20130513蜗杆与蜗轮的传动比及配对条件
- 格式:doc
- 大小:19.50 KB
- 文档页数:1
蜗轮、蜗杆的计算公式:1,传动比=蜗轮齿数÷蜗杆头数2,中心距=(蜗轮节径+蜗杆节径)÷23,蜗轮吼径=(齿数+2)×模数4,蜗轮节径=模数×齿数5,蜗杆节径=蜗杆外径-2×模数6,蜗杆导程=π×模数×头数7,螺旋角(导程角)tgβ=(模数×头数)÷蜗杆节径一.基本参数:(1)模数m和压力角α:在中间平面中,为保证蜗杆蜗轮传动的正确啮合,蜗杆的轴向模数m a1和压力角αa1应分别相等于蜗轮的法面模数m t2和压力角αt2,即m a1=m t2=mαa1=αt2蜗杆轴向压力角与法向压力角的关系为:tgαa=tgαn/cosγ式中:γ-导程角。
(2)蜗杆的分度圆直径d1和直径系数q为了保证蜗杆与蜗轮的正确啮合,要用与蜗杆尺寸相同的蜗杆滚刀来加工蜗轮。
由于相同的模数,可以有许多不同的蜗杆直径,这样就造成要配备很多的蜗轮滚刀,以适应不同的蜗杆直径。
显然,这样很不经济。
为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径d1,而把及分度圆直径和模数的比称为蜗杆直径系数q,即:q=d1/m常用的标准模数m和蜗杆分度圆直径d1及直径系数q,见匹配表。
(3)蜗杆头数z1和蜗轮齿数z2蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐z1=1,2,4,6。
选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显着减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。
另一方面z2也不能过多,当z2>80时(对于动力传动),蜗轮直径将增大过多,在结构上相应就须增大蜗杆两支承点间的跨距,影响蜗杆轴的刚度和啮合精度;对一定直径的蜗轮,如z2取得过多,模数m就减小甚多,将影响轮齿的弯曲强度;故对于动力传动,常用的范围为z2≈28-70。
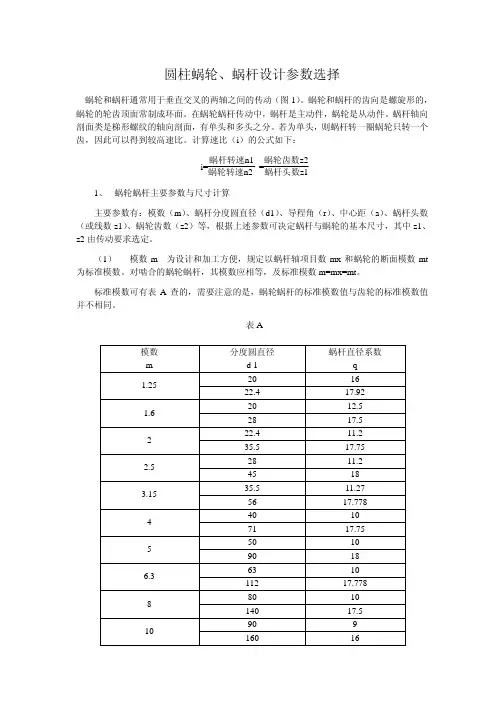
圆柱蜗轮、蜗杆设计参数选择蜗轮和蜗杆通常用于垂直交叉的两轴之间的传动(图1)。
蜗轮和蜗杆的齿向是螺旋形的,蜗轮的轮齿顶面常制成环面。
在蜗轮蜗杆传动中,蜗杆是主动件,蜗轮是从动件。
蜗杆轴向剖面类是梯形螺纹的轴向剖面,有单头和多头之分。
若为单头,则蜗杆转一圈蜗轮只转一个齿,因此可以得到较高速比。
计算速比(i)的公式如下:i=蜗杆转速n1蜗轮转速n2=蜗轮齿数z2蜗杆头数z11、蜗轮蜗杆主要参数与尺寸计算主要参数有:模数(m)、蜗杆分度圆直径(d1)、导程角(r)、中心距(a)、蜗杆头数(或线数z1)、蜗轮齿数(z2)等,根据上述参数可决定蜗杆与蜗轮的基本尺寸,其中z1、z2由传动要求选定。
(1)模数m 为设计和加工方便,规定以蜗杆轴项目数mx和蜗轮的断面模数mt 为标准模数。
对啮合的蜗轮蜗杆,其模数应相等,及标准模数m=mx=mt。
