距离矢量路由算法模拟
- 格式:docx
- 大小:2.31 MB
- 文档页数:9
网络工程师基础知识(选择题)模拟试卷29(题后含答案及解析) 题型有:1.1.在路由器中,可用以下______命令查看路由器的路由表。
A.arp-aB.tracerouteC.route printD.display ip routing-table正确答案:D解析:arp-a:查看所有MAC地址与IP地址间的地址解析列表。
traceroute:Linux命令,在MS Windows中为tracert。
通过该命令可以知道信息从你的计算机到互联网另一端的主机走的是什么路径。
route print:显示主机路由表的内容。
路由表分为五列:第一列是网络目的地址,列出了路由器连接的所有网段;网络掩码列提供这个网段本身的子网掩码,而不是连接到这个网段的网卡的子网掩码;第三列是网关,网关表告诉路由器这个数据包应该转发到哪一个IP地址才能到达目的网络;接口列告诉路由器哪一个网卡连接到了合适的目的网络,从技术上说,接口列仅告诉路由器分配给网卡的IP地址;最后一列是测量。
display ip routing-table:用来查看路由表的摘要信息。
该命令以摘要的形式显示路由表信息,每一行代表一条路由内容,包括目的地址/掩码长度、协议优先级度量值、下一跳输出接口,使用该命令仅能查看到当前被使用的路由,即最佳路由。
2.关于距离矢量的算法,以下说法错误的是______。
A.距离矢量算法不会产生路由环路问题B.距离矢量算法是靠传递路由信息来实现的C.路由信息的矢量表示法是(目标网络,metric)D.使用距离矢量算法的协议只从自己的邻居获得信息正确答案:A解析:距离矢量路由算法是一种路由算法,该法在一个路由中重申跳数来寻找一个最短路径生成树。
距离矢量路由算法号召每个路由器在每次更新时发送它的整个路由表,但是仅仅发给它的邻居。
距离矢量路由算法倾向于路由循环,但是比链路状态路由算法更简单。
距离矢量路由协议中路由环路问题的解决方法如下:.定义最大值;.水平分割技术;.路由中毒;.反向路由中毒;.控制更新时间;.触发更新。
计算机网络中的路由算法路由算法在计算机网络中起着关键的作用,它用于确定数据包在网络中的传输路径。
根据不同的网络拓扑和需求,有多种不同的路由算法被应用。
本文将介绍几种常见的路由算法。
1. 距离矢量算法(Distance Vector Algorithm)距离矢量算法是一种分布式的路由算法,每个节点在路由表中记录到达目的节点的距离向量。
节点之间通过交换距离向量信息来更新路由表,并且通过Bellman-Ford算法来计算最短路径。
该算法简单易实现,但是在大型网络中容易产生计数到无穷大的问题,即由于链路故障等原因产生的无限循环。
2. 链路状态算法(Link State Algorithm)链路状态算法是一种集中式的路由算法,每个节点都会收集与自身相连的链路状态信息,并通过最短路径算法(如Dijkstra算法)计算出到达其他节点的最短路径。
然后,每个节点都将自己的链路状态信息广播给所有其他节点,使得每个节点都有完整的网络拓扑和链路状态信息。
该算法需要节点之间频繁的广播和计算,但是能够保证收敛,即要么找到最短路径,要么不进行路由。
3. 路径向量算法(Path Vector Algorithm)路径向量算法可以看作是距离矢量算法和链路状态算法的结合,它通过回退进行路径检测和避免计数到无穷大的问题。
每个节点在路由表中记录到达目的节点的路径和向量信息,通过交换路径向量信息来更新路由表。
在计算最短路径时,路径向量算法使用类似链路状态算法的Dijkstra算法,但是在寻找路径时,会检查前面的节点是否已经在路径中出现,以避免产生环路。
4. 队列距离矢量算法(Queue Distance Vector Algorithm)队列距离矢量算法是距离矢量算法的一种改进算法,主要解决计数到无穷大问题。
该算法引入了队列和计数器,通过计数器和链路状态信息来确定数据包是否进入队列。
每个节点在路由表中记录到达目的节点的距离向量和队列的长度。
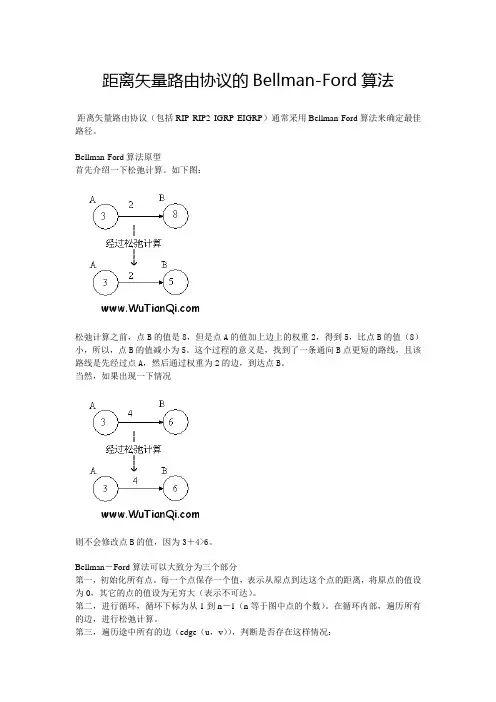
