第12章 离散控制系统的经典法设计
- 格式:ppt
- 大小:1.37 MB
- 文档页数:5

离散控制系统的设计:探讨离散控制系统的设计原则、方法和实践介绍离散控制系统是一种用于实现自动化控制的系统,它使用离散事件和离散时间来描述和控制系统的行为。
设计一个好的离散控制系统对于确保系统的稳定性和性能至关重要。
本文将探讨离散控制系统的设计原则、方法和实践,以帮助读者了解如何设计一个高效可靠的离散控制系统。
离散控制系统的设计原则原则1:明确系统需求在设计离散控制系统之前,首先要明确系统的需求。
这包括定义系统的输入、输出以及期望的性能要求。
通过明确系统需求,可以为系统的设计和实现提供清晰的目标和指导。
原则2:选择适当的控制策略选择适当的控制策略是离散控制系统设计的关键。
根据系统的性质和需求,可以选择不同的控制策略,如比例控制、积分控制、微分控制等。
在选择控制策略时,需要考虑系统的稳定性、响应速度和鲁棒性等方面。
原则3:进行系统建模和仿真在进行离散控制系统设计之前,通常需要对系统进行建模和仿真。
系统建模可以帮助设计者深入理解系统的行为和特性,从而更好地进行系统设计和参数调整。
通过仿真可以在实际系统之前验证控制算法的性能和稳定性。
原则4:考虑系统的鲁棒性离散控制系统往往面临各种不确定性和干扰。
为了确保系统的稳定性和鲁棒性,设计者需要考虑系统的鲁棒性。
这包括选择合适的控制策略、调整控制器的参数以及设计鲁棒性控制器等。
原则5:进行系统的优化和参数调整在进行离散控制系统设计之后,通常需要对系统进行优化和参数调整。
通过优化可以进一步改善系统的性能和稳定性。
参数调整可以帮助设计者找到最佳的参数组合,以满足系统的性能要求。
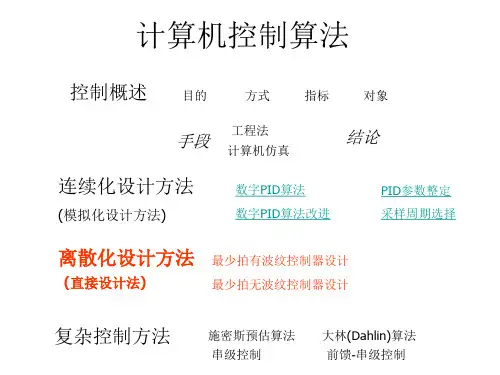
离散控制系统的设计方法方法1:PID控制器设计PID控制是离散控制系统设计中常用的方法之一。
PID控制器由比例、积分和微分三个部分组成,可以根据系统的反馈信号调整系统的输出。
PID控制器设计的关键是选择合适的控制参数,可以通过试错法、Ziegler-Nichols方法等进行参数调整。
方法2:状态空间法设计状态空间法是离散控制系统设计中的另一种常用方法。
离散控制系统中的PID控制器设计PID控制器是一种常用的控制器,广泛应用于离散控制系统中。
它是由比例项(P项)、积分项(I项)和微分项(D项)三个部分组成的,通过对系统的反馈信号进行处理,以使得系统响应更加稳定和准确。
在离散控制系统中,PID控制器的设计十分关键。
合理地设置PID 参数是实现良好控制效果的关键。
下面将基于离散控制系统中的PID 控制器设计,详细讨论PID参数的选择方法与调整策略。
一、PID参数的选择方法PID控制器的性能取决于其参数的选择,而PID参数的选择可以采用以下几种常用的方法:1. 经验法:根据经验公式或者实际应用中的调试经验,直接选取PID参数。
由于经验法灵活性较大,但不够科学,容易导致控制效果不理想。
2. Ziegler-Nichols方法:该方法基于系统的频域特性进行参数的调整,步骤较为简单。
首先,将控制器的I、D项参数设为0,只保留P 项;然后逐步增加P项增益,直至系统产生持续性振荡;最后按照振荡周期调整P、I、D项参数。
3. 优化算法:如遗传算法、粒子群算法等,通过优化算法求解PID 参数的最优取值。
该方法需要有系统的数学模型作为基础,且需要足够多的计算资源支持。
以上是几种常用的PID参数选择方法,不同的方法适用于不同的情况。
在具体选择过程中,需要从实际需求和系统特点出发,综合考虑,选择适合的方法。
二、PID参数的调整策略PID参数的调整是为了使得控制系统更加稳定和准确,常用的调整策略包括参数整定法和自整定法两种:1. 参数整定法:该方法是根据系统的动态性能指标,通过试探和修正的方式进行PID参数的调整。
常用的动态性能指标包括超调量、调整时间、稳态误差等。
根据实验结果,逐步修正PID参数,直至满足系统的性能要求。
2. 自整定法:自整定法是指采用自适应控制算法,通过系统自身的响应来动态调整PID参数。
常用的自整定算法有基于模型的自整定方法、经验模型自调整控制(EMC)方法等。

8. 离散控制系统的设计流程是怎样的?离散控制系统的设计可不像做一顿简单的饭菜,它需要一系列严谨又巧妙的步骤。
咱们先来说说第一步,那就是明确设计要求。
这就好比你决定出门旅行,得先搞清楚自己想去哪儿、想怎么玩。
比如说,你是想要系统响应速度快得像火箭,还是想要系统稳定得像泰山?是对精度要求极高,还是对成本控制很严格?举个例子哈,就像有一家工厂要设计一个控制机器人搬运货物的离散控制系统。
他们的要求就是机器人搬运货物的速度得快,而且不能出错,否则货物摔坏了损失可就大了。
接下来第二步,就是建立数学模型啦。
这就像是给系统画一幅“肖像画”,把它的特点和行为都用数学公式表现出来。
这个过程可不简单,得考虑各种因素,像系统的延迟、噪声干扰等等。
比如说,还是那个工厂的例子,要考虑机器人的机械结构、电机的性能、传感器的精度等等,把这些都转化成数学语言。
然后是第三步,选择控制算法。
这就像是给系统选一件合适的“衣服”,得合身又好看。
常见的控制算法有 PID 控制、模糊控制、最优控制等等。
还是拿工厂举例,经过分析,如果对系统的精度要求很高,可能就会选择 PID 控制算法。
第四步是进行仿真分析。
这就像是在虚拟世界里先让系统“跑一跑”,看看效果怎么样。
可以通过计算机软件来模拟系统的运行,看看是不是达到了设计要求。
比如说,在仿真中发现机器人搬运货物的速度不够快,那就得回去调整控制算法的参数。
再往后,第五步就是硬件实现啦。
这就像是把虚拟的梦想变成现实的存在。
要选择合适的控制器、传感器、执行器等等。
比如说,为了让机器人能准确感知货物的位置,就得选高精度的传感器。
第六步,系统调试。
这就像是给新做好的衣服修修改改,让它更合身。
在实际运行中,不断调整参数,优化系统性能。
比如说,可能会发现机器人在某些特殊情况下会出现卡顿,那就得赶紧查找原因,进行调试。
最后一步,系统评估。
这就像是给系统来一场“考试”,看看它到底合不合格。
离散控制系统的设计流程虽然听起来复杂,但每一步都至关重要。