《电机矢量控制技术》矢量控制综述资料
- 格式:doc
- 大小:82.01 KB
- 文档页数:8
永磁同步电机的矢量控制系统一、本文概述随着科技的不断进步和工业的快速发展,电机作为核心动力设备,在各种机械设备和工业自动化系统中扮演着至关重要的角色。
其中,永磁同步电机(Permanent Magnet Synchronous Motor,简称PMSM)因其高效率、高功率密度和优良的控制性能等优点,被广泛应用于电动汽车、风力发电、机床设备等领域。
为了实现永磁同步电机的精确控制,提高其运行效率和稳定性,矢量控制(Vector Control)技术被引入到永磁同步电机的控制系统中。
本文将对永磁同步电机的矢量控制系统进行深入探讨。
文章将简要介绍永磁同步电机的基本结构和运行原理,为后续的矢量控制理论奠定基础。
接着,文章将重点阐述矢量控制的基本原理和实现方法,包括坐标变换、空间矢量脉宽调制(SVPWM)等关键技术。
文章还将分析矢量控制系统中的传感器选择、参数辨识以及控制策略优化等问题,以提高系统的控制精度和鲁棒性。
通过本文的研究,读者可以对永磁同步电机的矢量控制系统有一个全面而深入的了解,为实际应用中提高永磁同步电机的控制性能提供理论支持和指导。
本文还将探讨未来永磁同步电机矢量控制系统的发展趋势和挑战,为相关领域的研究者和工程师提供有价值的参考信息。
二、永磁同步电机的基本原理永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)是一种高效、高性能的电机类型,其工作原理基于电磁感应和磁场相互作用。
PMSM的核心组成部分包括定子、转子和永磁体。
定子通常由三相绕组构成,负责产生旋转磁场;转子则装有永磁体,这些永磁体在定子产生的旋转磁场作用下,产生转矩从而驱动电机旋转。
PMSM的工作原理可以简要概括为:当定子三相绕组通入三相交流电时,会在定子内部形成旋转磁场。
由于转子上的永磁体具有固定的磁极,它们在旋转磁场的作用下会受到力矩的作用,从而使转子跟随定子磁场的旋转而旋转。
通过控制定子电流的相位和幅值,可以精确控制旋转磁场的转速和转向,从而实现对PMSM的精确控制。
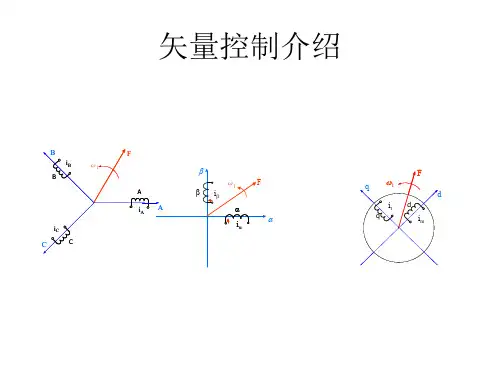
电机的矢量控制原理
矢量控制是一种现代电机控制技术,用于实现电机的精确控制。
它基于空间矢量的概念,通过控制电机的电流和电压来实现对电机转矩和速度的控制。
矢量控制的核心思想是将电机模型抽象为两个相互垂直的矢量:转矩矢量和磁场矢量。
转矩矢量代表电机的输出力矩,而磁场矢量代表电机产生的磁场。
通过合理控制这两个矢量的大小和方向,可以实现对电机的精确控制。
矢量控制主要包括两个阶段:电流控制和转矩控制。
在电流控制阶段,通过控制电机的电流大小和相位,可以实现对电机磁场矢量大小和方向的控制。
通常采用的电流控制方法有直接转矩控制和感应电动机矢量控制等。
转矩控制阶段则是通过控制电机转矩矢量的大小和方向来实现对电机的转矩和速度控制。
通常采用的转矩控制方法有转矩指令控制和速度闭环控制等。
其中,速度闭环控制通过测量电机转速并与设定值进行比较,控制转矩大小和方向,从而实现对电机的速度控制。
总的来说,矢量控制通过合理控制电机的电流和电压,实现对电机转矩和速度的精确控制。
它具有响应速度快、控制精度高、动态性能好等优点,广泛应用于电机驱动和工业自动化领域。
永磁同步电机矢量控制发展综述
永磁同步电机矢量控制是一种高效、精确、可靠的控制方法,已经成为电机控制领域的研究热点。
该控制方法通过对电机的电流、电压、转速进行矢量分析,实现对电机的精确控制。
近年来,随着电机工业的快速发展,永磁同步电机矢量控制技术也在不断完善和发展。
永磁同步电机矢量控制技术的发展可以分为以下几个阶段:传统的电机控制技术、传统的矢量控制技术、基于反馈线性化的矢量控制技术、基于自适应控制的矢量控制技术以及基于模型预测控制的矢量控制技术。
在传统的电机控制技术中,电机通常采用电阻-电感-电容(RLC)模型进行控制,这种控制方法简单,但对电机的响应速度和精度较差,无法满足高性能电机控制的要求。
传统的矢量控制技术则是通过矢量变换对电机进行控制,提高了电机控制的精度和响应速度,但存在磁饱和等问题。
基于反馈线性化的矢量控制技术是在传统的矢量控制技术基础上,通过对电机的非线性特性进行建模和控制,提高了电机控制的精度和可靠性。
基于自适应控制的矢量控制技术则是根据电机的实际运行情况,自适应地调整控制参数,提高了电机控制的鲁棒性和适应性。
基于模型预测控制的矢量控制技术则是通过建立电机的预测模型,预测电机未来的运行状态,从而实现更加精确的电机控制。
总之,永磁同步电机矢量控制技术在电机工业中具有广泛的应用前景,其发展也将会越来越快速和深入。
矢量控制电机
矢量控制电机(Vector Control Motor)是一种能够通过电子方式精确控制电机运转的技术。
其基本原理是将三相交流电信号分解成两个独立的矢量信号,一个是旋转矢量,另一个是定子矢量。
通过控制这两个矢量信号的大小和方向,可以达到控制电机转速、扭矩和位置的目的。
矢量控制电机相比于传统的电机控制方法,有以下优点:
1. 精确控制:能够精确控制电机的转速、扭矩和位置,可广泛应用于高精度的机械设备中。
