隧道三维激光扫描系统方案
- 格式:ppt
- 大小:30.80 MB
- 文档页数:67
三维激光扫描技术在既有交通隧道快速检测中的应用引言在交通建设领域,隧道是不可避免的基础设施之一。
交通隧道的安全和可靠性与其设计、施工和维护密切相关。
由于隧道环境的封闭性和特殊性,使得隧道内部的安全检查、维护和修复工作毫无疑问是一项具有挑战性的任务。
因此,利用现代测量技术对交通隧道进行快速检测和监测是十分必要和重要的。
三维激光扫描技术是一种高效且可靠的测量方法,具有快速、精确、高效的特点,被广泛应用于隧道中进行快速检测。
本文主要介绍三维激光扫描技术在既有交通隧道快速检测中的应用、技术原理和实际应用案例。
一、三维激光扫描技术在隧道检测中的应用三维激光扫描技术可以非常精确地捕捉物体的三维点云信息,绘制出物体的三维模型,具有非接触式测量、快速测量、高精度等优点。
在既有的交通隧道检测中,三维激光扫描技术能够快速获取到内部结构的三维信息,包括隧道内部的地形、地貌、结构等信息。
同时,这种技术也可以通过比对不同时间的数据,快速检测出隧道结构的变化情况。
具体来讲,三维激光扫描技术可用于以下方面:1.测绘隧道地形利用三维激光扫描技术,可以快速、准确地测量隧道内部的地形。
在测绘隧道地形时,可以设置扫描参数,以获得不同密度的点云数据。
同时,还可以基于点云数据生成高精度的数字地形模型,为隧道检测和维护提供基础数据。
2.检测应力损伤交通隧道长期使用后,由于地质条件和自然力的影响,会导致结构应力损伤、破坏或变形。
使用三维激光扫描技术,可以快速获得隧道内部结构的三维形态数据,与设计模型进行比对,判断隧道内部是否存在结构应力损伤现象。
如果存在,则可以及早采取措施修复和加固,以保障隧道的使用安全和可靠性。
3.检测水位变化隧道内部的水位变化也是影响隧道使用安全的因素之一。
通过三维激光扫描技术获取的三维数据可用于检测隧道内部水位的变化情况。
通过比对不同时间的三维数据,可以快速发现隧道内部水位是否发生变化,及时地采取措施避免安全事故的发生。
地铁盾构隧道内型面三维激光扫描检测施工工法深圳地铁盾构隧道内型面三维激光扫描检测施工工法一、前言地铁盾构隧道是城市地铁建设中常见的一种隧道类型,其施工质量和安全问题一直是建设过程中必须关注的重点。
为保证施工质量和安全性,一种基于三维激光扫描技术的盾构隧道型面检测方法被引入并得到了广泛应用。
本文将详细介绍该工法的特点、适应范围、工艺原理、施工工艺、劳动组织、机具设备、质量控制、安全措施、经济技术分析以及工程实例。
二、工法特点地铁盾构隧道内型面三维激光扫描检测施工工法具有如下特点:1. 高精度:采用激光扫描技术,可实现对隧道内型面的高精度测量,能够精确掌握隧道的几何形状和尺寸。
2. 高效率:采用自动化扫描仪,可以快速完成对整个隧道的扫描,大大提高了检测效率,缩短了施工周期。
3. 高安全性:无需人工进入隧道内进行测量,能够避免工人接触到危险环境,提高了工作安全性。
4. 高适应性:适用于各种类型的盾构隧道,无论是直线段还是曲线段,都可以应用该工法进行检测。
5. 可远程实时监控:通过与计算机系统的连接,可以对扫描数据进行实时监控和分析,及时发现问题并采取相应措施。
三、适应范围该工法适用于各类地铁盾构隧道的施工,无论是深埋段、浅埋段还是水下段,都可以通过激光扫描技术进行型面测量和检测。
同时,该工法也适用于各类地质情况,能够应对不同地层条件下的施工需求。
四、工艺原理地铁盾构隧道内型面三维激光扫描检测工法主要通过以下工艺原理实现:1. 激光扫描仪:通过激光扫描仪对隧道内的型面进行无接触式扫描,将扫描数据转化为三维模型。
