某温度控制系统的MATLAB仿真
- 格式:doc
- 大小:851.50 KB
- 文档页数:20
一、概述MATLAB是一个功能强大的数学计算软件,在工程领域中被广泛应用。
其中,PID控制是一种常见的控制策略,用于调节系统的稳定性和响应性能。
本文将介绍如何使用MATLAB进行温度PID控制实验,并提供相应的实验代码。
二、实验准备1. 实验器材:- 温度传感器- 加热器- 控制系统2. MATLAB环境:- 安装MATLAB软件- 配置相关工具箱(如Control System Toolbox)三、PID控制原理PID控制器是Proportional(比例)、Integral(积分)和Derivative(微分)三个控制环节的组合。
其控制原理如下:1. 比例环节:根据误差的大小,以一定比例调节输出2. 积分环节:根据误差的积分值,对输出进行修正3. 微分环节:根据误差的变化率,预测未来的趋势,进一步调节输出四、实验步骤1. 确定系统模型:- 使用MATLAB进行系统建模,得到温度控制系统的传递函数2. 设计PID控制器:- 通过MATLAB的控制系统工具箱进行PID控制器的设计3. 实验验证:- 利用实验器材进行温度控制实验,观察系统的响应情况4. 参数调整:- 根据实验结果,逐步调整PID参数,优化系统的控制效果五、实验代码示例以下是一个简单的MATLAB代码示例,用于实现温度PID控制器的设计和实验验证:```matlab温度控制系统建模s = tf('s');G = 1 / (s^2 + 2*s + 1);设计PID控制器Kp = 1.2;Ki = 0.8;Kd = 0.5;C = pid(Kp, Ki, Kd);控制系统闭环T = feedback(C*G,1);绘制系统阶跃响应曲线t = 0:0.01:10;step(T,t);```六、实验结果与分析经过实验验证,利用上述PID控制器设计,在温度控制系统中取得了良好的控制效果。
通过实时调整PID参数,可以有效地实现温度的快速稳定控制,同时确保系统的稳定性和抗干扰能力。

控制系统仿真课程大作业题目: 基于MATLAB的炉温控制系统的仿真院系名称:电气工程学院专业班级:自动F0904学生姓名:学号:指导教师:教师职称:讲师评语:成绩:任课教师:时间:在数字PID算法中,为了避免传统PID控制器算法中积分累积所造成的系统较大超调和不稳定,甚至是积分饱和,人们常常会使用积分分离PID算法加以改进。
本文又提出了变速积分PID算法,并以电锅炉温度控制系统为例,基于MATLAB 并运用仿真分析手段,对两种不同算法的控制效果进行了比较,得出了积分分离算法的上升时间tr较短,而变速积分算法的调节时间ts较短,最大超调量较小,振荡次数较少,在温度控制系统中变速积分优于积分分离的结论。
本文以加热炉控制系统为例提出了一种模糊控制方案, 介绍了模糊控制器的设计过程并很方便地利用SIMULINK 进行了仿真研究, 结果证明, 这种模糊控制系统具有良好的动态性能。
关键词:PID控制;积分分离;变速积分;MATLAB1 绪论 (4)2 系统描述 (4)2.1 系统过程 (4)2.2 系统的组成和基本工作原理 (5)2.3 对象模型的归纳 (6)3 PID控制及仿真 (6)3.1分分离PID控制算法 (7)3.2 变速积分PID控制算法 (7)4 基于两种控制算法的炉温控制系统仿真 (8)结论 (10)致谢 (10)参考文献 (11)1 绪论控制系统计算机仿真是应用现代科学手段对控制系统进行科学研究的十分重要的手段之一。
进入80年代以来, 几乎所有控制系统的高品质控制均离不开系统仿真研究。
通过仿真研究可以对照比较各种控制策略与方案, 优化并确定相关参数, 特别是对于新控制决策与算法的研究, 进行系统仿真更是必不可少的。
一般而言, 对控制系统进行计算机仿真首先应建立系统模型, 然后依据模型编制仿真程序, 充分利用计算机作为工具对其进行数值求解并将结果加以显示。
显然, 通常在仿真过程中, 十分耗费时间与精力的是编制和修改仿真程序。

《MATLAB与控制系统仿真》实验报告一、实验目的本实验旨在通过MATLAB软件进行控制系统的仿真,并通过仿真结果分析控制系统的性能。
二、实验器材1.计算机2.MATLAB软件三、实验内容1.搭建控制系统模型在MATLAB软件中,通过使用控制系统工具箱,我们可以搭建不同类型的控制系统模型。
本实验中我们选择了一个简单的比例控制系统模型。
2.设定输入信号我们需要为控制系统提供输入信号进行仿真。
在MATLAB中,我们可以使用信号工具箱来产生不同类型的信号。
本实验中,我们选择了一个阶跃信号作为输入信号。
3.运行仿真通过设置模型参数、输入信号以及仿真时间等相关参数后,我们可以运行仿真。
MATLAB会根据系统模型和输入信号产生输出信号,并显示在仿真界面上。
4.分析控制系统性能根据仿真结果,我们可以对控制系统的性能进行分析。
常见的性能指标包括系统的稳态误差、超调量、响应时间等。
四、实验步骤1. 打开MATLAB软件,并在命令窗口中输入“controlSystemDesigner”命令,打开控制系统工具箱。
2.在控制系统工具箱中选择比例控制器模型,并设置相应的增益参数。
3.在信号工具箱中选择阶跃信号,并设置相应的幅值和起始时间。
4.在仿真界面中设置仿真时间,并点击运行按钮,开始仿真。
5.根据仿真结果,分析控制系统的性能指标,并记录下相应的数值,并根据数值进行分析和讨论。
五、实验结果与分析根据运行仿真获得的结果,我们可以得到控制系统的输出信号曲线。
通过观察输出信号的稳态值、超调量、响应时间等性能指标,我们可以对控制系统的性能进行分析和评价。
六、实验总结通过本次实验,我们学习了如何使用MATLAB软件进行控制系统仿真,并提取控制系统的性能指标。
通过实验,我们可以更加直观地理解控制系统的工作原理,为控制系统设计和分析提供了重要的工具和思路。
七、实验心得通过本次实验,我深刻理解了控制系统仿真的重要性和必要性。
MATLAB软件提供了强大的仿真工具和功能,能够帮助我们更好地理解和分析控制系统的性能。
摘要MATLAB语言是一种十分有效的工具,能容易地解决在系统仿真及控制系统计算机辅助设计领域的教学与研究中遇到的问题,它可以将使用者从繁琐的底层编程中解放出来,把有限的宝贵时间更多地花在解决科学问题上。
MATLAB GUI 是MATLAB的人机交互界面。
由于GUI本身提供了windows基本控件的支持,并且具有良好的事件驱动机制,同时提供了MATLAB数学库的接口,所以GUI 对于控制系统仿真的平台设计显得十分合适。
GUI对于每个用户窗口生成.fig和.m 文件。
前者负责界面的设计信息,后者负责后台代码的设计。
本文所做的研究主要是基于MATLAB GUI平台,结合控制系统基础理论和MATLAB控制系统工具箱,实现了用于控制系统计算机辅助分析与设计的软件。