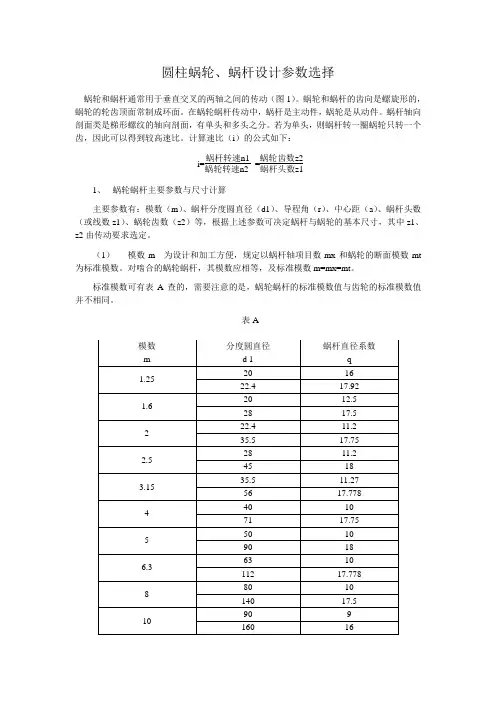
标准模数可有表A查的,需要注意的是,蜗轮蜗杆的标准模数值与齿轮的标准模数值并不相同。
表A图1图2(2)蜗杆分度圆直径d1 再制造蜗轮时,最理想的是用尺寸、形状与蜗杆完全相同的蜗轮滚刀来进行切削加工。
但由于同一模数蜗杆,其直径可以各不相同,这就要求每一种模数对应有相当数量直径不同的滚刀,才能满足蜗轮加工需求。
为了减少蜗轮滚刀数目,在规定标准模数的同时,对蜗杆分度圆直径亦实行了标准化,且与m 有一定的匹配。
蜗杆分度圆直径d1与轴向模数mx之比为一标准值,称蜗杆的直径系数。
即q=蜗杆分度圆直径模数=d1m d1=mq有关标准模数m 与标准分度圆直径d1的搭配值及对应的蜗杆直径系数参照表A (3) 蜗杆导程角r 当蜗杆的q 和z1选定后,在蜗杆圆柱上的导程角即被确定。
为导程角、导程和分度圆直径的关系。
tan r=导程分度圆周长 = 蜗杆头数x 轴向齿距分度圆周长 =z1px d1π =z1πm πm q =z1q相互啮合的蜗轮蜗杆,其导程角的大小与方向应相同。
(4) 中心距a 蜗轮与蜗杆两轴中心距a 与模数m 、蜗杆直径系数q 以及蜗轮齿数z2间的关系式如下:a=d1+d22 =m q(q+z2)蜗杆各部尺寸如表B蜗轮各部尺寸如表C2、 蜗轮蜗杆的画法(1) 蜗杆的规定画法 参照图1图2 (2)蜗轮的规定画法 参照图1图2 (3)蜗轮蜗杆啮合画法 参照图1图2.。
(一)涡轮蜗杆配合条件:A)蜗杆轴向(法向)模数=涡轮的端面模数;B)轴向压力角=端面压力角;C)蜗杆分度圆导程角=涡轮分度圆螺旋角;(二)自锁条件:当蜗杆的螺旋升角小与啮合面的当量摩擦角时,可实现自锁功能;一般自锁时:螺旋角(导程角)约小于等于4°,详细见下列:摩擦系数:0.06 自锁角度<3°29′11″0.07 自锁角度<4°03′57″0.08 自锁角度<4°38′39″(三)螺旋角应用:齿轮螺旋角一般(8—25)°,高速轻载采用较大螺旋角(导程大),低速重载采用较小的螺旋角(导程小);A):低速重载:a):较涡轮蜗杆属易磨件,所以蜗杆耐磨性需大于涡轮,一般材料选择15Cr、20Cr、20CrMnTi等;碳、氮共渗处理;渗透厚度≥0.3mm;表面硬度:HRC45—55;b)涡轮材质选择其耐磨性较涡轮差些,一般选用特殊配置的耐磨性镍青铜、锡青铜等;1、 ZCuSn10P1(滑动速度可 25m/s);2、ZCuSn5Pb5Zn5(滑动速度<12m/s);3、铝青铜(滑动速度<4m/s),如 ZCuAl10Fe3,其减磨性和抗胶合性比锡青铜差,但强度高,价格便宜;4、灰铸铁(HT150、HT200)(滑动速度<2m/s),低速轻载传动中(四)齿轮变位系数:正变位:刀具远离齿中心的距离;负变位:刀具靠近齿中心的距离。
(五)齿轮重合度:1、重合度:齿合线长度/基圆齿距2、重合度越大,运行越顺畅,一般设计时需重合度≥1.3;(六)齿轮修缘:(可不进行修缘)1、直齿重合度ε≤1.089、斜齿轮重合度ε≤1.0时;2、螺旋角β>17.45°时。
