平台式惯性导航系统原理及应用
- 格式:ppt
- 大小:4.08 MB
- 文档页数:56
惯性导航的工作原理及惯性导航系统分类
惯性导航系统(INS)是一种自主式的导航设备,能连续、实时地提供载体位置、姿态、速度等信息;特点是不依赖外界信息,不受气候条件和外部各种干扰因素。
惯性导航及控制系统最初主要为航空航天、地面及海上军事用户所应用,是现代国防系统的核心技术产品,被广泛应用于飞机、导弹、舰船、潜艇、坦克等国防领域。
随着成本的降低和需求的增长,惯性导航技术已扩展到大地测量、资源勘测、地球物理测量、海洋探测、铁路、隧道等商用领域,甚至在机器人、摄像机、儿童玩具中也被广泛应用。
不同领域使用惯性传感器的目的、方法大致相同,但对器件性能要求的侧重各不相同。
从精度方面来看,航天与航海领域对精度要求高,其连续工作时间也长;从系统寿命来看,卫星、空间站等航天器要求最高,因其发射升空后不可更换或维修;制导武器对系统寿命要求最短,但可能须要满足长时间战备的要求。
涉及到军事应用等领域,对可靠性要求较高。
惯性导航的工作原理
惯性导航系统是一种自主式的导航方法,它完全依靠载体上的设备自主地确定载体的航向、位置、姿态和速度等导航参数,而不需要借助外界任何的光、电、磁等信息。
惯性导航是一门涉及精密机械、计算机技术、微电子、光学、自动控制、材料等多种学科和领域的综合技术。
其基本工作原理是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度、角加速度,将它对时间进行一次积分,求得运动载体的速度、角速度,之后进行二次积分求得运动载体的位置信息,然后将其变换到导航坐标系,得到在导航坐标系中的速度、偏航角和位置信息等。
百度搜索“乐晴智库”,获得更多行业深度研究报告
惯性导航系统分类。
基于安全运行的船舶平台式惯性导航解析作者:罗幼果来源:《中国科技纵横》2012年第11期摘要:惯性导航系统是目前最为先进的导航技术之一,其中平台式惯性导航系统广泛的应用于我国的军事舰艇上。
本文通过对我国舰艇惯性导航技术的特点、发展历程、结构等方面的解析,探寻惯性导航技术的发展前景和方向。
关键词:舰艇平台式惯性导航陀螺仪加速度计惯性导航系统(Inertial Navigation System),是以牛顿力学定律为基础,利用惯性元件来测量载体本身的加速度,经过积分和计算后得到速度与方位,从而起到对载体导航定位的作用。
平台式惯性导航系统将惯性敏感元件安装在一个稳定平台上,以平台坐标系为基准,测量载体运动的参数信息的惯性导航系统,目前,我国的舰艇惯性导航系统是以具有精确度高、计算量小等优点的平台式惯性导航系统为主。
1、舰艇惯性导航技术特点简述舰艇惯性导航技术凸显出两个鲜明的特点,优点是它能够在不隔绝外界任何信息的情况下,实时的、不间断的、自主的计算并向舰艇提供关于位置、速度、方向等方面的参数信息,同时又不会将舰艇的暴露性信息反馈给外界。
缺点是它所计算出的参数信息在其原理上会存在误差,并且会随着时间的增长而增长。
舰艇惯性导航技术是为了配备的核潜艇而研制和发展的,其作用主要是为了满足长期在水下工作的潜艇的安全航行和导弹发射命中率所需的参数信息和舰艇的运动参数信息。
舰艇导航技术的不断进步既可以满足潜艇水下工作的隐蔽性要求,也能提高导弹的发射命中率。
