航海仪器教学课件——绪论
- 格式:pdf
- 大小:317.28 KB
- 文档页数:9
第一章AIS第一节绪论AIS:Shipborne Atomatic Identification System(船载自动识别系统)VTS:Vessel Traffic Services System(港口)船舶交通管理系统。
船舶交通管理系统VTS是主管机关为了增进船舶交通安全以及保护环境所建立的一种设施。
其主要功能是收集水域内船舶交通有关信息,对收集到的信息进行处理,实现对水域内船舶进行监视、咨询服务及交通组织管理。
增进船舶航行安全,提高航运效率。
VTS作为岸基交通管理系统,离不开交通监视及船舶运动等大量信息的搜集,而雷达则是完成这一任务的技术手段之一,雷达是VTS的重要组成部分,传统的VTS系统是以岸基雷达为基础建立的,有很多缺点,如无法进行目标识别、提供的信息量小、目标位置精度和更新率低及无法自动进行船岸信息交换等。
AIS的出现,将给VTS系统带来重大的变革,AIS能提供船舶间和船岸间计算机数据链路的动态连接,为海上信息交换提供新的平台,一、AIS的产生随着世界船舶数量的不断增加以及船舶向大型化和高速化方向的不断发展,世界重要水道越来越拥挤,海损事故频繁发生,给航行安全和海洋环境造成了巨大的威胁。
为了加强海上交通管制、海洋污染监视和保证船舶航行安全,船舶间以及船岸间的信息交换与日俱增,船舶识别也备受重视。
在1995年IMO 的NA V41会议上,瑞典和芬兰联合首次提出了“将自组织时分多址技术应用于船舶间和船岸间的海上转发器系统的建议草案”的提案。
该转发器曾被称为4S(Ship-Ship,Ship-Shore)转发器,它利用了由瑞典民航局提出的新概念GP&C(全球定位与通信)和新技术STDMA(自组织时分多址接入)。
GP&C的特征是利用VHF无线数据链路和自组织时分多址接人技术实现航空、航海以及陆路运输领域的导航、识别、监视、状态报告和通信。
以GP&C概念构成的监视系统与当今的雷达系统相比具有信息量大、可靠性高、功能多、经济性好、作用范围广和易于组网等优点,具有广泛的应用前景。
航海仪器课程设计一、课程情况1.1 课程背景航海仪器是航海专业学生必修的一门课程,也是一门非常重要的课程。
在这门课程中,学生需要学习和掌握各种常用的航海仪器及其使用方法,这不仅能够提高学生的理论水平,同时还能提高其实践技能。
1.2 课程目标本课程的主要目标是帮助学生全面了解各种常用航海仪器的基本原理、结构、使用方法和注意事项,掌握其使用技能,提高学生的综合素质和实践能力。
1.3 课程内容本课程主要包括以下内容:•航海仪器基本原理•舵机和自动驾驶仪•船速测定仪•水文仪器•指南针和陀螺仪•船舶通信和气象设备二、教学方法本课程采用混合式教学方法,主要包括以下教学方式:2.1 理论讲授通过课堂讲解、PPT演示等方式,对各种航海仪器的基本原理、结构、工作原理、使用方法和注意事项进行详细阐述,以此提高学生的理论水平。
2.2 案例分析通过分析一些真实的航行事故案例,让学生理解航海仪器在实际航行中的重要性和使用方法,提高学生的实践能力,并使学生能够更好地将理论知识应用到实践中。
2.3 实践操作通过实验和实际操作,让学生亲自操作各种航海仪器,熟练掌握其使用方法,并提高学生的实践技能。
三、课程设计3.1 整体设计本课程的设计以实践为主、辅以理论的教学方法,注重学生的实际操作和探究能力,以激发学生的学习兴趣,提高其学习效果和实践能力。
3.2 单元设计本课程按照航海仪器的类型进行教学,每个单元均包含以下设计:3.2.1 引入通过引入一些航海事故案例,让学生认识到航海仪器在实际航行中的重要性和使用方法。
3.2.2 理论讲解对于各种航海仪器的工作原理、使用方法和注意事项进行详细的讲解,以帮助学生掌握理论知识。
3.2.3 整机分析将各种航海仪器的组成部分和工作原理进行系统的分析,以帮助学生深入理解仪器的结构及其在航行中的应用。
3.2.4 操作实验通过实验操作,让学生亲身体验仪器的使用方法和注意事项,熟练掌握仪器的操作技巧,并发现仪器使用中的问题和解决方法。