圆柱蜗轮、蜗杆设计参数选择蜗轮和蜗杆通常用于垂直交叉的两轴之间的传动(图1)。
蜗轮和蜗杆的齿向是螺旋形的,蜗轮的轮齿顶面常制成环面。
在蜗轮蜗杆传动中,蜗杆是主动件,蜗轮是从动件。
蜗杆轴向剖面类是梯形螺纹的轴向剖面,有单头和多头之分。
若为单头,则蜗杆转一圈蜗轮只转一个齿,因此可以得到较高速比。
计算速比(i)的公式如下:i=蜗杆转速n1蜗轮转速n2=蜗轮齿数z2蜗杆头数z11、蜗轮蜗杆主要参数与尺寸计算主要参数有:模数(m)、蜗杆分度圆直径(d1)、导程角(r)、中心距(a)、蜗杆头数(或线数z1)、蜗轮齿数(z2)等,根据上述参数可决定蜗杆与蜗轮的基本尺寸,其中z1、z2由传动要求选定。
(1)模数m 为设计和加工方便,规定以蜗杆轴项目数mx和蜗轮的断面模数mt 为标准模数。
对啮合的蜗轮蜗杆,其模数应相等,及标准模数m=mx=mt。
标准模数可有表A查的,需要注意的是,蜗轮蜗杆的标准模数值与齿轮的标准模数值并不相同。
表A模数m 分度圆直径d 1蜗杆直径系数q20 161.2522.4 17.9220 12.5 1.628 17.522.4 11.2 235.5 17.7528 11.2 2.545 1835.5 11.27 3.1556 17.77840 10 471 17.7550 10 590 1863 10 6.3112 17.77880 10 8140 17.590 9 10160 16图1q=蜗杆分度圆直径模数=d1m d1=mq有关标准模数m 与标准分度圆直径d1的搭配值及对应的蜗杆直径系数参照表A (3) 蜗杆导程角r 当蜗杆的q 和z1选定后,在蜗杆圆柱上的导程角即被确定。
为导程角、导程和分度圆直径的关系。
tan r=导程分度圆周长 = 蜗杆头数x 轴向齿距分度圆周长=z1px d1π =z1πm πm q =z1q相互啮合的蜗轮蜗杆,其导程角的大小与方向应相同。
(4) 中心距a 蜗轮与蜗杆两轴中心距a 与模数m 、蜗杆直径系数q 以及蜗轮齿数z2间的关系式如下:a=d1+d22 =m q(q+z2)蜗杆各部尺寸如表B 名称代号 公式分度圆直径 d1齿顶高 ha1 齿根高 hf1 齿高 h1齿顶圆直径 da1 齿根圆直径 df1 轴向齿距 pxd 1=mq ha1=m hf1=1.2mh1=ha1+hf1=2.2m da1=d1+2ha1=d1+2m df1=d1-2hf1=d1+2.4m px=πm蜗轮各部尺寸如表C2、 蜗轮蜗杆的画法(1) 蜗杆的规定画法 参照图1图2 (2)蜗轮的规定画法 参照图1图2 (3)蜗轮蜗杆啮合画法 参照图1图2.。
蜗轮蜗杆的计算(总4页) -CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除蜗轮、蜗杆的计算公式:1,传动比=蜗轮齿数÷蜗杆头数2,中心距=(蜗轮节径+蜗杆节径)÷2 3,蜗轮吼径=(齿数+2)×模数 4,蜗轮节径=模数×齿数5,蜗杆节径=蜗杆外径-2×模数 6,蜗杆导程=π×模数×头数7,螺旋角(导程角)tg β=(模数×头数)÷蜗杆节径 一.基本参数:(1)模数m 和压力角α:在中间平面中,为保证蜗杆蜗轮传动的正确啮合,蜗杆的轴向模数m a1和压力角αa1应分别相等于蜗轮的法面模数m t2和压力角αt2,即 m a1=m t2=m αa1=αt2蜗杆轴向压力角与法向压力角的关系为: tgαa =tgαn /cosγ 式中:γ-导程角。