2、我国的惯性导航技术的发展我国惯性技术的发展自上世纪60年代开始,至今已有50多年的历史,从最早的机械式陀螺自动驾驶仪发展到平台式惯性系统、捷联式惯性系统和惯性组合导航系统,从最初只应用于导弹发射技术到现在航海、航空以及航天等方面的应用,范围越来越广。
导航,顾名思义是指引导航行。
我国的惯性导航技术在舰艇上的应用开始于20世纪50年代,至今已经完成了传统的平台式惯性导航的早期发展阶段。
惯性导航技术发展与应用【摘要】阐述了惯性导航的基本原理,并通过简图来表示出原理的示意图。
举出了常见的导航系统.总结了世界范围内惯性导航的发展历程与发展趋势,其中重点介绍了国内导航的发展路程。
而后简洁叙述了惯性导航的应用。
【关键词】惯性导航;平台式惯性导航;捷联式惯性导航0.引言惯性导航系统利用惯性敏感元件在飞机、导弹、舰船、火箭载体内部测量载体相对惯性空间的线运动和角运动参数,在给定的运动初始条件下,根据牛顿运动定律,推算载体的瞬时速度和瞬时位置。
惯性导航涉及到控制技术、计算机技术、测试技术、精密机械工艺等多门应用技术学科,是现代高精尖技术的产物。
1.惯性导航的基本原理在这里我们假设船舶在海面的较小范围内航行,这样舰船的活动区域可近似看作是一平面,球面导航就可以化为平面导航。
我们再假设载体的初始坐标(□,λ)。
载体是匀速航行,且东向、北向的分速度分别是ve0、vn0。
我们沿着船舶平台的正东方和正北方各安装一个加速度计,从这两个速度计中的输出,可以根据载体沿正东方向和正北方向的加速度:ae和an,并与初始速度相加得到载体的东向与北向速度。
ve=ve+atvn=ve+at也可以用再北向与东向的加速度的一次积分再与初速度求和,得到东向与北向的瞬时速度。
根据ve、vn可得出载体位置坐标经纬度(□,λ)的变化率,再积分则得到经纬度的变化量,加上初始坐标即可的载体的瞬时位置:□=□+∫vn/rdtλ=λ+∫ve/r cos□dt在惯性导航系统发展的过程中,一直存在着两种发展方向,即平台式与捷联式。
平台式方案是将陀螺仪安装在由框架构成的稳定平台上,用陀螺仪敏感平台的角运动,通过平台稳定回路使平台保持指向向上的稳定,把加速度计也放在稳定平台上,其敏感轴的指向也是明确的,加速度的输出信息由导航计算机处理,可方便地提取载体的加速度,计算载体速度、位置以及平台的控制量。
捷联式惯性导航系统,导航加速度计和陀螺直接安装在载体上。
惯性导航系统原理及其应用作者:陈继伟夏楚瑜杨璐来源:《商情》2013年第33期【摘要】本文介绍了惯性导航系统的主要组成器件,基本原理和主要类型。
列举了惯性导航系统在当前的主要应用领域及发展趋势。
【关键词】惯性导航系统 INS 陀螺仪惯性导航系统(Inertial Navigation System)是以惯性原理为理论基础,以陀螺仪和加速度计等为硬件设备基础,结合机电,光学,物理,数学,计算机科学等多种学科技术建立的导航参数解算系统。
与天文导航系统,无线点导航系统,卫星导航系统相比,惯性导航系统具有设备隐蔽性,导航自主性和信息获取完整性等独特优点,故惯性导航系统一直作为一种重要的导航设备,广泛应用于民用,军事,科研等多个领域。
一、惯性仪表惯性仪表,又称惯性器件,是惯性导航系统获取导航参数的主要硬件设备。
目前,惯性仪表主要指陀螺仪和加速度计。
(一)陀螺仪陀螺仪主要用于获取运动体角运动信息。
陀螺仪具有两大特性:定轴性,在不受外力矩作用时,陀螺转子的方向始终指向初始恒定方向。
进动性,在受外力作用时,陀螺转子讲偏离原始方向,做以下运动:根据以上两个特性制成的陀螺仪能够精确测定陀螺轴指向。
