智能控制实验二-实验指导书
- 格式:pdf
- 大小:582.06 KB
- 文档页数:7
实验二智能机器人控制技术的研究一. 实验目的1. 熟悉机器人控制系统的组成与与相关控制技术。
2. 熟悉轮式移动机器人运动控制系统的组成与控制方法。
3.熟悉PID控制、模糊控制与神经网络控制算法的基本原理及其在智能机器人控制中的应用。
二. 实验基本理论机器人与计算机相区别的一个重要特征, 就是机器人能够运动。
而运动就必须有动力部件, 以及由这些动力部件驱动的结构。
因此, 合理选择和设计运动系统是移动机器人设计中一项基本而重要的工作。
通常, 运动系统是由移动机构和驱动系统组成的, 它们在控制系统的控制指挥下, 完成各种移动动作。
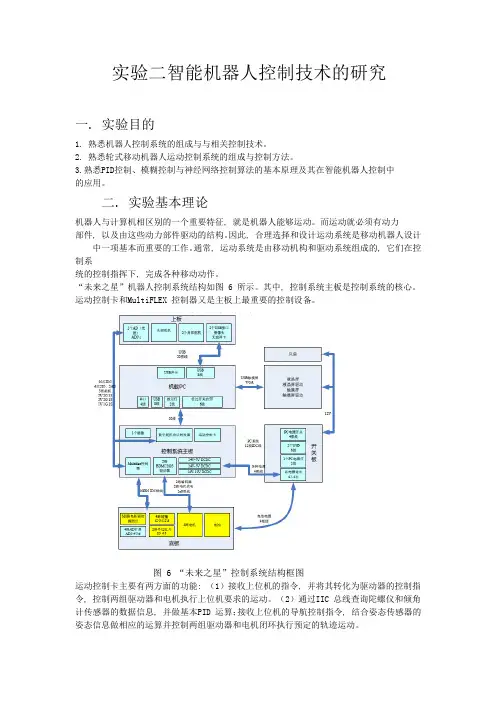
“未来之星”机器人控制系统结构如图 6 所示。
其中, 控制系统主板是控制系统的核心。
运动控制卡和MultiFLEX 控制器又是主板上最重要的控制设备。
图 6 “未来之星”控制系统结构框图运动控制卡主要有两方面的功能: (1)接收上位机的指令, 并将其转化为驱动器的控制指令, 控制两组驱动器和电机执行上位机要求的运动。
(2)通过IIC 总线查询陀螺仪和倾角计传感器的数据信息, 并做基本PID 运算;接收上位机的导航控制指令, 结合姿态传感器的姿态信息做相应的运算并控制两组驱动器和电机闭环执行预定的轨迹运动。
MultiFLEX 控制器是“未来之星”机器人的核心控制器, 是一个模块化的机器人控制卡。
同时, MultiFLEX 是一块公开电路图、公开源程序的控制卡。
用户可以根据这些资源, 自行为它开发针对某个特定机器人的程序, 使MultiFLEX 具有决策能力。
MultiFLEX 控制卡上的有多种输入输出接口, 在“未来之星”上主要用于简单传感器信息的采集和处理, 舵机和电机的运动控制。
在“未来之星”的系统架构中, 最底层的运动/控制执行层包括电机伺服控制器, 舵机控制器等。
MultiFLEX 控制卡搭载在机器人的总线上, 当作一个控制执行节点来使用。
控制执行层接受来自上层的控制指令, 处理大量高速原始数据, 并用简单的算法完成对执行器的自动控制, 以及对传感器的有效读取, 并把信息传递给上层。
自动控制原理实验目录实验一二阶系统阶跃响应(验证性实验) (1)实验三控制系统的稳定性分析(验证性实验) (9)实验三系统稳态误差分析(综合性实验) (15)预备实验典型环节及其阶跃响应一、实验目的1.学习构成典型环节的模拟电路,了解电路参数对环节特性的影响。
2.学习典型环节阶跃响应测量方法,并学会由阶跃响应曲线计算典型环节传递函数。
二、实验内容搭建下述典型环节的模拟电路,并测量其阶跃响应。
1.比例(P)环节的模拟电路及其传递函数示于图1-1。
2.惯性(T)环节的模拟电路及其传递函数示于图1-2。
3.积分(I)环节的模拟电路及其传递函数示于图1-3。
4. 比例积分(PI)环节的模拟电路及其传递函数示于图1-4。
5.比例微分(PD)环节的模拟电路及其传递函数示于图1-5。
6.比例积分微分(PID)环节的模拟电路及其传递函数示于图1-6。
三、实验报告1.画出惯性环节、积分环节、比例积分环节、比例微分环节、比例积分微分环节的模拟电路图,用坐标纸画出所记录的各环节的阶跃响应曲线。
2.由阶跃响应曲线计算出惯性环节、积分环节的传递函数,并与由模拟电路计算的结果相比较。
附1:预备实验典型环节及其阶跃响应效果参考图比例环节阶跃响应惯性环节阶跃响应积分环节阶跃响应比例积分环节阶跃响应比例微分环节阶跃响应比例积分微分环节阶跃响应附2:由模拟电路推导传递函数的参考方法1. 惯性环节令输入信号为U 1(s) 输出信号为U 2(s) 根据模电中虚短和虚断的概念列出公式:整理得进一步简化可以得到如果令R 2/R 1=K ,R 2C=T ,则系统的传递函数可写成下面的形式:()1KG s TS =-+当输入r(t)为单位脉冲函数时 则有输入U 1(s)=1输出U 2(s)=G(s)U 1(s)= 1KTS-+由拉氏反变换可得到单位脉冲响应如下:/(),0t TK k t e t T-=-≥ 当输入r(t)为单位阶跃函数时 则有输入U 1(s)=1/s输出U 2(s)=G(s)U 1(s)= 11K TS s-+由拉氏反变换可得到单位阶跃响应如下:/()(1),0t T h t K e t -=--≥当输入r(t)为单位斜坡函数时 则有输入U 1(s)=21s输出U 2(s)=G(s)U 1(s)=2323R R C T R R =+2Cs12Cs-(s)U R10-(s)U 21R R +-=12212)Cs (Cs 1(s)U (s)U )(G R R R s +-==12212)Cs 1((s)U (s)U )(G R R R s +-==由拉氏反变换可得到单位斜坡响应如下:/()(1),0t T c t Kt KT e t -=--≥2. 