2. 节能降噪:在电机运转过程中,通过调节电流和电压的大小和相位,可以降低电机的功率损耗和噪音。
3. 适应性强:能够适应不同负载情况下的电机控制,同时也能够适应各种特殊的工作环境。
4. 可靠性高:能够减少电机的机械磨损和损坏,提高电机的使用寿命和可靠性。
总之,矢量控制电机是一种高效、节能、精确和可靠的电机控制技术。
永磁同步电机矢量控制分析一、本文概述永磁同步电机(PMSM)作为一种高性能的电机类型,在现代工业、交通以及新能源等领域的应用日益广泛。
其矢量控制技术,即通过对电机电流的精确控制,实现对电机转矩和磁场的独立调节,从而实现电机的高效、稳定运行。
本文旨在全面分析永磁同步电机的矢量控制技术,包括其基本原理、控制策略、实现方法以及在实际应用中的优缺点,为相关领域的研究者和工程师提供有益的参考。
本文将对永磁同步电机的基本结构和工作原理进行简要介绍,为后续的分析奠定理论基础。
然后,将重点讨论矢量控制技术的理论基础和实现方法,包括空间矢量脉宽调制(SVPWM)技术、电流环和速度环的设计与控制策略等。
在此基础上,本文将深入分析矢量控制技术在永磁同步电机中的应用,包括其在提高电机效率、优化动态性能以及提升系统稳定性等方面的作用。
本文还将对矢量控制技术在永磁同步电机应用中的挑战和前景进行探讨。
一方面,将分析当前矢量控制技术在实际应用中面临的主要问题,如参数敏感性、控制复杂度以及成本等;另一方面,将展望未来的发展趋势,如智能化、集成化以及优化算法的应用等。
本文将对永磁同步电机矢量控制技术的未来发展提出展望,以期为该领域的进一步研究和应用提供参考。
二、永磁同步电机基本原理永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)是一种高效、高功率密度的电机,广泛应用于电动汽车、风力发电、工业自动化等领域。
其基本原理主要基于电磁感应和磁场相互作用。
PMSM的核心部件是永磁体,这些永磁体通常嵌入在电机的转子中,形成固定的磁场。
当电机通电时,定子中的电流会产生一个旋转磁场。
这个旋转磁场与转子中的永磁体磁场相互作用,使得转子开始旋转。
通过精确控制定子中的电流,可以实现对转子旋转速度、方向和扭矩的精确控制。
在PMSM中,矢量控制是一种重要的控制策略。
矢量控制通过独立控制电机的磁通和扭矩分量,实现了对电机的高效、高性能控制。
foc 电机矢量控制FOC电机矢量控制是一种高级的电机控制技术,它通过对电机的电流和电压进行精确控制,实现对电机的高效运行。
本文将对FOC电机矢量控制的原理、优势和应用进行介绍。
一、FOC电机矢量控制的原理FOC电机矢量控制的核心思想是将电机拆分成磁场定向控制和电流控制两个子系统。
首先,通过磁场定向控制,将电机的磁场与转子磁场的磁轴对齐,使电机旋转产生转矩。
然后,通过电流控制,控制电机的电流大小和相位,实现对电机的转速和转矩的精确控制。
具体来说,FOC电机矢量控制使用了两个坐标系:静态坐标系和旋转坐标系。
静态坐标系是以电机的定子为基准,旋转坐标系是以转子为基准。
在磁场定向控制中,通过变换静态坐标系到旋转坐标系,可以将电机的磁场与转子磁场的磁轴对齐。
在电流控制中,通过变换旋转坐标系到静态坐标系,可以将电机的电流转换为静态坐标系下的电流,从而实现对电流的精确控制。
二、FOC电机矢量控制的优势FOC电机矢量控制相比传统的电机控制技术具有如下优势:1. 高效运行:FOC电机矢量控制可以减少电机的功率损耗,提高电机的效率。
通过精确控制电机的电流和电压,可以使电机在不同负载下都能以最佳效率运行。
2. 高精度控制:FOC电机矢量控制可以实现对电机转速和转矩的精确控制。
通过精确控制电机的电流大小和相位,可以实现对电机的精确控制,从而满足不同应用场景的需求。
3. 高动态响应:FOC电机矢量控制可以实现对电机的快速响应。
通过精确控制电机的电流和电压,可以实现电机的快速加速和减速,提高电机的动态响应性能。
4. 低噪音和低振动:FOC电机矢量控制可以减少电机的噪音和振动。
通过精确控制电机的电流和电压,可以减少电机的震荡和共振现象,从而降低电机的噪音和振动。
三、FOC电机矢量控制的应用FOC电机矢量控制广泛应用于各种领域的电机控制中,包括工业控制、家用电器、交通运输等。
在工业控制领域,FOC电机矢量控制可以用于驱动各种类型的电机,如交流电机、直流电机和步进电机。
永磁同步电动机矢量控制永磁同步电动机是一种新型的高性能电机,具有高效率、高功率密度、高转矩密度等特点,在工业和交通领域有广泛应用。
矢量控制是一种高级的控制方法,可以实现电机的高精度运行和性能优化。
本文将介绍永磁同步电动机矢量控制的结构和方法。
永磁同步电动机的结构包括永磁转子、定子绕组和控制器等几个部分。
永磁转子由永磁体和转子绕组组成,永磁体产生一个恒定的磁场,而转子绕组用于传导电流。
定子绕组是通过变频器提供的三相电流激励,产生旋转磁场。
控制器则根据电机的位置、速度和负载要求等信息,调节电机的电流和控制策略,实现对电机的控制。
永磁同步电动机的矢量控制方法主要包括电流控制、转子磁链观测、速度和位置估算等几个步骤。
电流控制是通过控制器提供的电流指令,调节电机的电流大小和相位,使电机的磁场与转子磁场同步,实现最大力矩输出。
