全维状态观测器的设计
- 格式:doc
- 大小:82.00 KB
- 文档页数:9

实验报告课程践性系统理抡基碣实验日期2016年6月6日 专业册级学号同组人 实验名称全维狀盗现測器的投廿坪分 批阅敎斷签字一、实鲨目的1. 学习用状态观测器获取系统状态IS it li ft 方法,了解全细状态观测器的 根点对状态的估it 误差的靈响;2. 拿捋全维状态观測器的设it 方法;3. 拿捋带有狀态规測器的状态反饋系躱设廿方法。
二、实验容a ) 用状态反馈配置系説的用环根点:一2±丿・2朽,一5;b ) 设廿全细狀态规測器,规测器的极点为:一5±/2巧,一10;0研究规测器tUE 置对估计状态逼近被估it 值的影响; d )求系统的传递函数(带规测器及不帑观测器时);绘制系躱的输出阶跃响应曲线。
三. 实螫环境MATLAB6.5・01 o'oA =0 0 1,b = 0-6-1161c = p 0 0]开环系统x = Ax + bu y = ex0.实验眾理(或程序框图)及步驟利用状态反饋可以便闭环系就的根点配置在所希里的位置上,以条件是必须对全部状态变量邵能iSliH量,但在实际系统中,并不是所有狀盗变量那能测量的,这就给狀态反锁的实现it成了困难。
SUtl设法利用已*11的信息(输岀量y和输人量x),通过一个模塑車新构适系貌状态以对状态变量进fiIfiito该模塑就枕为狀态规測器。
若状态观测器的阶次与系貌的阶次是曲同的,这样的状态规汹器就祢力全维狀态观测器或全阶观測器。
设系説完全可观,剧可fiiia图4"所示的狀态规测器图4-1全维状态範測器为求岀状态焜测器的反備ke熾益,与板点配置类做,也可有两种方法:方法一:构造变换矩阵Q,便系统变成标旌能规里,然后根齬特征方程求HI ke;方法二:是可采用Ackermann公式:& =①(A)Q:[o 0・・・0 if, 其中0。
力可规性矩眸。
利用对偶原理,可便设廿冋题大为简化。
首先构造对偶系貌然后可由变换沫或Ackermann公式求岀様点配置的反馈k增益,逹也可由MATLAB的place和acker函数得到;晟后求出狀态规测器的反饋增益。
现代控制实验--状态反馈器和状态观测器的设计-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN状态反馈器和状态观测器的设计一、实验设备PC 计算机,MATLAB 软件,控制理论实验台,示波器二、实验目的(1)学习闭环系统极点配置定理及算法,学习全维状态观测器设计法;(2)掌握用极点配置的方法(3)掌握状态观测器设计方法(4)学会使用MATLAB工具进行初步的控制系统设计三、实验原理及相关知识(1)设系统的模型如式所示若系统可控,则必可用状态反馈的方法进行极点配置来改变系统性能。
引入状态反馈后系统模型如下式所示:(2)所给系统可观,则系统存在状态观测器四、实验内容(1)某系统状态方程如下10100134326x x u •⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎣⎦[]100y x =理想闭环系统的极点为[]123---.(1)采用 Ackermann 公式计算法进行闭环系统极点配置;代码:A=[0 1 0;0 0 1;-4 -3 -2];B=[1; 3; -6];P=[-1 -2 -3];K=acker(A,B,P)Ac=A-B*Keig(Ac)(2)采用调用 place 函数法进行闭环系统极点配置;代码:A=[0 1 0;0 0 1;-4 -3 -2];B=[1;3;-6];eig(A)'P=[-1 -2 -3];K=place(A,B,P)eig(A-B*K)'(3)设计全维状态观测器,要求状态观测器的极点为[]---123代码:a=[0 1 0;0 0 1;-4 -3 -2];b=[1;3;-6];c=[1 0 0];p=[-1 -2 -3];a1=a';b1=c';c1=b';K=acker(a1,b1,p);h=(K)'ahc=a-h*c(2)已知系统状态方程为:10100134326x x u •⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎣⎦[]100y x =(1)求状态反馈增益阵K ,使反馈后闭环特征值为[-1 -2 -3];代码:A=[0 1 0;0 0 1;4 -3 -2];b=[1;3;-6];p=[-1 -2 -3];k=acker(A,b,p)A-b*keig(A-b*k)(2)检验引入状态反馈后的特征值与希望极点是否一致。