(2)蜗杆的分度圆直径d 1和直径系数q为了保证蜗杆与蜗轮的正确啮合,要用与蜗杆尺寸相同的蜗杆滚刀来加工蜗轮。
由于相同的模数,可以有许多不同的蜗杆直径,这样就造成要配备很多的蜗轮滚刀,以适应不同的蜗杆直径。
显然,这样很不经济。
为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径d1,而把及分度圆直径和模数的比称为蜗杆直径系数q ,即: q=d1/m常用的标准模数m 和蜗杆分度圆直径d1及直径系数q ,见匹配表。
(3)蜗杆头数z 1和蜗轮齿数z 2蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐 z1=1,2,4,6。
选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显着减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。
蜗轮蜗杆的传动比计算公式蜗轮蜗杆是一种常见的传动装置,它能够实现大功率的传递和变速。
在设计和应用中,需要计算蜗轮蜗杆的传动比,这样才能确定驱动装置和被驱动装置之间的速度关系。
蜗轮蜗杆的传动比计算公式为:
传动比=蜗轮轴的周长÷蜗杆轴的周长
其中,蜗轮轴的周长指的是蜗轮每个齿的周长之和,而蜗杆轴的周长则是蜗杆每个螺旋线的周长之和。
这两个参数的计算需要根据具体的设计和制造要求进行。
通过计算传动比,可以有效地控制蜗轮蜗杆的转速和扭矩,以满足不同的工作需求。
同时,还可以利用传动比计算出驱动装置和被驱动装置之间的速比,从而实现更精准的传动控制。
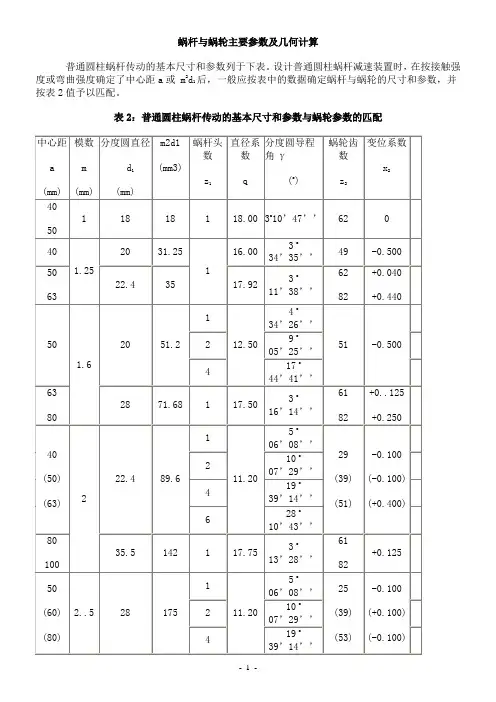
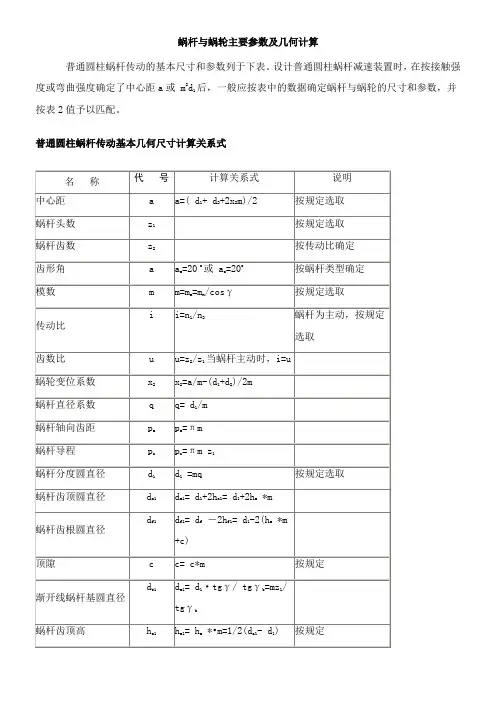
蜗杆与蜗轮主要参数及几何计算
普通圆柱蜗杆传动的基本尺寸和参数列于下表。
设计普通圆柱蜗杆减速装置时,在按接触强
后,一般应按表中的数据确定蜗杆与蜗轮的尺寸和参数,并度或弯曲强度确定了中心距a或 m2d
1
按表2值予以匹配。
表2:普通圆柱蜗杆传动的基本尺寸和参数与蜗轮参数的匹配
(200) (225) (250) 2
11 o
18’36’’
(41)
(47)
(52)
(-0.500)
(-0.375)
(+0.250) 4
21 o
48’05’’
6
30 o
57’50’’
注:1)本表中导程角γ小于3 o30’的圆柱蜗杆均为自锁蜗杆。
2)括号中的参数不适用于蜗杆头数z
1
=6时。
3)本表摘自GB10085-88。
蜗杆传动的几何尺寸及其计算公式见图1及表3表4。
图1 普通圆柱蜗杆传动的基本几何尺寸