距离矢量路由协议的Bellman-Ford算法距离矢量路由协议(包括RIP RIP2 IGRP EIGRP)通常采用Bellman-Ford算法来确定最佳路径。
Bellman-Ford算法原型首先介绍一下松弛计算。
如下图:松弛计算之前,点B的值是8,但是点A的值加上边上的权重2,得到5,比点B的值(8)小,所以,点B的值减小为5。
这个过程的意义是,找到了一条通向B点更短的路线,且该路线是先经过点A,然后通过权重为2的边,到达点B。
当然,如果出现一下情况则不会修改点B的值,因为3+4>6。
Bellman-Ford算法可以大致分为三个部分第一,初始化所有点。
每一个点保存一个值,表示从原点到达这个点的距离,将原点的值设为0,其它的点的值设为无穷大(表示不可达)。
第二,进行循环,循环下标为从1到n-1(n等于图中点的个数)。
在循环内部,遍历所有的边,进行松弛计算。
第三,遍历途中所有的边(edge(u,v)),判断是否存在这样情况:d(v)> d (u) + w(u,v)则返回false,表示途中存在从源点可达的权为负的回路。
之所以需要第三部分的原因,是因为,如果存在从源点可达的权为负的回路。
则应为无法收敛而导致不能求出最短路径。
考虑如下的图:经过第一次遍历后,点B的值变为5,点C的值变为8,这时,注意权重为-10的边,这条边的存在,导致点A的值变为-2。
(8+-10=-2)第二次遍历后,点B的值变为3,点C变为6,点A变为-4。
正是因为有一条负边在回路中,导致每次遍历后,各个点的值不断变小。
在回过来看一下bellman-ford算法的第三部分,遍历所有边,检查是否存在d(v) > d (u) + w(u,v)。
因为第二部分循环的次数是定长的,所以如果存在无法收敛的情况,则肯定能够在第三部分中检查出来。
比如此时,点A的值为-2,点B的值为5,边AB的权重为5,5 > -2 + 5. 检查出来这条边没有收敛。
计算机网络原理距离矢量路由距离矢量路由选择(Distance Vector Routing)算法是通过每个路由器维护一张表(即一个矢量)来实现的,该表中列出了到达每一个目标地的可知的最短路径及所经过的线路,这些信息通过相邻路由器间交换信息来更新完成。
我们称这张表为路由表,表中按进入子网的节点索引,每个表项包含两个部分,到达目的地最优路径所使用的出线及一个估计的距离或时间,所使用的度量可能是站段数,时间延迟,沿着路径的排队报数或其他。
距离矢量路由选择算法有时候也称为分布式Bellman-Ford路由选择算法和Ford-Fulkerson算法,它们都是根据其开发者的名字来命名的(Bellman,1957;Ford and Fulkerson,1962)。
它最初用于ARPANET路由选择算法,还用于Internet和早期版本的DECnet 和Novell的IPX中,其名字为RIP。
AppleTalk t Cisco路由器使用了改进型的距离矢量协议。
在距离矢量路由选择算法中,每个路由器维护了一张子网中每一个以其他路由器为索引的路由选择表,并且每个路由器对应一个表项。
该表项包含两部分:为了到达该目标路由器而首选使用的输出线路,以及到达该目标路由器的时间估计值或者距离估计值。
所使用的度量可能是站点数,或者是以毫秒计算的延迟,或者是沿着该路径排队的分组数目,或者其他类似的值。
假设路由器知道它到每个相邻路由器的“距离”。
如果所用的度量为站点,那么该距离就为一个站点。
如果所用的度量为队列长度,那么路由器只需检查每一个队列即可。
如果度量值为延迟,则路由器可以直接发送一个特殊的“响应”(ECHO)分组来测出延时,接收者只对它加上时间标记后就尽快送回。
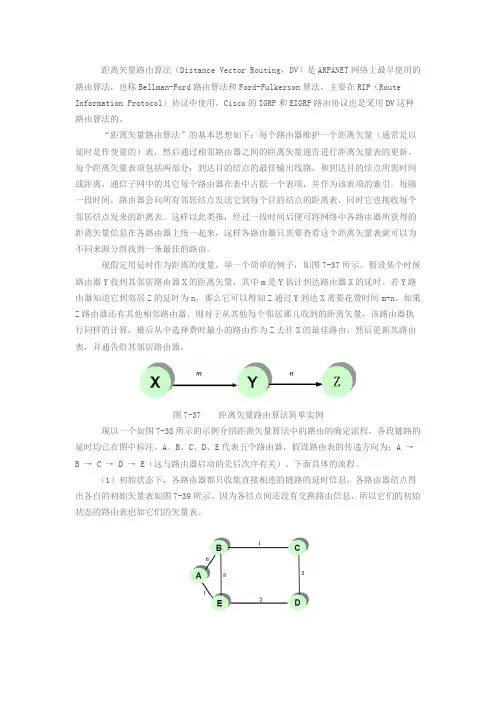
距离矢量路由算法(Distance Vector Routing,DV)是ARPANET网络上最早使用的路由算法,也称Bellman-Ford路由算法和Ford-Fulkerson算法,主要在RIP(Route Information Protocol)协议中使用。
Cisco的IGRP和EIGRP路由协议也是采用DV这种路由算法的。
“距离矢量路由算法”的基本思想如下:每个路由器维护一个距离矢量(通常是以延时是作变量的)表,然后通过相邻路由器之间的距离矢量通告进行距离矢量表的更新。