比例微分环节令输入信号为U 1(s) 输出信号为U 2(s) 根据模电中虚短和虚断的概念列出公式:(s)(s)(s)(s)(s)U100-U U 0U 2=1R1R23(4)CSU R R '''---=++由前一个等式得到 ()1()2/1U s U s R R '=- 带入方程组中消去()U s '可得1()1()2/11()2/12()1134U s U s R R U s R R U s R R R CS+=--+由于14R C〈〈,则可将R4忽略,则可将两边化简得到传递函数如下: 2()23232323()(1)1()11123U s R R R R R R R R G s CS CS U s R R R R R ++==--=-++如果令K=231R R R +, T=2323R R C R R +,则系统的传递函数可写成下面的形式:()(1)G s K TS =-+当输入r(t)为单位脉冲函数时,单位脉冲响应不稳定,讨论起来无意义 当输入r(t)为单位阶跃函数时 则有输入U 1(s)=1/s输出U 2(s)=G(s)U 1(s)=(1)K TS S-+由拉氏反变换可得到单位阶跃响应如下:()(),0h t KT t K t δ=+≥当输入r(t)为单位斜坡函数时 则有输入U 1(s)=21s输出U 2(s)=G(s)U 1(s)=2(1)K TS S -+由拉氏反变换可得到单位斜坡响应如下:(),0c t Kt KT t =+≥实验一 二阶系统阶跃响应(验证性实验)一、实验目的研究二阶系统的两个重要参数阻尼比ξ和无阻尼自然频率n ω对系统动态性能的影响。
自动控制原理实验指导书电力学院自动控制原理实验室二○○八年三月目录实验一典型环节的电路模拟与软件仿真 (2)实验二线性定常系统的瞬态响应 (6)实验三线性系统稳态误差的研究 (8)实验四系统频率特性的测量 (11)实验五线性定常系统的串联校正 (13)附: THBDC-1控制理论.计算机控制技术实验平台简介 (16)实验一典型环节的电路模拟与软件仿真一、实验目的1.熟悉并掌握THBDC-1型控制理论·计算机控制技术实验平台及上位机软件的使用方法。
2.熟悉各典型环节的电路传递函数及其特性,掌握典型环节的电路模拟与软件仿真研究。
3.测量各典型环节的阶跃响应曲线,并了解参数变化对其动态特性的影响。
二、实验设备1.THBDC-1型控制理论·计算机控制技术实验平台2.PC机1台(含上位机软件) USB数据采集卡37针通信线1根16芯数据排线USB接口线3.双踪慢扫描示波器1台(可选)4.万用表1只三、实验内容1.设计并组建各典型环节的模拟电路;2.测量各典型环节的阶跃响应,并研究参数变化对其输出响应的影响;3.在上位机界面上,填入各典型环节数学模型的实际参数,据此完成它们对阶跃响应的软件仿真,并与模拟电路测试的结果相比较。
四、实验原理自控系统是由比例、积分、微分、惯性等典型环节按一定的关系连接而成。
熟悉这些环节对阶跃输入的响应,对分析线性系统将是十分有益的。
在附录中介绍了典型环节的传递函数、理论的阶跃响应曲线和环节的模拟电路图。
五、实验步骤1.熟悉实验台,利用实验台上的各电路单元,构建所设计比例环节(可参考本实验附录)的模拟电路并连接好实验电路;待检查电路接线无误后,接通实验台的电源总开关,并开启±5V,±15V直流稳压电源。
2.把采集卡接口单元的输出端DA1、输入端AD2与电路的输入端U i相连,电路的输出端U o则与采集卡接口单元中的输入端AD1相连。
连接好采集卡接口单元与PC上位机的通信线。
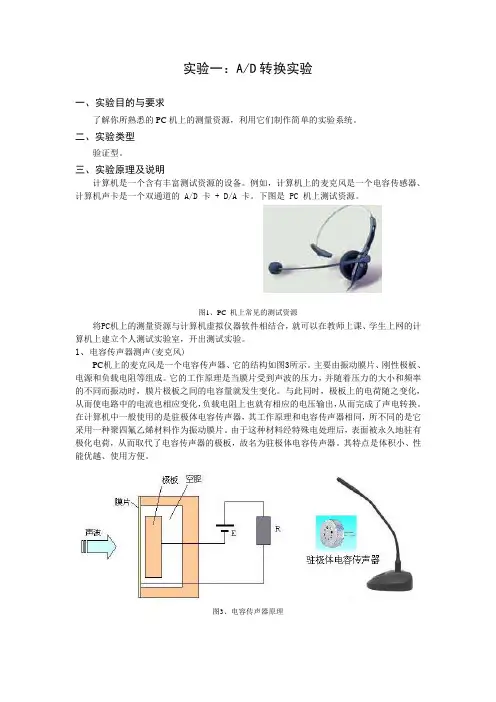
实验一:A/D转换实验一、实验目的与要求了解你所熟悉的PC机上的测量资源,利用它们制作简单的实验系统。
二、实验类型验证型。
三、实验原理及说明计算机是一个含有丰富测试资源的设备。
例如,计算机上的麦克风是一个电容传感器、计算机声卡是一个双通道的 A/D 卡 + D/A 卡。
下图是 PC 机上测试资源。