转子磁链观测则通过计算电机的电流与磁场之间的关系,实时估算转子的磁链大小和位置,用于后续的控制。
速度和位置估算则是通过测量电机的转子位置和速度,采用信号处理和滤波算法,推算出电机的实际运行状态,用于控制器的反馈。
在矢量控制中,还可以应用一些高级控制技术,如预测控制、自适应控制和模型预测控制等,以进一步提高电机的性能和动态响应。
预测控制通过模型预测电机的状态和负载要求,优化控制策略,实现最佳性能。
自适应控制则是通过实时调节控制器的参数,使控制器能够适应电机的变化,提高控制性能。
模型预测控制则是通过建立电机的动态数学模型,预测未来一段时间的状态和输出,以实现最佳的控制性能。
综上所述,永磁同步电动机矢量控制是一种高级的电机控制方法,能够实现对电机的高精度控制和性能优化。
通过控制电机的电流和磁场,在不同的工况下实现最大力矩输出和高效能运行。
未来,随着控制算法和硬件技术的不断发展,永磁同步电动机矢量控制在各个领域将有更广泛的应用。
三相电机矢量控制-概述说明以及解释1.引言1.1 概述概述部分:三相电机矢量控制是一种先进的电机控制技术,通过对电机的电流和转子位置进行精确控制,使电机在不同工况下能够实现高效、精准的运行。
矢量控制技术可以有效地提高电机的运行效率和响应速度,同时也能够降低电机的能耗和维护成本。
本文将介绍三相电机矢量控制技术的概念和原理,并着重探讨其在工业控制和自动化领域的重要性和应用前景。
同时也将对该技术的优势进行详细阐述,以及展望未来三相电机矢量控制技术的发展方向。
1.2 文章结构:本文将首先介绍三相电机矢量控制的概念和原理,包括其在电机控制领域中的重要性和应用。
然后,我们将深入探讨矢量控制相对于传统控制方法的优势和特点,以及在不同应用领域中的具体应用情况。
最后,我们将总结矢量控制的重要性,并展望未来在该领域的发展方向,以及对读者提出一些思考和启发。
通过这样的结构安排,读者将能够全面了解三相电机矢量控制的相关知识,并对其在未来的发展趋势有着清晰的认识。
目的部分的内容应该涵盖本篇文章的写作目的。
一般来说,写作目的包括介绍读者可能已经知道的信息,引起读者对所讨论话题的兴趣,解释文章中的主要观点和论证,并提出读者学习该主题或思考相关问题的原因。
以下是目的部分的内容:"1.3 目的本文旨在介绍三相电机矢量控制的基本概念和原理,以及矢量控制在工业领域中的重要性和应用。
通过本文的阐述,读者将能够了解矢量控制技术的优势以及在各种应用领域中的实际运用情况。
此外,本文也旨在强调矢量控制技术的重要性,展望未来该领域的发展趋势,并鼓励读者深入学习和思考相关问题,以促进该技术在工业生产中的进一步应用和发展。
"2.正文2.1 三相电机矢量控制概述三相电机矢量控制是一种高级电机控制技术,通过控制电机的电流和电压来实现精确的转速和转矩控制。
与传统的矢量控制技术相比,三相电机矢量控制可以更精准地控制电机的运行状态,提高了电机的性能和效率。
矢量控制技术的原理和方法矢量控制技术是一种重要的控制方法,广泛应用于工程、自动化、电子等领域。
本文将介绍矢量控制技术的原理和方法,包括矢量控制的基本概念、矢量控制的原理和实现方法等。
一、矢量控制的基本概念矢量控制是一种基于矢量分析的控制方法,它通过对矢量参数的控制实现对系统的控制。
矢量控制可以综合考虑系统的多个参数,并通过对参数的优化控制来实现系统的稳定性和优化性能。
二、矢量控制的原理矢量控制的原理是将系统的输入和输出表示为矢量形式,通过对输入和输出之间的关系进行矢量分析,建立控制模型,并通过对模型中的矢量参数进行控制来实现对系统的控制。
矢量控制的原理主要基于以下几个基本概念:1. 矢量变换:通过对输入和输出信号进行矢量变换,将其表示为矢量形式。
常用的矢量变换方法有坐标变换、矩阵变换等。
2. 矢量分析:通过对输入和输出之间的关系进行矢量分析,建立系统的数学模型。
矢量分析可以将系统的复杂关系简化为矢量之间的相互作用。
3. 矢量控制器:根据系统的模型和控制要求,设计合适的矢量控制器。
矢量控制器可以对系统的输入矢量进行优化控制,以达到系统的稳定性和性能要求。
三、矢量控制的方法矢量控制的方法主要包括直接矢量控制和间接矢量控制两种。
1. 直接矢量控制:直接矢量控制是指将系统的输入矢量直接控制到期望值,并通过对输出矢量的反馈控制来校正误差。
直接矢量控制简单直观,但对信号的响应要求较高,容易受到系统参数波动的影响。
2. 间接矢量控制:间接矢量控制是通过对系统的输入和输出进行变换,将系统的输入控制为期望矢量,通过调整系统的参数来实现对输出的控制。
间接矢量控制相对复杂,但对系统的鲁棒性和稳定性较强。
根据系统的特点和要求,可以选择合适的矢量控制方法。
一般来说,对于要求较高的系统,可以采用间接矢量控制方法,以提高系统的稳定性和控制性能。
四、矢量控制技术的应用矢量控制技术在工程、自动化、电子等领域有广泛的应用。
例如,在电机控制中,可以采用矢量控制技术实现电机的精确控制;在工业自动化中,可以采用矢量控制技术实现系统的优化控制;在电子通信中,可以采用矢量控制技术实现信号的高效传输等。
福建工程学院研究生课程论文课程名称电机及其系统分析教师姓名研究生姓名研究生学号研究生专业电气工程研究方向电力工程年级一年级所在学院信息学院日期2016年01 月13日评语矢量控制技术的发展以及在应用中的改善 摘要:电机在很多场合得到了广泛的使用,因为它具有的独特优点,例如它为现代运动控制系统提供了一种具有诸多优点和适用广泛的装置。