2. 数据处理软件:利用专业的数据处理软件,对扫描数据进行处理和分析,生成需要的型面图和报告。
3. 实时监控系统:将激光扫描仪与计算机系统连接,实现对扫描过程的实时监控和数据分析。
五、施工工艺 1. 前期准备:选择合适的施工设备和工具,将激光扫描仪固定在适当位置,进行基准校准并调试。
2. 扫描数据采集:启动激光扫描仪,进行隧道内的自动化扫描,保持一定的扫描间距和覆盖范围,并记录扫描数据。
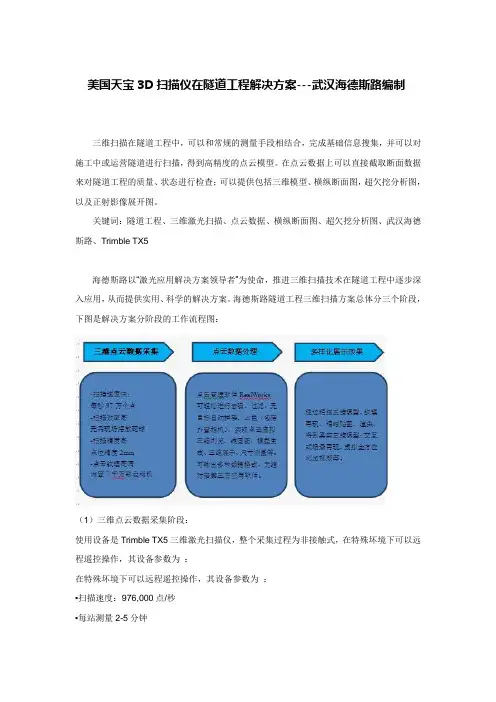
美国天宝3D扫描仪在隧道工程解决方案---武汉海德斯路编制三维扫描在隧道工程中,可以和常规的测量手段相结合,完成基础信息搜集,并可以对施工中或运营隧道进行扫描,得到高精度的点云模型。
在点云数据上可以直接截取断面数据来对隧道工程的质量、状态进行检查;可以提供包括三维模型、横纵断面图,超欠挖分析图,以及正射影像展开图。
关键词:隧道工程、三维激光扫描、点云数据、横纵断面图、超欠挖分析图、武汉海德斯路、Trimble TX5海德斯路以“激光应用解决方案领导者”为使命,推进三维扫描技术在隧道工程中逐步深入应用,从而提供实用、科学的解决方案。
海德斯路隧道工程三维扫描方案总体分三个阶段,下图是解决方案分阶段的工作流程图:(1)三维点云数据采集阶段:使用设备是Trimble TX5三维激光扫描仪,整个采集过程为非接触式,在特殊坏境下可以远程遥控操作,其设备参数为:在特殊坏境下可以远程遥控操作,其设备参数为:▪扫描速度:976,000点/秒▪每站测量2-5分钟▪精度:25米处±2毫米▪分辨率:10米内2毫米▪最大扫描距离:120米▪扫描视角范围:水平360°垂直305°▪内置相机:7000万像素广角环幕▪尺寸:240X200X100mm3▪重量:5公斤(2)点云数据处理阶段采集后的点云数据通过Trimble RealWorks可实现点云过滤、匹配颜色、多站自动拼接、项目管理、测距、三维点云展示、横纵断面图、超欠挖分析、三维空间分析、竣工数据与设计对比、三维建模、高清数码影像、项目飞行浏览、录像等应用,支持海量点云,速度快,可以满足高端客户对高质量三维效果演示的需求。
(3)多样化展示效果输出阶段根据需要,可以提供以下数据成果:原始点云数据、完整点云数据、建筑模型数据、横纵断面图、超欠挖分析图、点云漫游视频、模型漫游视频、虚拟现实浏览、实景漫游浏览、三维GIS应用等。
包括目标记录、彩色多格式网格、正射影像及结合点云的AutoCad文档输出。
如何使用激光扫描仪进行隧道内部测量与分析隧道是现代城市交通建设中不可或缺的一部分,它们在提供便捷交通的同时,也面临着一系列的安全和维护问题。
如何高效地进行隧道内部测量与分析,对于确保隧道的正常运行和安全性至关重要。
而使用激光扫描仪则是一种可行且高效的解决方案。
激光扫描仪是一种先进的测量技术工具,通过激光束扫描的方式,可以快速、准确地获取隧道内部的三维数据。
其工作原理是通过发射一束激光束,然后根据激光束的反射情况来确定不同物体的位置和形状。
这种技术可以覆盖大范围的测量区域,并且不需要直接接触物体,可以保持测量过程的安全性和便捷性。
首先,激光扫描仪可以用于隧道内部的测量。
在进行隧道建设或维护时,了解隧道内部的实际情况是非常重要的。
激光扫描仪可以快速获取隧道内部的几何数据,包括隧道的尺寸、形状、曲率等。
通过对这些数据的分析和比对,可以精确地把握隧道的结构特点,为隧道的设计和施工提供有力的支持。
其次,激光扫描仪可以用于隧道内部的变形监测。
隧道在使用过程中,由于承受了外力或其他因素的影响,很可能会发生变形。