全维状态观测器的设计全维状态观测器(Full State Observer)是一种常用于控制系统中的重要部件,用于获取系统的全部状态信息。
它通常是通过对系统的输入输出进行观测,并通过数学模型来估算系统的状态。
全维状态观测器的设计可以通过以下步骤来完成。
第一步是系统建模。
将所要观测的系统建立数学模型,可以采用物理方程或者数学模型的方式。
常见的数学模型包括状态方程和输出方程。
状态方程描述了系统状态的时间演变规律,输出方程则描述了系统输出与状态之间的关系。
这些方程可以通过系统的运动方程,控制方程和物理特性等来建立。
第二步是选择观测器类型。
全维状态观测器有多种类型,包括基本观测器、极点配置观测器和最优观测器等。
基本观测器是使用系统的状态方程和输出方程来估算系统状态的观测器,而极点配置观测器和最优观测器则是通过最小化误差来估算系统状态,从而提高观测器的精度。
合适的观测器类型应该根据控制系统的需求来选择。
第三步是计算观测器矩阵。
观测器矩阵是观测器中用来计算系统状态的矩阵。
它可以使用系统的状态方程和输出方程来计算。
观测器矩阵需要满足一些性质,例如它需要是可观测的,并且需要保证系统状态与观测器状态的误差最小。
第五步是实现观测器。
实现观测器需要将观测器矩阵和观测器增益输入到观测器中,并对观测器的输入输出进行校验。
一旦观测器被设计并实现,它就可以用于控制系统中,并用来估算系统的全部状态信息。
总之,全维状态观测器的设计是控制系统中的重要部件,可以极大地提高控制系统的精度和稳定性。
设计一个好的全维状态观测器需要仔细分析系统模型和观测器类型,计算观测器矩阵和观测器增益,并进行实现和调试。

本科实验报告课程名称:现代控制理论实验项目:状态反馈和状态观测器的设计实验地点:中区机房专业班级:自动化学号:学生:指导教师:年月日现代控制理论基础一、实验目的(1)熟悉和掌握极点配置的原理。
(2)熟悉和掌握观测器设计的原理。
(3)通过实验验证理论的正确性。
(4)分析仿真结果和理论计算的结果。
二、实验要求(1)根据所给被控系统和性能指标要求设计状态反馈阵K。
(2)根据所给被控系统和性能指标要求设计状态观测器阵L。
(3)在计算机上进行分布仿真。
(4)如果结果不能满足要求,分析原因并重复上述步骤。
三、实验容(一)、状态反馈状态反馈是将系统的状态变量乘以相应的反馈系数,然后反馈到输入端与参考输入叠加形成控制作为受控系统的控制输入,采用状态反馈不但可以实现闭环系统的极点任意配置,而且也是实现解耦和构成线性最优调节器的主要手段。
1.全部极点配置给定控制系统的状态空间模型,则经常希望引入某种控制器,使得该系统的闭环极点移动到某个指定位置,因为在很多情况下系统的极点位置会决定系统的动态性能。
假设系统的状态空间表达式为(1)其中 n m C r n B n n A ⨯⨯⨯::;:;: 引入状态反馈,使进入该系统的信号为Kx r u -=(2)式中r 为系统的外部参考输入,K 为n n ⨯矩阵. 可得状态反馈闭环系统的状态空间表达式为(3)可以证明,若给定系统是完全能控的,则可以通过状态反馈实现系统的闭环极点进行任意配置。
假定单变量系统的n 个希望极点为λ1,λ2, …λn, 则可以求出期望的闭环特征方程为=)(*s f (s-λ1)(s-λ2)…(s-λn)=n n n a s a s +++- 11这是状态反馈阵K 可根据下式求得K=[])(100*1A f U c -(4)式中[]b A Ab b U n c 1-= ,)(*A f 是将系统期望的闭环特征方程式中的s 换成系统矩阵A 后的矩阵多项式。