图2:普通圆柱蜗杆传动
表3 普通圆柱蜗杆传动基本几何尺寸计算关系式
表4 蜗轮宽度B、顶圆直径d
e2及蜗杆齿宽b
1
的计算公式。

蜗轮蜗杆减速机传动原理详解蜗杆传动:蜗杆传动是在空间交错的两轴间传递运动和动力的一种传动,两轴线间的夹角可为任意值,常用的为90°。
蜗杆传动用于在交错轴间传递运动和动力。
1.简介蜗杆传动由蜗杆和蜗轮组成,一般蜗杆为主动件。
蜗杆和螺纹一样有右旋和左旋之分蜗杆传动,分别称为右旋蜗杆和左旋蜗杆。
蜗杆上只有一条螺旋线的称为单头蜗杆,即蜗杆转一周,涡轮转过一齿,若蜗杆上有两条螺旋线,就称为双头蜗杆,即蜗杆转一周,涡轮转过两齿。
2.特点(1)传动比大,结构紧凑。
蜗杆头数用Z1表示(一般Z1=1~4),蜗轮齿数用Z2表示。
从传动比公式I=Z2/Z1可以看出,当Z1=1,即蜗杆为单头,蜗杆须转Z2转蜗轮才转一转,因而可得到很大传动比,一般在动力传动中,取传动比I=10-80;在分度机构中,I可达1000。
这样大的传动比如用齿轮传动,则需要采取多级传动才行,所以蜗杆传动结构紧凑,体积小、重量轻。
(2)传动平稳,无噪音。
因为蜗杆齿是连续不间断的螺旋齿,它与蜗轮齿啮合时是连续不断的,蜗杆齿没有进入和退出啮合的过程,因此工作平稳,冲击、震动、噪音都比较小(3)具有自锁性。
蜗杆的螺旋升角很小时,蜗杆只能带动蜗轮传动,而蜗轮不能带动蜗杆转动。
(4)蜗杆传动效率低,一般认为蜗杆传动效率比齿轮传动低。
尤其是具有自锁性的蜗杆传动,其效率在0.5以下,一般效率只有0.7~0.9。
(5)发热量大,齿面容易磨损,成本高。
3.圆柱蜗杆圆柱蜗杆传动是蜗杆分度曲面为圆柱面的蜗杆传动。
蜗杆传动其中常用的有阿基米德圆柱蜗杆传动和圆弧齿圆柱蜗杆传动。
①阿基米德蜗杆的端面齿廓为阿基米德螺旋线,其轴面齿廓为直线。
阿基米德蜗杆可以在车床上用梯形车刀加工,所以制造简单,但难以磨削,故精度不高。
在阿基米德圆柱蜗杆传动中,蜗杆与蜗轮齿面的接触线与相对滑动速度之间的夹角很小,不易形成润滑油膜,故承载能力较低。
②弧齿圆柱蜗杆传动是一种蜗杆轴面(或法面)齿廓为凹圆弧和蜗轮齿廓为凸圆弧的蜗杆传动。
涡轮蜗杆的设计基本参数模数m、压力角、蜗杆直径系数q、导程角、蜗杆头数、蜗轮齿数、齿顶高系数(取1)及顶隙系数(取0.2)。
其中,模数m和压力角是指蜗杆轴面的模数和压力角,亦即蜗轮端面的模数和压力角,且均为标准值;蜗杆直径系数q为蜗杆分度圆直径与其模数m的比值。
编辑本段分类蜗轮蜗杆大致有这些系列: 1、WH系列蜗轮蜗杆减速机:WHT/WHX/WHS/WHC 2、CW系列蜗轮蜗杆减速机:CWU/CWS/CWO 3、WP系列蜗轮蜗杆减速机:WPA/WPS/WPW/WPE/WPZ/WPD编辑本段蜗轮蜗杆正确啮合的条件1.中间平面内蜗杆与蜗轮的模数和压力角分别相等,即蜗轮的端面模数等于蜗杆的轴面模数且为标准值;蜗轮的端面压力角应等于蜗杆的轴面压力角且为标准值,即 ==m ,==2.当蜗轮蜗杆的交错角为时,还需保证,而且蜗轮与蜗杆螺旋蜗轮蜗杆线旋向必须相同。
