svpwm三次谐波注入原理
- 格式:docx
- 大小:15.21 KB
- 文档页数:2
SVPWM的原理讲解SVPWM(Space Vector Pulse Width Modulation)是一种基于空间矢量的脉宽调制技术,用于控制交流电机的三相逆变器。
它在电机控制中广泛应用,具有高效、低失真和高精度的优点。
本文将从原理、工作原理和优点三个方面对SVPWM进行详细介绍。
一、原理SVPWM的基本原理是将三相电压分解为alpha轴和beta轴的两个独立分量,然后根据alpha和beta的大小和相位差计算得到一个空间矢量,最后根据空间矢量的方向和大小来确定控制电压波形。
通过合理的调节控制电压的大小和频率,可以实现对电机的精确控制。
二、工作原理1. 坐标变换:将三相电压转换为alpha轴和beta轴的分量,通过如下公式计算得到alpha和beta:alpha = 2/3*Va - 1/3*Vb - 1/3*Vcbeta = sqrt(3)/3*Vb - sqrt(3)/3*Vc2. 空间矢量计算:根据alpha和beta的大小和相位差计算得到空间矢量。
空间矢量的方向和大小决定了逆变器输出电压的形状和频率。
3.脉宽调制:根据空间矢量的方向和大小来确定脉冲的宽度和频率。
通常,采用时间比较器和斜坡发生器来实现脉冲宽度调制,使得逆变器输出的脉冲宽度能够跟随空间矢量的变化。
4.逆变器控制:将调制好的脉宽信号通过逆变器输出到交流电机。
逆变器通过控制脉冲宽度和频率来改变输出电压的形状和频率,从而实现对电机的精确控制。
三、优点1.高效:SVPWM技术能够将三相电压转换为整数变化的脉宽信号,减少了功率器件的开关次数,提高了逆变器的转换效率。
2.低失真:SVPWM技术能够通过精确控制脉冲宽度和频率来改变输出电压的形状和频率,减小了电机输出的谐波失真,提高了电机的运行效果和负载能力。
3.高精度:SVPWM技术能够实现对电机的精确控制,通过调整输出电压的波形和频率,可以实现电机的恒转矩和恒转速控制,提高了电机的控制精度和稳定性。
SVPWM的原理和法则推导和控制算法详细讲解SVPWM(Space Vector Pulse Width Modulation)是一种三相不对称多电平PWM调制技术。
其原理是将三相电压转换为空间矢量信号,通过调制的方式控制逆变器输出电压,以实现对三相电机的控制。
下面将详细介绍SVPWM的原理、法则推导以及控制算法。
一、原理:SVPWM的原理在于将三相电压分解为两相,即垂直于矢量且相互垂直的两个分量,直流坐标分量和交流坐标分量。
其中,直流坐标分量用于产生直流电压,交流坐标分量用于产生交流电压。
通过对直流和交流坐标的调制,可以生成所需的输出电压。
二、法则推导:1.将三相电压写成直流坐标系下的矢量形式:V_dc = V_d - 0.5 * V_a - 0.5 * V_bV_ac = sqrt(3) * (0.5 * V_a - 0.5 * V_b)2. 空间矢量信号通过电源电压和载波进行调制来生成输出电压。
其中,电源电压表示为空间矢量V。
根据配比原则,V_dc和V_ac分别表示空间矢量V沿直流和交流坐标的分量。
V = V_dc + V_ac3.根据法则推导,导出SVPWM的输出电压:V_u = 1/3 * (2 * V_dc + V_ac)V_v = 1/3 * (-V_dc + V_ac)V_w = 1/3 * (-V_dc - V_ac)三、控制算法:1. 设定目标矢量Vs,将其转换为直流坐标系分量V_dc和交流坐标系分量V_ac。
2.计算空间矢量的模长:V_m = sqrt(V_dc^2 + V_ac^2)3.计算空间矢量与各相电压矢量之间的夹角θ:θ = arctan(V_ac / V_dc)4.计算换向周期T和换相周期T1:T=(2*π*N)/ω_eT1=T/6其中,N为极对数,ω_e为电机的角速度。
5.根据目标矢量和夹角θ,确定目标矢量对应的扇区。
6.根据目标矢量和目标矢量对应的扇区,计算SVPWM的换相角度β和占空比:β=(2*π*N*θ)/3D_u = (V_m * cos(β) / V_dc) + 0.5D_v = (V_m * cos(β - (2 * π / 3)) / V_dc) + 0.5D_w=1-D_u-D_v以上步骤即为SVPWM的控制算法。
svpwm的原理及法则推导和控制算法详解SVPWM是一种用于控制三相变频器的有效技术。
