机电传动控制——机电传动的动力学基础
- 格式:ppt
- 大小:640.50 KB
- 文档页数:26
《机电传动控制》(第五版)教案第1章绪论1.1 机电系统的组成=机械运动部件+机电传动+电气控制系统。
1.机械运动部件——完成生产任务的基础,机械执行部分;2.机电传动———=电力传动或电力拖动,是驱动生产机械运动部件的原动机的总称;3.电气控制系统——控制电动机的系统。
1.2 机电传动的目的和任务1.机电传动的目的——将电能转变为机械能,实现生产机械的启动、停止、以及速度调节,满足各种生产工艺的要求,保证生产过程的正常进行2.机电传动的任务①广义上讲——使生产机械设备、生产线、车间甚至整个工厂都实现自动化。
②狭义上讲——专指控制电动机驱动生产机械,实现产品数量的增加、质量的提高、生产成本的降低、工人劳动条件的改善以及能源的合理利用。
1.3 机电传动控制的发展概况一、驱动系统的发展阶段:1.成组拖动——一台电动机拖动一根天轴—→通过带轮和传动带—→分别拖动各(一组)生产机械。
生产效率低、劳动条件差,一旦电动机或传动环节发生故障则造成成组生产机械停车。
2.单电动机——一台电动机拖动一台生产机械,较成组拖动进了一步。
但当生产机械的运动部件较多时,其机械传动机构则十分复杂。
3.多电动机拖动——一台生产机械的每一个运动部件都有专门的电动机拖动。
不仅大大简化了生产机械的传动机构,而且控制灵活,为自动化提供了有利条件,是现代化机电传动的典型方式。
二、控制系统的发展阶段:1.接触器+继电器控制——出现在20世纪初,应用广泛、成本低;但控制速度慢、精度差。
2.电动机放大机控制(30年代)、磁放大机控制(40~50年代)——从断续控制发展到连续控制,并具有了输出反馈环节,简化了控制系统、减少了电路触点、提高了可靠性。
3.大功率可控电力半导体器件控制——具有效率高、反应快、寿命长、可靠性高、维修容易、体积小、重量轻等优点。
由此,开辟了机电传动控制的新纪元。
4.采样控制——数控技术+微机应用的高水平断续控制,由于采样周期<<控制对象的变化周期,∴≌连续控制。

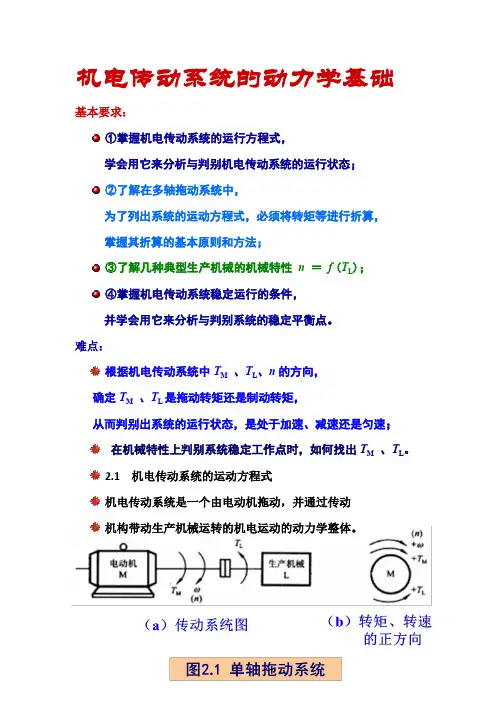
机电传动系统的动力学基础基本要求:①掌握机电传动系统的运行方程式,学会用它来分析与判别机电传动系统的运行状态;②了解在多轴拖动系统中,为了列出系统的运动方程式,必须将转矩等进行折算,掌握其折算的基本原则和方法;③了解几种典型生产机械的机械特性n =f (TL);④掌握机电传动系统稳定运行的条件,并学会用它来分析与判别系统的稳定平衡点。
难点:根据机电传动系统中TM 、TL、n的方向,确定TM 、TL是拖动转矩还是制动转矩,从而判别出系统的运行状态,是处于加速、减速还是匀速;在机械特性上判别系统稳定工作点时,如何找出TM 、TL。
2.1 机电传动系统的运动方程式机电传动系统是一个由电动机拖动,并通过传动机构带动生产机械运转的机电运动的动力学整体。
2.1 机电传动系统的运动方程式机电传动系统的运动方程式是描述机电系统机械运动规律的最基本方程式,它决定着系统的运行状态。
dn动态转矩T d =T M -T L ;加速度 a =dt=0时,a=0 ,表示系统处于稳态,系统为匀速运动。
当Td≠0时,a≠0 ,表示系统处于动态,当TdT>0时,拖动转矩>制动转矩,a为正,系统加速运动;dT<0时,拖动转矩<制动转矩,a为负,系统减速运动。
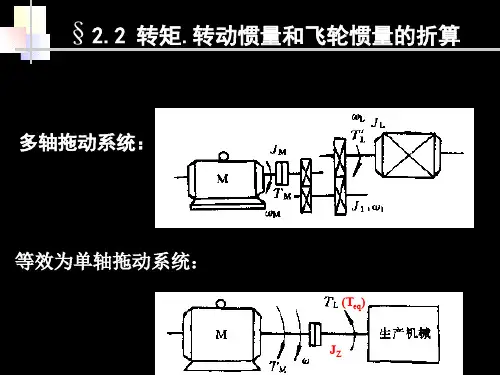
d2.2 转矩、转动惯量和飞轮转矩的折算机电传动系统运动方程式中的转矩、转动惯量及飞轮转矩等,均分别为同一轴上的数值。