例1已知系统的状态方程为u x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=•111101101112 采用状态反馈,将系统的极点配置到-1,-2,-3,求状态反馈阵K..其实,在MATLAB的控制系统工具箱中就提供了单变量系统极点配置函数acker(),该函数的调用格式为K=acker(A,b,p)式中,p为给定的极点,K为状态反馈阵。
实验八 状态反馈与状态观测器的工程应用一、实验目的1、对一个实际系统,建立该系统的数学模型,了解模型线性化的方法,最终获得 系统的状态空间描述,并对系统进行稳定性,能控性,能观性检查。
2、根据控制要求,采用极点配置方法设计状态反馈控制器,并利用全维状态观测 器来实现状态反馈。
二、实验要求1、 对实验系统进行稳定性,能控性及能观性检查2、 用状态反馈方法使起重机系统按期望速度到达B 点3、 全维状态观测器的设计4、 观测器的引入对闭环系统的影响三、实验内容为研究起重机的防摆控制问题,需对实际问题进行简化、抽象。
起重机的“搬运—行走—定位”过程可以抽象为如图2.1所示的情况,即起重机在受到外力F 作用下,能够在较短时间内从A 点运动到B 点,且摆角不超过系统允许的最小摆角。
图中m 是重物的质量(kg );m 0为起重机的质量(kg ),g 为重力加速度(m/s 2),F 为小车受到水平方向上的拉力(N),l为绳长,此处假设绳长保持不变。
考虑到实际起重机运行过程中摆角较小(不超过10o),且平衡位置θ = 0,因此在sin θ ≈θ , cos θ ≈ 1, θ2sin θ ≈ 0的近似条件下的起重机系统的简化模型如图2.2所示图2.1 起重机受力分析过程 图2.2 起重机系统的简化模型选取小车的位移x 及其速度x θ及角速度θ作为状态变量,x 为输出变量。
假设系统参数为m 0=50kg , m=5kg ,l=1m, g=9.8m/s 2,则可以列出起重机系统的状态空间表达形式。
由此模型可知,拉力F 为输入变量,所以对于此系统,G(s)=X(s)F(s) = S^2+9.850S^4+539S^2利用MatLab可从传递函数中由G(S)求出状态方程的A,B,C,D >> num=[0 1 0 9.8]; den=[50 0 539 0 0]den =50 0 539 0 0>> [A,B,C,D]=tf2ss(num,den)A =0 -10.7800 0 01.0000 0 0 00 1.0000 0 00 0 1.0000 0B =1C =0 0.0200 0 0.1960D =(1)判断系统稳定性建立m文件,命名为Untiled2,程序:lambda=eig(A);for i=1:length(lambda)if lambda(i)>=0disp('The system is unstable');returnendenddisp('The system is stable');运行结果为:>> Untitled2The system is unstable所以这个系统是不稳定的。
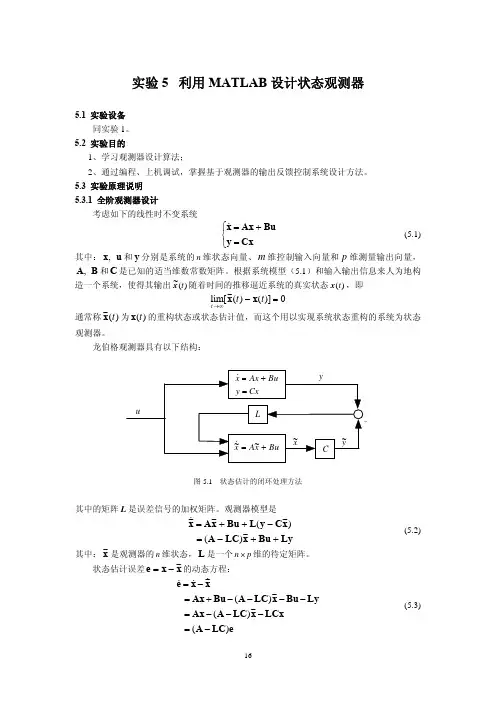
状态观测器设计利用状态反馈实现闭环系统的极点配置,需要利用系统的全部状态变量。
然而系统的状态变量并不都是能够易于用物理方法量测出来的,有些根本就无法量测;甚至一些中间变量根本就没有常规的物理意义。
此种情况下要在工程上实现状态反馈,就需要对系统的状态进行估计,即构造状态观测器。
状态观测器,是一个在物理上可以实现的动态系统,它利用待观测系统的可以量测得到的输入和输出信息来估计待观测系统的状态变量,以便用该组状态变量的估计值来代替待观测系统的真实状态变量进行状态反馈设计,实现闭环系统极点的再配置。
1. 全维状态观测器当对象的所有状态均不可直接量测时,若要进行状态反馈设计,就需对全部状态变量进行观测。
这时构造的状态观测器,其阶次与对象的阶次相同,被称为全维状态观测器。
考虑如下n阶单输出线性定常离散系统(1)其中,A为n×n维系统矩阵,B为n×r输入矩阵,C为n×1维输出矩阵。
