1绪论:现代控制理论的产生与发展
- 格式:ppt
- 大小:1.77 MB
- 文档页数:36

现代控制理论的产生、发展、内容、研究方法和应用经典控制理论与现代控制理论的差异建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分。
在现代控制理论中,对控制系统的分析和设计主要是通过对系统的状态变量的描述来进行的,基本的方法是时间域方法。
现代控制理论比经典控制理论所能处理的控制问题要广泛得多,包括线性系统和非线性系统,定常系统和时变系统,单变量系统和多变量系统。
它所采用的方法和算法也更适合于在数字计算机上进行。
现代控制理论还为设计和构造具有指定的性能指标的最优控制系统提供了可能性。
现代控制理论的名称是在1960年以后开始出现的,用以区别当时已经相当成熟并在后来被称为经典控制理论的那些方法。
现代控制理论已在航空航天技术、军事技术、通信系统、生产过程等方面得到广泛的应用。
现代控制理论的某些概念和方法,还被应用于人口控制、交通管理、生态系统、经济系统等的研究中。
现代控制理论是在20世纪50年代中期迅速兴起的空间技术的推动下发展起来的。
空间技术的发展迫切要求建立新的控制原理,以解决诸如把宇宙火箭和人造卫星用最少燃料或最短时间准确地发射到预定轨道一类的控制问题。
这类控制问题十分复杂,采用经典控制理论难以解决。
1958年,苏联科学家Л.С.庞特里亚金提出了名为极大值原理的综合控制系统的新方法。
在这之前,美国学者R.贝尔曼于1954年创立了动态规划,并在1956年应用于控制过程。
他们的研究成果解决了空间技术中出现的复杂控制问题,并开拓了控制理论中最优控制理论这一新的领域。
1960~1961年,美国学者R.E.卡尔曼和R.S.布什建立了卡尔曼-布什滤波理论,因而有可能有效地考虑控制问题中所存在的随机噪声的影响,把控制理论的研究范围扩大,包括了更为复杂的控制问题。
几乎在同一时期内,贝尔曼、卡尔曼等人把状态空间法系统地引入控制理论中。
状态空间法对揭示和认识控制系统的许多重要特性具有关键的作用。
其中能控性和能观测性尤为重要,成为控制理论两个最基本的概念。

现代控制理论的发展概况传统的控制理论是在 20 世纪 30 到 40 年代,奈奎斯特、伯德、维纳等人的著作为自动控制理论的初步形成而奠定了基础的。
而由于航空航天技术的推动与计算机技术飞速发展,控制理论在 1960 年先后有了重大的突破与创新。
在此期间,由卡尔曼提出的线性控制系统的状态空间法、能控性与能观测性的概念,奠定了现代控制理论的基础,其提出的卡尔曼滤波,在随机控制系统的分析与控制中得到广泛应用;庞特里亚金等人提出了极大值原理,深入研究了最优控制问题;由贝而曼提出最优控制的动态规划法,广泛用于各类最优控制问题。
这些就构成为了后来被称为现代控制理论的发展起点与基础。
罗森布洛克、麦克法轮与欧文斯研究了使用于计算机辅助控制系统设计的现代频域法理论,将经典控制理论传递函数的概念推广到多变量系统,并探讨了传递函数矩阵与状态方程之间的等价转换关系,为进一步建立统一的线性系统理论奠定了基础。
20 世纪 70 年代奥斯特隆姆与朗道在自适应控制理论与应用方面作出了贡献。
与此同时,关于系统辨识、最优控制、离散时间系统与自适应控制的发展大大丰富了现代控制理论的内容。
鲁棒控制理论阶段:由于现代数学的发展,结合着 H2 与H¥等范数而浮现了 H2 与H¥控制,还有逆系统控制等方法。
20 世纪 70 年代末,控制理论向着“大系统理论”、“智能控制理论”与“复杂系统理论”的方向发展。
“大系统理论”:用控制与信息的观点,研究各种大系统的结构方案、总体设计中的分解方法与协调等问题的技术基础理论。
“ 智能控制理论”:研究与摹拟人类智能活动及其控制与信息传递过程的规律,研制具有某些拟人智能的工程控制与信息处理系统的理论。
“复杂系统理论”:把系统的研究拓广到开放复杂巨系统的范筹,以解决复杂系统的控制为目标。
而“现代控制理论”这一名称是 1960 年卡尔曼的著名文章发表后浮现的,其在经典控制理论的基础上,以线性代数与微分方程为主要的数学工具,以状态空间法为基础,分析与设计控制系统。
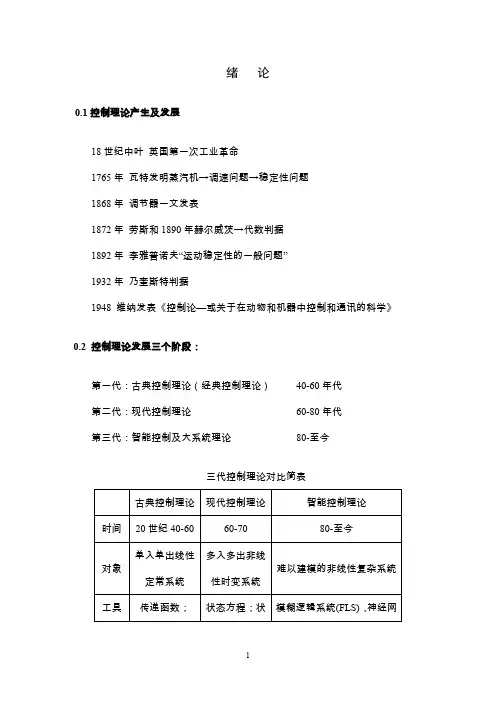