它通过在三相沟道中
交替地把三个不同的正弦波源转换为四个不同的交流电路来实现控制,每
个交流电路都有一个相应的SVPWM电流控制量。
主要的原理是运用一个有
限正弦波源和交替的沟道控制,可将三相电流输出至每个沟道中。
控制算
法主要包括以下步骤:1、确定每个沟道相应的切换频率;2、根据切换频率,再按照sinusoidal规则计算出每个沟道相应的SVPWM电流控制量;3、根据SVPWM电流控制量,确定每个沟道的控制时钟;4、根据控制时钟控
制三相变频器以实现相应的电流控制。
svpwm的原理及法则推导和控制算法详解SVPWM是一种空间矢量脉宽调制技术,常应用于交流电机的无传感器矢量控制方案中。
SVPWM的原理及法则推导涉及到三相交流电机理论、空间矢量分析以及脉宽调制等内容。
下面将对SVPWM的原理、法则推导和控制算法进行详解。
1.SVPWM原理SVPWM的原理是基于交流电机的三相正弦波电流与空间矢量之间的转换关系。
交流电机的电流空间矢量可以表示为一个复数形式,即电流空间矢量(ia, ib, ic) = ia + jib。
空间矢量在空间中对应一个电机角度θ。
SVPWM的目标是控制交流电机的三相正弦波电流,使其与预期空间矢量一致,从而控制电机输出力矩和转速。
SVPWM首先对预期空间矢量进行空间矢量分解,将其分解为两个基本矢量Va和Vb。
然后根据电机角度θ和两个基本矢量的大小比例,计算出三相正弦波电流的幅值和相位。
2.SVPWM法则推导SVPWM的法则推导是为了实现精确控制电机的输出力矩和转速。
在法则推导中,首先需要建立电流与电压之间的关系,然后计算出三相正弦波电流的幅值和相位。
最后根据幅值和相位生成PWM波形,控制交流电机的动作。
具体推导过程如下:-步骤1:计算Va和Vb的大小比例,根据预期空间矢量和电机角度θ,可以通过三角函数计算出Va和Vb的幅值。
-步骤2:计算Vc,由于交流电机为三相对称系统,Vc的幅值等于Va和Vb的和,相位等于Va相位加120度。
-步骤3:计算三相正弦波电流的幅值和相位,幅值可以通过输入电压和阻抗模型计算得到。
-步骤4:根据幅值和相位生成PWM波形。
3.SVPWM控制算法SVPWM控制算法实现了对交流电机输出力矩和转速的精确控制。
- 步骤1:通过位置传感器或者传感器less技术获取电机角度θ。
-步骤2:根据预期输出力矩和转速,计算出预期空间矢量。
-步骤3:根据电机角度θ和预期空间矢量,计算出Va和Vb的幅值。
-步骤4:根据Va和Vb的大小比例和Vc的相位,生成PWM波形。
svpwm三次谐波从19世纪开始,人们就意识到了高次谐波对信号带来的危害。
对于电子信息设备而言,它通常指高于工作频率的成分,如微波、无线电波等,谐波是造成电子信息设备误码率上升和噪声干扰增大的主要原因之一。
谐波问题包括三个方面:这种频谱展宽一般都在2.5~4.5Hz 范围内,通常由二次以上的谐波叠加形成。
我们知道,任何信号总会存在一些频率为基波的倍数的部分或者说是谐波分量,也即各次谐波。
一个正弦波分量,其角频率 f 与基波频率 f0之比称为信号的幅度比,简写为 L/ f。
显然,正弦波各次谐波都具有不同程度的相位滞后,导致发射机输出信号的某些参数变化,从而影响发射效果,降低了设备的使用寿命;另外,当正弦波分量为两倍频时,它将产生三倍频分量,此时,虽然没有基波成份,但却出现更强的电磁辐射,严重地影响接收机的灵敏度和接收效果。
对于一般的工业过程控制系统来讲,频谱分析仪能够得出精确的直流参考电压和电流值及3~20Hz 的调节信号,因而可靠性较高。
然而,实际应用中由于受到非线性负载的影响,必须进行频谱分析仪的功能测试,找出信号的峰-谷现象并做出相应处理。
图1是在工业过程控制系统中典型的传感器负载状态,由于受到被测电路频率的限制,选择了谐振回路和负反馈环节的前端进行仿真研究。
采样周期取0.01s,输入信号为20Hz 的矩形脉冲,其有效值为100kV,幅值为5V,输出为直流量的脉冲串信号。
由于负载呈现非线性特征,故可能引起脉冲串失真和三次谐波的展宽。
从上述仿真结果可见,工业过程控制系统的电气谐波成份主要集中在 f=400 Hz 和 f=1khz 左右,其余高于这两个频段的谐波几乎全部被抑制掉。
因此,通过在 PWM 调制中采用滤波器滤除信号中的低次谐波,并且保证信号峰值不超过10V 的条件下,即可满足控制系统的要求。
