线性系统理论1数学基础
- 格式:ppt
- 大小:1.03 MB
- 文档页数:71
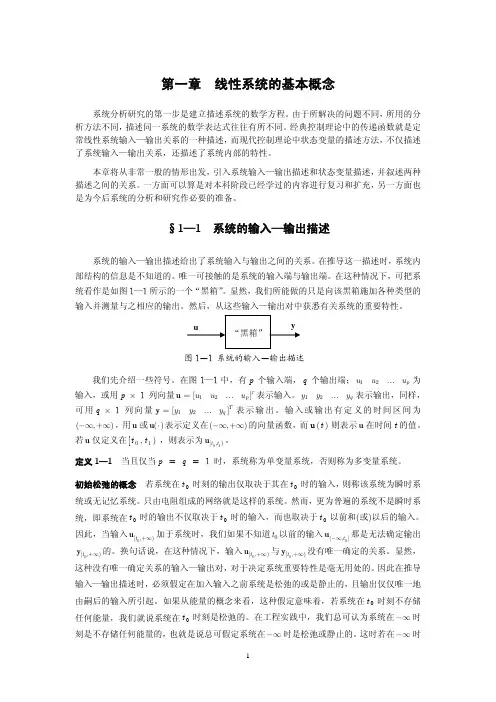
第一章线性定常系统的状态空间描述及运动分析1.1 线性定常系统的传递函数描述传递函数描述局部的,有局限性的描述传递函数描述的是系统的输入--输出关系,即假定对系统结构的内部信息一无所知,只能得到系统的输入信息和输出信息,系统内部结构就像一个"黑箱"一样,因此,传递函数只能刻画系统的输入--输出特性,它被称为系统的输入--输出描述和外部描述.常用的数学工具:拉普拉斯变换主要适用于描述线性定常系统1.单变量情形回顾已知由下列常系数微分方程描述的定常系统其中 : 系统的输出 ; :系统的输入; : 时间; 均为常数 ,(希望input少,收益大)假定所有初始值(包括导数的值)全为0,对上式两边取拉普拉斯变换,得到其中为的拉普拉斯变换,则下式称为系统的传递函数 :传递函数为的真有理分式,则称系统为物理能实现的. 单输入--单输出系统的传递函数必为真有理分式.系统的特征多项式: 多项式系统的特征方程 : 代数方程系统的极点 : 特征方程的根或者说特征方程的零点系统的零点 : 多项式的零点传递函数的零点和极点 : 零极相消后剩下的系统的零点和极点 (若系统有相同的零点和极点,则称系统有零极点相消)2.传递函数矩阵考察多输入--多输出的线性定常系统.令输入变量组 : {} , 输出变量组 : {} 且假定系统的初始变量为 0 .用和分别表示和的拉普拉斯变换, 表示系统的由第个输入端到第个输出端的传递函数,其中则由系统的线性属性(即满足叠加原理) 可以导出:称由上式所定义的为系统的传递函数矩阵. 容易看出, 为的一个有理分式矩阵. 当的元传递函数除严格真还包含真有理分式时,即它的一个或一些元传递函数中分母和分子多项式具有相等的最高幂次时,称为真有理分式矩阵.通常,当且仅当为真的或严格真的时,它才是物理上可实现的.作为一个判别准则,当且仅当零阵时, 为严格真的;非零常阵传递函数矩阵为真的.1.2 线性定常系统的状态空间描述1. 状态和状态空间定义1.1 动力学系统的状态定义为完全的表征系统时间域行为的一个最小内部变量组.组成这个变量组的变量称为系统的状态变量,其中为初始时刻由初始变量构成的列向量称为系统的状态向量,简称为状态.状态空间则定义为状态向量取值的一个向量空间.几点解释:1. 状态向量组可完全的表征系统行为的属性.2. 状态变量组的最小性.3. 状态变量组在数学上的特征.4. 状态变量组包含了系统的物理特征.5. 状态变量组选取上的不唯一性定理1.1 系统任意选取的两个状态变量组之间为线性非奇异的关系2.动态系统的状态空间描述和输入--输出描述不同,状态空间描述中把系统动态过程的描述考虑为一个更加细致的过程,输入引起系统状态的变化,而状态和输入则决定了输出的变化."输入"引起"状态"的变化 ( 一个运动的过程)数学上必须采用微分方程或差分方程来表征并且称这个数学方程为系统的状态方程考虑最为一般的连续动态过程: (一个一阶非线性时变微分方程组)进而,在引入向量表示的基础上,还可将状态方程简洁的表示为向量方程的形式:其中"状态"和"输入"决定"输出"的变化 (一个变量见的转换过程)描述这种转换过程的数学表达式为变换方程,并且称之为系统的输出方程或量测方程.最一般的,一个连续的动力学系统的输出方程具有以下形式:表示为向量方程的形式为其中系统的状态空间描述由状态方程和输出方程组成.离散动态过程(离散系统)的状态空间的描述: 只在离散时刻取值,用来表示其状态空间过程描述只反映离散时刻的变量组间的因果关系和转换关系.通常,可采用两条可能的途径来组成系统的状态空间描述:一是分析途径,适用于结构和参数已知的系统;二是辨识的途径,适用于结构和参数难于搞清楚的系统.3.线性定常系统的状态空间描述限于考虑线性定常系统的连续动态过程,此时,向量函数将都具有线性的关系,且不显含时间 .