作为旋转变换之生成元的角动量
- 格式:ppt
- 大小:213.50 KB
- 文档页数:15
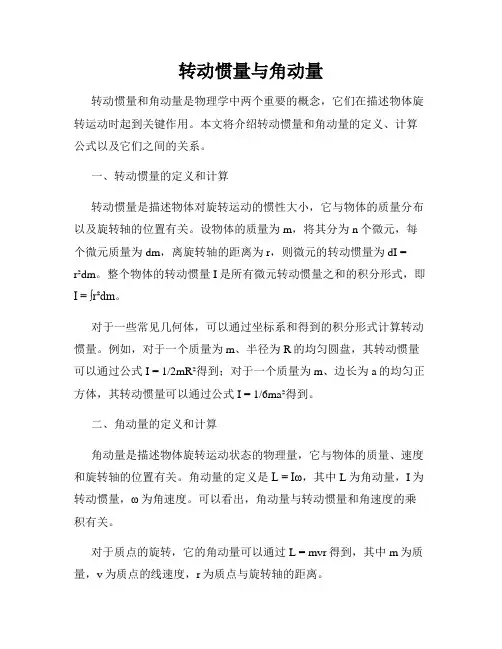
转动惯量与角动量转动惯量和角动量是物理学中两个重要的概念,它们在描述物体旋转运动时起到关键作用。
本文将介绍转动惯量和角动量的定义、计算公式以及它们之间的关系。
一、转动惯量的定义和计算转动惯量是描述物体对旋转运动的惯性大小,它与物体的质量分布以及旋转轴的位置有关。
设物体的质量为m,将其分为n个微元,每个微元质量为dm,离旋转轴的距离为r,则微元的转动惯量为dI =r²dm。
整个物体的转动惯量I是所有微元转动惯量之和的积分形式,即I = ∫r²dm。
对于一些常见几何体,可以通过坐标系和得到的积分形式计算转动惯量。
例如,对于一个质量为m、半径为R的均匀圆盘,其转动惯量可以通过公式I = 1/2mR²得到;对于一个质量为m、边长为a的均匀正方体,其转动惯量可以通过公式I = 1/6ma²得到。
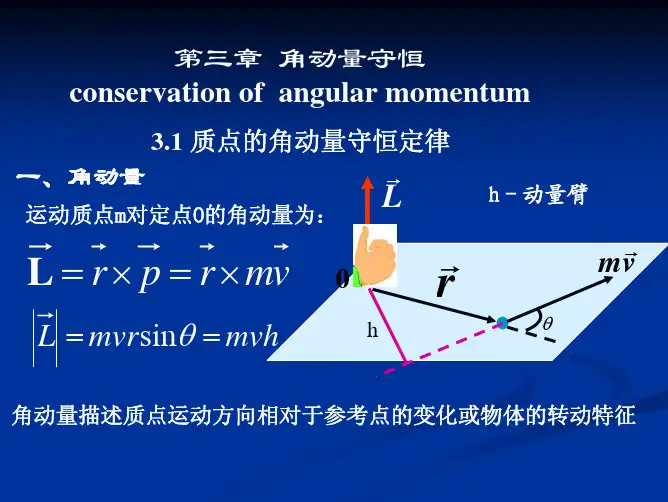
二、角动量的定义和计算角动量是描述物体旋转运动状态的物理量,它与物体的质量、速度和旋转轴的位置有关。
角动量的定义是L = Iω,其中L为角动量,I为转动惯量,ω为角速度。
可以看出,角动量与转动惯量和角速度的乘积有关。
对于质点的旋转,它的角动量可以通过L = mvr得到,其中m为质量,v为质点的线速度,r为质点与旋转轴的距离。
对于多个质点组成的系统,系统的总角动量L等于各个质点角动量之和的矢量和。
即L = L1 + L2 + ... + Ln。
三、转动惯量与角动量的关系转动惯量和角动量在物体旋转运动中是密切相关的。
根据角动量的定义L = Iω和角动量守恒定律,当外力矩为零时,旋转系统的角动量保持不变。
我们可以利用转动惯量和角动量的关系来简化一些旋转问题的分析。
例如,当一个物体绕固定轴旋转时,如果原先转动惯量较大,那么当转动惯量减小时,角速度会增加,以保持角动量守恒。
四、结论转动惯量和角动量是描述物体旋转运动的重要概念。
转动惯量是物体对旋转的惯性大小,可以通过质量分布和旋转轴的位置来计算。

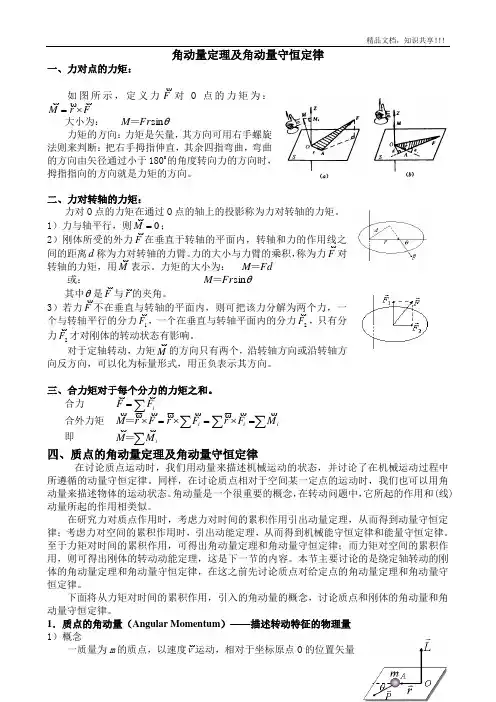
精品文档,知识共享!!!角动量定理及角动量守恒定律一、力对点的力矩:如图所示,定义力F对O 点的力矩为: F r M ⨯=大小为: θsin Fr M = 力矩的方向:力矩是矢量,其方向可用右手螺旋法则来判断:把右手拇指伸直,其余四指弯曲,弯曲的方向由矢径通过小于1800的角度转向力的方向时,拇指指向的方向就是力矩的方向。
二、力对转轴的力矩:力对O 点的力矩在通过O 点的轴上的投影称为力对转轴的力矩。
1)力与轴平行,则0=M;2)刚体所受的外力F在垂直于转轴的平面内,转轴和力的作用线之间的距离d 称为力对转轴的力臂。
力的大小与力臂的乘积,称为力F对转轴的力矩,用M表示。
力矩的大小为: Fd M = 或: θsin Fr M =其中θ是F 与r的夹角。
3)若力F 不在垂直与转轴的平面内,则可把该力分解为两个力,一个与转轴平行的分力1F,一个在垂直与转轴平面内的分力2F ,只有分力2F才对刚体的转动状态有影响。