这种失真的原因可能有很多,有时候是一种谐波与另一种谐波共同作用的结果。
在非线性系统里,如果所讨论的控制系统是纯阻抗系统,那么产生谐波失真的主要原因就是控制电源本身的非线性;如果所讨论的控制系统既含有纯电阻性质又含有非线性元件的混合系统,那么产生谐波失真的主要原因则是控制电源本身的非线性与控制对象(如负载)本身的非线性的综合影响。
svpwm三次谐波注入原理
SVPWM三次谐波注入原理是一种常用的电力电子调制技术,用于控制三相电压源逆变器的输出电压。
它通过注入三次谐波信号来改变输出电压波形,实现对电机转矩和转速的精确控制。
在SVPWM三次谐波注入原理中,通过改变逆变器的开关状态,控制输出电压的大小和相位。
三次谐波注入则是在正常的PWM调制基础上,加入一个具有特定频率和幅值的三次谐波信号。
这个谐波信号由一个三次谐波发生器产生,然后与基波信号叠加在一起,形成最终的PWM调制信号。
三次谐波信号的注入可以使得逆变器输出的电压波形更加接近正弦波,减小了电机运行时的谐波失真。
同时,通过调节三次谐波信号的幅值和相位,可以实现对电机转矩和转速的精确控制。
SVPWM三次谐波注入原理的关键在于对三次谐波信号的准确控制。
通过调节谐波信号的频率和幅值,可以实现对输出电压的精确调节。
此外,还需要考虑逆变器的开关状态以及开关时间的控制,确保输出电压的稳定性和可靠性。
SVPWM三次谐波注入原理是一种有效的电力电子调制技术,可用于控制三相电压源逆变器的输出电压。
通过注入三次谐波信号,可以改善电机运行时的谐波失真,并实现对电机转矩和转速的精确控制。
这一技术在工业控制领域中得到了广泛应用,为电力系统的稳
定运行和高效运转提供了重要支持。
1 空间电压矢量调制 SVPWM 技术SVPWM 是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽 可能接近于理想的正弦波形。
空间电压矢量PWM 与传统的正弦PWM 不同,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链轨迹。
SVPWM 技术与SPWM 相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于实现数字化。
下面将对该算法进行详细分析阐述。
SPWM 通过控制开关器件的关断得到正弦的输入电压;SVPWM 的控制目标在于如何获得一个圆形的旋转磁场。
之所以成为矢量控制,是因为通过SVPWM 对晶闸管导通的控制可以得到一系列大小和方向可变的空间电压矢量,通过对空间电压矢量进行控制,从而得到圆形旋转磁场。
1.1 SVPWM 基本原理SVPWM 的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。
在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。
两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近按圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM 波形。
逆变电路如图 2-8 示。
设直流母线侧电压为Udc,逆变器输出的三相相电压为UA 、UB 、UC,其分别加在空间上互差120°的三相平面静止坐标系上,可以定义三个电压空间矢量 UA t 、UB t 、UC t ,它们的方向始终在各相的轴线上,而大小则随时间按正弦规律做变化,时间相位互差120°。
假设Um 为相电压有效值,f 为电源频率,则有:⎪⎩⎪⎨⎧+=-==)3/2cos()()3/2cos()()cos()(πθπθθm Cm B m A U t U U t U U t U 2-27 其中,ft πθ2=,则三相电压空间矢量相加的合成空间矢量 U t 就可以表示为:θππj m j C j B A e U e t U e t U t U t U 23)()()()(3/43/2=++= 2-28可见 U t 是一个旋转的空间矢量,它的幅值为相电压峰值的倍,Um 为相电压峰值,且以角频率ω=2πf 按逆时针方向匀速旋转的空间矢量,合成空间电压矢量U t 为一个幅值恒定、逆时针旋转速度恒定的一个空间电压矢量。
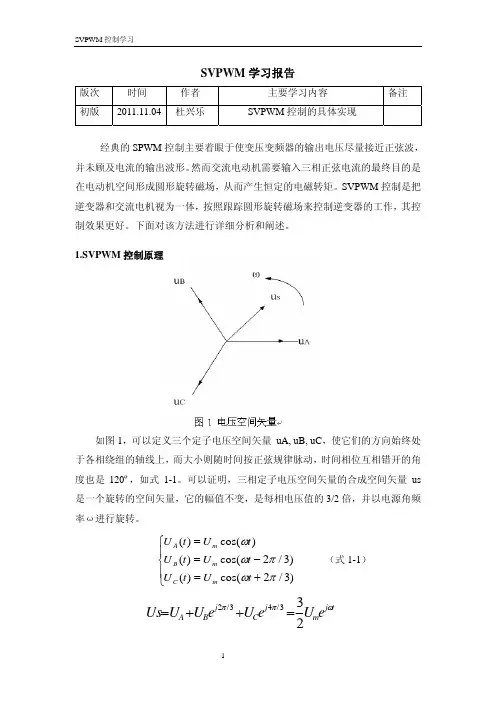