从而线性定常系统的状态空间描述的表达式为其中维状态向量维控制输入向量维输出向量系统矩阵输入矩阵输出矩阵前馈矩阵以上统称为系统的系数矩阵,均为实常阵.线性定常系统也叫做线性时不变系统(linear time-invariant L TI),完全由系数矩阵决定.简记为.对于线性定常系统,我们分别称系统矩阵的特征值,特征向量,若尔当标准型,特征方程,特征多项式为系统的特征值,特征向量,若尔当标准型,特征方程,特征多项式,系统的特征值也称作系统的极点.若,则此系统为单输入线性定常系统;若,此系统为单输出线性定常系统;若,此系统为单输入--单输出系统,或单变量系统.考虑线性定常离散系统的状态空间描述,其一般形式为其中维状态向量维控制输入向量维输出向量阶实常系数矩阵简记为1.3 输入输出描述导出状态空间描述------------- 系统的实现问题(第五章详解)考虑单输入--单输出线性定常系统.表征此系统动态过程的输入-输出描述,时域为或等价的频域描述即传递函数其中和分别表示和的拉普拉斯变换对于由上式描述的系统,可以引进状态变量 ,将其写成状态空间描述形式,其中为维状态变量分别为的常矩阵由"上"写成"下",称为实现问题,实现不具有唯一性1. 当时,有如下结论:定理1.2 给定单输入--单输出线性定常系统的输入输出描述如"上",当时,其对应的一个状态空间描述为:2. 当时,已知"上"求其状态空间描述.先求极限然后令为严格真,直接按的形式写出即可.3. 当时, 此时输入输出关系为此时状态空间描述形式为:1.4 由状态空间描述导出的传递函数矩阵对于多输入--多输出线性定常系统,传递函数矩阵是表征系统输入输出特性的最基本的形式.1. 传递函数矩阵的表示的基本表达式定理1.3 对应于状态空间描述的传递函数矩阵为并且 ,当时, 为真的 , 时, 为严格真的,且有2.的实用关系式有给出的关系式在理论分析上很重要,但从计算的角度而言不方便,下面给出由计算的两个实用算式.定理1.4 给定状态空间描述的系数矩阵 , 求出则相应的传递函数矩阵可表示为注: 的根 : 系统的极点 ; 分子的根 : 系统的零点推论1.1 若的最小多项式为则系统的传递函数矩阵可表示为2. 脉冲响应矩阵和状态空间描述定理1.11 线性定常系统其中的实常阵的脉冲响应矩阵为将其写作更为常用的形式定理1.12 两个代数等价的线性定常系统具有相同的脉冲响应矩阵.定理1.13 两个代数等价的线性定常系统具有相同的输出零状态响应和输出零输入响应.3. 脉冲响应矩阵和传递函数矩阵定理1.14 分别表示线性定常系统的脉冲响应矩阵和传递函数矩阵,则有推论1.2 给定两个线性定常系统 ,设两者都具有相同的输入和输出维数,状态维数不一定相同,则两系统具有相同的脉冲响应矩阵(即相同的传递函数矩阵)的充要条件为1.8 线性定常离散系统的运动分析归结为对定常的线性差分方程进行求解.1. 线性定常离散系统的运动规律对于上述系统,其状态运动的表达式为或2. 脉冲传递函数矩阵取初始状态 , 则可得到系统的输入输出关系式为其中为线性定常离散系统的传递函数矩阵, 按习惯称为脉冲传递函数矩阵.G(z) 为 z 的有理分式矩阵,通常只讨论其为真的或严格真的情况,此时 G(z) 为物理可实现的. 1.9 线性定常系统的时间离散化1. 问题的提出把连续时间系统化为等价的离散时间系统的问题. (课本P22 或百度文库)2.线性定常系统按采样周期T的离散化线性定常系统引入三点基本假设,以保证系统离散化后的描述简单,且是可复原的1. 采样器的采样方式取为以常数 T 为周期的等间隔采样. 采样瞬时为2. 保持器为零阶的.3. 采样周期的值要满足香农(Shannon)采样定理所给出的条件香农定理:离散信号可以完满地复原为原来的连续信号的条件为采样频率满足.考虑到 , 故上式可化为定理1.15 上述系统的时间离散化模型为其中注 :定理1.15提供了线性定常连续系统时间离散化的算法, 离散化系统仍为定常系统.不管A是否奇异,离散化后系统矩阵G一定是非奇异的.。
线性系统理论线性系统理论是一个广泛应用的数学分支,该分支研究线性系统的性质、行为和解决方案。