绪论0.1控制理论产生及发展18世纪中叶英国第一次工业革命1765年瓦特发明蒸汽机→调速问题→稳定性问题1868年调节器一文发表1872年劳斯和1890年赫尔威茨→代数判据1892年李雅普诺夫“运动稳定性的一般问题”1932年乃奎斯特判据1948 维纳发表《控制论—或关于在动物和机器中控制和通讯的科学》0.2 控制理论发展三个阶段:第一代:古典控制理论(经典控制理论)40-60年代第二代:现代控制理论60-80年代第三代:智能控制及大系统理论80-至今三代控制理论对比简表0.3 智能控制的产生及发展20世纪60年代 Smith 用模式识别器用于最优控制1965年 Zadeh 发表模糊集合论文,付京孙讲人工智能用于学习控制 1976年 Mendel 提出人工智能概念—智能控制70年代初 傅京孙、Gloriso 和Saridis 等人提出递阶智能控制的系统结构 1974年 马丹尼提出世界上第一个模糊控制器(fuzzy logic controller) 20世纪80年代初 建立了多种专家系统20世纪80年代中后期 神经网络的研究又开始兴起 1992年 美国自然基金启动支持“智能控制”的研究0.4 传统控制与智能控制结论:智能控制理论是对传统控制理论的发展,传统控制理论是智能控制理论的低级阶段。
0.5 智能控制论控制三要素: 信息—反馈—控制 智能控制——智能信息反馈控制图0.1 反馈控制系统的原理框图0.6思维科学与智能模拟1. 什么是思维科学研究思维规律和方法的科学。
思维是意识的一部分,而且是最重要的部分,思维是人脑对客观事物间接的反映过程,包括回想、联想、想像、思考、推想等。
人们通过思维活动反映客观事物的特点、本质属性、内部联系及发展规律。
因此思维是人们认识过程的高级阶段。
2.思维的类型(1) 抽象思维(逻辑思维):抽去表象的思维,例如小学生的算数。
(2)形象思维(直觉思维):既看形又看象的思维。
《现代控制理论》教案大纲第一章:绪论1.1 课程背景与意义1.2 控制系统的基本概念1.3 控制理论的发展历程1.4 控制理论的应用领域第二章:控制系统数学模型2.1 连续控制系统数学模型2.2 离散控制系统数学模型2.3 状态空间描述2.4 系统矩阵的性质与运算第三章:线性系统的时域分析3.1 系统的稳定性3.2 系统的瞬时性3.3 系统的稳态性能3.4 系统的动态性能第四章:线性系统的频域分析4.1 频率响应的概念4.2 频率响应的性质4.3 系统频率响应的求取方法4.4 系统频域性能指标第五章:线性系统的校正与设计5.1 系统校正的基本概念5.2 常用校正器及其特性5.3 系统校正的方法5.4 系统校正实例分析第六章:非线性控制系统分析6.1 非线性系统的基本概念6.2 非线性系统的数学模型6.3 非线性系统的稳定性分析6.4 非线性系统的控制策略第七章:状态反馈与观测器设计7.1 状态反馈控制的基本原理7.2 状态反馈控制器的设计方法7.3 观测器的设计与分析7.4 状态反馈控制系统应用实例第八章:先进控制策略8.1 鲁棒控制8.2 自适应控制8.3 最优控制8.4 智能控制第九章:最优控制理论9.1 最优控制的基本概念9.2 线性二次调节器(LQR)9.3 离散时间最优控制9.4 最优控制的应用第十章:现代控制理论在工程应用10.1 现代控制理论在自动化领域的应用10.2 现代控制理论在控制中的应用10.3 现代控制理论在航空航天领域的应用10.4 现代控制理论在其他领域的应用第十一章:鲁棒控制理论11.1 鲁棒控制的基本概念11.2 鲁棒控制的设计方法11.3 鲁棒控制的应用实例11.4 鲁棒控制在实际系统中的性能评估第十二章:自适应控制理论12.1 自适应控制的基本概念12.2 自适应控制的设计方法12.3 自适应控制的应用实例12.4 自适应控制在复杂系统中的应用与挑战第十三章:数字控制系统设计13.1 数字控制系统的概述13.2 数字控制器的设计方法13.3 数字控制系统的仿真与实验13.4 数字控制系统在实际应用中的案例分析第十四章:控制系统中的计算机辅助设计14.1 计算机辅助设计的基本概念14.2 控制系统CAD工具与方法14.3 基于软件的控制系统设计与仿真14.4 控制系统CAD在现代工程中的应用案例第十五章:现代控制理论的前沿与发展15.1 现代控制理论的最新研究动态15.2 控制理论与其他领域的交叉融合15.3 未来控制理论的发展趋势15.4 控制理论在解决现实世界问题中的潜力与挑战重点和难点解析本《现代控制理论》教案大纲涵盖了现代控制理论的基本概念、方法与应用,分为十五个章节。