本软件主要功能:实现传递函数模型输入、状态方程模型输入、模型装换、控制系统稳定性分析、系统可观性可控性判断,绘制系统奈奎斯特图、波特图、根轨迹图以及零极点分布图。
在继续完善的基础上能够用于本科自动控制原理教程的教学实验和一般的科学研究。
关键词:控制系统;MATLAB GUI;计算机辅助设计AbstractMATLAB language is a very effective tool,and can be easily resolved in the system simulation and control system of teaching in the field of computer-aided design and research problems,it could be the bottom of the user from tedious programming liberate the limited spend more valuable time to solve scientific problems.The MATLAB GUI is the interactive interface.As the GUI itself provides the basic control windows support,and has a good mechanism for event-driven,while providing the MATLAB Math Library interface,the GUI for control system simulation platform for the design of it is suitable. GUI window generated for each user. Fig and.M file. The former is responsible for the design of the interface information,which is responsible for the design of the background code.Research done in this article is mainly based on MATLAB GUI platform,the basis of combination of control system theory and MATLAB Control System Toolbox,the realization of control systems for computer-aided analysis and design software. The main functions of the software: the realization of transfer function model input,the state equation model input,the model fitted for the control system stability analysis,system observability controllability judgments、rendering the system Nyquist diagram、Bode plots、root locus and Pole-zero distribution. While continuing to improve based on the principle of automatic control can be used for undergraduate teaching course experiments and scientific research in general.Key words:Control System;MATLAB GUI; Computer-assistant design目录第1章概述 (1)1.1 论文选题背景和意义 (1)1.2 计算机辅助分析与设计在控制系统仿真中的发展现状 (1)1.3 本文主要内容 (3)第2章控制系统与MATLAB语言 (4)2.1 控制系统理论基础 (4)2.2 MATLAB语言与控制系统工具箱 (5)第3章 MATLAB GUI简介及应用 (9)3.1 MATLAB GUI (9)3.2 软件设计步骤 (10)第4章仿真系统测试与演示 (16)4.1 控制系统的模型输入 (16)4.2 控制系统的稳定性分析 (19)4.3 控制系统可控可观性分析 (20)4.4 控制系统频率响应 (23)4.5 控制系统时域响应 (27)4.6 控制系统根轨迹绘制 (28)结论 (31)参考文献 (32)致谢 (33)第1章概述1.1 论文选题背景和意义自动控制原理是自动控制专业和自动化专业的主要课程之一,是研究自动控制技术的基础理论课,是必修的专业基础课程。
某温度控制系统的MATLAB仿真1. 简介温度控制是很多工业过程中的一个重要环节,能够保证工业生产过程的稳定性和产品质量。
本文将介绍一个基于MATLAB的温度控制系统的仿真,包括系统的建模和控制算法的实现。
2. 温度控制系统建模温度控制系统一般由一个加热元件和一个温度传感器组成。
加热元件通过对电流或电压的控制来控制温度,温度传感器用于测量当前温度的值。
本文以一个简化的一维加热系统为例进行仿真。
2.1 系统参数设置首先,我们需要设置温度控制系统的一些参数,包括加热元件的功率、温度传感器的灵敏度和环境温度等。
这些参数可以在MATLAB中定义,如下所示:P = 100; % 加热元件功率K = 0.5; % 温度传感器灵敏度T_ambient = 25; % 环境温度2.2 系统动力学建模接下来,我们需要建立温度控制系统的动力学模型。
假设加热元件和温度传感器之间存在一定的传热延迟,我们可以使用一阶惯性模型进行建模。
系统的状态方程可以表示为:T_dot = (P - K * (T - T_ambient)) / C其中,T_dot为温度的变化率,T为温度的值,C为系统的热容量。
根据系统的动力学特性,我们可以选择合适的参数来建立系统模型。
3. 控制算法设计在温度控制系统中,我们需要设计一个控制算法来将温度稳定在设定的目标温度附近。
常用的控制算法包括比例控制、比例积分控制和模糊控制等。
本文选取比例积分控制(PI控制)作为控制算法进行仿真。
3.1 PI控制器设计PI控制器由一个比例项和一个积分项组成,其输出可以表示为:u(t) = K_p * (e(t) + (1 / T_i) * \\int_{0}^{t} e(\\tau) d\\tau)其中,e(t)为温度误差,K_p为比例系数,T_i为积分时间常数。
比例系数和积分时间常数的选择是控制器设计中的关键。