对于定轴转动,力矩M的方向只有两个,沿转轴方向或沿转轴方向反方向,可以化为标量形式,用正负表示其方向。
三、合力矩对于每个分力的力矩之和。
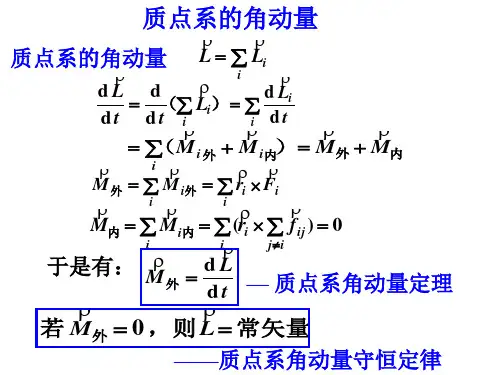
合力 ∑=i F F合外力矩 ∑∑∑=⨯=⨯=⨯i i i M F r F r F r M=即 ∑i M M=四、质点的角动量定理及角动量守恒定律在讨论质点运动时,我们用动量来描述机械运动的状态,并讨论了在机械运动过程中所遵循的动量守恒定律。
同样,在讨论质点相对于空间某一定点的运动时,我们也可以用角动量来描述物体的运动状态。
角动量是一个很重要的概念,在转动问题中,它所起的作用和(线)动量所起的作用相类似。
在研究力对质点作用时,考虑力对时间的累积作用引出动量定理,从而得到动量守恒定律;考虑力对空间的累积作用时,引出动能定理,从而得到机械能守恒定律和能量守恒定律。
至于力矩对时间的累积作用,可得出角动量定理和角动量守恒定律;而力矩对空间的累积作用,则可得出刚体的转动动能定理,这是下一节的内容。
力学中的旋转转动物体和角动量的特性与计算在力学中,我们研究的不仅仅是直线运动,还包括旋转运动。
旋转转动物体是指物体绕某个轴进行旋转的运动,例如地球的自转和人体的转动等。
与旋转转动物体相关的一个重要概念是角动量,它描述了物体的旋转特性和运动状态。
本文将探讨旋转转动物体和角动量的特性以及如何计算角动量。
一、旋转转动物体的特性旋转转动物体与直线运动物体相比具有许多独特的特性。
首先,旋转转动物体的运动轨迹通常是环绕着某个轴进行的,而不是直线上的运动。
这意味着旋转物体的位移向量是一个矢量,具有方向和大小。
其次,旋转转动物体的速度和加速度也与直线运动物体不同。
在直线运动中,速度是位移对时间的导数,而在旋转运动中,速度则是角位移对时间的导数。
类似地,加速度也是角速度对时间的导数。
这些不同之处使得旋转物体的运动与直线运动有着本质上的区别。
另外,旋转转动物体还具有惯性力矩的概念。
当外界施加力矩时,旋转物体会产生转动加速度,使得物体的角速度发生变化。
根据牛顿第二定律,旋转物体的转动惯性力矩与角加速度成正比。
二、角动量的特性角动量是描述旋转物体运动状态的物理量,定义为物体的角动量矢量与角速度矢量的叉积。
角动量的大小等于物体的质量和角速度的乘积,并与旋转轴的位置有关。
角动量具有以下几个重要的特性:1. 守恒定律:如果一个系统在没有外力矩作用下,系统的角动量将保持不变。
这是因为根据牛顿第三定律,旋转物体受到的合外力矩为零,因此角动量守恒。
2. 旋转惯量:旋转惯量是描述物体对旋转运动的惯性的物理量,与物体的质量分布和旋转轴的位置有关。
旋转惯量越大,物体的转动越不容易改变,即惯性越大。
3. 角动量定理:角动量定理描述了角动量的变化与力矩的关系。
根据角动量定理,力矩等于时间对角动量的导数。
这意味着当外力矩作用在物体上时,物体的角动量将发生变化。
三、角动量的计算计算角动量的方法很多,具体取决于旋转物体的形状和运动特征。
下面介绍几种常见情况下的角动量计算方法。