异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。
在上世纪70年代西门子工程师F.Blaschke 首先提出异步电机矢量控制理论来解决交流电机转矩问题。
矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。
关键词:矢量控制,异步电机,解耦ABSTRACT:In many occasions, the motor has been widely used because it has unique advantages, such as it provides a lot of advantages and is suitable for a wide range of modern device having the motion control system. Dynamic mathematical model of the induction motor is a high order, nonlinear, strongly coupled multivariable systems. In the 1970s, Siemens engineers F.Blaschke first proposed induction motor vector control theory to solve the problem of the AC motor torque. The basic principle of vector control is achieved by measuring and controlling asynchronous motor stator current vector, based on the principle of field-oriented asynchronous motor excitation current and torque current control, respectively, so as to achieve the purpose of control of induction motor torque.Key Word : Vector control ,Induction motor ,Decoupling0、序言异步电动机的数学模型是一个极其复杂的模型。
电机矢量控制原理
电机矢量控制是一种基于电机空间矢量理论的控制方法,旨在实现精确的电机控制和高效的能量转换。
其原理是通过精确控制电机的电压和电流矢量,使电机能够运行在理想状态下。
电机矢量控制的关键是通过独立控制电机的磁场和转矩两个矢量,从而实现对电机速度、转矩和定位的精确控制。
磁场矢量可以通过控制电机的磁通和磁场方向来实现,而转矩矢量可以通过控制电机的驱动力矩和速度来实现。
实现电机矢量控制的关键是通过空间矢量PWM技术来控制电
机的相电流。
在每个电气周期内,根据电机的磁场和转矩需求,计算出相应的磁场和转矩矢量,然后将其分解为两个正交矢量,分别控制电机的磁通和电流。
具体来说,磁通矢量控制是通过控制电机的磁通大小和方向来实现的。
在每个电气周期内,根据电机的磁通需求,计算出磁通矢量的大小和方向,然后将其转换为对应的电压指令,通过PWM技术控制电机的相电压,从而实现磁通的控制。
转矩矢量控制是通过控制电机的驱动力矩和速度来实现的。
在每个电气周期内,根据电机的转矩需求,计算出转矩矢量的大小和方向,然后将其转换为对应的电流指令,通过PWM技术
控制电机的相电流,从而实现转矩的控制。
最后,将磁通矢量和转矩矢量重新合成为一个矢量,将其转换为对应的电压和电流指令,通过PWM技术施加于电机的相电
压和电流,从而实现电机的精确控制。
总的来说,电机矢量控制通过独立控制电机的磁场和转矩两个矢量,从而实现对电机速度、转矩和定位的精确控制。
其核心原理是通过空间矢量PWM技术控制电机的相电流,从而实现对电机磁通和转矩的控制,以提高电机的性能和效率。
电机矢量控制技术嘿,咱今儿来聊聊电机矢量控制技术。
这玩意儿啊,就像是给电机安上了一双神奇的翅膀,让它能更灵活、更高效地飞起来!你想啊,电机就像是一辆赛车,而矢量控制技术呢,就是那高级的赛车调校。
普通的控制方法,就好比是让赛车沿着一条固定的赛道跑,虽然也能跑,但总觉得少了点啥。
可矢量控制技术一来,哇塞,那可就不一样啦!它能让电机根据实际需求,随心所欲地调整自己的速度和方向,就像赛车在各种复杂的赛道上都能游刃有余地飞驰。
这技术啊,就像是一个超级厉害的指挥家,能精准地指挥着电机这个“乐团”演奏出最美妙的乐章。
它能把电流和电压这些“音符”巧妙地组合起来,让电机发出最和谐、最有力的“声音”。
而且哦,它还特别聪明,能快速适应各种不同的工作环境和要求。
比如说,在一些需要高精度控制的场合,像数控机床啦、机器人啦,矢量控制技术就能大显身手。
它能让这些设备的动作像舞蹈家一样优雅而精准,丝毫不会出差错。
这可比那种“粗线条”的控制方式厉害多了吧!再想想,要是没有矢量控制技术,我们的很多现代化设备会变成啥样呢?可能就会变得笨笨的,反应迟钝,工作效率也大打折扣。