每个距离矢量表项包括两部分:到达目的结点的最佳输出线路,和到达目的结点所需时间或距离,通信子网中的其它每个路由器在表中占据一个表项,并作为该表项的索引。
每隔一段时间,路由器会向所有邻居结点发送它到每个目的结点的距离表,同时它也接收每个邻居结点发来的距离表。
这样以此类推,经过一段时间后便可将网络中各路由器所获得的距离矢量信息在各路由器上统一起来,这样各路由器只需要查看这个距离矢量表就可以为不同来源分组找到一条最佳的路由。
现假定用延时作为距离的度量,举一个简单的例子,如图7-37所示。
假设某个时候路由器Y收到其邻居路由器X的距离矢量,其中m是Y估计到达路由器X的延时。
若Y路由器知道它到邻居Z的延时为n,那么它可以得知Z通过Y到达X需要花费时间m+n。
如果Z路由器还有其他相邻路由器,则对于从其他每个邻居那儿收到的距离矢量,该路由器执行同样的计算,最后从中选择费时最小的路由作为Z去往X的最佳路由,然后更新其路由表,并通告给其邻居路由器。
图7-37 距离矢量路由算法简单实例现以一个如图7-38所示的示例介绍距离矢量算法中的路由的确定流程,各段链路的延时均已在图中标注。
A、B、C、D、E代表五个路由器,假设路由表的传递方向为:A → B →C → D → E(这与路由器启动的先后次序有关)。
下面具体的流程。
(1)初始状态下,各路由器都只收集直接相连的链路的延时信息,各路由器结点得出各自的初始矢量表如图7-39所示。
物联网中的动态路由算法近年来,随着物联网技术的飞速发展,越来越多的智能设备进入我们的生活中。
这些设备之间需要进行通信,而要实现这样的通信,就需要迅速、高效地找到一条合适的通信路径。
在物联网中,动态路由算法被广泛应用,它可以实现网络的自适应、优化和可靠性。
本文将介绍物联网中常用的动态路由算法及其优缺点。
一、物联网中的路由算法在物联网中,路由算法的主要任务是找到一条最佳的路径,让信息尽快地传输到目的地。
传统的路由算法有基于离散事件的模拟技术(DES)、最短路径算法(SPF)和最小成本路由算法等。
但这些传统算法并不适用于物联网。
物联网通常涉及大量的设备和节点,这个网络是分布式的、动态的,并且节点具有不可预测的移动性。
因此,物联网中的路由算法必须是动态的、自适应的、具有负载均衡和容错能力的。
为此,物联网中采用了一些适用于动态环境下的路由算法,常用的有以下几种。
二、基于距离矢量的路由算法基于距离矢量的路由算法(Distance Vector Routing Protocol,DVRP)是一种基于链路状态的路由算法,其主要思想是每个节点维护到其他节点的距离信息,通过比较每个节点距离其它节点的距离,寻找到一条最短路径。
这种算法的优势在于其简单易实现、抗噪声和抗故障能力强。
但它的缺点也很明显,如容易出现环路、收敛速度慢等。
但在小型的物联网中,这种算法仍然是一个不错的选择。
三、基于链路状态的路由算法在物联网中,基于链路状态的路由算法(Link State Routing Protocol,LSRP)也被广泛应用。
该算法要求每个节点通过广播自己的链路状态信息,以构建整个网络图,然后计算每个节点到达其他节点的最短路径。
这种算法的优点在于其收敛速度快、计算准确性高,但缺点也很明显,如通信效率低下、节点存储和计算负载大等。
四、基于蚁群算法的路由算法基于蚁群算法的路由算法是指模拟蚂蚁寻找食物的行为来寻找网络中最短的路径,它具有自组织、分布式、容错、自适应等特点,可以有效地处理动态和复杂的网络环境。
路由器转发算法带例题路由器转发算法是指在计算机网络中,路由器根据接收到的数据包的目的地址,决定将数据包转发到哪个出口端口的算法。
它是网络中的关键技术之一,能够实现网络中数据的快速、准确传输。
常见的路由器转发算法有以下几种:1. 静态路由算法:静态路由算法是指管理员手动配置路由器的路由表,将目的地址与出口端口的对应关系预先设定好。
当路由器接收到数据包时,根据目的地址查找路由表,找到对应的出口端口进行转发。
例如,假设路由器的路由表如下:目的地址出口端口192.168.1.0 1192.168.2.0 2当路由器接收到一个目的地址为192.168.1.100的数据包时,根据路由表可以得知该数据包需要通过出口端口1进行转发。