§3.1 转动及角动量的对易关系一、有限转动绕同一轴的转动是对易的,但绕不同轴的转动是不对易的:二、转动的数学描述转动前后矢量可由表征该转动的实3x3正交矩阵联系:正交矩阵:RR T=R T R=1(T表示矩阵的转置)如绕Z轴转Φ角的矩阵为:转动不改变矢量的长度:三、无穷小转动⏹由:⏹得:(忽略2阶小量,则绕不同轴的无穷小转动是对易的)⏹或:四、 量子力学中的无穷小转动1)态矢的变化:R 的维数为3,D(R)的维数依态矢空间的维数而定2)转动算符的构造⏹参照无穷小空间平移和无穷短时间演化算符的构造,考虑到角动量是转动的生成元,可得绕由单位矢量 所表征的轴转d Φ的转动算符 : ⏹这里厄米算符J k 为角动量算符。
上式可看作量子动力学中角动量算符的定义。
该定义比经典的角动量(X x P )定义更普适,适用于自旋等。
nˆ''()1dx iK dx ⇐Γ=-⋅五、有限转动有限大小角度的转动可由无数个无穷小转动组合而成:这里的Jz是个定义六、转动算符的性质假定 D(R)与R具有相同的群性质:七、角动量算符的对易关系⏹对应于⏹有:⏹得对易关系:⏹综合J x与J z及J y与J z的关系,可得角动量算符的基本对易关系:⏹该式归纳了三维转动的所有基本性质。
⏹由于不同J i不对易,三维的转动群为非Abel群。
§3.2 自旋1/2体系和有限转动一、自旋1/2体系的转动算符⏹能使角动量对易关系成立的最小维数是2.⏹电子的自旋算符:⏹容易验证S k满足角动量的对易关系,即S k可看作自旋1/2体系的J k,并且其对易关系为实验所证实。
二、转动对自旋角动量的影响⏹考虑绕Z转Φ,态的变化为:⏹物理量如S x的测量结果变为:⏹→需要计算⏹上式也可由Baker-Hausdorff引理算出:⏹由于该推导只利用了的对易关系,适用于角动量高于1/2的体系。
⏹即对自旋1/2体系有:⏹类似可得:⏹以上结果表明,转动算符作用于态矢确实使S的期待值绕z轴转了Φ角⏹即自旋算符期待值具有与经典矢量在转动下的相同变化行为:⏹R kl是对应于给定转动的3×3正交矩阵R的矩阵元⏹由于上述方法二适用于任何J,故该性质行为不限于也有: 自旋1/2体系。
力学中的角动量与转动惯量公式整理角动量和转动惯量是力学中重要的物理量,在描述物体的旋转运动和转动惯量时起着关键作用。
本文将对角动量和转动惯量的概念进行解释,并整理总结了常见的角动量与转动惯量公式,以便更好地理解和应用于力学的相关问题。
一、角动量的概念和计算方法角动量是描述物体旋转运动的物理量,它与物体的质量、速度以及物体与旋转轴的距离有关。
角动量的计算公式为:L = I * ω其中,L表示角动量,I表示转动惯量,ω表示角速度。
二、转动惯量的概念和计算方法转动惯量是描述物体抵抗转动的性质,它与物体的质量分布和旋转轴的位置有关。
转动惯量可以通过积分的方式计算得出,对于不同的物体和旋转轴位置需要使用不同的计算公式。
下面是一些常见物体的转动惯量公式:1. 点质量:对于一个质量为m的点质量,其转动惯量为:I = m * r^2其中,r表示点质量与旋转轴的距离。
2. 绕轴对称的刚体:对于一个绕轴对称的刚体,其转动惯量可以通过下面的公式计算:I = k * m * r^2其中,m表示刚体的质量,r表示质点到旋转轴的距离,k表示与旋转轴的相对位置有关的常数。
3. 绕轴的圆环:对于一个质量均匀分布在圆环上的物体,其转动惯量为:I = m * R^2其中,m表示圆环的质量,R表示圆环的半径。