那我们的生活不就没那么方便、快捷啦?所以说啊,这电机矢量控制技术可真是个了不起的发明!它就像是隐藏在机器背后的魔法,默默地为我们的生活带来了巨大的改变。
我们每天用的电器、开的汽车,说不定里面都有它在辛勤工作呢!它让电机变得更强大、更智能,也让我们的世界变得更加精彩。
咱可别小看了这小小的技术,它背后蕴含着无数科学家和工程师的智慧和心血呢!他们不断地钻研、探索,才让矢量控制技术越来越完善,越来越厉害。
这不正应了那句老话嘛,“台上一分钟,台下十年功”。
总之呢,电机矢量控制技术真的是太重要啦!它就像是一把开启未来之门的钥匙,为我们打开了一个充满无限可能的世界。
你说,我们能不好好珍惜和利用它吗?难道不应该对这些科学家和工程师们竖起大拇指吗?。
矢量控制基本原理矢量控制(FOC,Field-Oriented Control)是一种电机控制技术,旨在通过控制电机的磁场方向和大小,实现高效、高性能的运动控制。
它广泛应用于交流电机(AC)驱动系统中,如感应电机(IM)和永磁同步电机(PMSM)。
矢量控制的基本原理是将三相交流电机的控制转换为两个独立的控制回路:磁场定向控制回路和磁场强度控制回路。
磁场定向控制回路用于控制电机的磁场方向,使其与转子磁场同步,从而实现高效的转矩产生。
磁场强度控制回路用于控制电机的磁场大小,以实现所需的转矩和速度。
矢量控制的第一步是通过电流传感器或估算方法测量电机的三相电流。
然后,使用Clarke和Park变换将三相电流转换为直角坐标系中的磁场分量。
Clarke变换将三相电流转换为αβ坐标系,其中α轴与电流矢量之和对齐,β轴与电流之差对齐。
Park变换将αβ坐标系转换为dq坐标系,其中d轴对齐于转子磁场方向,q轴垂直于d轴。
在磁场定向控制回路中,通过控制q轴电流为零,使电机的磁场与转子磁场同步。
这样,电机的转子磁场就可以有效地与定子磁场相互作用,从而产生所需的转矩。
磁场定向控制通常使用PID控制器来控制q轴电流,并根据速度和转矩需求调整PID控制器的参数。
在磁场强度控制回路中,通过控制d轴电流来控制电机的磁场大小。
磁场强度控制可以通过PID控制器来实现,其中PID控制器的输出是d轴电流的参考值。
根据转矩需求和电压限制,可以调整PID控制器的参数。
为了实现矢量控制,需要使用电机控制器来计算和控制磁场定向和磁场强度。
电机控制器通常使用高性能数字信号处理器(DSP)或微控制器来执行复杂的计算和控制算法。
电机控制器还需要与电机驱动器和其他外部设备进行通信,以接收传感器反馈和发送控制信号。
矢量控制的优点是能够实现高效的电机控制,提供高转矩和高响应性能。
它还可以通过控制电机的磁场方向和大小来实现高精度的位置和速度控制。
矢量控制还可以在低速和零速时提供高转矩,提高电机的起动和停止性能。
矢量控制技术的原理与实现矢量控制技术是一种使电动机能够稳定而高效地工作的控制方法。
它通过对电机的电流和磁场进行调节,实现对电机的精确控制。
本文将介绍矢量控制技术的原理和实现方法。
一、矢量控制技术的原理矢量控制技术是基于电机的空间矢量旋转理论而发展起来的。
其核心原理可以概括为以下两点:1. 空间矢量理论空间矢量理论是矢量控制技术的基础,它描述了电机在磁场空间中的运动和变化。
根据磁场空间的磁链和电磁力矩的理论特性,利用数学模型和矢量分析方法,可以准确地计算和控制电机的运动。
2. 矢量控制算法矢量控制技术通过矢量控制算法来实现对电机的精确控制。
该算法基于电机的电流和转矩方程,通过对电流和磁链的调节来控制电机的转矩和速度。
二、矢量控制技术的实现方法矢量控制技术的实现方法主要包括以下几个方面:1. 电流控制矢量控制技术首先需要对电机的电流进行控制。
通过电流控制器对电机的电流进行调节,使其能够按照预定的矢量轨迹运动。
电流控制器可以采用PID调节器、模糊控制器等,根据具体情况选择最合适的控制器。
2. 磁场定向矢量控制技术还需要对电机的磁场进行定向。
通过对电机的磁场进行定向,可以使电机产生特定方向的磁链,从而实现对电机的精确控制。
磁场定向可以通过空间矢量理论和矢量控制算法来实现。
3. 磁链调节矢量控制技术还需要对电机的磁链进行调节。
通过调节电机的磁链,可以实现电机的转矩和速度的控制。
磁链调节可以通过控制电机的电流和电压来实现,也可以通过改变电机的磁场分布来实现。
4. 动态反馈矢量控制技术还需要实时地对电机进行动态反馈。
通过传感器对电机的状态进行实时监测,可以及时发现和修正电机的运行状态,保证电机能够稳定而高效地工作。
常用的传感器包括位置传感器、速度传感器、电流传感器等。
总结:矢量控制技术是一种非常先进且有效的电机控制方法。
通过对电机的电流和磁场进行精确调节,可以实现对电机的精确控制和高效运行。
矢量控制技术的实现方法主要包括电流控制、磁场定向、磁链调节和动态反馈等方面。
福建工程学院研究生课程论文课程名称电机及其系统分析教师姓名研究生姓名研究生学号研究生专业电气工程研究方向电力工程年级一年级所在学院信息学院日期2016年01 月13日评语矢量控制技术的发展以及在应用中的改善 摘要:电机在很多场合得到了广泛的使用,因为它具有的独特优点,例如它为现代运动控制系统提供了一种具有诸多优点和适用广泛的装置。