2. 动态路由算法:动态路由算法是指路由器通过与相邻路由器交换路由信息,自动学习网络拓扑和最优路径,并更新自己的路由表。
常见的动态路由算法有距离矢量路由算法(Distance Vector Routing)和链路状态路由算法(Link State Routing)。
距离矢量路由算法中,路由器通过周期性地交换路由表信息,计算到达目的地址的最短路径。
每个路由器根据相邻路由器发送过来的路由表信息,更新自己的路由表。
链路状态路由算法中,路由器通过交换链路状态信息,计算网络中的最短路径树。
每个路由器根据收集到的链路状态信息,计算出到达目的地址的最短路径,并更新自己的路由表。
3. 自适应路由算法:自适应路由算法是指路由器根据网络拥塞情况和链路质量动态调整路由选择。
常见的自适应路由算法有最小带宽算法、最短延迟算法和最小负载算法等。
最小带宽算法中,路由器根据链路的带宽情况选择最大带宽的路径进行转发。
最短延迟算法中,路由器根据链路的延迟情况选择最短延迟的路径进行转发。
最小负载算法中,路由器根据链路的负载情况选择负载最小的路径进行转发。
总结起来,路由器转发算法根据不同的需求和网络情况,选择合适的算法来实现数据包的转发。
距离矢量路由算法距离矢量路由算法是一种常用的路由协议算法,用于在一张网络拓扑图中计算一个节点到其它节点的最短路径,从而实现数据包的转发和路由选择。
本文将详细介绍距离矢量路由算法的原理、实现和优化方法。
一、距离矢量路由算法原理距离矢量路由算法是一种分布式算法,它的核心思想是每个节点通过交换路由信息来建立一个网络的路由表,并根据这张表来进行数据包的转发。
在距离矢量路由算法中,每个节点都会维护一个距离向量,它表示从当前节点到其它节点的距离。
距离向量包含三部分信息:到达某个节点的距离、中转节点和前缀信息。
其中,到达某个节点的距离可以采用最小跳数、带权重的跳数或延迟时间等方式来衡量。
在距离矢量路由算法中,每个节点都会周期性地向邻居节点广播自己的距离向量,并接收邻居节点的距离向量。
通过比较邻居节点的距离向量和自己的距离向量来更新自己的路由表。
如果邻居节点的距离更小,则更新路由表;如果邻居节点的距离更大,则不做任何操作。
这样,所有的节点都会逐步收敛到一个稳定状态,每个节点的路由表也会被更新成最优路由。
二、距离矢量路由算法实现距离矢量路由算法的实现通常可以分为两个阶段:初始化和更新。
在初始化阶段,每个节点都会初始化自己的距离向量和路由表,并向邻居节点发送距离向量。
在更新阶段,每个节点会周期性地接收邻居节点的距离向量,比较并更新自己的路由表,然后向邻居节点发送自己的距离向量。
具体实现的过程如下:1. 初始化阶段:(1)每个节点都向其它节点广播自己的距离向量,并保存邻居节点的距离向量。
(2)每个节点都根据邻居节点的距离向量更新自己的路由表,并确定最短路径。
2. 更新阶段:(1)每个节点周期性地向邻居节点发送自己的距离向量。
(2)每个节点周期性地接收邻居节点的距离向量,并比较以更新自己的路由表。
(3)如果某个节点的距离向量发生了变化,则它会向其它节点广播自己的距离向量。
三、距离矢量路由算法优化距离矢量路由算法是一种简单有效的路由协议算法,但也存在一些问题。
基于距离矢量算法的路由器模拟实验一试验目的深入理解分布式路由选择算法理解、掌握和利用距离向量算法所实现的路由器模拟Internet上的IP路由器,它能确定网络的最短路由,并在其上传输分组二算法描述距离向量算法也称为Bellman-Ford shortest path algorithm 它是一种动态路由选择算法每个路由器都定期与其相邻的所有路由器交换路由表,据此更新它们自己的路由表路由表更新规则:1所有结点都监听从其它结点传来的路由表,并在下列情况下更新其路由表1发现了一条到达某目的的新路由,而该路由在原来的路由表中不存在(即发现了一条新路由),则在路由表中增加该路由2发现了一条到达某目的的、距离更短的新路由,则用该路由替换原有的路由3到达某目的的一条路由,其后继结点到达该目的地的距离发生了变化,则需要更新该路由的距离三实验要求编写一个程序利用距离向量算法更新路由表该程序的多个实例(进程或线程)可以以运行在一台机器一个实例代表一个路由器(结点)实例之间利用UDP交换路由假设结点与其邻居结点的都为距离为1。