3.2 控制律实现在MATLAB中,我们可以使用控制系统工具箱来实现PI控制器。
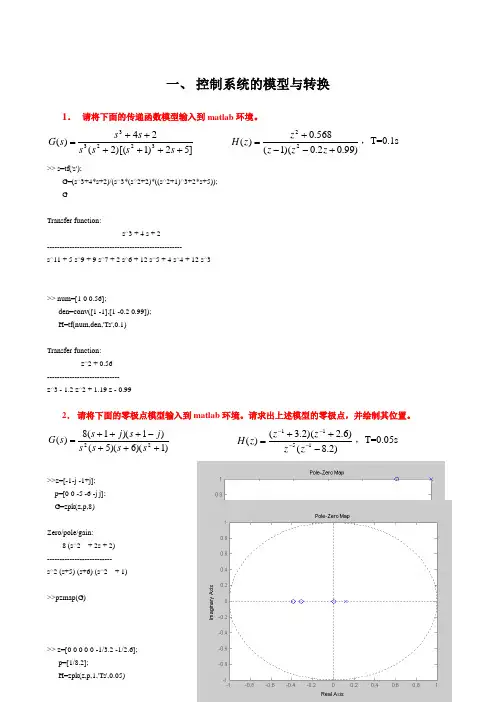
一、 控制系统的模型与转换1. 请将下面的传递函数模型输入到matlab 环境。
]52)1)[(2(24)(32233++++++=s s s s s s s G )99.02.0)(1(568.0)(22+--+=z z z z z H ,T=0.1s >> s=tf('s');G=(s^3+4*s+2)/(s^3*(s^2+2)*((s^2+1)^3+2*s+5)); GTransfer function:s^3 + 4 s + 2 ------------------------------------------------------ s^11 + 5 s^9 + 9 s^7 + 2 s^6 + 12 s^5 + 4 s^4 + 12 s^3>> num=[1 0 0.56];den=conv([1 -1],[1 -0.2 0.99]); H=tf(num,den,'Ts',0.1)Transfer function: z^2 + 0.56 ----------------------------- z^3 - 1.2 z^2 + 1.19 z - 0.992. 请将下面的零极点模型输入到matlab 环境。
请求出上述模型的零极点,并绘制其位置。
)1)(6)(5()1)(1(8)(22+++-+++=s s s s j s j s s G )2.8()6.2)(2.3()(1511-++=----z z z z z H ,T=0.05s>>z=[-1-j -1+j]; p=[0 0 -5 -6 -j j];G=zpk(z,p,8)Zero/pole/gain: 8 (s^2 + 2s + 2) -------------------------- s^2 (s+5) (s+6) (s^2 + 1)>>pzmap(G)>> z=[0 0 0 0 0 -1/3.2 -1/2.6]; p=[1/8.2];H=zpk(z,p,1,'Ts',0.05)Zero/pole/gain:z^5 (z+0.3125) (z+0.3846) ------------------------- (z-0.122)Sampling time: 0.05>>pzmap (H )二、 线性系统分析1. 请分析下面传递函数模型的稳定性。
MATLAB控制系统与仿真课程设计报告院(系):电气与控制工程学院专业班级:测控技术与仪器1301班姓名:吴凯学号:1306070127指导教师:杨洁昝宏洋基于MATLAB的PID恒温控制器本论文以温度控制系统为研究对象设计一个PID控制器。
PID控制是迄今为止最通用的控制方法,大多数反馈回路用该方法或其较小的变形来控制。
PID控制器(亦称调节器)及其改进型因此成为工业过程控制中最常见的控制器 (至今在全世界过程控制中用的84%仍是纯PID调节器,若改进型包含在内则超过90%)。
在PID控制器的设计中,参数整定是最为重要的,随着计算机技术的迅速发展,对PID参数的整定大多借助于一些先进的软件,例如目前得到广泛应用的MATLAB仿真系统。
本设计就是借助此软件主要运用Relay-feedback 法,线上综合法和系统辨识法来研究PID控制器的设计方法,设计一个温控系统的PID控制器,并通过MATLAB中的虚拟示波器观察系统完善后在阶跃信号下的输出波形。
关键词:PID参数整定;PID控制器;MATLAB仿真。
Design of PID Controller based on MATLABAbstractThis paper regards temperature control system as the research object to design a pid controller. Pid control is the most common control method up until now; the great majority feedback loop is controlled by this method or its small deformation. Pid controller (claim regulator also) and its second generation so become the most common controllers in the industry process control (so far, about 84% of the controller being used is the pure pid controller, it’ll exceed 90% if the second generation included). Pid parameter setting is most important in pid controller designing, and with the rapid development of the computer technology, it mostly recurs to some advanced software, for example, mat lab simulation software widely used now. this design is to apply that soft mainly use Relay feedback law and synthetic method on the line to study pid controller design method, design a pid controller of temperature control system and observe the output waveform while input step signal through virtual oscilloscope after system completed.Keywords: PID parameter setting ;PID controller;MATLAB simulation。
第11期2020年6月No.11June,2020电阻炉是热处理工艺过程中应用最广、数量最多的电加热设备。
随着控制技术日新月异的发展,对电阻炉温度控制的要求也就越来越高。
电阻炉是利用电流通过电热体元件将电能转化为热能来加热或熔化工件和物料的热加工设备,其温度控制具有单向性、大惯性、大滞后等复杂特点,主要分为升温、保温和降温3个部分,其中,升温、保温依赖电阻丝加热完成,而降温则主要依靠自然环境进行冷却。
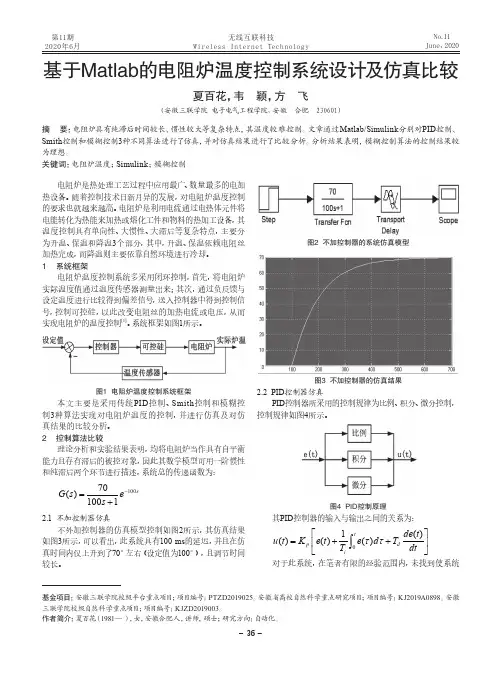