系统结构图如图1所示。
图1 全维状态观测器构造一个与受控系统具有相同参数的动态系统(2)当系统(1)与(2)的初始状态完全一致时,则两个系统未来任意时刻的状态也应完全相同。
但在实际实现时,不可能保证二者初始状态完全相同。
为此,应引入两个系统状态误差反馈信号构成状态误差闭环系统,通过极点配置使误差系统的状态渐趋于零。
由于原受控系统状态不可直接量测,故用二个系统的输出误差信号代替。
引入了输出误差的状态观测器状态方程为(3)其中,H为状态观测器的输出误差反馈系数矩阵,有如下形式定义状态估计误差为,用式(7.65)与(7.67)相减可得(4)即(5)通过式(5)可以看出,若选择合适的输出误差反馈矩阵H 使得状态估计误差系统(5)的所有极点均位于z平面单位圆内,则误差可在有限拍内趋于零,即状态估计值在有限拍内可以跟踪上真实状态,且极点越靠近原点状态估计误差趋于零的速度越快,反之越慢。
可见,能否逼近x(k)以及逼近速度是由H阵决定的。
实 验 报 告课程 线性系统理论基础 实验日期 2016年 6月 6 日 专业班级 姓名 学号 同组人 实验名称全维状态观测器的设计评分批阅教师签字一、实验目的1. 学习用状态观测器获取系统状态估计值的方法,了解全维状态观测器的极点对状态的估计误差的影响;2. 掌握全维状态观测器的设计方法;3. 掌握带有状态观测器的状态反馈系统设计方法。
二、实验内容开环系统⎩⎨⎧=+=cxy bu Ax x,其中[]0100001,0,10061161A b c ⎡⎤⎡⎤⎢⎥⎢⎥===⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦a) 用状态反馈配置系统的闭环极点:5,322-±-j ; b) 设计全维状态观测器,观测器的极点为:10,325-±-j ; c) 研究观测器极点位置对估计状态逼近被估计值的影响; d) 求系统的传递函数(带观测器及不带观测器时);绘制系统的输出阶跃响应曲线。
三、实验环境 MATLAB6.5四、实验原理(或程序框图)及步骤利用状态反馈可以使闭环系统的极点配置在所希望的位置上,其条件是必须对全部状态变量都能进行测量,但在实际系统中,并不是所有状态变量都能测量的,这就给状态反馈的实现造成了困难。
因此要设法利用已知的信息(输出量y 和输入量x),通过一个模型重新构造系统状态以对状态变量进行估计。
该模型就称为状态观测器。
若状态观测器的阶次与系统的阶次是相同的,这样的状态观测器就称为全维状态观测器或全阶观测器。
设系统完全可观,则可构造如图4-1所示的状态观测器图4-1 全维状态观测器为求出状态观测器的反馈ke 增益,与极点配置类似,也可有两种方法: 方法一:构造变换矩阵Q ,使系统变成标准能观型,然后根据特征方程求出k e ;方法二:是可采用Ackermann 公式:[]Toe Q A k 1000)(1-Φ=,其中O Q 为可观性矩阵。
利用对偶原理,可使设计问题大为简化。
首先构造对偶系统⎩⎨⎧=+=ξηξξTT T b v c A 然后可由变换法或Ackermann 公式求出极点配置的反馈k 增益,这也可由MATLAB 的place 和acker 函数得到;最后求出状态观测器的反馈增益。
状态反馈器与状态观测器得设计一、实验设备PC 计算机,MATLAB 软件,控制理论实验台,示波器二、实验目得(1)学习闭环系统极点配置定理及算法,学习全维状态观测器设计法;(2)掌握用极点配置得方法(3)掌握状态观测器设计方法(4)学会使用MATLAB工具进行初步得控制系统设计三、实验原理及相关知识(1)设系统得模型如式所示若系统可控,则必可用状态反馈得方法进行极点配置来改变系统性能。