图1、PC 机上常见的测试资源将PC机上的测量资源与计算机虚拟仪器软件相结合,就可以在教师上课、学生上网的计算机上建立个人测试实验室,开出测试实验。
1、电容传声器测声(麦克风)PC机上的麦克风是一个电容传声器、它的结构如图3所示。
主要由振动膜片、刚性极板、电源和负载电阻等组成。
它的工作原理是当膜片受到声波的压力,并随着压力的大小和频率的不同而振动时,膜片极板之间的电容量就发生变化。
与此同时,极板上的电荷随之变化,从而使电路中的电流也相应变化,负载电阻上也就有相应的电压输出,从而完成了声电转换。
在计算机中一般使用的是驻极体电容传声器,其工作原理和电容传声器相同,所不同的是它采用一种聚四氟乙烯材料作为振动膜片。
由于这种材料经特殊电处理后,表面被永久地驻有极化电荷,从而取代了电容传声器的极板,故名为驻极体电容传声器。
其特点是体积小、性能优越、使用方便。
图3、电容传声器原理2.A/D、D/A变换(声卡)声卡是多媒体电脑的主要部件之一,它包含记录和播放声音所需的硬件。
声卡的种类很多,功能也不完全相同,但它们有一些共同的基本功能:能选择以单声道或双声道录音,并且能控制采样速率。
声卡上有数模转换芯片(DAC),用来把数字化的声音信号转换成模拟信号,同时还有模数转换芯片(ADC),用来把模拟声音信号转换成数字信号。
四、实验仪器五、实验内容和步骤利用DRVI软件和PC机上的测量资源进行测量实验。
A/D、D/A工作原理实验以及声音信号测量和频谱分析实验。
1. 运行DRVI主程序,点击DRVI快捷工具条上的"联机注册"图标,选择其中的“DRVI 采集仪主卡检测”或“网络在线注册”进行软件注册。
《自动控制原理》实验指导书31000字实验一、开关量控制与监测实验目的:掌握开关量控制与监测的基本原理及方法。
实验器材:PC机、PLC编程软件、PLC编程器、PLC实验箱、直流电源、继电器、开关。
实验内容:1. 使用PLC编程软件进行PLC的程序编写。
2. 使用直流电源作为控制电源,将继电器与开关连接,利用PLC实现开关量控制和监测。
实验步骤:1. 利用PLC编程软件进行PLC的程序编写。
2. 将直流电源的正极与继电器的常闭端相连,继电器的常开端与开关相连。
3. 将开关的另一端与PLC的输入端相连,PLC的输出端与继电器的控制端相连。
4. 将直流电源的负极与PLC实验箱的接地端相连。
5. 将PLC编程器连接到PC机上,将编写好的程序下载到PLC实验箱中。
6. 按下开关,观察继电器的输出,检查程序的正确性。
实验结果:1. 开关按下,PLC输出信号,继电器吸合。
2. 开关松开,PLC输出信号,继电器断开。
实验二、模拟量采集和控制实验目的:掌握模拟量采集和控制的基本原理及方法。
实验器材:PC机、PLC编程软件、PLC编程器、PLC实验箱、直流电源、电位器、LED灯。
实验内容:1. 使用PLC编程软件进行PLC的程序编写。
2. 使用电位器作为模拟量输入信号源,利用PLC采集电位器的模拟量信号,并控制LED灯的亮度。
实验步骤:1. 利用PLC编程软件进行PLC的程序编写。
2. 将电位器的信号通过模拟量转换模块输入到PLC的模拟量输入端。
3. 利用PLC的模拟量比较指令,将电位器的模拟量信号转换成数字量信号。
4. 根据数字量输出信号的状态,控制LED灯的亮度。
5. 将直流电源的负极与PLC实验箱的接地端相连。
6. 将PLC编程器连接到PC机上,将编写好的程序下载到PLC实验箱中。
7. 调节电位器,观察LED灯的亮度变化。
实验结果:1. 电位器调整时,模拟量输入信号发生变化。
2. 根据模拟量输入信号的大小,PLC输出数字量信号,控制LED灯的亮度。
《智能控制技术》实验指导书文哲雄编华南师范大学增城学院2013年 9 月 1前言本实验课程是与《智能控制技术》课程的理论教学内容相配套而开设的。
《智能控制技术》是一门实践性很强的专业课程,它对培养学生实践动手能力,提高综合素质和开发创新思维有着重要的作用。
《智能控制技术》实验在工程和教学中都有非常重要的作用,具有自身的特点和很强的实践性。
智能控制方法和手段很多,本实验指导书介绍的是最常见的智能控制技术,最常用系统设计方法和系统调试技术。
主要培养学生具有智能控制系统设计和调试技术、以及应用能力;开拓学生思路,培养学生综合应用知识的能力和创新能力。
培养学生严肃认真,求实求真的科学作风,为后续毕业设计和今后从事电子技术方面的工作打下基础。