异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。
在上世纪70年代西门子工程师F.Blaschke 首先提出异步电机矢量控制理论来解决交流电机转矩问题。
矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。
关键词:矢量控制,异步电机,解耦ABSTRACT:In many occasions, the motor has been widely used because it has unique advantages, such as it provides a lot of advantages and is suitable for a wide range of modern device having the motion control system. Dynamic mathematical model of the induction motor is a high order, nonlinear, strongly coupled multivariable systems. In the 1970s, Siemens engineers F.Blaschke first proposed induction motor vector control theory to solve the problem of the AC motor torque. The basic principle of vector control is achieved by measuring and controlling asynchronous motor stator current vector, based on the principle of field-oriented asynchronous motor excitation current and torque current control, respectively, so as to achieve the purpose of control of induction motor torque.Key Word : Vector control ,Induction motor ,Decoupling0、序言异步电动机的数学模型是一个极其复杂的模型。
总的归结起来可以异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统[1]。
而且在研究三相异步电动机的复杂的数学模型中,我们常常会做出以下几方面的假设。
第一,我们往往会忽略空间谐波。
第二、忽略磁路饱和。
并且假设它们的自感和互感都是线性的。
第三、忽略铁芯损耗。
第四、不考虑频率和温度对绕组的影响。
由于感应电动机的励磁和电枢都是同一个绕组,所以转矩和磁链之间就相对比较复杂。
电磁转矩的物理表达式为22ϕφCOS I C T T e =可以知道感应电动机各个参量相互耦合,这也是感应电动机难以控制的根本原因[2]。
由于矢量控制具有转矩控制的线性特性,控制效率很高,调节器的设计也比较容易实现。
而且,速度的调节较宽在接近零转速时仍然可以带动额定负载运行,具有良好的起制动性能,所以矢量控制技术才会被人们慢慢的所利用[3]。
异步电机数学模型的电压方程、磁链方程、转矩方程和运动方程如下:电压方程:磁链方程:转矩方程:运动方程:1、矢量控制技术的发展矢量控制理论是由德国F.Blaschke首先提出。
这一理论是从电机统一理论、机电能量转换和矢量变换理论的基础上发展起来的,基本思想是把异步电动机模拟转化为直流电机来加以达到更好更简便的控制[4]。
在建立数学模型的时候一般都会按上述方法将电机理想化。
矢量控制在国际上一般多称为磁场定向控制,也就是把磁场的方向作为坐标轴的基准方向,电动机电流矢量的大小、方向均由瞬时值来表示。
这个理论是1968 年Darmstader 工科大学的 Hasse 博士初步提出的。
在1971年德国西门子公司 F.Blaschke 博士等提出的“感应电机磁场定向的控制原理”和美国 P.C.Custman 与A.A.Clark 申请的专利“感应电机定子电压的坐标变换控制”奠定了矢量控制的基础。
这一阶段,矢量控制并没能完全进入工业运用中。
在从 20 世纪 80 年代中期到 20 世纪 90 年代初期,欧洲电力电子会议(EPE)论文集中涉及到矢量控制的论文占有很大比例。
在这当中,德国SIEMENS 公司、Aachen 技术大学电力电子和电气传动研究院和德国 Braunchweig 技术大学 W.Leonhard、R.Gabriel、G.Heinemann 等教授更是为矢量控制的应用做出了突出贡献,在应用微处理器的矢量控制研究中取得了许多重大进展,促进了矢量控制的实用化。
20世纪90年代一方面随着交流电气的迅速发展,电力电子器件的发明使用促进了交流调速技术的的重大变革。
另一方面另一方面,交流调速控制技术,尤其是复杂的矢量控制算法的实现,离不开微处理器技术和数字化控制技术取得的巨大进步。
进入 21 世纪以来,矢量控制的研究仍在如火如荼地进行,德国、日本和美国依然走在世界的前列[5]。