线性系统可以描述很多现实世界中的问题,包括电子、机械、化学和经济系统等。
在这篇文章中,我们将探讨线性系统理论的基础、应用、稳定性和控制等不同方面。
一、线性系统基础线性系统是一种对于输入响应线性的系统。
当输入为零时,系统的响应为零,称之为零输入响应。
当没有外界干扰时,系统内部存在固有的动态响应,称之为自然响应。
当有外界输入时,系统将对输入做出响应,称之为强制响应。
线性系统具有很多性质,可以让我们更好地理解系统的行为。
其中一个重要的性质是线性可加性,就是说当输入是线性可加的时候,输出也是线性可加的。
换句话说,如果我们有两个输入信号,将它们分别输入到系统中,我们可以在系统的输出中将它们加起来,并得到对应的输出信号。
另外一个重要的性质是时不变性,就是说当输入信号的时间变化时,输出信号的时间变化也会随之发生。
这个性质告诉我们,系统的行为不随着时间的改变而改变。
除此之外,线性系统还有其他很多性质,比如可逆性、稳定性、因果性等等。
二、线性系统的应用线性系统有着广泛的应用,它们可以用来描述很多各种各样的问题,包括但不限于电子电路、航天控制、化学反应、经济系统等等。
下面我们来看看这些应用领域中的具体案例。
1. 电子电路线性系统在电子电路中有着广泛应用。
例如,如果我们想要设计一个低通滤波器,以使高频信号被抑制,我们可以使用线性系统来描述它的行为。
我们可以将电子电路看作一个输入信号到输出信号的转换器。
这个转换器的输出信号可以通过控制电子器件的电流、电压等参数来实现。
这种线性系统可以用来滤掉任何频率的信号,因此在广播和通信中也有广泛的应用。
2. 航天控制航天控制是线性系统理论的一个应用重点。
它包括控制飞行器姿态、轨道以及动力学行为。
在这些问题中,线性可变系统被广泛应用。
这种系统的输出信号是受到飞行器的控制和环境因素的影响。
控制器的任务是计算信号,以引导飞行员和总体系统实现期望的性能和特征。
线性系统理论Linear System Theory 1-1 状态空间的基本概念例1-1 图示RLC 网络。
设:u i 为输入变量;u o =u c 为输出变量。
2 状态空间描述中常用的基本概念例1-1 图示RLC 网络。
设:u i 为输入变量;u o =u c 为输出变量。
用矩阵表示状态空间表达式:⎪⎨+−−=u x R x x 11&1-2 线性连续系统状态空间表达式的建立1......)((b s b s b s b s Y G n n ++++−1 N(s)/D(s)的串联分解——可控标准型实现x&x x⎤⎡⎡00010L &状态变量图例1-5 已知系统微分方程:u u T y y y +=ω+ωζ+试求系统的状态空间表达式,并绘制该系统的状态变量图。
21u x x x+ζω−ω−=22&2 可观测标准型实现设可控标准型实现为例1-6 已知系统微分方程:试求可观测标准型实现,并绘制其状态变量图。
3 并联分解——Jordan标准型实现⎤⎡−s L 0001ss s s U s G 89)()(23++==例1-7 已知某系统传递函数:⎡1⎤4 矩阵的特征方程、特征值1)方阵2 线性定常连续系统状态方程的求解2-1 齐次状态方程的解⎢⎣⎥⎦⎢⎣−−=⎥⎦⎢⎣22x 32x &解:用拉氏变换的方法:例2-1 求已知状态方程的状态转移矩阵。
2-2 状态转移矩阵的性质例2-2 已知状态转移矩阵,求Φ-1和系统矩阵A。
性质9 若例2-3已知系统矩阵,求状态转移矩阵及其状态转移矩阵的逆。
非齐次状态方程:例2-4 已知状态空间描述及零初始条件,输入为单位阶跃,求状态方程的解SISO系统:例9-29 已知系统动态方程,试求系统的传递矩阵。
⎡x&9-4-2开环与闭环传递矩阵MIMOU(s)E(s)Y(s)由图可知:3-1 线性系统的可控性与可观性3-1-1 问题的提出例3-2 已知系统状态空间表达式,⎧3-2 可控性问题基本概念考虑线性系统:3-3 可观测性的基本概念3-4 线性定常系统可控性判据考虑线性定常系统:例3-3 判断已知系统的可控性。