在实验项目中有一部分是设计性实验,教师给出实验项目的要求,学生自己选择实验方案和实验电路,自己完成实验步骤的内容。
要求学生写出系统设计方案,硬件电路设计、软件程序设计和现场调试。
写出实验心得体会。
实验成绩根据实际操作和实验报告综合评分标。
由于编者水平有限,难免在本实验指导书中出现错误或不妥之处,望读者指正。
目录实验一认识 HL-1 实验箱 (4)实验二 D/A转换实验 (6)实验三 A/D转换实验 (9)实验四矩阵键盘接口设计实验 (12)实验五 LCD显示器接口实验 (20)实验六报警控制接口实验 (25)实验七单片机温度控制实验 (29)实验八单片机转速控制实验 (38)实验九计算机温度PID控制实验 (43)实验十单片机—计算机转速测量/控制实验 (46)实验一认知 HL-1 实验箱一、实验目的1、了解HL-1实验箱的结构,功能和操作方法;2、掌握程序编辑、编译、程序代码下载的操作方法。
二、实验原理1、kiel软件的安装、程序编辑、程序编译的操作步骤。
2、STC-ISP下载软件的使用、接口驱动程序的安装。
3、HL-1实验箱电路原理。
三、实验仪器材料1、PC计算机2、HL-1实验箱四、实验内容1、说明kiel软件的安装、程序编辑、程序编译的操作步骤。
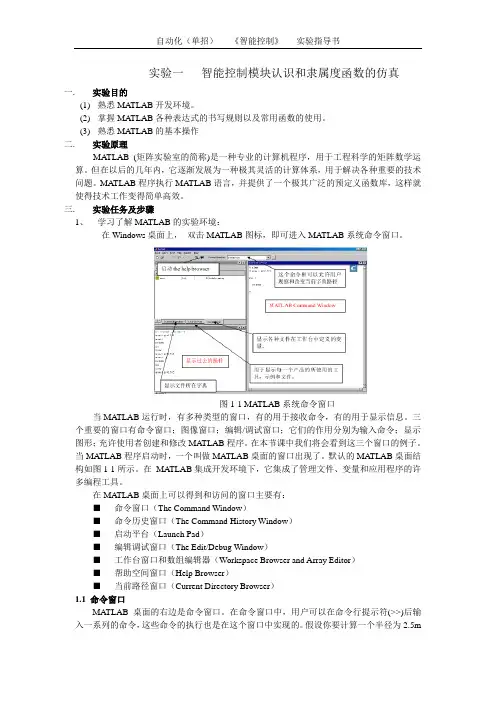
实验一智能控制模块认识和隶属度函数的仿真一.实验目的(1)熟悉MATLAB开发环境。
(2)掌握MATLAB各种表达式的书写规则以及常用函数的使用。
(3)熟悉MATLAB的基本操作二.实验原理MATLAB (矩阵实验室的简称)是一种专业的计算机程序,用于工程科学的矩阵数学运算。
但在以后的几年内,它逐渐发展为一种极其灵活的计算体系,用于解决各种重要的技术问题。
MA TLAB程序执行MATLAB语言,并提供了一个极其广泛的预定义函数库,这样就使得技术工作变得简单高效。
三.实验任务及步骤1、学习了解MATLAB的实验环境:在Windows桌面上,双击MA TLAB图标,即可进入MA TLAB系统命令窗口。
图1-1 MATLAB系统命令窗口当MA TLAB运行时,有多种类型的窗口,有的用于接收命令,有的用于显示信息。
三个重要的窗口有命令窗口;图像窗口;编辑/调试窗口;它们的作用分别为输入命令;显示图形;充许使用者创建和修改MATLAB程序。
在本节课中我们将会看到这三个窗口的例子。
当MA TLAB程序启动时,一个叫做MATLAB桌面的窗口出现了。
默认的MATLAB桌面结构如图1-1所示。
在MA TLAB集成开发环境下,它集成了管理文件、变量和应用程序的许多编程工具。
在MA TLAB桌面上可以得到和访问的窗口主要有:■命令窗口(The Command Window)■命令历史窗口(The Command History Window)■启动平台(Launch Pad)■编辑调试窗口(The Edit/Debug Window)■工作台窗口和数组编辑器(Workspace Browser and Array Editor)■帮助空间窗口(Help Browser)■当前路径窗口(Current Directory Browser)1.1 命令窗口MA TLAB桌面的右边是命令窗口。
在命令窗口中,用户可以在命令行提示符(>>)后输入一系列的命令,这些命令的执行也是在这个窗口中实现的。
智能控制课内实验报告(3次)学院:自动化学院班级:智能姓名:学号:智能控制课内实验(1)模糊控制器的设计学院:自动化学院姓名:班级:学号:日期: 2017-9-30实验1.1模糊控制器的设计一、实验目的在matlab环境下,完成一个对水位控制的模糊控制器的设计。
二、实验内容(1)确定控制器的输入、输出的隶属度函数偏差e(t) :e(t)=r(t)-c(t)负反馈三个模糊子集“负大”(水位高)、“零”和“正大”(水位低)。
偏差变化率:de,三个模糊子集“负大”(高趋势)、“零”和“正大”(低趋势)。
控制量u:“负大”、“负中”、“零”、“正中”、“正大”。
Matlab操作方法:打开matlab在命令行输入:fuzzy出现下图界面:在上图选择“edit”出现下图:选择“Add Variable-- Input”再添加输入这样就建立了两个输入,一个输出的模糊控制器。