路由表采用如下结构:目的结点(dest_addr) 路由(route)5 3,4,5… …在路由表中,我们登记路由而不是下一跳,以方便处理。
转发分组时,只考虑第一个下一个结点为了指明实例及其邻居,程序启动时必须能接收以下参数:其中: router ID, myport, port1, port2, port3…–ID:实例的编号,数字0,9–myport:该实例使用的UDP端口,以便发送和接收分组–port1, port2, port 3, …:该实例的邻居所使用的UDP端口程序必须能处理以下命令:1)N,打印活动的邻居列表。
–用空格分开代表各个邻居的数字(在一行) –所谓活动邻居是指直接可达的结点(距离为1) –如果没有邻居,则输出空行–例如:4 72)T,输出路由表。
输出到每个目的结点的路由–每条路由一行––例如:4 37 63)0,1,… 9,发送分组–每个数字代表一个数据分组发送请求–数据分组发送到数字代表的目的地–如果目的结点不是邻居结点,不能直接发送分组,而必须在路由的各个结点上沿路由转发该分组4)0,1,… 9,向目的结点发送分组–收到数据分组的结点必须输出一行,显示该分组的目的–例如:发送分组:5转发分组:显示 F5–如果结点无法转发分组,则丢弃该分组,显示:D目的例如: 显示 D5 –数据分组没有数据,只需要目的地址和TTL TTL:Time to Live分组应该在TTL规定的时间或步数内到达目的结点,否则丢弃之分组经过每个中间结点时,将其TTL减1。
距离矢量路由算法
距离矢量路由算法是一种计算网络中最佳路径的算法。
这种算法通过在网络上的每个节点中保存到其他节点的距离向量来工作。
每个节点根据它们之间的距离向量,计算到每个其他节点的最短路径。
这个过程不断重复,直到每个节点都拥有网络中所有其他节点的最短路径信息。
距离矢量路由算法可以用于计算全网最短路径,也可以用于计算子网内的最短路径。
它是一种分布式算法,因为每个节点都只能看到它的邻居节点的距离向量,而不知道网络的整体拓扑结构。
这种算法虽然简单,但它的计算复杂度较高,因为每个节点都需要计算到其他节点的最短路径。
在距离矢量路由算法中,节点会周期性地向邻居发送它们的距离向量,以便邻居节点可以更新它们的路由表。
如果一个节点发现它的距离向量发生了变化,它会向它的邻居发送一个更新消息。
这个过程也会不断重复,直到每个节点的路由表都被更新到最优状态。
距离矢量路由算法在实际应用中有一些限制。
由于每个节点都只能看到它的邻居节点的距离向量,因此它可能会选择一个不是全局最短路径的路径。
此外,如果一个节点的路由表发生了错误,它可能会向其他节点发送错误的路由信息,导致整个网络的不稳定性。
为了解决这些问题,其他类型的路由算法,如链路状态路由算法和路径矢量路由算法,也被广泛使用。
距离矢量路由算法距离矢量路由算法(Distance Vector Routing Algorithm)是一种常用的路由算法,用于确定分组在网络中的最佳路径。
这种算法根据每个路由器收到的更新消息计算出到达其他路由器的最佳路径,并相应地更新自己的路由表。
以下是关于距离矢量路由算法的详细介绍。
1.算法原理2.距离和跳数3. Bellman-Ford算法距离矢量路由算法的基础是Bellman-Ford算法。
该算法通过迭代的方式计算出每个路由器到达其他路由器的最短路径。
算法的核心思想是每个路由器通过交换距离矢量消息来更新自己的路由表,直到没有进一步的更新为止。
4.路由表更新每个路由器周期性地向邻居路由器发送距离矢量消息,该消息包含自己的路由表信息。
邻居路由器收到消息后,将其与自己的路由表进行比较,更新自己的路由表。
如果发现更短的路径,邻居路由器将更新自己的路由表,并将该更新消息发送给其他邻居。
这样,所有路由器最终会达到一致的路由表。
5.路由循环问题- 毒性逆转(Poison Reverse):当路由器发现条路径不可达时,会将该路径的距离设置为无穷大(或者一个特定值),然后将这个信息广播给邻居路由器。
这样,其他路由器就不会继续使用该路径。
- 分割涣散(Split Horizon):路由器向邻居路由器发送更新消息时,会忽略到达该邻居路由器的路径。