1 系统框架电阻炉温度控制系统多采用闭环控制,首先,将电阻炉实际温度值通过温度传感器测量出来;其次,通过负反馈与设定温度进行比较得到偏差信号,送入控制器中得到控制信号,控制可控硅,以此改变电阻丝的加热电流或电压,从而实现电阻炉的温度控制[1]。
系统框架如图1所示。
图1 电阻炉温度控制系统框架本文主要是采用传统PID控制、Smith控制和模糊控制3种算法实现对电阻炉温度的控制,并进行仿真及对仿真结果的比较分析。
2 控制算法比较理论分析和实验结果表明,均将电阻炉当作具有自平衡能力且存有滞后的被控对象,因此其数学模型可用一阶惯性和纯滞后两个环节进行描述,系统总的传递函数为:10070()1001sG s es−=+2.1 不加控制器仿真不外加控制器的仿真模型控制如图2所示,其仿真结果如图3所示,可以看出,此系统具有100 ms的延迟,并且在仿真时间内仅上升到了70°左右(设定值为100°),且调节时间较长。
图2 不加控制器的系统仿真模型图3 不加控制器的仿真结果2.2 PID控制器仿真PID控制器所采用的控制规律为比例、积分、微分控制,控制规律如图4所示。
图4 PID控制原理其PID控制器的输入与输出之间的关系为:1()()()()tp dide tu t K e t e d TT dtττ=++∫对于此系统,在笔者有限的经验范围内,未找到使系统基金项目:安徽三联学院校级平台重点项目;项目编号:PTZD2019025。
基于MATLAB的自动控制系统仿真毕业设计自动控制系统是一种可以自动调节和控制系统运行的系统。
对于自动控制系统的设计和优化,仿真是一种非常重要的方法。
基于MATLAB的自动控制系统仿真毕业设计可以帮助学生深入理解自动控制系统的原理和应用,并进行实际应用的实验和研究。
在毕业设计中,学生可以选择一个具体的自动控制系统,例如温度控制系统、位置控制系统、速度控制系统等。
然后,根据该系统的特点和要求,使用MATLAB软件进行仿真分析。
首先,学生可以利用MATLAB编写控制系统的数学模型。
通过了解和运用控制系统的原理和方法,学生可以将系统的输入信号、输出信号和控制信号之间的关系建立数学模型。
通过数学模型,可以进行系统的仿真分析和优化设计。
接下来,学生可以使用MATLAB的控制系统工具箱进行系统的仿真和分析。
控制系统工具箱提供了各种控制系统设计和分析的函数,如传递函数的建模、闭环系统的建模、系统的稳定性分析、频域分析等。
学生可以利用这些函数进行系统的仿真和分析,了解系统在不同输入和参数条件下的响应和性能。
在仿真过程中,学生可以尝试不同的控制算法和参数,观察系统响应的改变和性能的优劣。
例如,学生可以尝试不同的比例积分微分(PID)控制算法和参数,比较系统的稳定性、超调量和响应速度等指标。
通过不断的尝试和优化,学生可以得到系统的最佳控制算法和参数设定。
此外,学生还可以利用MATLAB的仿真工具进行系统的可视化展示。
通过绘制系统的输入信号、输出信号和控制信号的图形,学生可以直观地观察和分析系统的动态响应。
这样的可视化展示可以帮助学生更好地理解和分析系统的特性和性能。
最后,学生应该进行仿真结果的分析和评估。
通过对仿真结果的分析和评估,学生可以判断系统的性能是否满足设计要求,并提出改进的建议和方案。
总而言之,基于MATLAB的自动控制系统仿真毕业设计可以帮助学生深入理解自动控制系统的原理和应用,并进行实际应用的实验和研究。
控制系统仿真课程大作业题目: 基于MATLAB的炉温控制系统的仿真院系名称:电气工程学院专业班级:自动F0904学生姓名:学号:指导教师:教师职称:讲师评语:成绩:任课教师:时间:在数字PID算法中,为了避免传统PID控制器算法中积分累积所造成的系统较大超调和不稳定,甚至是积分饱和,人们常常会使用积分分离PID算法加以改进。
本文又提出了变速积分PID算法,并以电锅炉温度控制系统为例,基于MATLAB 并运用仿真分析手段,对两种不同算法的控制效果进行了比较,得出了积分分离算法的上升时间tr较短,而变速积分算法的调节时间ts较短,最大超调量较小,振荡次数较少,在温度控制系统中变速积分优于积分分离的结论。
本文以加热炉控制系统为例提出了一种模糊控制方案, 介绍了模糊控制器的设计过程并很方便地利用SIMULINK 进行了仿真研究, 结果证明, 这种模糊控制系统具有良好的动态性能。
关键词:PID控制;积分分离;变速积分;MATLAB1 绪论 (4)2 系统描述 (4)2.1 系统过程 (4)2.2 系统的组成和基本工作原理 (5)2.3 对象模型的归纳 (6)3 PID控制及仿真 (6)3.1分分离PID控制算法 (7)3.2 变速积分PID控制算法 (7)4 基于两种控制算法的炉温控制系统仿真 (8)结论 (10)致谢 (10)参考文献 (11)1 绪论控制系统计算机仿真是应用现代科学手段对控制系统进行科学研究的十分重要的手段之一。
进入80年代以来, 几乎所有控制系统的高品质控制均离不开系统仿真研究。
通过仿真研究可以对照比较各种控制策略与方案, 优化并确定相关参数, 特别是对于新控制决策与算法的研究, 进行系统仿真更是必不可少的。
一般而言, 对控制系统进行计算机仿真首先应建立系统模型, 然后依据模型编制仿真程序, 充分利用计算机作为工具对其进行数值求解并将结果加以显示。
显然, 通常在仿真过程中, 十分耗费时间与精力的是编制和修改仿真程序。
换热器作为一种标准工艺设备已经被广泛应用于动力工程领域和其他过程工业部门。
以工业上常用的列管式换热器为例,热流体和冷流体通过对流热传导达到换热的目的,从而使换热器物料出口温度满足工业生产的需求。
但是,由于换热系统这种被控对象具有纯滞后、大惯性、参数时变的非线性特点,传统的PID控制往往不能满足其静态、动态特性的要求。
控制方式的单一性及目前制造工艺的限制,使换热器普遍存在控制效果差,换热效率低的现象,造成能源的浪费。
如何提高换热器的控制效果,提高换热效率,对于缓解我国能源紧张的状况,具有长远的意义。
本课题是针对换热器实验设备温度控制的改进提出的。
设计中首先通过对现阶段换热器出口温度控制的特点进行分析,从而发现了制约控制效果进一步提高的瓶颈,为下一步改善换热器的控制效果提供了理论依据。
然后根据换热系统组成、控制流程的特点对换热器温度控制系统建立数学模型。
再根据所建立的数学模型,联系换热器温度控制的特点,给出了相应的控制策略,即带Smith预估补偿的模糊串级控制方案。
主回路采用Smith预估补偿的模糊控制算法,副回路采用模糊PID控制算法,并在理论上验证了其可行性。
最后用MATLAB7.0/SIMULINK工具箱进行换热器出口温度的控制仿真,并对仿真结果进行分析,说明所设计的控制算法及方案的优越性。