再修改输入、输出的各参数:input1改为e;input2改为de; output1改为u ;如下图:双击“e” ,修改模糊子集:如下图修改e的负大:注意各参数的设置修改好的e的模糊子集如下图:用同样的方法修改de如下图:修改u的方法如下图:需要5个模糊子集添加模糊子集的方法:在“edit”菜单下选择“Add Custom MF”下图是对”O”这个模糊子集的设置:设置好的u的模糊子集如下图:(2)添加规则的方法:添加规则的界面如下:这样一个模糊推理控制器就建立完毕了。
(3)利用模糊控制器可以得到规则曲面以及根据输入得到输出如上图操作可以得到规则曲面:如下图可以得到规则的推理结果:改变上图e和de的值,可以看到u的不同的输出。
然后可以把该系统存为tank.fis.三、写出实验的心得体会总结建立模糊控制器的方法。
实验1.2神经网络工具箱的应用二.神经网络工具箱函数最新版的MATLAB 神经网络工具箱为Version4.0.3, 它几乎涵盖了所有的神经网络的基本常用类型,对各种网络模型又提供了各种学习算法,我们可以根据自己的需要调用工具箱中的有关设计与训练函数,很方便地进行神经网络的设计和仿真。
. . .. . ..《智能控制技术》实验指导书适用专业:自动化电气工程及其自动化2011年3 月前言智能控制课程是自动化、电气工程及其自动化等专业的主要技术基础课。
主要是通过本课程的学习,使学生了解智能控制的基本理论、智能控制系统的分析方法和工程应用,了解智能控制发展前沿动态等。
为了使学生更好地理解和深刻地把握这些知识,并在此基础上训练和培养学生使用MATLAB的能力以及进行系统仿真的设计技能,设置了“模糊控制与传统PID控制的性能比较”以及“神经元自适应PID控制仿真研究”2个实验项目,2个皆为综合性实验。
模糊控制与传统PID控制的性能比较实验,主要通过本实验的学习,使学生了解传统PID控制、模糊控制等基本知识,掌握传统PID控制器设计、模糊控制器设计等知识,训练学生设计控制器的能力,培养他们利用MATLAB进行仿真的技能,为今后继续模糊控制理论研究以及控制仿真等学习奠定基础。
神经元自适应PID控制仿真研究实验,主要是通过本实验的学习,使学生了解传统PID控制、神经元自适应控制等基本知识,掌握传统PID 控制器设计、掌握基于二次型性能指标学习算法的单神经元自适应PID 控制等知识,训练学生设计控制器的能力,培养他们利用MATLAB进行仿真的技能,为今后继续神经网络控制理论的研究以及控制仿真等学习奠定基础。
实验一:模糊控制与传统PID控制的性能比较实验学时:2实验类型:设计实验要求:必修一、实验目的通过本实验的学习,使学生了解传统PID控制、模糊控制等基本知识,掌握传统PID控制器设计、模糊控制器设计等知识,训练学生设计控制器的能力,培养他们利用MATLAB进行仿真的技能,为今后继续模糊控制理论研究以及控制仿真等学习奠定基础。
二、实验内容本实验主要是设计一个典型环节的传统PID控制器以及模糊控制器,并对他们的控制性能进行比较。
主要涉及自控原理、计算机仿真、智能控制、模糊控制等知识。
通常的工业过程可以等效成二阶系统加上一些典型的非线性环节,如死区、饱和、纯延迟等。
楼宇智能化技术实验指导书编者谢曼第三章实验二电梯的PLC控制一、实验目的1. 掌握PLC 控制的基本原理,各种指令的综合应用2. 掌握置位、复位、步进指令的使用3. 了解并掌握PLC电梯控制原理二、实验器材1.ZYE3103B型可编程控制器实验台2.ZYPLC07电梯的PLC控制演示板3.PC机或FX-20P-E编程器4.编程电缆5.连接导线三、实验原理与实验步骤1 台1 块1 台1 根若干1. 2.该模块中SIN1-SIN4为4 个霍尔开关,分别接到PLC的四个输入点,作为控制电梯的行程开关,当电梯经过霍尔开关时,开关输出0 信号。
模块左侧的是六个门厅呼叫按钮,用来表示一到四层的轿外呼叫信号,模块右下脚是四个轿内选层按钮,用来表示轿内一到四层的选层信号。
顶端的一个LED数码管用来显示电梯的所在位置,两个发光二极管表示电梯的上升或下降状态。
控制要求:(1) 电梯上升电梯停于某层,当有高层某一信号呼叫时,电梯上升到呼叫层停止。
例电梯在1楼,4 楼呼叫,则电梯上升到4 楼停止电梯停于某层,当有高层多个信号同时呼叫时,电梯先上升到低的呼叫层,停5s后继续上升到高的呼叫层。
例电梯在1楼,2、3、4层同时有呼叫时,则电梯先上升到2 楼,停3s后继续上升到三楼,再停3s 后继续上升到4楼停止。
数码管应该显示电梯的即时楼层位置。
(2) 电梯下降电梯停于某层,当有低层某一信号呼叫时,电梯下降到呼叫层停止。
例电梯在四楼,1 楼呼叫,则电梯下降到1 楼停止。