2、矢量控制技术的发展应用现在的很多研究和实验都不再是将矢量控制单独作用于对力矩的控制,而是选择结合其他的方法和元器件来实现控制。
例如很多场合会将矢量控制与DSP相结合使用,通过控制定子电流以及利用PI控制器来控制力矩。
有些场合也将直接转矩控制和矢量控制相结合[6]。
根据矢量控制的优缺点,人们逐渐的利用他们自身的特点与其他控制的方法组合进行相互补充完善系统。
与滞后控制相比,空间矢量控制具有较低的频率和损耗,而滞后控制具有较高的开关损耗。
因此,将两种方法进行组合用于神经网络控制,能减少系统损耗,发挥最大的控制效果[7]。
不仅是上述的一些方面,矢量控制技术也被用在变压器、逆变器和整流器等工作空间中[8-11]。
如今,矢量控制技术也不仅仅只是应用于工业生产,例如它也正在进入一些国家的军队国防事业[12]。
尽管矢量控制技术的产生给人们的生活和工业生产带来了很大的改善,但矢量控制技术对感应电动机的控制也并非是一种绝对精确的控制方法。
因为只有当转子磁场位置定向准确时,定子电流的励磁分量和转矩分量才可以完全的解耦,从而可以分别的控制,获得类似直流电机的控制性能。
可是在普通的转子磁场定向的异步电机矢量控制系统中,由于转子时间常数变化、磁饱和、涡流等因数的影响,想要实现异步电机转子磁场准确定向难度是很大的,尤其是在高频、弱磁的工作条件之下[13-15]。
异步电机的参数往往都会跟随温度、频率和饱和程度的不同而变化。
针对矢量控制对参数的敏感性,国内外的很多文献采用了一些自适应的控制和磁链观测方法[16-19],并且提出了最小二乘法、MARS等多种方法来实时地辨别转子时间常数,但是要同时考虑饱和、涡流等多种因素还是相当困难的。
目前矢量控制系统常用的控制方案有三种:按转子磁链定向、按定子磁链定向和按气隙磁链定向[20]。
在感应电机的矢量控制中,磁链观测准确性直接影响磁链的控制。
磁链观测误差会通过控制电机的磁链偏大或者偏小,从而导致电机效率过低或者过流,磁链准确观测是实现高性能电机传动系统的关键环节,因此如何提高磁链的观测的准确性是目前磁链观测研究的主要方向。
对改善感应电机的性能,扩大感应电机的调速范围和稳定运行区域都是非常有意义的研究工作,受到工程界的高度关注[21-23]。
而对于矢量控制异步电机转子时间常数受其它因素影响而变化的问题,文献[24]中提出了基于卡尔曼滤波器的转子时间常数的辨识补偿方法。
它具有较高的精确性,借助DSP可以实现实时补偿控制,并且通过仿真验证了该方法的可行性。
尽管矢量控制技术已经得到了很大的发展,也在专业领域得到认可和应用,但是由于电动机自身的结构和材料的影响,例如,由于电机铁损的存在,使得矢量控制变在精确度上存在着一定的偏移[25]因此,近几年各国的学者都在致力于感应电机的高性能控制,是感应电机的动态、稳态控制性能得到了很大的提高,甚至可以直接与直流电机的控制性能相比较[26]。
3、总结矢量控制技术作为对电机的一种控制方法,在很大程度上改变了工业的发展速度,并且也更好的保证了产品的质量。
同时,科学技术是没有极限的。
尽管就现有的一些生活例子可以反映出技术带来的巨大变化,但是技术的提升或者说是补充和完善还具有很大的研究意义,如何能将矢量控制技术与其他电力电子器件或者其它方法共同作用于工业生产是一个很值得学者专家努力的方向。
参考文献[1]汤新舟. 永磁同步电机的矢量控制系统[D]. 浙江大学, 2005.[2]徐占国. 电动车用感应电机矢量控制系统的研究[D]. 大连理工大学, 2010:26-27.[3]李向正, 闫杰生. KdV方程的一种新解法[J]. 河南科技大学学报:自然科学版, 2005, 26(3):73-75.[4]郑安平, 孔汉, 王磊. 永磁同步电动机矢量控制系统建模与仿真[J]. Journal of Zhengzhou University of Light Industry:naturalence Edition, 2008(1):83-85.[5]潘言全. 矢量控制的发展与研究现状[J]. 黑龙江科技信息, 2009(36):106-106.[6]Boulghasoul, Z, Elbacha, A, Elwarraki, E, et al. Combined Vector Control and Direct Torque Control an experimental review and evaluation[C]// Multimedia Computing and Systems (ICMCS), 2011 International Conference on. IEEE, 2011:1-6.[7]Chen X, Hang Z, Zhao J. A new Improvement Strategy based on hysteresis space vector control of Grid-connected inverter[C]// Advanced Power System Automation and Protection (APAP), 2011 International Conference on. IEEE, 2011:1613-1617.