1、SVPWM 的定义交流电动机需要输入三相正弦电流的最终目的是在电动机空间形成圆形旋转磁场,从而产生恒定的电磁转矩。
把逆变器和交流电动机视为一体,以圆形旋转磁场为目的来控制逆变器的工作,这种控制方法称为“磁链跟踪控制”,磁链轨迹的控制是通过交替使用不同的电压空间矢量来实现的,所以又称为“电压空间矢量PWM (space vector PWM , SVPWM )控制”矢量:既有大小又有方向的量。
一般来说,在物理学中称作矢量,在数学中称作向量。
2、空间矢量的定义:交流电动机绕组的电压、电流、磁链等物理量都是随时间变化的,如果考虑到他们所在绕组的空间位置,可以定义为空间矢量。
A 、B 、C 分别表示在空间静止的电动机定子三相绕组的轴线,它们在空间互差2pi/3,三相定子相电压AO u 、BO u 、CO u 分别加在三相绕组上,可以定义三个定子电压空间矢量AO U 、BO U 、CO U 。
三相合成矢量:γγ2j CO j BO AO CO BO AO s e ku e ku ku U U U U ++=++= 当定子相电压AO u 、BO u 、CO u 为三相平衡正弦电压时,三相合成矢量s U 是一个以电源角频率为角速度作恒速旋转的空间矢量,它的幅值是相电压幅值的倍,当某一相电压为最大值时,合成电压矢量s U 就落在该相的轴线上。
在三相平衡正弦电压供电时,若电动机转速已稳定,则定子电流和磁链的空间矢量s I 和s ψ的幅值恒定,以电源角频率为电气角速度在空间作恒速旋转。
3、电压与磁链空间矢量的关系当异步电动机的三相对称定子绕组由三相电压供电时,对每一相都可写出一个电压平衡方程式,求三相电压平衡方程式的矢量和,即得用合成空间矢量表示的定子电压方程式当电动机转速不是很低时,定子电阻压降所占的成分很小,可以忽略不计,则定子合成电压与合成磁链空间矢量的近似关系为 或 ⎰=dt u s s ψ当电动机由三相平衡正弦电压供电时,电动机定子磁链幅值恒定,其空间矢量以恒速旋转,磁链矢量顶端的运动轨迹呈圆形(简称磁链园)。
svpwm三次谐波注入原理
SVPWM三次谐波注入原理
在电力传输和电机控制领域,SVPWM(Space Vector Pulse Width Modulation)是一种常用的调制方法,用于实现电压变换和电机转速控制。
SVPWM通过调整电压的脉冲宽度来控制电机的输出,以实现精确的转速控制和高效的能量转换。
SVPWM的核心原理是通过合理的电压脉冲宽度分配,将输入电压转换为电机所需的三相正弦波信号。
为了提高电机的效率和性能,传统的SVPWM方法在基波的基础上注入了三次谐波。
三次谐波注入的目的是为了消除电机输出中的低频振荡,提高电机的响应速度和转矩控制精度。
注入的三次谐波信号与基波信号相位相差120度,通过适当调整注入的幅值和相位,可以实现更精确的电机控制。
在SVPWM中,三相电压通过逆变器的开关管控制,通过调节开关管的导通时间和关断时间来实现不同电平的输出电压。
在正常的SVPWM中,开关管的导通时间和关断时间是固定的,只有在注入三次谐波的情况下才会发生改变。
通过注入三次谐波,SVPWM可以实现更精确的电机控制。
注入的三次谐波信号会改变开关管的导通时间和关断时间,从而改变输出电压的波形。
这样一来,电机的输出波形更加接近理想的正弦波,
减少了低频振荡,提高了电机的效率和性能。
SVPWM三次谐波注入原理是通过调整电压脉冲宽度分配和注入三次谐波信号,实现电机的精确控制和高效能量转换。
通过合理地注入三次谐波,可以消除电机输出中的低频振荡,提高电机的响应速度和转矩控制精度。
这种方法在电力传输和电机控制领域得到了广泛应用,为电机控制提供了一种高效可靠的解决方案。
空间电压矢量调制 SVPWM 技术SVPWM 是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽 可能接近于理想的正弦波形。
空间电压矢量PWM 与传统的正弦PWM 不同,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链轨迹。
SVPWM 技术与SPWM 相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于实现数字化。
下面将对该算法进行详细分析阐述。
SPWM 通过控制开关器件的关断得到正弦的输入电压;SVPWM 的控制目标在于如何获得一个圆形的旋转磁场。
