备比民用的具有更好的保护装置,特别是抗干扰能力和快速初速化功能;创造新技术,阻止或阻扰地方使用GPS。
美国GPS新政策的根本目标是什么能够提供连续不断的定位,导航和授时服务;满足国家安全,国土安全经济,民用,科研和商业增长的需求;能保持军用星基定位,导航和授时的卓越服务;能够提供优于民用星基定位,导航和授时服务的竞争能力;能保持星基定位,导航和授时服务在国际上的霸主地位;能够提高美国在星基定位,导航和授时应用领域的技术领先定位。
简述GPS在国民经济各领域发展和国防建设中的应用概念。

载波相位差分原理由于自身结构及测量中随机噪声误差的限制测距码差分GPS 仅可满足m 级动态定位需要;载波相位测量噪声误差远低于测距码,在静态相对定位中已实现10-6~10-8的精度,但整周未知数求解需进行长时间的静止观测,数据需事后处理,限制了该方法在动态定位中的应用。
然而快速逼近整周模糊度技术的出现使利用载波相位差分技术实时求解载体位置成为可能。
具有快速高精度定位功能的载波相位差分测量技术,简称RTK (real time Kinematic )技术。
载波相位差分定位技术是在基准站上安置一台GPS 接收机,对卫星进行连续观测,并通过无线电传输设备实时地将观测数据及测站坐标信息传送给用户站;用户站在接收卫星信号的同时通过无线接收设备接收基准站信息,根据相对定位原理实时处理数据并以cm 级精度给出用户站的三维坐标。
载波相位差分定位技术可分为修正法和求差法:前者将载波相位的修正量发送给用户站,对用户站的载波相位进行改正实现定位;后者将基准站的载波相位发送给用户,由用户站将观测值求差进行坐标解算。
星站间的相位差值由三部分组成()()ji j i j i j i t t N t N δϕ+-+=Φ00 (1)式中()0t N j i 为起始整周模糊度,()0t t N j i -为从起始时刻至观测时刻的整周变化值,ji δϕ为观测相位的小数部分。
则星站间距离为载波波长与星站相位差的乘积,即()()()j ij i j i j i t t N t N δϕλρ+-+=00~ (2)若在基准站利用已知坐标和卫星星历可求得星站间的真实距离ji ρ,星站间伪距观测值则可表示为()i i j i j i j i j i j i V M T I t t c ++++-⋅+=δδδδδρρ~ (3)公式中i M δ为多路径效应,i V 为GPS 接收机噪声。
在基准站可求出伪距改正数()i i j i j i j i j i j i j i V M T I t t c ++++-⋅=-=δδδδδρρδρ~ (4)用此改正数对用户站伪距观测值进行修正,有()()()()()i k i k j ij k j i j k i k j k j i j k V V M M T T I I t t c -+-+-+-+-⋅+=-δδδδδδδδρδρρ~ (5)当基准站和用户站之间的距离小于30km ,可认为j i j k I I δδ=,ji j k T T δδ=,则 ()()()()()()δρδδδδρδρρ∆+-+-+-=-+-+-⋅+=-222~kjkjkjik i k i k j k j i j k Z ZY YX XV V M M t t c (6)式中()()()i k i k i k V V M M t t c -+-+-⋅=∆δδδδδρ。
DGPS原理以及GPS系统的特点知识介绍DGPS原理目前GPS系统提供的定位精度是优于10米,而为得到更高的定位精度,我们通常采用差分GPS技术:将一台GPS接收机安置在基准站上进行观测。
根据基准站已知精密坐标,计算出基准站到卫星的距离改正数,并由基准站实时将这一数据发送出去。
用户接收机在进行GPS观测的同时,也接收到基准站发出的改正数,并对其定位结果进行改正,从而提高定位精度。
差分GPS分为两大类:伪距差分和载波相位差分1.伪距差分原理这是应用最广的一种差分。
在基准站上,观测所有卫星,根据基准站已知坐标和各卫星的坐标,求出每颗卫星每一时刻到基准站的真实距离。
再与测得的伪距比较,得出伪距改正数,将其传输至用户接收机,提高定位精度。
这种差分,能得到米级定位精度,如沿海广泛使用的“信标差分”2.载波相位差分原理载波相位差分技术又称RTK(Real Time Kinematic)技术,是实时处理两个测站载波相位观测量的差分方法。
即是将基准站采集的载波相位发给用户接收机,进行求差解算坐标。
载波相位差分可使定位精度达到厘米级。
大量应用于动态需要高精度位置的领域。
GPS系统的特点GPS系统具有全天候、全方位、高精度、多用途以及方便快捷高效等特点。
1)全天候:指野外观测可不受时间的限制。
不论白天黑夜、刮风下雨、夏暖冬寒,均可获得满意的观测效果。