这样可以避免将更新消息发送回原始发送者,从而防止路由循环的发生。
6.收敛性和稳定性距离矢量路由算法的目标是实现路由表的收敛,即所有路由器都拥有一致的路由表。
然而,由于距离矢量路由算法是分布式的,并且每个路由器只知道邻居的信息,所以可能存在路由振荡和慢收敛的问题。
为了提高算法的稳定性,可以采用触发更新和定时更新的机制,以及引入拓扑改变的计数器。
-触发更新:当路由器检测到它的路由表发生了变化时,会立即发送更新消息给邻居路由器,以便快速传播变化。
-定时更新:路由器周期性地发送更新消息,即使没有路由表的变化。
实验二路由选择算法模拟实验一、实验目的1.理解路由选择算法实现原理,加深对网络层功能的理解;2.掌握距离向量路由选择算法中路由表形成过程及其对路由选择的影响;二、实验内容1.熟悉模拟软件的运行环境及操作方法;2.调整参数,分析路由表变化情况,理解路由算法。
三、实验原理1.距离向量路由选择算法基本原理如下:(1)初始化,对于每节点G,对所有它直接连接的目的地N,路由表中的项用三元组(N,G,0)表示,即从节点G到目的节点N无需经过转发。
(2)节点G定期发送它的路由表给相邻节点,更新信息中对应着每一个目的地N,用一个三元组来表示(N,V,D),即到目的地N的路由上的下一节点为V,G到N的距离为D。
(3)节点G收到G’送来的路由信息,对于更新信息中给出的每个目的地,在G的路由表中查找相对应的表项,设它为(N,V,D),而更新信息中的三元组为(N,V’,D’),C为节点G和G’之间的距离。
如果找不到相应的表项,则在G的路由表中增加一项(N,G’,D’+C);(4)如果V=G’,则G中路由表对应的表项更新为(N,G’,D’+C);否则,比较D’+C和D:如果D’+C<D,则G中表项更新为(N,G’,D’+C)否则G中表项保持原状,仍为(N,V,D)。
2.网络拓扑结构图3.信息格式:目的IP地址`目的端口号`源IP地址`源端口号`控制`数据控制:"M"-数据帧;"GetR"-请求邻居路由器回送距离表,无数据域;"R"-数据内容为距离表。
四、实验仪器计算机45台、集线器4台、网卡45块、网线条、软盘若干。
五、实验步骤1.将模拟软件拷贝到计算机硬盘,熟悉模拟软件的运行环境及界面,察看帮助文件。
2.运行配置好的模拟环境,分析路由表情况,并与算法相比较,得出结论。
3.调整距离值,重新计算路由表,分析路由表情况,得出结论。
六、实验数据与分析1、普通路径分析(1)首轮计算路由表1分析:路由2到其本身的距离为0,到路由1、3、4的距离分别为4、2、6,由于与除路由1、3、4外的其他路由都未直接连接,所以延时显示为>100的数值。
距离矢量路由算法题目Distance-vector routing algorithm is a type of routing algorithm used in computer networks to determine the best path for data packets to traverse from one node to another. It operates by calculating the distance or cost to reach all possible destinations and updating this information periodically. The most common distance-vector routing algorithm is the Routing Information Protocol (RIP), which uses hop counts to determine the shortest path.距离矢量路由算法是计算机网络中用于确定数据包从一个节点到另一个节点的最佳路径的一种路由算法。
它通过计算到达所有可能目的地所需的距离或成本,并定期更新这些信息来运行。
最常见的距离矢量路由算法是路由信息协议(RIP),它使用跳数来确定最短路径。