[8]Fan L, Miao Z, Yuvarajan S, et al. A comparison of slip control, FMA control and vector control in DFIG converter[C]// Industrial Electronics, 2008. IECON 2008. 34th Annual Conference of IEEE. IEEE, 2008:2075-2081.[9]Zhang X, Ma K, Li N. Research on two space vector current control strategies for three phase voltage source PWM rectifier[C]// Electrical and Control Engineering (ICECE), 2011 International Conference on. IEEE, 2011:4931-4934.[10]Fu X, Li S. A Novel Neural Network Vector Control Technique for Induction Motor Drive[J]. IEEE Transactions on Energy Conversion, 2015:1-10.[11]Hussain S, Bazaz M A. Review of vector control strategies for three phase induction motor drive[C]// Recent Developments in Control, Automation and Power Engineering (RDCAPE), 2015 International Conference on. IEEE, 2015.[12]Croft A M, Baker D ,, Bertele M J V. An evidence-based vector control strategy for military deployments: the British Army experience.[J]. Médecine Tropicale Revue Du Corps De SantéColonial, 2001, 61(1):91-8.[13]Goertz A W, Schmidt M ,, Lindner K H, et al. Combined impact of iron loss and main flux saturation on operation of vector controlled induction machines[C]// International Conference on Power Electronics & Variable Speed Drives. IET, 1996:36-41.[14]Dittrich A. Parameter sensitivity of procedures for on-line adaptation of the rotor time constant of induction machines with field oriented control[J]. IEE Proceedings - Electric Power Applications, 1994, 141(6):353-359.[15]陆海峰, 瞿文龙, 张磊,等. 一种基于无功功率的异步电机矢量控制转子磁场准确定向方法[J]. 中国电机工程学报, 2005, 25(16):116-120.[16]冯光, 黄立培, 朱东起. 采用自抗扰控制器的高性能异步电机调速系统[J]. 中国电机工程学报, 2001, 21(10):55-58.[17]张春朋, 林飞, 宋文超,等. 基于直接反馈线性化的异步电动机非线性控制[J]. 中国电机工程学报, 2003, 23(2):99-102.[18]陈峰, 徐文立, 王旭. 基于电磁子系统Lyapunov稳定的异步电动机非线性标量控制[J]. 中国电机工程学报, 2000, 20(6):53-57.[19]张春朋, 林飞, 宋文超,等. 基于定子电流矢量定向的异步电机转子磁链估计器及其应用研究[J]. 中国电机工程学报, 2003, 23(8):155-158.[20]李华德.电力拖动控制系统[M].北京:电子工业出版社,2006.[21]李永东, 李明才. 感应电机高性能无速度传感器控制系统--回顾、现状与展望[J]. 电气传动, 2004, 34(1):4-10.[22]陈伯时, 杨耕. 无速度传感器高性能交流调速控制的三条思路及其发展建议[J]. 电气传动, 2006, 36(1):3-8.[23]宋文祥, 周杰. 感应电机磁链观测及矢量控制低速发电运行控制方法综述[J]. 电机与控制应用, 2013, 40(11):1-7.[24]葛琼璇, 矢量控制异步电机转子时间常数的实时补偿[J]. 电工电能新技术, 1999(2):49-53.[25]张云, 孙力, 吴凤江,等. 考虑铁耗的感应电机模型及对矢量控制的影响[J]. 电机与控制学报, 2007, 11(4):359-363.[26]李永东. 交流电机数字控制系统[M]. 机械工业出版社, 2012:88-96。