之所以成为矢量控制,是因为通过SVPWM 对晶闸管导通的控制可以得到一系列大小和方向可变的空间电压矢量,通过对空间电压矢量进行控制,从而得到圆形旋转磁场。
1.1 SVPWM 基本原理SVPWM 的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。
在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。
两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近按圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM 波形。
逆变电路如图 2-8 示。
设直流母线侧电压为Udc ,逆变器输出的三相相电压为UA 、UB 、UC ,其分别加在空间上互差120°的三相平面静止坐标系上,可以定义三个电压空间矢量 UA(t)、UB(t)、UC(t),它们的方向始终在各相的轴线上,而大小则随时间按正弦规律做变化,时间相位互差120°。
假设Um 为相电压有效值,f 为电源频率,则有:⎪⎩⎪⎨⎧+=-==)3/2cos()()3/2cos()()cos()(πθπθθm Cm B m A U t U U t U U t U (2-27) 其中,ft πθ2=,则三相电压空间矢量相加的合成空间矢量 U(t)就可以表示为:θππj m j C j B A e U e t U e t U t U t U 23)()()()(3/43/2=++= (2-28) 可见 U(t)是一个旋转的空间矢量,它的幅值为相电压峰值的1.5倍,Um 为相电压峰值,且以角频率ω=2πf 按逆时针方向匀速旋转的空间矢量,合成空间电压矢量U (t )为一个幅值恒定、逆时针旋转速度恒定的一个空间电压矢量。
SVPWM调制技术的基本原理和推导流程一、引言SVPWM(Space Vector Pulse Width Modulation)是一种常用于交流电机驱动系统中的调制技术。
它通过控制电压矢量的合成方式,实现对电机电压的精确控制,从而实现对电机输出转矩和速度的控制。
本文将介绍SVPWM的基本原理和推导流程,并深入探讨其在电机驱动系统中的应用。
二、SVPWM的基本原理SVPWM是一种综合了空间矢量理论和PWM调制原理的调制技术。
其基本原理是将三相电流控制转换为三相电压控制,通过改变电压矢量的合成方式来控制电机的输出。
具体原理如下:1.将三相电流转换为空间矢量:将三相电流变换成一个空间矢量,表示为一个旋转矢量。
该空间矢量由两个独立的矢量分量组成,一个是等幅值的正序矢量,表示直流分量,另一个是相位延迟120°的负序矢量,表示交流分量。
2.合成电压矢量:通过改变正序和负序矢量的合成方式,得到与期望输出转矩和速度匹配的合成电压矢量。
合成电压矢量的方向和幅值决定了所控制的三相电机的输出状态。
3.PWM调制:根据合成电压矢量,使用PWM技术对电机供电进行调制。
将合成电压矢量转换为适合驱动三相电机的高频脉冲信号,控制电机的输出转矩和速度。
三、SVPWM的推导流程下面将以三相三线制逆变器为例,推导SVPWM的具体流程:1. 定义输入信号假设三相三线制逆变器的输入信号为:正向序列的期望电流 (I_{ref}) 和方向(θ_{ref}),负向序列的相位(θ_{ref}-120°) 和(θ_{ref}-240°)。
2. 转换为空间矢量根据输入信号,将正向序列的电流 (I_{ref}) 和相位(θ_{ref}) 转换为空间矢量表示。
正向序列的空间矢量为:[V_{ref_α} = I_{ref} cos(θ_{ref})] [V_{ref_β} = I_{ref} sin(θ_{ref})]负向序列的空间矢量为:[V_{ref_{-β}} = I_{ref} sin(θ_{ref}-120°)] [V_{ref_{-α}} = I_{ref} cos(θ_{ref}-120°)]3. 合成电压矢量将正向序列的空间矢量(V_{ref_α}) 和(V_{ref_β}) 与负向序列的空间矢量(V_{ref_{-β}}) 和 (V_{ref_{-α}}) 进行合成,得到合成电压矢量(V_{ref_1})、(V_{ref_2}) 和 (V_{ref_0}):[V_{ref_1} = V_{ref_α} + V_{ref_{-β}}] [V_{ref_2} = V_{ref_β} +V_{ref_{-α}}] [V_{ref_0} = - V_{ref_1} - V_{ref_2}]4. 