若运动系统为多轴系统,则必须将上述各量折算到同一转轴上才能列出整个系统的运动方程式。
由于一般均以传动系统的电动机轴为研究对象,因此,一般都是将它们折算到电动机轴上。
转矩折算应依据系统传递功率不变的原则。
转动惯量和飞轮转矩折算应依据系统贮存的动能 不变的原则。
2.2.1 负载转矩的折算依据系统传递功率不变的原则 实际负载功率=折算后的负载功率)7.2(cL L LM L L L M L L L j T T j T T T T T ηωωωω'='='=='多轴旋转拖动系统⋯=⋯=321321 传动效率)(/ 速比ηηηηωωc LM j j j j多轴直线运动系统(下放重物))8.2(55.9602Mc L Mc L M L n FvT n Fv T T Fv ηπωωηω====)9.2(55.9c ML n FvT η'=c c cc ηηηη<'-='122.2.2转动惯量和飞轮转矩的折算(旋转型)依据动能守恒原则,折算到电机轴上的总转动惯量为数。

第二章机电传动系统的动力学基础1. 引言在机械工程中,机电传动系统是指将电力或者其他形式的动力转化为机械运动的系统。
机电传动系统的设计与分析依赖于对动力学基础的理解。
本章将介绍机电传动系统的动力学基础,并探讨其在机械工程中的应用。
2. 动力学基础的概念2.1 动力学的基本概念动力学是研究物体在受力作用下运动规律的科学。
在机电传动系统中,动力学研究的重点是描述和分析物体受到力后的运动状态和运动规律。
2.2 机电传动系统的动力学模型机电传动系统可以用动力学模型来描述其运动规律。
动力学模型由四个基本要素组成:质点、力、力矩和功。
•质点:质点是物体的理想模型,具有质量但没有尺寸。
在机电传动系统中,质点被用来描述物体的运动状态。
•力:力是导致物体产生加速度的原因。
在机电传动系统中,力可以分为正向力和反向力,正向力使物体加速,而反向力使物体减速。
•力矩:力矩是力围绕某个轴产生转动的效果。
在机电传动系统中,力矩用来描述力对物体产生的转动效果。
•功:功是通过力对物体施加力学作用而产生的能量转移。
在机电传动系统中,功可以用来描述能量的转化和传递过程。
2.3 动力学基础的方程机电传动系统的动力学基础可以用一系列方程来描述。
其中,最基本的方程是牛顿第二定律和动能定理。
•牛顿第二定律:牛顿第二定律描述了力对物体产生加速度的关系。
其公式为 F = ma,其中 F 表示力,m 表示物体的质量,a 表示物体的加速度。
•动能定理:动能定理描述了物体的动能与力对其做功之间的关系。
其公式为 K = 1/2 * mv^2,其中 K 表示物体的动能,m 表示物体的质量,v 表示物体的速度。
3. 机电传动系统的应用机电传动系统的动力学基础在机械工程中有着广泛的应用。
下面列举了几个常见的应用场景:3.1 机械设计在机械设计中,动力学基础被用来分析和优化机械系统的运动性能。
通过对力、力矩和功的计算和分析,设计工程师可以确定合适的传动比例和功率需求,以实现理想的机械运动效果。
【电气传动系统动力学基础】机电传动系统的动力学基础电气传动系统动力学基础1.1电气传动系统的运动方程式电力拖动装置通常由电动机、工作机构、控制设备和电源四部分组成。
电动机和工作机构之间一般还有传动机构,把电动机的运动经过中间变速或变换运动方式后再传给生产机械的工作机构。