电梯停于某层,当有低层多个信号同时呼叫时,电梯先下降到高的呼叫层,停5S后继续下降到低的呼叫层。
例电梯在4楼,3、2、1层同时呼叫,则电梯先下降到3 楼,停3s 后继续下降到2楼,再停3s 后继续下降到一楼停止。
数码管应该显示电梯的即时楼层位置。
3. 实验步骤:(1) 打开PLC 实验台电源,编程器与PLC连接。
(2)根据具体情况编制输入程序,并检查是否正确。
(3)按接线图图3-1连线,实验台与ZYPLC07连接,检查连线是否正确。
自动控制原理实验实验一典型环节的MATLAB仿真实验二线性系统时域响应分析实验三线性系统的根轨迹实验四线性系统的频域分析实验五线性系统串联校正实验六模拟实验仿真实验一典型环节的MATLAB仿真一、实验目的1.熟悉MATLAB桌面和命令窗口,初步了解SIMULINK功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、SIMULINK的使用MATLAB中SIMULINK是一个用来对动态系统进行建模、仿真和分析的软件包。
利用SIMULINK功能模块可以快速的建立控制系统的模型,进行仿真和调试。
1.运行MATLAB软件,在命令窗口栏“>>”提示符下键入simulink命令,按Enter 键或在工具栏单击按钮,即可进入如图1-1所示的SIMULINK仿真环境下。
2.选择File菜单下New下的Model命令,新建一个simulink仿真环境常规模板。
3.在simulink仿真环境下,创建所需要的系统。
以图1-2所示的系统为例,说明基本设计步骤如下:1)进入线性系统模块库,构建传递函数。
点击simulink下的“Continuous”,再将右边窗口中“Transfer Fen”的图标用左键拖至新建的“untitled”窗口。
2)改变模块参数。
在simulink仿真环境“untitled”窗口中双击该图标,即可改变传递函数。
其中方括号内的数字分别为传递函数的分子、分母各次幂由高到低的系数,数字之间用空格隔开;设置完成后,选择OK,即完成该模块的设置。
3)建立其它传递函数模块。
按照上述方法,在不同的simulink的模块库中,建立系统所需的传递函数模块。
例:比例环节用“Math”右边窗口“Gain”的图标。
4)选取阶跃信号输入函数。
用鼠标点击simulink下的“Source”,将右边窗口中“Step”图标用左键拖至新建的“untitled”窗口,形成一个阶跃函数输入模块。
实验一 模糊控制器设计与实现实验名称:模糊控制器设计与实现实验教学的指导思想和教学目的:本实验是在学生掌握模糊控制器基本工作原理和设计方法基础上,阅读有关参考书利用MATLAB 中Fuzzy toolboxes 设计模糊控制器,并建立模糊控制系统。
实验教学的基本要求:要求学生通过上机实习,熟悉MATLAB 的基本操作命令、simulink 和模糊控制工具箱的使用,掌握利用MATLAB 设计模糊控制器的基本方法,为以后利用计算机进行模糊控制系统分析与设计打下良好的基础。
实验步骤:模糊控制位置跟踪被控对象为首先运行模糊控制器程序chap4_2.m ,并将模糊控制系统保存在a2之中。
然后运行模糊控制的Simulink 仿真程序,位置指令取正弦信号,仿真结果如图4-10所示。
模糊控制位置跟踪的Simulink 仿真程序见chap4_3.mdl 。
图4-10 正弦位置跟踪s 50s 400)(2+=s G实验二 洗衣机模糊控制器的设计与仿真实验名称:洗衣机模糊控制器的设计与仿真实验目的:掌握洗衣机模糊控制器的设计步骤以及MATLAB 仿真实现实验步骤:(1)模糊控制器的结构选用单变量二维模糊控制器。
控制器的输入为衣物的污泥和油脂,输出为洗涤时间。
(2)定义输入输出模糊集将污泥分为三个模糊集:SD (污泥少),MD (污泥中),LD (污泥多),取值范围为[0,100]。
(3)定义隶属函数选用如下隶属函数:采用三角形隶属函数实现污泥的模糊化,如图4-11所示。
采用Matlab 仿真,可实现污泥隶属函数的设计,仿真程序为chap4_4.m将油脂分为三个模糊集:NG (无油脂),MG (油脂中),LG (油脂多),取值范围为[0,100]。
选用如下隶属函数:采用三角形隶属函数实现污泥的模糊化,如下图4-12所示。
仿真程序同污泥隶属函数。