对合成电压矢量进行坐标变换将合成电压矢量的α、β 坐标系转换为直角坐标系,得到合成电压矢量的(V_{ref_x}) 和 (V_{ref_y}):[V_{ref_x} = V_{ref_2}] [V_{ref_y} = V_{ref_1} - V_{ref_0}]5. 计算电压矢量的幅值和角度根据合成电压矢量的 (V_{ref_x}) 和 (V_{ref_y}),计算合成电压矢量的幅值(V_{ref}) 和相位角(θ_{ref}):[V_{ref} = ] [θ_{ref} = ()]6. 计算每个扇区的占空比根据合成电压矢量的相位角(θ_{ref}),判断它在哪个扇区内,并计算该扇区的占空比:•扇区1:(0° θ_{ref} < 60°)占空比:–T1:(d = )–T2:(0)–T0:(1 - d)•扇区2:(60° θ_{ref} < 120°)占空比:–T1:(-d = -)–T2:(d + 1)–T0:(0)•扇区3:(120° θ_{ref} < 180°)占空比:–T1:(d = )–T2:(1)–T0:(d + 1)•扇区4:(180° θ_{ref} < 240°)占空比:–T1:$-d = -$–T2:(0)–T0:(1)•扇区5:(240° θ_{ref} < 300°)占空比:–T1:(d = )–T2:(0)–T0:(1 - d)•扇区6:(300° θ_{ref} < 360°)占空比:–T1:(-d = -)–T2:(d + 1)–T0:(0)7. 实现PWM调制根据每个扇区的占空比,使用PWM技术对电机供电进行调制,生成适合电机驱动的高频脉冲信号。
SVPWM的原理讲解以及应用过程中的推导与计算D可见 U(t)是一个旋转的空间矢量,它的幅值为相电压峰值的1.5倍,Um 为相电压峰值,且以角频率ω=2πf 按逆时针方向匀速旋转的空间矢量,而空间矢量 U(t)在三相坐标轴(a ,b ,c )上的投影就是对称的三相正弦量。
图 2-8 逆变电路由于逆变器三相桥臂共有6个开关管,为了研究各相上下桥臂不同开关组合时逆变器输出的空间电压矢量,特定义开关函数 Sx ( x = a 、b 、c) 为:⎩⎨⎧=下桥臂导通上桥臂导通01x S (2-30)(Sa 、Sb 、Sc)的全部可能组合共有八个,包括6个非零矢量 Ul(001)、U2(010)、U3(011)、U4(100)、U5(101)、U6(110)、和两个零矢量 U0(000)、U7(111),下面以其中一 种开关 组 合为 例分 析,假设Sx ( x= a 、b 、c)= (100),此 时UdcUa UbUc 矢矢U4矢100矢N⎪⎩⎪⎨⎧=++=-=--===0,,0,cN bN aNc d cN aN dc bN aN dc ca bc dc ab U U U U U U U U U U U U U U(2-30)求解上述方程可得:Uan=2Ud /3、UbN=-U d/3、UcN=-Ud /3。
同理可计算出其它各种组合下的空间电压矢量,列表如下:表 2-1 开关状态与相电压和线电压的对应关系 S aSb Sc 矢量符号 线电压相电压Ua b UbcUca UaN UbN UcN0 0 0 U0 0 0 01 0 0 U4 Ud c 0 -Ud cdc U 32dc U 31- dc U 31- 1 1 0U6Ud c -Ud cdc U 31dc U 31dc U 32-0 1 0 U2 -UdcUdc0 dc U31-dcU32dcU31-0 1 1 U3 -Udc0 Udc dc U32-dcU31dcU310 0 1 U1 0 -UdcUdc dc U31-dcU31-dcU321 0 1 U5 Udc-Udc0 dc U31dcU32-dcU311 1 1 U7 0 0 0 0 0 0 图 2-9 给出了八个基本电压空间矢量的大小和位置。
一直以来对SVPWM 原理和实现方法困惑颇多,无奈现有资料或是模糊不清,或是错误百出。
经查阅众多书籍论文,长期积累总结,去伪存真,总算对其略窥门径。
未敢私藏,故公之于众。
其中难免有误,请大家指正,谢谢!1 空间电压矢量调制 SVPWM 技术SVPWM 是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽 可能接近于理想的正弦波形。