One of the drawbacks of distance-vector routing algorithms is the slow convergence time. When a network change occurs, such as a link going down or a new link being added, it takes time for the routing tables to update and converge on the new optimal paths. This delay can result in suboptimal routing decisions and increased latency in data transmission.距离矢量路由算法的一个缺点是收敛时间较慢。
实验二十距离矢量算法计算过程分析【实验目的】1. 通过分析距离矢量算法的计算过程,理解距离矢量路由协议的工作原理。
【实验学时】2学时【实验环境】在本实验中需要4台路由、1台交换机、1台RG-PATS网络协议分析仪。
四台路由器运行RIP路由协议,使用协议分析仪采集数据包,对采集到的数据进行分析。
将所有的路由器都接入到交换机上,并在交换机上配置端口映像功能,具体IP分配如下表:表6-2 设备IP地址分配表设备接口IP地址连接到交换机192.168.1.1/24FA0/8 RSR-A FA0/0RSR-A LO0 192.168.10.1/24 --FA0/6 RSR-A FA0/1192.168.3.1/24RSR-B FA0/0 192.168.1.2/24 FA0/9RSR-B FA0/1FA0/10192.168.2.1/24-- RSR-B LO0192.168.20.1/24RSR-C FA0/0 192.168.2.2/24 FA0/7192.168.30.1/24-- RSR-C LO0RSR-D FA0/0 192.168.3.2/24 FA0/6192.168.400.1/24-- RSR-D LO0RG-PATS网络协议分析Eth 0 172.16.1.4 FA0/24仪设备连接如下图所示:249图6-43 实验拓扑图【实验内容】1、使用协议分析仪采集网络中的RIP选路数据包,分析距离矢量算法的计算过程。
【实验流程】图 6-44 实验流程图【实验原理】距离矢量算法是以R.EBellman、L.R.Ford和D.R.Fulkerson所做的工作为基础的,由于这个原因,所以有时距离矢量算法又称为Bellman-Ford或Ford-Fulkerson算法。
250在所有的动态路由协议中,最简单的就是距离矢量路由协议(D-V)。
它使用的是最简单的距离矢量(Distance-Vector,简称D-V)路由算法。
计算机数据通信与网络模拟一一、单项选择题(本大题共20小题,每小题1分,共20分)1.为了提高公共数据网的数据吞吐率和传输速度,公共数据网最新采用的交换协议是A.X.25B.帧中继C.ATMD.FDDI2.PSK和ASK技术的结合可以提高数据传输速率,这种调制方式称为A.相位幅度调制PAMB.相位频率调制PFMC.频率幅度调制FAMD.频率相位调制FPM3.网络层的协议数据单元称作A.帧B.位C.分组D.报文4.TCP协议的全称是A.互连网协议B.传输控制协议C.数据报协议D.超文本协议5.TCP/IP协议簇中属于互连层协议的是A.TCPB.RARPC.DNSD.FTP6.串行通信线路的数据链路层协议中可以支持动态IP地址的是A.SLIPB.UDPC.PPPD.TCP7.IEEE802.3的CSMA/CD常用的退避算法是A.非坚持B.1-坚持C.P-坚持D.可预测P-坚持8.对于10Mbps的基带CSMA/CD网,在发生冲突时所产生的碎片帧的长度应小于A.64字节B.128字节C.256字节D.512字节9.在一栋楼的同一楼层内,要求用千兆以太网技术将一台服务器连接到楼层的接人交换机,二者之间的距离是78米,应采用的千兆以太网物理层协议是A.1000Base-SXB.1000Base-LXC.1000Base-CXD.1000Base-T10.在以下交换方式中传输延时最小,但线路利用率最低的是A.电路交换B.分组交换C.报文交换D.字符交换l1.对于大型企业,在用户设备和ISDN交换设备之间需要安装的设备是A.网络终端NTlB.网络终端NT2C.