传统的变形监测方法往往需要人工进行,费时费力,并且存在一定的风险。
而激光扫描仪可以快速、连续地获取隧道内部的几何数据,借助于先进的数据处理算法,可以对隧道的变形情况进行实时监测和分析。
一旦发现异常情况,可以及时采取措施进行修复,从而确保隧道的安全运行。
此外,激光扫描仪还可以用于隧道内部的缺陷检测。
隧道的正常运行离不开结构的完整性,任何细微的缺陷都可能对隧道的安全性造成严重威胁。
激光扫描仪可以对隧道内部进行全面而精确的扫描,识别出隧道中存在的任何缺陷,如裂纹、变形等。
借助于高精度的数据分析和处理技术,可以对这些缺陷的严重程度进行评估,并提出相应的维护计划。
总结起来,使用激光扫描仪进行隧道内部测量与分析,可以提高工作效率,确保工作质量,保障隧道的安全运行。
随着激光扫描仪技术的不断发展和应用,相信它在隧道工程中的作用会越来越重要。
图1 地铁隧道断面结构检测技术流程图 1)预处理。
对采集的原始点云数据进行预处理,包括数据拼接、坐标校正、重采样等处理。
预处理通常在三维激光扫描仪配套的处理软件中完成。
2)数据入库。
根据线路中线数据计算预处理完成点云数据各点的里程值,并将其导入服务器的数据库中存储,建立点云数据的里程索引结构。
3)断面几何参数提取。
客户机从服务器中提取断面点云数据,进行自动化去噪、椭圆拟合、几何参数提取等处理,最后输出成果。
2 地铁隧道断面结构检测实施方案2.1 海量隧道点云的高效存储组织管理地铁隧道断面通常按里程划分,进行隧道断面结构检测首先要从隧道点云中提取对应里程上的点云数据。
地铁隧道点云数据通常以文本格式存储,例如.las、.xyz格式,这种文本存储方式的访问速度慢、查询效率低。
为了从海量点云中快速查询指定位置的点数据,通常建立3维KD Tree[13]或者八叉树Octree[14]等索引结构,然而这些索引是以三维的(x,y,z)点进行检索,不适合以里程为索引的线状交通应用,并且索引计算耗时多、存储空间大。
线性参考系统(LinearReferencingSystem,LRS),是一种利用沿着可测量的线要素的相对方位来存储地理位置的方法,例如地铁线路按距离起点的里程定位。
本文基于LRS,根据线路中线计算点云中每个点的里程值M,同时将点的(x,y,z)坐标存储到数据库中,并针对里程值M字段建立索引结构。
通过数据库存储管理,再加之有索引结构,因而数据的访问速度快、查询效率高,同时也能进行多用户高效并发读写,适合多客户机进行并行计算。
受到点云密度的影响,隧道断面的点云通常需要截取一定的厚度,以保证有足够数量的点用于后续处理。
对于数据库中的海量点云数据,可以简单快速地查询到断面对应里程上的点云数据。
例如,查询里程值为M′处、厚度为δ的点云数据只需通过以下SQL语句:select[x],[y],[z]from[TableName]where[M]>=M′-δ/2and[M]<=M′+δ/2(1) 相比以文本格式存储的点云数据,通过SQL语句查询的数据库存储方式无需计算点到断面平面的距离进行逐点筛选,实现快捷方便,断面点云获取效率高。
三维激光扫描检测隧道净空施工工法三维激光扫描检测隧道净空施工工法一、前言隧道净空施工是隧道工程中的重要环节之一,为确保隧道的稳定性和安全性,需要对施工过程进行精准监测和控制。
传统的隧道净空施工工法通常依赖于人工测量和观察,存在效率低下、准确性不高等问题。
而三维激光扫描检测隧道净空施工工法通过引入激光扫描技术,可以实现对施工过程的精确监测和实时控制,为隧道工程提供了更高效、更准确的解决方案。