2)全方位:指野外作业不受空间的限制,只要能同时接收到四颗以上卫星的信号,即可进行定位。
不要求测站间互相通视,可在陆地、海上、水上、空中(航测)测量定位。
既可静态观测,也可动态观测。
3)高精度:单频GPS接收机静态测量(后处理)精度可达±5mm+2ppm·D。
双频GPS 接收机静态测量精度可达±5mm+1ppm·D。
实时动态测量(RTK)精度可达±20mm+2ppm·D。
4)多用途:不仅用于测量定位,还可用于导航以及测速和授时。
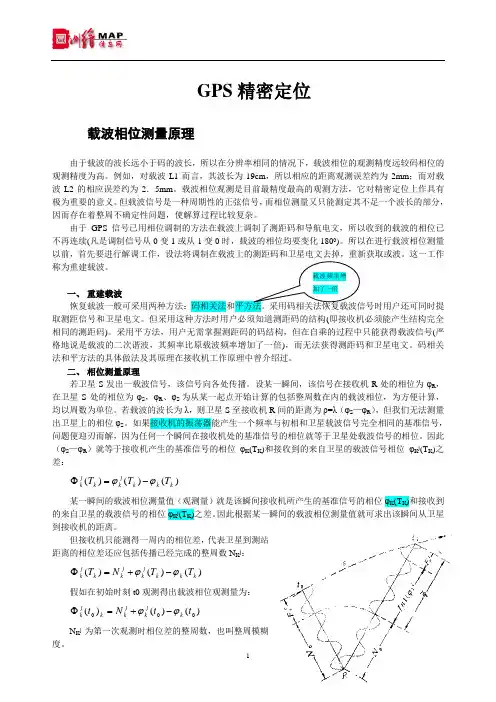
GPS 精密定位载波相位测量原理由于载波的波长远小于码的波长,所以在分辨率相同的情况下,载波相位的观测精度远较码相位的观测精度为高。
例如,对载波L1而言,其波长为19cm ,所以相应的距离观测误差约为2mm ;而对载波L2的相应误差约为2.5mm 。
载波相位观测是目前最精度最高的观测方法,它对精密定位上作具有极为重要的意义。
但载波信号是一种周期性的正弦信号,而相位测量又只能测定其不足一个波长的部分,因而存在着整周不确定性问题,使解算过程比较复杂。
由于GPS 信号已用相位调制的方法在载波上调制了测距码和导航电文,所以收到的载波的相位已不再连续(凡是调制信号从0变1或从1变0时,载波的相位均要变化1800)。
所以在进行载波相位测量以前,首先要进行解调工作,设法将调制在载波上的测距码和卫星电文去掉,重新获取或波。
这一工作称为重建载波。
一、 重建载波恢复载波一般可采用两种方法:码相关法和平方法。
采用码相关法恢复载波信号时用户还可同时提取测距信号和卫星电文。
但采用这种方法时用户必须知道测距码的结构(即接收机必须能产生结构完全相同的测距码)。
采用平方法,用户无需掌握测距码的码结构,但在自乘的过程中只能获得载波信号(严格地说是载波的二次谐波,其频率比原载波频率增加了一倍),而无法获得测距码和卫星电文。
码相关法和平方法的具体做法及其原理在接收机工作原理中曾介绍过。
二、 相位测量原理若卫星S 发出一载波信号,该信号向各处传播。
设某一瞬间,该信号在接收机R 处的相位为φR ,在卫星S 处的相位为φS ,φR 、φS 为从某一起点开始计算的包括整周数在内的载波相位,为方便计算,均以周数为单位。
若载波的波长为λ,则卫星S 至接收机R 间的距离为ρ=λ(φS —φR ),但我们无法测量出卫星上的相位φS 。
如果接收机的振荡器能产生一个频率与初相和卫星载波信号完全相同的基准信号,问题便迎刃而解,因为任何一个瞬间在接收机处的基准信号的相位就等于卫星处载波信号的相位。
载波相位差分技术在车载导航中的应用苏晓刚; 杨亮亮; 彭小强; 袁蹈; 童子良; 王虎【期刊名称】《《现代导航》》【年(卷),期】2019(010)004【总页数】6页(P262-267)【关键词】GPS; 载波相位差分; 车载导航【作者】苏晓刚; 杨亮亮; 彭小强; 袁蹈; 童子良; 王虎【作者单位】安徽理工大学安徽淮南 232001【正文语种】中文【中图分类】TN9670 引言随着世界经济的不断发展,汽车用户的数量也呈井喷式增长,伴随着生产实践的发展,人们对车载导航的定位精度要求也不断的提高。
最近几年,国内外车载导航定位系统的研究如火如荼,使用GPS进行定位的导航系统,已成为中高端汽车的标配。
作为车载导航系统的核心,定位的精度已成为了研究的热点。
目前,大多导航系统采用伪距差分定位技术,定位精度不高。
为了解决定位精度不高的问题,本文将载波相位差分技术运用在导航定位终端设备中,对其定位精度进行分析评定。
实验结果表明,载波相位差分技术运用到车载导航中,可以极大程度上满足用户对高精度的定位需求。
1 卫星导航差分技术原理1.1 差分的工作原理由于导航信号中存在诸多误差,使得GPS导航系统在定位过程中存在较大的误差,不能满足用户对高精度定位的需要。
为了提高导航定位精度,我们通常采用差分定位技术进行导航。
1.2 差分的技术分类以校正的目标参量为依据,将差分方法分为位置差分、伪距差分和载波相位差分这三类。
1.2.1 伪距差分技术基本原理这是使用最广泛的差分技术。
在基准站处,观测卫星,根据基准站的精密坐标和卫星坐标,求出每颗卫星到基准站的真实距离。
再与伪距数据进行比较,获得伪距的改正数,将其传至用户接收机,以达到提高定位精度的目的。
由于篇幅原因,伪距差分的计算模型原理不再赘述,详细可见参考文献1。
图1 差分技术原理示意图1.2.2 载波相位差分技术基本原理及计算模型基准站通过数据链将载波相位测量值实时发送给移动站接收机;后者将载波相位测量值和接收到的载波相位测量值经过差分运算组成差分测量值;求解初始整周模糊度和基线向量,完成高精度的定位。