4. 绕轴的圆盘:对于一个质量均匀分布的圆盘,其转动惯量为:I = (1/2) * m * R^2其中,m表示圆盘的质量,R表示圆盘的半径。
5. 绕轴的长杆:对于一个质量均匀分布的长杆,其转动惯量为:I = (1/12) * m * L^2其中,m表示长杆的质量,L表示长杆的长度。
三、常见角动量与转动惯量问题的应用角动量和转动惯量在力学中有着广泛的应用,下面举几个常见的例子:1. 转动惯量的变化对旋转运动的影响:转动惯量越大,物体的旋转惯性越大,对外力的抵抗力度越大,因此转动惯量的变化会影响物体的旋转速度和旋转动能的变化。
2. 旋转运动中角动量守恒定律:当物体在没有外力作用下绕某一轴旋转时,其角动量大小保持不变。
理论物理极础10:泊松括号,⾓动量和对称性莱尼问:“乔治,我们能⽤括号钓鱼吗?”乔治笑答:“能,但只能钓理论鱼。
”⼒学公理化形式我们抽象出⼀套规则来玩泊松括号,⽽不是计算泊松括号。
你可以检验⼀下这些规则。
设 \(A\)、\(B\) 和 \(C\) 都是 \(p\) 和 \(q\) 的函数,根据的内容,我们可以定义泊松括号:\begin{equation} \{A,C\} = \sum_i \left ( \frac{\partial A}{\partial q_i}\frac{\partial C}{\partial p_i} - \frac{\partial A}{\partial p_i}\frac{\partial C} {\partial q_i} \right ) \label{eq1} \end{equation}泊松括号如下性质:反对称性:交换两个函数,泊松括号改变符号:\begin{equation} \{A,C\} = -\{C,A\} \label{eq2} \end{equation}特别地,两个同样的函数的泊松括号的运算结果为0:\begin{equation} \{A,A\} = 0 \label{eq3} \end{equation}线性。
线性带来两个性质。
第⼀,如果函数 \(A\) 乘上⼀个常数 \(k\),则泊松括号的结果也乘上该常数:\begin{equation} \{kA,C\}=k\{A,C\} \label{eq4} \end{equation}第⼆,两个函数的和 \(A+B\) 与第三个函数 \(C\) 的泊松括号等于 \(A\) 和 \(B\) 分别与 \(C\) 的泊松括号的和:\begin{equation} \{A+B,C\} = \{A,C\} + \{B,C\} \label{eq5} \end{equation}两个函数的积 \(AB\) 与第三个函数 \(C\)的泊松括号满⾜如下关系:\begin{equation} \{AB,C\} = B\{A,C\} + A\{B,C\} \label{eq6} \end{equation}这个关系可由求导规则得到:\begin{equation*}\frac{\partial (AB)}{\partial q} = B \frac{\partial A}{\partial q} + A \frac{\partial B}{\partial q}\end{equation*}对 \(p\) 求导也有类似结果。