空间电压矢量PWM 与传统的正弦PWM 不同,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链轨迹。
SVPWM 技术与SPWM 相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于实现数字化。
下面将对该算法进行详细分析阐述。
1.1 SVPWM 基本原理SVPWM 的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。
在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。
两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近按圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM 波形。
逆变电路如图 2-8 示。
设直流母线侧电压为Udc ,逆变器输出的三相相电压为UA 、UB 、UC ,其分别加在空间上互差120°的三相平面静止坐标系上,可以定义三个电压空间矢量 UA(t)、UB(t)、UC(t),它们的方向始终在各相的轴线上,而大小则随时间按正弦规律做变化,时间相位互差120°。
假设Um 为相电压有效值,f 为电源频率,则有:⎪⎩⎪⎨⎧+=-==)3/2cos()()3/2cos()()cos()(πθπθθm Cm B m A U t U U t U U t U (2-27) 其中,ft πθ2=,则三相电压空间矢量相加的合成空间矢量 U(t)就可以表示为:θππj m j C j B A e U e t U e t U t U t U 23)()()()(3/43/2=++= (2-28)可见 U(t)是一个旋转的空间矢量,它的幅值为相电压峰值的1.5倍,Um 为相电压峰值,且以角频率ω=2πf 按逆时针方向匀速旋转的空间矢量,而空间矢量 U(t)在三相坐标轴(a ,b ,c )上的投影就是对称的三相正弦量。
1、SVPWM 的定义交流电动机需要输入三相正弦电流的最终目的是在电动机空间形成圆形旋转磁场,从而产生恒定的电磁转矩。
把逆变器和交流电动机视为一体,以圆形旋转磁场为目的来控制逆变器的工作,这种控制方法称为“磁链跟踪控制”,磁链轨迹的控制是通过交替使用不同的电压空间矢量来实现的,所以又称为“电压空间矢量PWM (space vector PWM , SVPWM )控制”矢量:既有大小又有方向的量。
一般来说,在物理学中称作矢量,在数学中称作向量。
2、空间矢量的定义:交流电动机绕组的电压、电流、磁链等物理量都是随时间变化的,如果考虑到他们所在绕组的空间位置,可以定义为空间矢量。
A 、B 、C 分别表示在空间静止的电动机定子三相绕组的轴线,它们在空间互差2pi/3,三相定子相电压、、AO u BO u 分别加在三相绕组上,可以定义三个定子电压空间矢量、CO u AO U 、。
BO U CO U 三相合成矢量:当定子相γγ2j CO j BO AO CO BO AO s e ku e ku ku U U U U ++=++=电压、、为三相平衡正弦电压时,三相合成矢量是AO u BO u CO u s U 一个以电源角频率为角速度作恒速旋转的空间矢量,它的幅值是相电压幅值的倍,当某一相电压为最大值时,合成电压矢量就落在s U 该相的轴线上。
在三相平衡正弦电压供电时,若电动机转速已稳定,则定子电流和磁链的空间矢量和的幅值恒定,以电源角频率s I s ψ为电气角速度在空间作恒速旋转。
3、电压与磁链空间矢量的关系当异步电动机的三相对称定子绕组由三相电压供电时,对每一相都可写出一个电压平衡方程式,求三相电压平衡方程式的矢量和,即得用合成空间矢量表示的定子电压方程式dtd i R u ss s s ψ+=当电动机转速不是很低时,定子电阻压降所占的成分很小,可以忽略不计,则定子合成电压与合成磁链空间矢量的近似关系为dtd u ss ψ=或⎰=dt u s s ψ当电动机由三相平衡正弦电压供电时,电动机定子磁链幅值恒定,其空间矢量以恒速旋转,磁链矢量顶端的运动轨迹呈圆形(简称磁链园)。
空间电压矢量调制 SVPWM 技术SVPWM 是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽 可能接近于理想的正弦波形。