⎪⎪⎩⎪⎪⎨⎧≤<-=⎩⎨⎧≤<-≤≤=≤≤-==1005050/)50()(1005050/)100(50050/)(50050/)50()(x x x x x x x x x x x LD MD SD μμμμ污泥⎪⎪⎩⎪⎪⎨⎧≤≤-=⎩⎨⎧≤<-≤≤=≤≤-==1005050/)50()(1005050/)100(50050/)(50050/)50()(y y y y y y y y y y y LG MG NG μμμμ油脂图4-12 油脂隶属函数将洗涤时间分为三个模糊集:VS (很短),S (短),M (中等),L (长),VL (很长),取值范围为[0,60]。
《智能控制》实验指导书《智能控制》实验指导书河北工业大学控制科学与工程学院2013.09实验一基于MATLAB的模糊推理系统设计一、实验目的要求在掌握模糊控制器基本工作原理和设计方法的基础上,熟悉MALAB的模糊控制工具箱,能针对实际问题设计模糊控制器,建立模糊控制系统,训练学生综合运用计算机来解决一些实际问题的能力。
二、实验要求1. 熟练掌握基于MATLAB的模糊推理系统设计;2. 设计小费模糊推理系统;3. 设计水箱液位模糊控制系统。
三、实验内容(一)模糊逻辑工具箱的介绍模糊逻辑工具箱提供的图形用户界面(GUI)工具有五个:模糊推理系统(FIS)编辑器;隶属函数编辑器;模糊规则编辑器;模糊规则观察器;输出曲面观察器。
1. FIS编辑器:Matlab的FIS界面如图1所示。
FIS处理系统有多少个输入变量,输出变量,名称是什么,模糊算子“与”(min,prod乘积,custom自定义),“或”(max大,probor 概率统计方法,custom),推理方法(min,prod,custom),聚类方法(max,probor,sum,custom),解模糊的方法(centroid 质心法,bisector中位线法,middle of maximum,largest of maximum,smallest of maximum)。
推理的类型有mamdani和sugeno 推理。
图1 模糊推理系统(FIS)界面Mamdani推理:一种在模糊控制中普遍使用的方法,它本质上仍然是一种合成推理方法,只不过对模糊蕴涵关系取不同的形式而已。
Mamdani 型推理从每个规则的结果中得到的模糊集通过聚类运算后得到结果模糊集,被反模糊化后得到系统输出。
Sugeon型推理:其中每个规则的结果是输入的线性组合,而输出是结果的加权线性组合。
2. 隶属函数编辑器确定各个变量的论域和显示范围(左下角编辑区内),如图2所示。
定义每个变量的模糊集的名称和个数(Edit菜单中Add MFs),以及每个模糊变量的隶属函数类型和参数(点击变量的隶属函数曲线后在右下角编辑区内修改)。
目录实验一系统状态响应、输出响应、能控性、能观性及稳定性测量.................................. ...... . (1)实验二线性系统的极点配置及响应分析 (7)实验一系统状态响应、输出响应、能控性、能观性及稳定性测量一、实验目的1.掌握线性系统能控性及能观性的判别方法。
2.掌握连续系统的离散化方法。
3.熟悉求解连续和离散系统动态响应的方法。
3.掌握用MATLAB实现现代控制理论基本算法的方法。
二、实验设备及条件微型计算机一台(带有MATLAB7.0以上的软件环境)。
三、MATLAB知识1.矩阵函数运算(1) 求秩函数rank()。
(2) 矩阵求逆函数inv()。
(3) 求矩阵特征值函数eig()。
(4) 求行列式函数det()。
(5) 建立全1矩阵函数ones()。
2.多项式、模型特性及转化(1) c2d()--将连续系统离散化。
(2) d2c()--将离散系统连续化。
(3) ctrb()--求能控判别阵。
(4) obsv()--求能观判别阵。
(5) ss2tf()--将状态空间模型转化成传递函数模型。
(6) tf2ss()--将传递函数模型转化成状态空间模型。
(7) poly—由多项式的根生成一多项式,其结果是由多项式系数组。
成的行矢量。
若poly输入参数为矩阵,则可得到该矩阵的特征多项式。
{ Δ(λ)=det(λI-A) }。
3.绘图命令(1) plot(x,y)--绘制y对应x的轨迹的命令。
x、y均为矢量且具有相同的元素数量。
(2) axis--定义坐标轴的特殊定标尺度,格式为:axis([x-min,x-max,y-min,y-max])。
(3) figure--建立图形(窗口)。
(4) subplot()--建立和控制多个坐标系。