关键词:换热器温度控制;PID控制;模糊控制;仿真The heat exchanger based on MATLAB simulation of temperaturecontrolHeat exchanger as a standard process equipment has been widely used in the field of power engineering and other process industries. Commonly used in industrial heat exchanger tube as an example, the hot fluid and cold fluid heat transfer through convection heat transfer to achieve the purpose, so that heat exchanger outlet temperature materials to meet the needs of industrial production. However, as the heat exchange system that has a pure time delay plant, large inertia, the parameters of the nonlinear time-varying characteristics of the traditional PID control often can not meet the static and dynamic characteristics of the request. Control the uniformity and the current manufacturing process of the limit, so that the effect of heat exchanger to control the prevalence of poor, low heat transfer efficiency, resulting in waste of energy. How to improve the control of the effect of heat exchangers to improve heat transfer efficiency and ease the tense situation in our country's energy, with a long-term significance.This issue is heat exchanger for temperature control of laboratory equipment to improve the proposed. first of all , The design stage through the heat exchanger outlet temperature control characteristics of the analysis, which found that the effect of restricting the control to further improve the bottleneck for further improving the control of the effect of heat exchanger provides a theoretical basis. Heat exchange system according to the composition of the characteristics of control flow on the heat exchanger temperature control system mathematical model. Established in accordance with the mathematical model of contact heat exchanger temperature control characteristics of the corresponding control strategy, which Smith estimated compensation with fuzzy cascade control program. Smith estimated the main loop compensation for the use of fuzzy control algorithm, the Vice-loop fuzzy PID control algorithm, and in theory, to verify its feasibility. Toolbox MATLAB7.0/SIMULINK Finally, heat exchanger outlet temperature of the control simulation, and analysis of simulation results to illustrate the design of control algorithms and the advantages of the program.Key words: heat exchanger temperature control; PID control; fuzzy control; simulation目录摘要 (I)Abstract (II)第一章绪论 (1)1.1 引言 (1)1.2 选题的背景及意义 (1)1.3换热器的温度控制概述 (2)1.3.1 换热器简介 (2)1.3.2换热器运行控制的现状 (4)1.4课题的主要任务及意义 (5)第二章换热系统的数学模型 (6)2.1 换热器过程控制系统分析 (6)2.2 信号的检测及参数关系 (7)2.2.1 流量信号的检测 (7)2.2.2 温度信号的检测 (8)2.2.3 执行机构的输入输出关系 (8)2.3 换热器特性分析 (9)2.3.1换热器的静态特性分析 (9)2.3.2换热器的动态特性 (13)2.4离心泵控制模型 (16)2.4.1 系统组成概述 (16)2.4.2离心泵的动态特性 (17)第三章换热器温度控制系统分析及方案设计 (19)3.1 换热器温度控制系统分析 (19)3.2 控制模型的选择 (22)3.2.1 副回路控制模型的选择 (22)3.2.2主回路控制模型的选择 (23)第四章换热器控制系统控制算法 (24)4.1 模糊控制理论 (24)4.1.1 模糊控制概述 (24)4.1.2 模糊控制的原理 (25)4.2基本模糊控制器的设计 (26)4.2.1 模糊化过程 (27)4.2.2 模糊化方法 (28)4.2.3 建立模糊控制器的控制规则 (30)4.2.4 模糊推理与模糊判决 (31)4.3 模糊PID控制算法实现 (32)4.3.1 PID控制原理及模糊PID控制原理图 (32)4.3.2模糊参数自整定原则 (34)4.3.3 各变量隶属度函数的确定 (34)4.3.4建立模糊规则表 (35)4.3.5 模糊PID控制器的MATLAB实现 (37)4.4 Smith—Fuzzy串级控制算法的实现 (41)4.4.1 Smith预估补偿的原理 (41)4.4.2 Smith预估补偿的实现 (43)4.4.3换热器出口温度Smith—Fuzzy控制实现 (43)第五章换热器温度控制系统仿真及结果分析 (46)5.1仿真软件简介 (46)5.2基于换热器出口水温控制系统的仿真 (48)5.3换热器温度控制系统仿真分析 (52)第六章结束语 (54)参考文献 (55)致谢 (57)第一章绪论1.1 引言换热器是一种用来进行热量交换的工艺设备,在工业生产中应用极为广泛。