空间电压矢量PWM 与传统的正弦PWM 不同,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链轨迹。
SVPWM 技术与SPWM 相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于实现数字化。
下面将对该算法进行详细分析阐述。
SPWM 通过控制开关器件的关断得到正弦的输入电压;SVPWM 的控制目标在于如何获得一个圆形的旋转磁场。
之所以成为矢量控制,是因为通过SVPWM 对晶闸管导通的控制可以得到一系列大小和方向可变的空间电压矢量,通过对空间电压矢量进行控制,从而得到圆形旋转磁场。
1.1 SVPWM 基本原理SVPWM 的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。
在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。
两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近按圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM 波形。
逆变电路如图 2-8 示。
设直流母线侧电压为Udc ,逆变器输出的三相相电压为UA 、UB 、UC ,其分别加在空间上互差120°的三相平面静止坐标系上,可以定义三个电压空间矢量 UA(t)、UB(t)、UC(t),它们的方向始终在各相的轴线上,而大小则随时间按正弦规律做变化,时间相位互差120°。
假设Um 为相电压有效值,f 为电源频率,则有:⎪⎩⎪⎨⎧+=-==)3/2cos()()3/2cos()()cos()(πθπθθm Cm B m A U t U U t U U t U (2-27) 其中,ft πθ2=,则三相电压空间矢量相加的合成空间矢量 U(t)就可以表示为:θππj m j C j B A e U e t U e t U t U t U 23)()()()(3/43/2=++= (2-28) 可见 U(t)是一个旋转的空间矢量,它的幅值为相电压峰值的1.5倍,Um 为相电压峰值,且以角频率ω=2πf 按逆时针方向匀速旋转的空间矢量,合成空间电压矢量U (t )为一个幅值恒定、逆时针旋转速度恒定的一个空间电压矢量。
svpwm三次谐波注入原理
SVPWM(Space Vector Pulse Width Modulation,空间矢量脉
宽调制)是一种现代PWM技术,它通过合理的矢量控制,可以实现
对三相逆变器的PWM波形进行精确控制。
而三次谐波注入则是SVPWM技术的一种改进方法,用于减小逆变器输出电流的谐波含量。
下面我将从原理、实现和优劣势三个方面来全面解释SVPWM三次谐
波注入的原理。
首先,从原理来看,SVPWM三次谐波注入是通过在SVPWM控制
中注入一定频率和幅值的三次谐波信号,使得逆变器输出电流中的
三次谐波得到抑制。
这是因为在SVPWM控制中,逆变器输出电流的
波形是由若干个基波矢量和零矢量组合而成的,通过在SVPWM控制
中加入三次谐波信号,可以改变基波和零序矢量的选择,从而抑制
输出电流中的三次谐波分量。
其次,从实现方面来看,SVPWM三次谐波注入需要在SVPWM控
制算法中加入三次谐波信号的生成和注入模块。
具体地,需要通过
计算得到三次谐波信号的频率和幅值,并将其与基波矢量和零矢量
进行合理的组合,以实现对逆变器输出电流的三次谐波抑制。
这样
可以在不增加硬件成本的情况下,改善逆变器输出电流的谐波含量。
最后,从优劣势方面来看,SVPWM三次谐波注入的优势在于可以有效抑制逆变器输出电流中的三次谐波,改善电力系统的谐波污染问题,提高逆变器的输出电流质量。
然而,SVPWM三次谐波注入也存在一些缺点,例如需要对SVPWM控制算法进行改进和复杂的三次谐波信号生成模块,增加了控制系统的复杂度和成本。
综上所述,SVPWM三次谐波注入通过在SVPWM控制中注入三次谐波信号,可以有效抑制逆变器输出电流中的三次谐波,改善电力系统的谐波污染问题。
然而,其实现需要对SVPWM控制算法进行改进,并且增加了一定的复杂度和成本。
在实际应用中,需要综合考虑系统的需求和成本因素,选择合适的控制策略。