网络终端NTl+NT2D.调制解调器12.X.25网的交换节点所参与的OSI层次是A.1-4层B.1-3层C.1-2层D.1层13.ATM网的交换节点所参与的OSI层次是A.1-4层B.1-3层C.1-2层D.1层14.以下对ATM网络特征的描述错误..的是A.ATM仍然采用分组交换技术B.ATM网络节点只参与物理层功能C.ATM是面向连接的交换D.ATM不支持多媒体传输应用15.ATM网络所采用的复用方式为A.同步时分复用B.异步时分复用C.频分多路复用D.空分复用16.某住户通过小区以太网连接因特网,这种接入方式称为A.拨号IP方式B.仿真终端方式C.局域网连接方式D.无线接入方式17.因特网中无连接的用户数据报协议UDP对应于OSI的A.网络层B.传输层C.会话层D.应用层18.一个大网通过子网掩码分成若干子网,子网之间的连接设备可以是A.网关B.路由器C.转发器D.集线器19.一个网络标识为202.13.12的C类IP地址,掩码为255.255.255.224,与主机202.13.12.129在同一子网的是A.202.13.12.12B.202.13.12.34C.202.13.12.125D.202.13.12.15820.万维网WWW(World Wide Web)是Internet上的A.一个主页B.一个Web服务器C.一个网页D.全球信息资源网络非选择题部分二、填空题(本大题共20小题,每空1分,共20分)21.通过因特网向公众提供信息内容服务的公司或部门英文简称为______。
距离向量路由算法距离向量路由算法是一种网络路由算法,它通过在网络中的各个节点之间交换距离向量信息来确定最佳的路由路径。
在距离向量路由算法中,每个节点都会维护一张距离表,其中包含到达其他节点的最短距离。
每个节点通过不断地交换距离向量信息来更新自己的距离表,并根据最短距离选择下一跳节点,从而实现数据的有效传输。
距离向量路由算法的核心思想是每个节点只知道直接连接的邻居节点的距离,而不知道整个网络的拓扑结构。
节点通过交换距离信息来逐步建立网络的全局视图,并根据这个全局视图来选择路由路径。
以下是距离向量路由算法的基本步骤:1.初始化:每个节点将自己与邻居节点的直接连接距离添加到距离表中。
2.更新距离表:每个节点周期性地向邻居节点发送自己的距离表,并接收邻居节点的距离表。
通过比较收到的距离表和当前的距离表,节点可以更新自己的距离表。
3.计算最短路径:根据距离表中的最小距离以及邻居节点的信息,计算到达每个目标节点的最佳下一跳节点。
4.更新路由信息:如果节点的距离表发生了变化,它将通知相邻节点,并将新的距离表发送给它们。
这样,整个网络中的所有节点将逐步更新自己的距离表和路由信息。
1.算法简单:距离向量路由算法的实现较为简单,计算量较小,适用于中小型网络。
2.分布式计算:每个节点只需要知道它的邻居节点的距离信息,不需要了解整个网络的拓扑结构,因此算法具有较好的可扩展性。
3.容错性:由于每个节点只知道邻居节点的信息,因此算法对网络中的部分节点故障具有一定的容错能力。
然而,距离向量路由算法也存在一些缺点,包括:1.收敛速度慢:由于节点只知道邻居节点的信息,并且信息需要通过多个节点传播,因此算法的收敛速度较慢,可能存在路由环路和震荡的问题。
2.算法复杂度高:在大规模网络中,距离向量路由算法需要不断地交换距离向量信息,导致算法的复杂度较高,可能会对网络性能产生负面影响。
3.不适用于复杂网络:距离向量路由算法对于具有复杂拓扑结构的网络,如有多个入口和出口的网络,可能无法获得最佳的路由路径。
打开WF,刷新路由表,设置程序中的网络结构和距离矢量的值,路由表更新,打开DL,点击启动对路由表刷新,改变网路拓扑刷新路由表验证网路路由功能,修改线路延迟,刷新路由表,由路由1转发给路由3,路程为从1到2到4到3。
2、多机模拟实验:
手动刷新路由表直到表不在变化
左上角的路由器向远程2发送:from 6667:
右上角的路由器向远程3发送数据from 6668:
修改线路参数并更新路由表:
左上角的路由器再次向远程2发送:from 6667:
修改线路参数并更新路由表:
右上角的路由器再次向远程3发送数据from 6668:
2、数据处理1)计算示例
3、实验心得。