二、工法特点三维激光扫描检测隧道净空施工工法具有以下几个特点:1. 高效精确:采用激光扫描仪对隧道净空进行全方位、高密度的扫描,可以快速获取隧道表面的三维点云数据,并提供高精度的模型重建和量化分析。
2. 实时监测:激光扫描仪可实现实时数据采集和传输,利用云计算和物联网技术,可以将数据传输到远程监测中心,实时监控隧道净空施工过程。
3. 可视化展示:通过对三维点云数据的处理和渲染,可以生成真实感的隧道模型,并对其进行可视化展示,便于施工人员和管理人员直观地了解隧道净空的实际情况。
4. 高度自动化:由于采用了激光扫描技术,减少了人工测量和观察的工作量,提高了工作效率,减少了工人的劳动强度。
三、适应范围三维激光扫描检测隧道净空施工工法适用于各类隧道净空施工,包括公路隧道、铁路隧道、地铁隧道等。
无论是施工新隧道还是进行老隧道的检修和加固,都可以采用该工法进行准确监测。
四、工艺原理三维激光扫描检测隧道净空施工工法通过将激光扫描仪安装在隧道内的固定位置上,利用其发射的激光束在隧道内进行扫描,获取隧道表面的点云数据。
然后,通过对点云数据的处理和分析,生成隧道的三维模型,并进行空间分析和量化分析。
施工人员可以通过对模型的可视化展示,直观地了解隧道净空的实际情况,并根据实时监测的数据对施工过程进行精确控制。
五、施工工艺1、准备工作:确定激光扫描仪的安装位置,安装固定支架,并校准仪器。
对需要施工的隧道进行表面清理和处理,确保扫描的质量和准确性。
龙泉山隧道三维激光扫描测试一、工程概况龙泉山隧道位于成都东~简阳南区间,属于新建成都至重庆铁路客运专线工程CYSG-1标段,其隧道进口位于成都市龙泉驿区,出口位于简阳市。
工程全长7328m,为双线单洞铁路隧道,进口里程DK22+485,出口里程DK29+813。
全隧位于直线上,设有平导一座和斜井三座。
龙泉山山脉系四川盆地西部成都平原和川中丘陵的地理界线,是岷江与沱江的分水岭,在四川盆地内部,山脉形成一条高高的、狭长的隆起,其西面是成都平原,东面是川中丘陵。
龙泉山呈一条形山脉,高程480~985m,由北东~南西纵贯境内,为本区最高地形,丘陵和平原分别依附于两侧,地形起伏较大,相对高差50~150m,自然坡度30°~50°,坡面植被发育。
测试召集单位:铁道科学研究院西南院测试实施单位:龙泉山隧道第三方监测项目部北京数联空间科技股份有限公司二、测试项目和使用仪器1、测试项目1)隧道超欠挖检测分析2)喷锚层平整度检测分析3)TMS Tunnelscan系统断面收敛内符合精度测试2、观测仪器表1 TMS配置清单设备名称数量单位说明FARO Focus3D1 套扫描仪全站仪 1 台APM定位测量,最好是徕卡全站仪,带激光对中,要带数据下载工具全站仪三脚架 2 只用于架设全站仪和扫描仪全站仪后视棱镜 2 套含基座、支架、棱镜后视棱镜三脚架 2 只视隧道现场如果导线点有强制对中装置可以不带APM定位基座 1 只含内六角扳手、小十字螺丝刀、2个棱镜连接杆三角基座 1 只连接APM基座,最好带激光对中定位靶球 1 套APM定位半球棱镜靶球轻便三脚架 1 只可以使用轻质三脚架、三角基座和棱镜支架替代APM定位棱镜 2 只可以用徕卡圆棱镜(带单框)替代隧道设计数据 1 项平曲线、竖曲线、横坡、设计断面三、工作概述我单位于2012年7月12日对龙泉山隧道进行了测量,测量段为进口DK22+585~DK22+615,围岩等级为V级,该段初期支护已稳定,二次衬砌未施作。
三维激光扫描隧道断面施工工法三维激光扫描隧道断面施工工法一、前言隧道工程一直是工程建设中的重要组成部分,为了提高隧道工程的设计和施工效率,三维激光扫描技术被应用到了隧道断面的施工工法中。