控制系统pid参数整定方法的matlab仿真
控制系统PID参数整定方法的MATLAB仿真,可以分为以下几个步骤:
1. 建立模型。
在MATLAB中建立你要进行PID参数整定的模型,比如电机速度控制系统或温度控制系统。
2. 设计控制器。
根据建立的模型,设计出对应的PID控制器,并将其加入到系统中。
3. 确定初始参数。
在进行PID参数整定前,需要确定PID控制器的初始参数。
通常可以选择Ziegler-Nichols方法、Chien-Hrones-Reswick方法等经典的PID参数整定法则来确定初始参数。
4. 仿真模拟。
使用MATLAB中的仿真工具,对整定后的PID控制器进行仿真模拟,并记录下系统的响应曲线和各项性能指标。
5. 调整参数。
根据仿真结果,对PID控制器的参数进行适当的调整,以达到更理想的控制效果。
6. 再次仿真模拟。
调整完参数后,再次使用MATLAB中的仿真工具,对整定后的PID控制器进行仿真模拟,并比较其与上一次仿真的差异,以确认调整是否合理。
7. 实现控制。
最后,将优化后的PID控制器应用到实际控制系统中,进行控制。
总的来说,PID参数整定是一个相对复杂的过程,需要根据具体情况选择合适的方法和工具。
MATLAB作为一种强大的数学计算软件,可以提供丰富的工具和函数,方便进行控制系统的建模和仿
真,也可以帮助我们更好地进行PID参数整定。
淮海工学院课程设计报告书课程名称:综合课程设计系(院):电子工程学院学期:2011~2012 第一学期专业班级:电气082班姓名:胡韬学号:030861217评语:成绩:签名:日期:对温控系统进行建模及MATLAB仿真1单片机在炉温控制系统中的运用温度是工业对象中一个主要的被控参数,它是一种常见的过程变量,因为它直接影响燃烧、化学反应、发酵、烘烤、煅烧、蒸馏、浓度、挤压成形,结晶以及空气流动等物理和化学过程。
温度控制不好就可能引起生产安全,产品质量和产量等一系列问题。
温度控制是许多设备的重要的构成部分,它的功能是将温度控制在所需要的温度范围内,以利于进行工件的加工与处理。
一直以来,人们采用了各种方法来进行温度控制,都没有取得很好的控制效果。
如今,随着以微机为核心的温度控制技术不断发展,用微机取代常规控制已成必然,因为它确保了生产过程的正常进行,提高了产品的数量与质量,减轻了工人的劳动强度以及节约了能源,并且能够使加热对象的温度按照某种指定规律变化。
实践证明,用于工业生产中的炉温控制的微机控制系统具有高精度、功能强、经济性好的特点,无论在提高产品质量还是产品数量,节约能源,还是改善劳动条件等方面都显示出无比的优越性。
单片机具有集成度高,运算快速快,体积小、运行可靠,价值低廉,因此在过程控制、数据采集、机电一体化、智能化仪表、家用电器以及网络技术等方面得到广泛应用,本文主要介绍单片机在炉温控制中的应用。
本设计以89C51单片机为核心控制器件,以ADC0809作为A/D转换器件,采用闭环直接数字控制算法,通过控制可控硅来控制热电阻,进而控制电炉温度,最终设计了一个满足要求的电阻炉微型计算机温度控制系统。
1、1系统的基本工作原理整个炉温控制系统由两大部分组成。
一部分由计算机和A/D和D/A转换电路组成。
主要完成温度采集,PID运算,产生可控硅的触发脉冲。
另外一部分由传感器信号放大,同步脉冲形成,以及触发脉冲放大等组成。
基于Matlab的PID温控系统的设计与仿真摘要在Matlab6.5环境下,通过Matlab/Simulink提供的模块,对温度控制系统的PID控制器进行设计和仿真。
结果表明,基于Matlab的仿真研究,能够直观、简便、快捷地设计出性能优良的交流电弧炉温度系统控制器。
关键词温度系统数学模型;参数整定;传递函数在钢铁冶炼过程中,越来越多地使用交流电弧炉设备,温控系统的控制性能直接影响到钢铁的质量,所以炉温控制占据重要的位置。
PID控制是温控系统中一种典型的控制方式,是在温度控制中应用最广泛、最基本的一种控制方式。
随着科学发展,各行各业对温控精度要求越来越高,经典PID控制在某些场合已不能满足要求,因而智能PID控制的引入是精密温控系统的发展趋势。
为了改善电弧炉系统恒温控制质量差的现状,研制具有快速相应的、经济性好的、适合国情的恒温控制装置具有十分重要的意义。
1温控系统模型的建立在Matlab6.5环境下,通过Simulink提供的模块,对电弧炉温控系统的PID控制器进行设计和仿真。
由于常规PID控制器结构简单、鲁棒性强,被广泛应用于过程控制中。
开展数字PID控制的电弧炉控制系统模型使应用于生产实际的系统稳定性和安全性得到迅速改善。
1.1温控系统阶越响应曲线的获得在高校微机控制技术实验仪器上按以下步骤测得温度系统阶越响应曲线:1)给温度控制系统75%的控制量,即每个控制周期通过X0=255×75%=191个周波数,温度系统处于开环状态。
2)ATMEGA32L内部A/D每隔0.8s采样一次温度传感器输出的电压值,换算成实际温度值,再通过串口通讯将温度值送到电脑上保存。
使用通用串口调试助手“大傻串口调试软件-3.0AD”作为上位机接收数据并保存到文件“S曲线采集.txt”中。
3)在采集数据过程中,不时的将已经得到的数据通过“MicrosoftExcel”文档画图,查看温度曲线是否已经进入了稳态区;根据若曲线在一个较长时间里基本稳定在一个小范围值内即表明进入稳态区了,此时关闭系统。
温度控制系统一.温度控制系统概述:本设计是利用MATLAB软件仿真技术实现的温度控制系统演示动画。
水的温度以一个下限温度(本设计为27℃)起始,该系统启动,并对水进行加热,使其温度持续上升,直至上限温度(本设计为100℃),之后为使温度保持在60℃-100℃范围内,则该系统开始冷却,直至中间温度60℃,系统又开始对水加热至100摄氏度,再冷却至60摄氏度,如此循环,即可实现水温控制在60℃-100℃范围内保持不变。
分别有指示灯指示。