引入状态反馈后系统模型如下式所示:(2)所给系统可观,则系统存在状态观测器四、实验内容(1)某系统状态方程如下理想闭环系统得极点为、(1)采用 Ackermann 公式计算法进行闭环系统极点配置; 代码:A=[0 1 0;0 0 1;4 3 2];B=[1; 3; 6];P=[1 2 3];K=acker(A,B,P)Ac=AB*Keig(Ac)(2)采用调用 place 函数法进行闭环系统极点配置; 代码:A=[0 1 0;0 0 1;4 3 2];B=[1;3;6];eig(A)'P=[1 2 3];K=place(A,B,P)eig(AB*K)'(3)设计全维状态观测器,要求状态观测器得极点为代码:a=[0 1 0;0 0 1;4 3 2];b=[1;3;6];c=[1 0 0];p=[1 2 3];a1=a';b1=c';c1=b';K=acker(a1,b1,p);h=(K)'ahc=ah*c(2)已知系统状态方程为:(1)求状态反馈增益阵K,使反馈后闭环特征值为[1 2 3]; 代码:A=[0 1 0;0 0 1;4 3 2];b=[1;3;6];p=[1 2 3];k=acker(A,b,p)Ab*keig(Ab*k)(2)检验引入状态反馈后得特征值与希望极点就是否一致。
(3)比较状态反馈前后得系统阶跃响应。
代码:A1=[0 1 0;0 0 1;4 3 2];B1=[1;3;6];C1=[1 0 0];D1=[0];G1=ss(A1,B1,C1,D1);[y1,t1,x1]=step(G1);P=[1 2 3];K=acker(A1,B1,P);abk=A1B1*K;A2=abk;B2=B1;C2=C1;D2=D1;G2=ss(A2,B2,C2,D2);[y2,t2,x2]=step(G2);hold onplot(t1,x1)plot(t2,x2)(4)设计全阶状态观测器,要求状态观测器得极点为[5 6 7]。
实 验 报 告
课程 线性系统理论基础 实验日期 2016年 6月 6 日 专业班级 学号 同组人 实
验
名
称
全
维
状
态
观
测
器
的
设
计
评分
批阅教师签字
一、实验目的
1. 学习用状态观测器获取系统状态估计值的方法,了解全维状态观测器的极点对状态的估计误差的影响;
2. 掌握全维状态观测器的设计方法;
3. 掌握带有状态观测器的状态反馈系统设计方法。
二、实验容
开环系统⎩
⎨⎧=+=cx y bu Ax x
,其中
[]0100001,0,10061161A b c ⎡⎤⎡⎤⎢⎥⎢⎥===⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦
a) 用状态反馈配置系统的闭环极点:5,322-±-j ; b) 设计全维状态观测器,观测器的极点为:10,325-±-j ; c) 研究观测器极点位置对估计状态逼近被估计值的影响; d) 求系统的传递函数(带观测器及不带观测器时);
绘制系统的输出阶跃响应曲线。
三、实验环境
MATLAB6.5
四、实验原理(或程序框图)及步骤
利用状态反馈可以使闭环系统的极点配置在所希望的位置上,其条件是必须对全部状态变量都能进行测量,但在实际系统中,并不是所有状态变量都能测量的,这就给状态反馈的实现造成了困难。
因此要设法利用已知的信息(输出量y和输入量x),通过一个模型重新构造系统状态以对状态变量进行估计。
该模型就称为状态观测器。
若状态观测器的阶次与系统的阶次是相同的,这样的状态观测器就称为全维状态观测器或全阶观测器。
设系统完全可观,则可构造如图4-1所示的状态观测器
图4-1 全维状态观测器
为求出状态观测器的反馈ke增益,与极点配置类似,也可有两种方法:
方法一:构造变换矩阵Q,使系统变成标准能观型,然后根据特征方程求出k e ;
方法二:是可采用Ackermann公式:
[]T o
e Q A k 1000)(1
-Φ=,其中O Q 为可观性矩阵。
利用对偶原理,可使设计问题大为简化。
首先构造对偶系统
⎩⎨⎧=+=ξ
ηξξ
T
T T b v c A 然后可由变换法或Ackermann 公式求出极点配置的反馈k 增益,这也可由MATLAB 的place 和acker 函数得到;最后求出状态观测器的反馈增益。
五、程序源代码、实验数据、结果分析 (a )源程序:
A=[0 1 0;0 0 1;-6 -11 6];
B=[0;0;1];
C=[1 0 0];D=0;