目前,陀螺仪发展已经进入第四个阶段,即激光陀螺,静电陀螺,振动陀螺广泛应用。
在未来,高灵敏度,高可靠性,结构简单,成本低廉的光纤陀螺将是主要发展趋势。
(二)加速度仪加速度计主要用于获取运动体加速度信息。
假设加速度计处于垂直方向上,由于地球重力影响,根据牛顿第二定律,只需已知测试元件质量,通过测量测试元件所受的力,便可求出运动体加速度。
通常记f(specific force)定义为作用在单位质量的非引力外力,可由加速度计测出。
目前,工程上常采用具有偏心质量的摆式加速度,常见有液浮摆式加速度计,陀螺积分加速度计。
二、惯性导航系统分类根据构建导航坐标系方法不同,常将惯性导航系统分为两类平台式惯性导航系统,将加速度计安装在稳定平台上,稳定平台由陀螺仪控制,使平台始终与要求的导航坐标系保持一致。
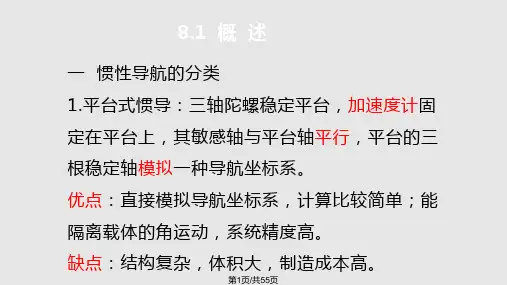
第8章平台式惯性导航系统原理及应用分解导航系统是指通过利用一些特定设备和技术,能够确定用户在地球表面的位置、速度和方向等信息的系统。
其中,惯性导航系统是一种通过测量加速度和角速度来获得位置和姿态等信息的导航系统。
平台式惯性导航系统是一种常见的惯性导航系统,具有广泛的应用领域。
平台式惯性导航系统主要由陀螺仪和加速度计两部分组成。
陀螺仪用于测量角速度,而加速度计用于测量加速度。
通过分析和处理这些测量数据,可以计算出导航系统的位置、速度和姿态等信息。
在平台式惯性导航系统中,陀螺仪和加速度计通常被安装在一个机械平台上,该平台可以旋转和倾斜。
当导航系统发生运动时,陀螺仪和加速度计可以测量出相应的角速度和加速度,进而计算出导航系统的姿态和加速度。
平台式惯性导航系统的原理是基于牛顿力学中的惯性定律。
根据惯性定律,一个物体在没有外力作用时,将保持其匀速直线运动状态,或者保持其静止状态。
因此,当平台式惯性导航系统没有受到其他力的影响时,陀螺仪和加速度计的测量数据可以被用来计算导航系统的姿态和加速度。
平台式惯性导航系统具有广泛的应用领域。
首先,它被广泛应用于航空航天领域。
在飞机和航天器的飞行过程中,由于缺乏地面参考,惯性导航系统可以提供稳定和精确的位置和姿态信息,从而保证飞行的安全和稳定性。
其次,平台式惯性导航系统也被广泛应用于海洋领域。
在海上航行中,由于海上条件的复杂性,常规导航系统容易受到干扰和影响。
而平台式惯性导航系统可以通过测量姿态和速度等信息来提供可靠的导航支持。
另外,平台式惯性导航系统还被应用于无人驾驶车辆、船舶和机器人等领域,以及医疗设备和工业自动化等领域。
总结起来,平台式惯性导航系统是一种通过测量陀螺仪和加速度计的数据来计算导航系统姿态和加速度的导航系统。
它的工作原理基于惯性定律,广泛应用于航空航天、海洋、无人驾驶和医疗设备等领域。
惯性导航系统的发展及应用绪论惯性导航是一门重要的学科技术,它是飞机、船舶、火箭等载体能顺利完成导航和控制任务的关键性技术之一。
1942年德国在V-2火箭上首次应用了惯性导航原理;1954年纯惯性导航系统在飞机上试飞成功。
30余年来,惯性导航技术获得迅速发展。
在我国惯性导航技术已在航空、航天、航海和陆地车辆的导航和定位中得到应用。
1970年以来,我过多次发射的人造地球卫星和火箭都采用了本国研制的惯性导航系统。
不仅如此,70多年以来,这门科学技术还在大地测量、海洋勘测、石油钻井、航空测量和摄影等国民经济领域里获得成功应用。