二.温度控制系统程序:hf=figure('name','温度控制系统','color',[.96 .96 .96]);%设置标题名字 axis([-1 1 -1 1]);axis('off');hold on;x1=[0.2 0.2 0.4 0.4];y1=[-0.46 -1 -1 -0.46];t=-0.46;%存储温度纵坐标k=1;k1=1;%k为运行标志位,当k=1时,运行;当k=0时,停止;k1为温度上下降标志位,当k1=1时,温度上升;当k1=0时,温度下降line([0.2;0.2],[1;-1],'color','k','linewidth',2); %温度区域左边line([0.2;0.4],[-1;-1],'color','k','linewidth',2);%温度区域下边line([0.4;0.4],[1;-1],'color','k','linewidth',2);%温度区域右边line([0.2;0.4],[1;1],'color','k','linewidth',2);%温度区域上边line([0.4;0.5],[1;1],'color','r','linewidth',2);%刻度标记100text(0.5,1,'100摄氏度','color','r');line([0.4;0.5],[0.2;0.2],'color','b','linewidth',2);%刻度标记60text(0.5,0.2,'60摄氏度','color','b');line([0.4;0.5],[-0.46;-0.46],'color','g','linewidth',2);%刻度标记27text(0.5,-0.46,'室温27摄氏度','color','g');pp=line([0.2;0.4],[-0.46;-0.46],'color','r','linewidth',3);Fun1=plot(-0.95,0.6,'color','k','marker','.','markersize',30);%加热显示text(-1,0.5,'加热');Fun2=plot(-0.5,0.6,'color','k','marker','.','markersize',30);%冷却显示text(-0.55,0.5,'冷却');Fun3=plot(-0.95,0.2,'color','k','marker','.','markersize',30);%电源开显示text(-1,0.1,'ON');Fun4=plot(-0.5,0.2,'color','r','marker','.','markersize',30);%电源关显示text(-0.53,0.1,'OFF');text(-0.9,0,'电源指示灯'); %停止按钮pushbutton1=uicontrol(hf,...'units','normalized',...'style','pushbutton',...'string','停止',...'backgroundcolor',[0.75 0.75 0.75],...'position',[0.1 0.3 0.1 0.1],...'callback','k=0;');%关闭按钮pushbutton2=uicontrol(hf,...'units','normalized',...'style','pushbutton',...'string','关闭',...'backgroundcolor',[0.75 0.75 0.75],... 'position',[0.3 0.3 0.1 0.1],...'callback','close');temp=patch(x1,y1,[0 1 1]); %初始温度while k==1 %产生温度上升、下降动画set(Fun4,'color','k');set(Fun3,'color','r');if k1==1 %温度上升set(Fun1,'color','r');set(Fun2,'color','k');for i=1:1600a=t+(1-t)/1600*i;y1=[a -1 -1 a];set(temp,'ydata',y1);set(pp,'ydata',[a,a]);drawnow;endt=a;k1=0;else if k1==0 %温度下降set(Fun1,'color','k');set(Fun2,'color','r');for i=1:1000a=t-(t-0.2)/1000;y1=[a -1 -1 a];set(temp,'ydata',y1);set(pp,'ydata',[a,a]);drawnow;endt=a;k1=1;endendendset(Fun1,'color','k'); %停止还原set(Fun2,'color','k');set(Fun3,'color','k');set(Fun4,'color','r');二.温度控制系统动画截图:1.开启系统,则系统以27℃的下限温度开始加热:电源指示灯和加热指示灯同时点亮:2.温度低于中间温度,系统处于加热状态:加热指示灯仍旧点亮3.温度高于中间温度,系统仍处于加热状态:4.当温度到达上限温度100℃,系统开始冷却:冷却指示灯点亮,加热指示灯熄灭。
课程设计报告题目某温度控制系统的MATLAB仿真(题目C)过程控制课程设计任务书题目C :某温度控制系统的MATLAB 仿真一、 系统概况:设某温度控制系统方块图如图:图中G c (s)、G v (s)、G o (s)、G m (s)、分别为调节器、执行器、过程对象及温度变送器的传递函数;,且电动温度变送器测量范围(量程)为50~100O C 、输出信号为4~20mA 。
G f (s)为干扰通道的传递函数。
二、系统参数二、 要求:1、分别建立仿真结构图,进行以下仿真,并求出主要性能指标:(1)控制器为比例控制,其比例度分别为δ=10%、20%、50%、100%、200%时,系统广义对象输出z(t)的过渡过程;(2)控制器为比例积分控制,其比例度δ=20%,积分时间分别为T I =1min 、3min 、5min 、10min 时,z(t)的过渡过程;0m v o0f o o =5min =2.5min =1.5(kg/min)/mA =5.4C/(kg/min) =0.8 C C T T K K K x(t)=80f(t)=10;;;;;给定值;阶跃扰动(3)控制器为比例积分微分控制,其比例度δ=10%,积分时间T I=5min,微分时间T D = 0.2min时,z(t)的过渡过程。
2、对以上仿真结果进行分析比对,得出结论。
3、撰写设计报告。
注:调节器比例带δ的说明比例控制规律的输出p(t)与输入偏差信号e(t)之间的关系为式中,K c叫作控制器的比例系数。
在过程控制仪表中,一般用比例度δ来表示比例控制作用的强弱。