本文将介绍三维激光扫描隧道断面施工工法的特点、适应范围、工艺原理、施工工艺、劳动组织、机具设备、质量控制、安全措施、经济技术分析以及工程实例。
二、工法特点三维激光扫描隧道断面施工工法具有以下特点:1. 高精度:激光扫描仪可以实时获取隧道断面的三维数据,精度可达毫米级,避免了传统测量方法的误差。
2. 高效率:激光扫描仪能够快速捕获隧道断面的数据,并且数据处理软件能够自动提取出关键参数,减少了施工过程中的人工操作时间。
3. 实时监测:在施工过程中,激光扫描仪可以实时监测隧道断面的变化,及时发现偏差并进行调整。
4. 可视化:通过对三维数据进行处理和分析,可以生成可视化的模型,直观地展示隧道断面的形态和变化。
三、适应范围三维激光扫描隧道断面施工工法适用于各种类型的隧道工程,包括公路隧道、铁路隧道、地铁隧道等。
无论是新建隧道还是隧道的维修和改造,都可以采用这种工法进行施工。
四、工艺原理三维激光扫描隧道断面施工工法基于以下原理:1. 三维激光扫描:激光扫描仪通过发射激光束并接收反射的激光信号,可以测量出隧道断面的三维坐标数据。
2. 数据处理:激光扫描仪采集到的数据通过专业的软件进行处理和分析,可以自动提取出断面的参数,并生成可视化的模型。
五、施工工艺三维激光扫描隧道断面施工工法包括以下施工阶段:1. 准备阶段:安装激光扫描仪和连接数据处理系统,准备施工现场。
2. 扫描阶段:启动激光扫描仪进行断面数据的采集,包括扫描整个断面的内部和外部。
3. 数据处理阶段:通过数据处理软件对采集到的数据进行处理和分析,提取出断面的关键参数,生成可视化的模型。
4. 施工调整阶段:根据生成的模型,对施工过程中出现的偏差进行调整,确保隧道断面的准确度和稳定性。
三维激光扫描在隧道检测中的应用在现代交通基础设施建设中,隧道扮演着至关重要的角色。
为了确保隧道的安全运行和长期稳定性,高效、准确的检测方法必不可少。
近年来,三维激光扫描技术凭借其独特的优势,在隧道检测领域得到了广泛的应用,并取得了显著的成果。
一、三维激光扫描技术的工作原理三维激光扫描技术是一种非接触式的测量技术,它通过向被测物体发射激光束,并接收反射回来的激光信号,来获取物体表面的三维坐标信息。
在隧道检测中,扫描仪通常被安装在移动平台上,如轨道车或汽车,沿着隧道的轴线进行移动扫描。
扫描仪在移动过程中不断发射激光束,对隧道的内壁、拱顶和底板等部位进行快速、密集的测量,从而生成高精度的三维点云数据。
二、三维激光扫描技术在隧道检测中的优势1、高精度和高分辨率三维激光扫描技术能够获取毫米级甚至亚毫米级的测量精度,对于检测隧道表面的细微变形和缺陷具有重要意义。
同时,它还能够提供高分辨率的点云数据,使我们能够清晰地观察到隧道结构的细节。
2、快速和高效相比传统的检测方法,如人工测量和摄影测量,三维激光扫描技术能够在短时间内获取大量的测量数据,大大提高了检测效率。
这对于长隧道和交通繁忙的隧道尤为重要,可以减少检测对交通的影响。
3、全面和无遗漏传统的检测方法往往只能对隧道的部分区域进行测量,容易出现遗漏。
而三维激光扫描技术能够对整个隧道进行全方位的扫描,确保检测的全面性和完整性。
4、非接触式测量由于是非接触式测量,三维激光扫描技术不会对隧道结构造成损伤,同时也避免了测量人员在危险环境中的作业风险。
三、三维激光扫描在隧道检测中的具体应用1、隧道结构变形监测隧道在使用过程中,由于地质条件、车辆荷载等因素的影响,可能会发生结构变形。
通过定期对隧道进行三维激光扫描,并将不同时期的点云数据进行对比分析,可以准确地监测隧道结构的变形情况,及时发现潜在的安全隐患。
2、隧道表面病害检测隧道内壁可能会出现裂缝、剥落、渗漏水等病害。