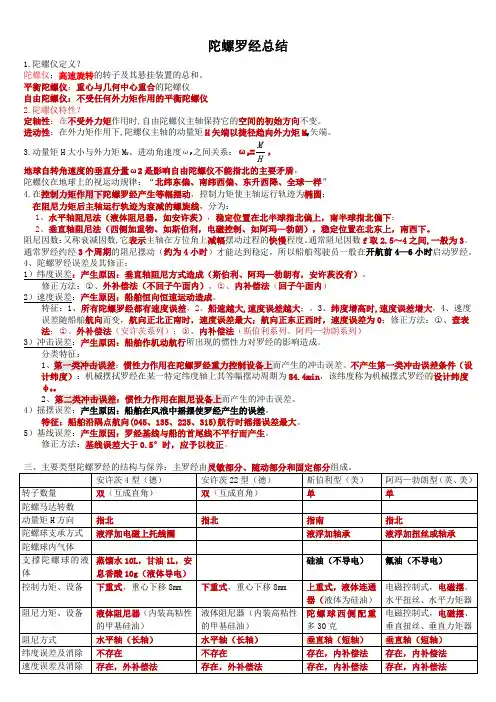
陀螺罗经总结1.陀螺仪定义?陀螺仪:高速旋转的转子及其悬挂装置的总和。
平衡陀螺仪:重心与几何中心重合的陀螺仪自由陀螺仪:不受任何外力矩作用的平衡陀螺仪 2.陀螺仪特性?定轴性:在不受外力矩作用时,自由陀螺仪主轴保持它的空间的初始方向不变。
进动性:在外力矩作用下,陀螺仪主轴的动量矩H 矢端以捷径趋向外力矩M Y 矢端。
3.动量矩H 大小与外力矩M Y 、进动角速度ωP 之间关系:ωP =, 地球自转角速度的垂直分量ω2是影响自由陀螺仪不能指北的主要矛盾。
陀螺仪在地球上的视运动规律:“北纬东偏、南纬西偏、东升西降、全球一样” 4.在控制力矩作用下陀螺罗经产生等幅摆动,控制力矩使主轴运行轨迹为椭圆; 在阻尼力矩后主轴运行轨迹为衰减的螺旋线,分为:1、水平轴阻尼法(液体阻尼器,如安许茨),稳定位置在北半球指北偏上,南半球指北偏下;2、垂直轴阻尼法(西侧加重物、如斯伯利,电磁控制、如阿玛—勃朗),稳定位置在北东上,南西下。
阻尼因数:又称衰减因数,它表示主轴在方位角上减幅摆动过程的快慢程度。
通常阻尼因数f 取2.5~4之间,一般为3。
通常罗经约经3个周期的阻尼摆动(约为4小时)才能达到稳定,所以船舶驾驶员一般在开航前4—6小时启动罗经。
4、陀螺罗经误差及其修正:1)纬度误差:产生原因:垂直轴阻尼方式造成(斯伯利、阿玛—勃朗有,安许茨没有)。
修正方法:○1、外补偿法(不回子午面内),○2、内补偿法(回子午面内) 2)速度误差:产生原因:船舶恒向恒速运动造成。
特征:1、所有陀螺罗经都有速度误差,2、船速越大,速度误差越大;。
3、纬度增高时,速度误差增大,4、速度误差随船舶航向而变,航向正北正南时,速度误差最大;航向正东正西时,速度误差为0;修正方法:○1、查表法;○2、外补偿法(安许茨系列);○3、内补偿法(斯伯利系列、阿玛—勃朗系列) 3)冲击误差:产生原因:船舶作机动航行所出现的惯性力对罗经的影响造成。
《航海仪器》实验指导书叶进、马文耀编广东海洋大学航海学院二00七年五月目录实验一陀螺罗经的结构认识与正确使用 (1)实验二回声测深仪、船用计程仪的部件认识与正确使用 (11)实验三磁罗经的结构认识与性能检查 (16)实验四无线电导航仪的操作使用和定位 (18)实验五卫星导航仪的正确使用 (25)实验六船舶自动识别系统(AIS)认识与使用 (54)实验一陀螺罗经的结构认识与正确使用一、实验目的进一步明确各系列陀螺罗经的指北原理和航向指示方法。
掌握陀螺罗经的正确使用方法以及检查和调整的方法。
二、实验要求1.了解各种型号陀螺罗经的组成部件及各部件的作用,了解主罗经的结构和各部分作用。
2.掌握各种型号罗经的开、关机和正确使用方法;掌握各种型号罗经的日常检查和调整的方法,以及日常的保养维护。
3.学会支承液体配制。
4.熟悉陀螺罗经要做哪些性能检查和必要的调整及其方法。
三、实验设备及用具1.安许茨4型陀螺罗经1部。
2.斯伯利MK-37型陀螺罗经1部。
3.SPERRY NAVIGATOR MK-2型陀螺罗经1部4.阿玛-勃朗MK—10型陀螺罗经1部。
5.万用表,球垫(或三角架),螺丝刀,活扳手等。
6.量杯,酒精灯,玻璃棒,比重计,温度汁等。
7.少量蒸溜水、甘油、安息酸等。
四、实验内容与步骤安许茨4型陀螺罗经(Anschütz-4型)(一)结构认识1.总体结构及作用(1)主罗经:指示船舶航向。
(2)变流机或逆变器:将船电转换成罗经各部分所需要的电源(3)变压器箱或自动启动箱和报警装置:对罗经进行启动、关闭和临视其工作。
(4)分罗经接线箱及分罗经:复示主罗经航向示度。
(5)航向记录器:显示及记录船舶航向。
2.主罗经结构及作用主罗经结构由三大部分构成。
(1)灵敏部分(陀螺球):为一密封的球体,浸浮在随动球内的支承液体中。
起找北、指北的作用,是罗经的核心部件。
①陀螺球内的陀螺马达、阻尼器、灯形支架、电磁上托线圈等结构及安装方法;陀螺马达的供电及润滑方法。
第一篇航海学地文航海航海学是一门研究船舶如何安全、经济地从一个港口(地点)航行到另一港口(地点)的实用性学科。