P1=[-2+2*sqrt(3)*i;-2-2*sqrt(3)*i;-5]; K1=place(A,B,P1)
sysnew=ss(A-B*K1,B,C,D)
运行结果:
K1 =
74.0000 25.0000 15.0000
a =
x1 x2 x3
x1 0 1 0
x2 0 0 1 x3 -80 -36 -9
b = u1
x1 0 x2 0
x3 1
c = x1 x2 x3
y1 1 0
d = u1
y1 0 (b )源程序:
A=[0 1 0;0 0 1;-6 -11 6];
B=[0;0;1];
C=[1 0 0];D=0;
P2=[-5+2*sqrt(3)*i;-5-2*sqrt(3)*i;-10];
K2=acker(A',C',P2);L=K2'
Anew=A-L*C
运行结果:
L =
26
282
1770
Anew =
-26 1 0
-282 0 1
-1776 -11 6
(c)研究观测器极点位置对估计状态逼近被估计值的影响:观测器极点距离虚轴越近,估计状态逼近被估计值得速度越快。
(d)不带观测器:
源程序:
A=[0 1 0;0 0 1;-6 -11 6];
B=[0;0;1];
C=[1 0 0];D=0;
P1=[-2+2*sqrt(3)*i;-2-2*sqrt(3)*i;-5];
K1=place(A,B,P1)
sysnew=ss(A-B*K1,B,C,D);
[num,den]=ss2tf(A-B*K1,B,C,D);
Gb=tf(num,den)
step(Gb)
grid on;
title('不带观测器的系统的阶跃响应曲线');
运行结果:
K1 =
74.0000 25.0000 15.0000
Transfer function:
7.105e-015 s^2 + 1.208e-013 s + 1
--------------------------------------------
s^3 + 9 s^2 + 36 s + 80
带观测器:
源程序:
A=[0 1 0;0 0 1;-6 -11 6];
B=[0;0;1];
C=[1 0 0];D=0;
P1=[-2+2*sqrt(3)*i;-2-2*sqrt(3)*i;-5];
K1=place(A,B,P1);
sysnew=ss(A-B*K1,B,C,D);
P2=[-5+2*sqrt(3)*i;-5-2*sqrt(3)*i;-10];
K2=acker(A',C',P2);L=K2';
An=[A -B*K1;L*C A-B*K1-L*C]
Bn=[B;B]
Cn=[C 0 0 0]
Dn=0;
[num,den]=ss2tf(An,Bn,Cn,Dn);
Go=tf(num,den)
step(Go)
grid on;
title('带观测器的系统的阶跃响应曲线');
运行结果:
An =
1.0e+003 *
0 0.0010 0 0 0 0
0 0 0.0010 0 0 0
-0.0060 -0.0110 0.0060 -0.0740 -0.0250 -0.0150
0.0260 0 0 -0.0260 0.0010 0
0.2820 0 0 -0.2820 0 0.0010
1.7700 0 0 -1.8500 -0.0360 -0.0090
Bn =
0 1 0 0 1
Cn =
1 0 0 0 0 0
Transfer function:
-1.137e-013 s^4 + s^3 + 20 s^2 + 137 s + 370 -------------------------------------------------------------------------------
s^6 + 29 s^5 + 353 s^4 + 2403 s^3 + 9862 s^2 + 2.428e004 s + 2.96e004
Time (sec)
A m p l i t u d e
结果分析:
σ%=10.8% tp=1.15s ts=1.63s
原系统方框图
Gain2 10
原系统阶跃响应
加观测器的方框图:
Scope1:
Scope2:
Scope3:。