(一)运动方程式电动机(M)生产机械TL TM M +TL M 图2.1 单轴拖动系统对于直线运动,方程式为F-FZ= m (N) 式中F-拖动力FZ-阻力m-惯性力m的单位为kg 对于旋转运动,方程式为T-TZ =J(N·m)式中T-拖动转矩TZ-阻转矩(或称负载转矩)J-惯性转矩(或称加速转矩)通常将转动惯量J用飞轮矩GD2来表示,它们之间的关系为J=mp2= 式中m与G-转动部分的质量(kg)与重量(N);与D-惯性半径与直径(m);g=9.81m/s2 -重力加速度再将机械角速度用转速n表示,则可得运动方程式的实用形式T –TZ= 式中GD2-飞轮矩N·m2 电动机的工作状态可由运动方程式判断(1)当T=TZ ,=0 ,则n=0 或n=常值电动机静止或等速旋转,即拖动系统稳定运行。
(2)当TTZ ,0 ,电力拖动系统加速运行。
(3)当T n a,TM TL ,即n↓(干扰),消除后TM - TL 0,加速第二章直流电动机的传动特性 2.1直流电机的基本工作原理及结构一、直流电机的基本结构1、主磁极——建立主磁场(N、S交替排列)a、主极铁心——磁路,由1.0~1.5mm厚钢板构成b、励磁绕组——电路、由电磁线绕制2、机座——磁路的一部分(支承)框架,钢板焊接或铸刚3、电枢铁心——磁路,0.5mm厚硅钢片叠压而成(外圆冲槽)4、电枢绕组——电路。
电磁线绕制(闭合回路,由电刷分成若干支路)5、换向器——换向片间相互绝缘(用云母或塑料)6、电刷装置a、电刷——石墨或金属石墨b、刷握、刷杆、连线(铜丝辨)换向极——改善换向,由铁心、绕组构成(放置于主极之间或绕组与电枢绕组串联)二、基本工作原理直流电机的构成(1).定子:主磁极、换向磁极、机座、端盖、电刷装置;(2).转子:电枢铁心、电枢绕组、换向装置、风扇、转轴(3).气隙**注意:同步电机—旋转磁极式;直流电机—旋转电枢式。
习题与试探题第二章机电传动系统的动力学基础说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是由电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩确实是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
从运动方程式如何看出系统是处于加速,减速,稳态的和静态的工作状态。
T M-T L>0说明系统处于加速,T M-T L<0 说明系统处于减速,T M-T L=0说明系统处于稳态(即静态)的工作状态。
试列出以下几种情形下(见题图)系统的运动方程式,并说明系统的运动状态是加速,减速,仍是匀速?(图中箭头方向表示转矩的实际作用方向)T M TT M=T L T M< T LT M-T L>0说明系统处于加速。
T M-T L<0 说明系统处于减速T M T L T M T LT M> T L T M> T L系统的运动状态是减速系统的运动状态是加速T M T L T T LT M= T L T M= T L系统的运动状态是减速系统的运动状态是匀速多轴拖动系统什么缘故要折算成单轴拖动系统?转矩折算什么缘故依据折算前后功率不变的原那么?转动惯量折算什么缘故依据折算前后动能不变的原那么?因为许多生产机械要求低转速运行,而电动机一样具有较高的额定转速。
如此,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
因此为了列出系统运动方程,必需先将各转动部份的转矩和转动惯量或直线运动部份的质量这算到一根轴上。
转矩折算前后功率不变的原那么是P=Tω, p不变。
转动惯量折算前后动能不变原那么是能量守恒MV=ω2什么缘故低速轴转矩大,高速轴转矩小?因为P= Tω,P不变ω越小T越大,ω越大T 越小。
什么缘故机电传动系统中低速轴的GD2逼高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P不变转速越小GD2越大,转速越大GD2越小。