航海学主要研究下列课题:1.拟定一条安全、经济的航线和制定一个切实可行的航行计划。
2.航迹推算,包括航迹绘算和航迹计算两种方法。
航迹推算是指根据船上最基本的航海仪器(罗经和计程仪)所指示的航向和航程,结合海区内的风流要素和船舶操纵要素,不借助外界物标或航标,从某一已知船位起,推算出具有一定精度的航迹和某一时刻的船位的方法。
它是驾驶员在任何情况下,求取任何时刻的船位的最基本的方法,也是陆标定位、天文定位和电子定位的基础。
3.测定船位(简称定位),包括陆标定位、天文定位和电子定位三种。
陆标定位是指观测海图上标有准确位置的,并可供目视或雷达观测的山头、岛屿、岬角、灯塔等显著的固定物标与本船的某一(某些)相对位置关系,如方位、距离和方位差等,从而在海图上确定本船船位的方法和过程。
陆标定位一般可分为方位定位、距离定位、方位距离定位和移线定位等。
天文定位是指在海上利用航海六分仪观测天体(太阳、月亮和部分星体)高度来确定船舶位置的一种定位方法。
电子定位是指利用船舶所装备的无线电定位系统的接收机来测定本船位置的一种定位方法。
目前,普遍使用的有GPS定位系统和罗兰C定位系统。
船舶航行中,要求航海人员尽一切可能随时确定本船的船位所在。
这样,才可能结合海图,了解船舶周围的航行条件,及时采取适当、有效的航行方法和必要的航行措施,确保船舶安全、经济地航行。
航迹推算和定位是船舶在海上确定船位的两类主要方法。
4.航行方法,研究在各种航海条件下的航行方法,如沿岸航行、狭水道航行和特殊条件下的航行等。
为了研究上述课题,航海学还必须包括航海学基础知识和航路资料等基本内容。
其中,航海学基础知识主要包括坐标、方向和距离,以及海图两大部分内容;航路资料主要包括:潮汐与潮流、航标与《航标表》和航海图书资料等内容。
第一章坐标、方向和距离第一节地球形状和地理坐标一、地球形状航海上船舶和物标的坐标、方向和距离等,都是建立在一定形状的地球表面的,要研究坐标、方向和距离等航海基本问题,必须首先对地球的形状和大小作一定的了解。
中文:航海仪器课程名称英文:Navigation Apparatus课程编号 1105300 学分/学时 3.5/60所属教研室航海教研室先修课程 高等数学、大学物理、理论力学、电路与电机、无线电技术等课程类型 专业课 考核方式 考试开课专业 航海技术专业教学目的和要求目的:本课程是航海技术专业的一门主干专业课。
其目的是使学生掌握正确使用航海仪器应具备的基本知识和技能,并通过国家海事局要求的《航海仪器的正确使用》评估项目和《航海学》考试。
要求:1、理解陀螺罗经和磁罗经的指北原理及其结构组成,掌握测定和校正仪器误差的方法,熟练掌握仪器的正确使用方法与保养工作。
2、掌握测深仪和计程仪的基本原理、正确使用方法与维护保养工作。
3、掌握罗兰C系统、GPS/DGPS卫星导航系统的组成、定位原理和定位精度,熟练掌握GPS 卫导仪和罗兰C接收机的正确使用方法。
4、掌握AIS系统的功能、组成与特点,并能正确使用AIS收发机。
5、了解VDR和组合导航系统的主要功能与特点等。
教学内容和基本要求(分章节)绪论第一章 陀螺罗经的指北原理第一节 陀螺仪及其特性第二节 陀螺仪在地球上的视运动第三节 变自由陀螺仪为陀螺罗经的方法第四节 摆式罗经的等幅摆动和减幅摆动第五节 电磁控制式罗经原理第六节 光纤陀螺罗经定向原理基本要求:正确理解陀螺罗经的指北原理。
本章重点:陀螺罗经的指北原理。
本章难点:陀螺罗经的指北原理。
教学内容及基本要求(分章节)第二章 陀螺罗经误差及其消除第一节 纬度误差第二节 速度误差第三节 冲击误差第四节 其它误差基本要求:掌握陀螺罗经的各种误差的定义、特点及其校正方法。
本章重点:陀螺罗经的各种误差的特点及其校正方法。
本章难点:陀螺罗经纬度误差、速度误差的原因分析。
第三章双转子陀螺罗经第一节 安许茨4型罗经概述、主罗经结构组成、使用与保养第二节 安许茨20型罗经第三节 北辰CMZ500型罗经基本要求:掌握安许茨罗经的主罗经结构组成及各主要部件的作用,能熟练使用安许茨4型陀螺罗经。