四、几何尺寸计算与圆柱齿轮基本相同,需注意的几个问题 1.蜗杆导程角()是蜗杆分度圆柱上螺旋线的切线与蜗杆端面之间的夹角,与螺杆螺旋角的关系为,蜗轮的螺旋角,大则传动效率高,当小于啮合齿间当量摩擦角时,机构自锁。
2.引入蜗杆直径系数q是为了限制蜗轮滚刀的数目,使蜗杆分度圆直径进行了标准化m一定时,q大则大,蜗杆轴的刚度及强度相应增大;一定时,q小则导程角增大,传动效率相应提高。
3.蜗杆头数推荐值为1、2、4、6,当取小值时,其传动比大,且具有自锁性;当取大值时,传动效率高。
与圆柱齿轮传动不同,蜗杆蜗轮机构传动比不等于,而是,蜗杆蜗轮机构的中心距不等于,而是。
4.蜗杆蜗轮传动中蜗轮转向的判定方法,可根据啮合点K处方向、方向(平行于螺旋线的切线)及应垂直于蜗轮轴线画速度矢量三角形来判定;也可用“右旋蜗杆左手握,左旋蜗杆右手握,四指拇指”来判定。
编辑本段蜗轮及蜗杆机构的特点1.可以得到很大的传动比,比交错轴斜齿轮机构紧凑2.两轮啮合齿面间为线接触,其承载能力大大高于交错轴斜齿轮机构3.蜗杆传动相当于螺旋传动,为多齿啮合传动,故传动平稳、噪音很小4.具有自锁性。
蜗轮蜗杆传动蜗轮蜗杆传动用于两轴交叉成90度,但彼此既不平行又不相交的情况下,通常在蜗轮传动中,蜗杆是主动件,而蜗轮是被动件。
蜗轮蜗杆传动有如下特点:1)结构紧凑、并能获得很大的传动比,一般传动比为7-80。
2) 工作平稳无噪音3) 传动功率范围大4)可以自锁5)传动效率低,蜗轮常需用有色金属制造。
蜗杆的螺旋有单头与多头之分。
传动比的计算如下:I=n1/n2=z/Kn1-蜗杆的转速 n2-蜗轮的转速 K-蜗杆头数 Z-蜗轮的齿数蜗轮及蜗杆机构一、用途:蜗轮蜗杆机构常用来传递两交错轴之间的运动和动力。
蜗轮与蜗杆在其中间平面内相当於齿轮与齿条,蜗杆又与螺杆形状相似。
二、基本参数:模数m、压力角、蜗杆直径系数q、导程角、蜗杆头数、蜗轮齿数、齿顶高系数(取1)及顶隙系数(取0.2)。
其中,模数m和压力角是指蜗杆轴面的模数和压力角,亦即蜗轮轴面的模数和压力角,且均为标准值;蜗杆直径系数q为蜗杆分度圆直径与其模数m的比值,三、蜗轮蜗杆正确啮合的条件1 中间平面内蜗杆与蜗轮的模数和压力角分别相等,即蜗轮的端面模数等於蜗杆的轴面模数且为标准值;蜗轮的端面压力角应等於蜗杆的轴面压力角且为标准值,即==m ,==2 当蜗轮蜗杆的交错角为时,还需保证,而且蜗轮与蜗杆螺旋线旋向必须相同。
四、几何尺寸计算与圆柱齿轮基本相同,需注意的几个问题是:蜗杆导程角()是蜗杆分度圆柱上螺旋线的切线与蜗杆端面之间的夹角,与螺杆螺旋角的关系为,蜗轮的螺旋角,大则传动效率高,当小於啮合齿间当量摩擦角时,机构自锁。
引入蜗杆直径系数q是为了限制蜗轮滚刀的数目,使蜗杆分度圆直径进行了标准化m一定时,q大则大,蜗杆轴的刚度及强度相应增大;一定时,q小则导程角增大,传动效率相应提高。
蜗杆头数推荐值为1、2、4、6,当取小值时,其传动比大,且具有自锁性;当取大值时,传动效率高。
与圆柱齿轮传动不同,蜗杆蜗轮机构传动比不等於,而是,蜗杆蜗轮机构的中心距不等於,而是。