惯性导航简介惯性导航(Inertial Navigation)是20 世纪中期发展起来的完自主式的导航技术。
通过惯性测量组件(IMU)测量载体相对惯性空间的角速率和加速度信息,利用牛顿运动定律自动推算载体的瞬时速度和位置信息,具有不依赖外界信息、不向外界辐射能量、不受干扰、隐蔽性好的特点,且惯导系统能连续地提供载体的全部导航、制导参数(位置、线速度、角速度、姿态角)。
惯性导航技术,包括平台式惯导系统和捷联惯导系统。
平台式惯性导航系统将陀螺通过平台稳定回路控制平台跟踪导航坐标系在惯性空间的角速度。
捷联惯性导航系统利用相对导航坐标系角速度计算姿态矩阵,把雷体坐标系轴向加速度信息转换到导航坐标系轴向并进行导航计算。
惯性导航系统通常由惯性测量装置、计算机、控制显示器等组成。
惯性测量装置包括加速度计和陀螺仪,又称惯性导航组合。
3个自由度陀螺仪用来测量飞行器的三个转动运动;3个加速度计用来测量飞行器的3个平移运动的加速度。
计算机根据测得的加速度信号计算出飞行器的速度和位置数据。
控制显示器显示各种导航参数。
陀螺仪陀螺仪是惯性系统的主要元件。
陀螺仪通常是指安装在万向支架中高速旋转的转子,转子同时可绕垂直于自转轴的一根轴或两根轴进动,前者称单自由度陀螺仪,后者称二自由度陀螺仪。
陀螺仪具有定轴性和进动性,利用这些特性制成了敏感角速度的速率陀螺和敏感角偏差的位置陀螺。
第8章平台式惯性导航系统原理及应用平台式惯性导航系统(Inertial Navigation System,简称INS)是一种基于惯性传感器的导航系统,它通过测量和积分加速度和角速度来得出飞行器在空间中的位置、速度和姿态。
平台式INS由惯性测量单元(Inertial Measurement Unit,简称IMU)和数据处理单元组成,广泛应用于航空、航天、海洋、地质勘探等领域。
平台式INS的原理是基于牛顿第二定律和角动量守恒定律。
当飞行器作加速度和角速度运动时,惯性传感器会感知到这些运动并输出相应的信号。
IMU通常由加速计和陀螺仪组成,加速计用于测量加速度,陀螺仪用于测量角速度。
通过对加速度和角速度进行积分,可以得到飞行器在三维空间中的位置、速度和姿态。
平台式INS的应用十分广泛。
在航空领域,它被用于航空器的导航、制导和控制系统,可以实现自主飞行和目标跟踪。
在航天领域,它被用于航天器的姿态控制和轨迹修正。
在海洋领域,它被用于船舶和潜艇的导航和定位。
在地质勘探领域,它被用于测量地震波和地壳变动。
平台式INS具有许多优点。
首先,它不受外界环境的影响,可以在任何条件下进行导航。
其次,它具有高精度和高精度保持能力,可以提供精确的导航信息。
再次,它具有良好的可靠性和稳定性,可以长时间运行而不受干扰。
然而,平台式INS也存在一些局限性。
首先,积分误差会随时间的推移累积,导致导航精度下降。
其次,惯性传感器本身存在零偏和尺度因素等误差,需要进行校准和补偿。
再次,平台式INS在长时间无法接收外部定位信息的情况下,会出现漂移现象,导航精度降低。
为了克服这些问题,常常采取多传感器融合的方法,将惯性传感器与其他定位系统(如全球定位系统)相结合,以提高导航精度和可靠性。
另外,还可以使用自适应滤波和状态估计算法对积分误差和传感器误差进行校正和补偿。
总之,平台式惯性导航系统是一种基于惯性传感器的导航系统,通过测量和积分加速度和角速度来得出飞行器在空间中的位置、速度和姿态。