(5) xlabel()、ylabel()、zlabel()—建立x、y、z轴的标注。
4.时域响应(1) filter()--一维数字滤波函数,在求离散系统动态响应时常使用本函数,格式为y =filter(num,den,x ),其中,x 是输入,y 是输出。
《智能控制》实验指导书通过对智能控制系统的仿真实验,加深对智能控制原理的理解,并且学习和掌握智能控制的实现方法。
实验一 控制系统的基本结构仿真实验目的:建立智能控制研究的实验环境。
实验要求:1. 对单输入-单输出反馈控制系统(如图一),进行结构仿真。
图1 控制系统的基本结构(1) 被控对象的数学模型0G (s) = )1)(1(21s++-s T s T Ke τ ,(K 、1T 、2T 、τ>0) (2) 控制器包括:PID 控制器、专家系统控制器、模糊控制器、仿人智能控制器。
2. 建立友好的人-机接口(1) 对于被控对象参数可以通过人-机界面设置和修改。
(2) 对于各种控制器可以通过人-机界面选择,并设置该控制器的控制参数。
(3) 通过人-机界面可显示系统的响应曲线。
实验二 PID 控制的设计与实现实验目的:掌握PID 控制的实现方法和系统整定方法,了解PID 控制的鲁棒性。
实验要求:1. 设计并实现PID 控制器。
2. 设被控对象参数为:K=2、1T =1、2T =2.5、τ=0.6;要求单位阶跃响应指标:超调量σ%≤10%,调节时间s t ≤10秒;试对系统进行整定,给出实验结果:(1) 控制器参数:p K 、i K 、d K 及采样时间T ;(2) 系统实际的性能指标:σ%、s t ;(3) 系统的单位阶跃响应曲线y(t);3. 保持控制器所有控制参数不变,只改变被控对象的纯时延τ,检验系统的鲁棒性(对τ变化的适应能力)。
(1) τ=1.2时,运行系统。
给出系统的单位阶跃响应曲线,并计算响应的系统性能指标σ%、s t 。
(2) τ=1.8时,运行系统。
给出系统的单位阶跃响应曲线,并计算响应的系统性能指标σ%、s t 。
实验三 专家系统控制的设计与实现实验目的:掌握专家系统控制的原理和实现方法,了解专家系统控制的鲁棒性。
实验要求:1. 可以采用直接专家系统控制或间接专家系统控制。
说明所采用的专家系统控制原理。
《智能控制》实验指导书袁启昌编南京工业大学自动化学院2005年9月实验一模糊逻辑与模糊控制一、实验目的1.应用MATLAB屮模糊推理系统FIS工具建立模糊推理系统进行模糊推理。
2.应用ANFIS工具进行模糊建模。
2.进行一维模糊控制与二维模糊控制系统设计与仿真。
二、实验内容1.熟悉MATLAB Fuzzy I.M箱的使用。
2.应用Fuzzy 具箱中的模糊推理系统FIS X具建立模糊推理系统,用mamdani法进行模糊推理。
3.用ANFIS I具和Sugeno模糊推理方法进行模糊建模。
4.使用Sinwlink I具和FLC (模糊逻辑控制器)进行一•维模糊控制与二维模糊控制系统设计与仿真。
三、实验方法与步骤1.应用FIS I.具和mam dan i方法进行tipper问题的模糊推理A.确定输入、输出模糊集合的隶属函数,制定模糊推理规则,建立模糊推理系统;B.进行模糊推理,观察输入精确彊的模糊化、强度转移法模糊推理的过程图解、输出模糊量的精确化方法。
2.应用ANFIS J:具进行模糊建模A.获取待建模的样本数据集;B.建立初始的Sugeno模糊推理系统,训练前用输入数据对FIS进行测试;C.选择训练方式和训练参数,对FIS进行训练,训练后用输入数据对FIS进行测试、观察建模效果、调-整模型参数、重新训练直至模型满足要求;D.观察训练前后FIS参数的变化。
3.在Simulink中进行水位模糊控制系统设计与仿真A.应用FIST.具设计二维模糊控制器的结构,确迄二维输入及输出模糊集合的隶属函数,制定模糊控制规则,建立二维模糊控制器;B.在Simulink中建立水位模糊控制系统模型,进行二维模糊控制仿真;C.在相同对象下进行曲规PID控制仿真;D.应用FIS工具将二维模糊控制规则修改为一•维模糊控制,进行一维模糊控制仿真;E.対以上各种情况进行分析比较。
四、实验报告内容与要求1.绘制mamdani方法进行hpper问题的模糊推理图形;2.说明ANFIS Z.具进行模糊建模的步骤和结果;3.绘岀二维模糊控制器输入及输出模糊集合的隶属函数曲线;3.写岀一维和二维水位模糊控制的控制规则;4.绘出-•维、二维模糊控制以及PID控制的控制性能并进行比较。