比例度δ定义为式中,(z max-z min)为控制器输入信号的变化范围,即量程;(p max-p min)为控制器输出信号的变化范围。
=cp(t)K e(t) max min()=100%)max mine z zp(p-pδ-⨯这时δ 与K c 便互成倒数关系,即:但如果调节器的输入、输出不是相同性质的信号,则系数K ≠1,需要根据量程和输出信号范围进行计算。
例:某温度系统中,调节器为电动比例调节器,配用的电动变送器测量范围为40~150 O C ,输出为4~20mA ,若选用比例度δ =10%,问该比例调节器的比例系数K c 为多少?解:=100%c1K δ⨯max min max min =204= 1.450.115040c c p p 1K z z 1K δ-⨯--∴⨯=-仿真过程一,控制器为比例控制P对于比例控制器:其传递关系为:(t))(e K y p t =控制器的传递函数为:pt K G =)(纯比例控制仿真结构图如下:(1)当比例度为δ=10%2.350-1004-201.01--1minmax minmax =⨯=∴⨯=c c K Z Z P P K δ即仿真图中Kc 为3.2,给定值和阶跃扰动分别设置为80,10则有仿真得系统广义对象输出z(t)的过渡过程如图:其主要性能指标如下:上升时间tr=2.4min; 峰值时间tp=3.2min;最大超调量48.75%8080-119==pσ;过渡时间ts=10min;震荡次数N=3;稳态误差ss e=10OC (2)比例度为δ=20%1.650-1004-202.01=⨯=c K ,将仿真图中Kc 参数改为1.6即可,仿真得系统广义对象输出z(t)的过渡过程如下图:主要性能指标如下:上升时间tr=3min;峰值时间tp=4min ;最大超调量31.25%8080-105==p σ;过渡时间ts=10min;震荡次数N=2;稳态误差ss e =5OC(3)比例度为δ=50%0.6450-1004-205.01=⨯=c K ,将图1中K 参数改为0.64即可,仿真得系统广义对象输出z(t)的过渡过程如下图:主要性能指标如下:上升时间tr=4.2min; 峰值时间tp=5min ;最大超调量12.5%8080-90==p σ; 过渡时间ts=10min;震荡次数N=1; 稳态误差ss e =-5OC(4)比例度为δ=100%0.3250-1004-2011=⨯=c K ,将图1中K 参数改为0.32即可,仿真得系统广义对象输出z(t)的过渡过程如下图:由图可知比例度度为δ=100%时,最大值小于80,达不到系统要求的稳定范围(5)比例度为δ=200%0.1650-1004-2021=⨯=c K ,将图1中K 参数改为0.16即可,仿真得系统广义对象输出z(t)的过渡过程如下图:由图可知比例度度为δ=200%时,最大值同样小于80,达不到系统要求的稳定范围。
二,控制器为比例积分控制PI 其传递关系为:⎰+=t p t dt t e e K y 0I p )()(T K (t) 控制器的传递函数为:)11(S T K G I p s +=)( 建立比例积分仿真结构图如下:(1)比例度δ=20%,积分时间为T I=1min由比例环节可知,比例系数为1.6,仿真得系统广义对象输出z(t)的过渡过程如下图:由于系统为发散型,所以不稳定,各项指标没有意义(2)比例度δ=20%,积分时间为T I =3min把仿真图中PI 控制器改为S S 36.18.4+, 仿真得系统广义对象输出z(t)的过渡过程如下图:主要性能指标如下:上升时间tr=2.7min;峰值时间tp=4.2min ;最大超调量68.75%8080-135==p σ;过渡时间ts=10min;震荡次数N=2;稳态误差ss e =20OC(3)比例度δ=20%,积分时间为T I =5min把仿真图中PI 控制器改为S S 56.18+,仿真得系统广义对象输出z(t)的过渡过程如下图: 主要性能指标如下:上升时间tr=2.7min;峰值时间tp=4.2min ;最大超调量56.25%8080-125==p σ;过渡时间ts=10min;震荡次数N=2;稳态误差ss e =10OC(4) 比例度δ=20%,积分时间为T I =10min把仿真图中PI 控制器改为SS 106.116+,仿真得系统广义对象输出z(t)的过渡过程如下图:主要性能指标如下:上升时间tr=2.7min; 峰值时间tp=4.2min;最大超调量43.75%8080-115==pσ;过渡时间ts=10min;震荡次数N=2;稳态误差ss e=2OC三,控制器为比例积分微分控制PID其传递关系为:])(1)()([)(⎰++=tIdpt dtt eTdttdeTt eKy控制器地传递函数为:)11(STSTKGIdps++=)(已知要求为比例度δ=10%,积分时间TI=5min,微分时间TD = 0.2min,所以建立仿真结构图如图:仿真得系统广义对象输出z(t)的过渡过程如下图主要性能指标如下:上升时间tr=2.4min; 峰值时间tp=3.4min;最大超调量43.75%8080-115==pσ;过渡时间ts=10min;震荡次数N=2;稳态误差ss e=0OC分析结论(1)比例控制:由比例控制过程的仿真可知,当δ从10%,20%,50%,100%,200%变化过程中,Kc逐渐减小。
随着Kc的逐渐减小,系统的响应速度,超调量都减小,但是当Kc少于0.32以后,系统响应变慢,且系统达不到调节要求。
由此可知,比例系数Kc越大,系统响应越快,但是过大时会导致系统不稳定。
但是如果Kc 过小,也不能达到调节要求,系统响应慢,静态特性差。
(2)比例积分控制:从仿真的结果来看,随着积分时间的增加,积分的控制作用在减小,系统的稳定性在加强。
积分控制主要是消除静差,积分作用的强弱同时取决于积分时间的长短。
采用比例积分调节控制,可以实现误差调节。
(3)比例积分微分控制:由仿真过程可以看出,运用PID调节,不仅可以消除误差,由于微分环节的加入,还能够提高系统的稳定性,是一种比较理想的调节方式。
收获与体会通过本次课程设计,使我对比例控制,比例积分控制,以及比例积分微分控制(PID)三种系统控制手段有了一个更深的认识,从单它们一的控制作用,再到三者对比,使我基本理解了它们的控制规律,也认识到了它们各自的控制优势与不足。
同时我也熟悉了MATLAB运行环境,掌握了Simulink的仿真过程。
这次课程设计也使我学到了很多书本之外的东西。
在课设的过程中,通过查找资料及同学之间的探讨,使自己将理论知识上升到实践的高度。
最后,感谢老师在我们学习过程中无私的指导。
附录:参考文献[1] 邵裕森、戴先中:过程控制工程.机械工业,2000(5).[2] 鄢景华:自动控制原理.哈尔滨工业大学,2012(10).[3] 张普格、陈丽兰:控制系统CAD—基于MATLAB语言.机械工业,2010(8).。