第三节串联校正装置的设计 自动控制原理课件
- 格式:ppt
- 大小:1.80 MB
- 文档页数:60

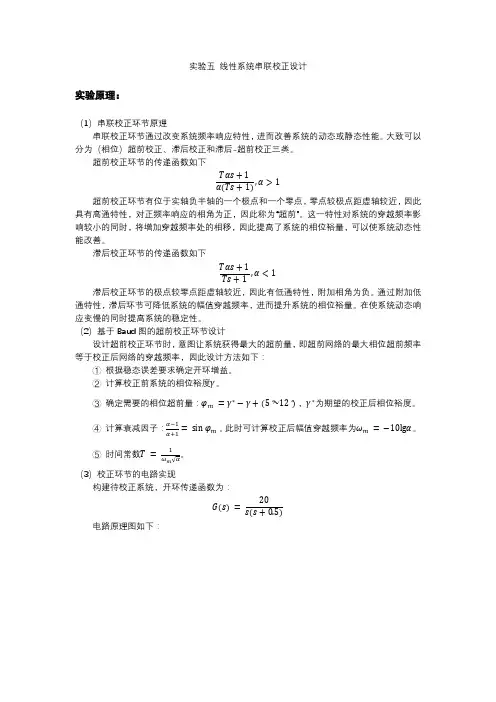
实验五线性系统串联校正设计实验原理:(1)串联校正环节原理串联校正环节通过改变系统频率响应特性,进而改善系统的动态或静态性能。
大致可以分为(相位)超前校正、滞后校正和滞后-超前校正三类。
超前校正环节的传递函数如下Tαs+1α(Ts+1),α>1超前校正环节有位于实轴负半轴的一个极点和一个零点,零点较极点距虚轴较近,因此具有高通特性,对正频率响应的相角为正,因此称为“超前”。
这一特性对系统的穿越频率影响较小的同时,将增加穿越频率处的相移,因此提高了系统的相位裕量,可以使系统动态性能改善。
滞后校正环节的传递函数如下Tαs+1Ts+1,α<1滞后校正环节的极点较零点距虚轴较近,因此有低通特性,附加相角为负。
通过附加低通特性,滞后环节可降低系统的幅值穿越频率,进而提升系统的相位裕量。
在使系统动态响应变慢的同时提高系统的稳定性。
(2)基于Baud图的超前校正环节设计设计超前校正环节时,意图让系统获得最大的超前量,即超前网络的最大相位超前频率等于校正后网络的穿越频率,因此设计方法如下:①根据稳态误差要求确定开环增益。
②计算校正前系统的相位裕度γ。
③确定需要的相位超前量:φm=γ∗−γ+(5°~12°) ,γ∗为期望的校正后相位裕度。
④计算衰减因子:α−1α+1= sin φm。
此时可计算校正后幅值穿越频率为ωm=−10lgα。
⑤时间常数T =ω√α。
(3)校正环节的电路实现构建待校正系统,开环传递函数为:G(s)=20s(s+0.5)电路原理图如下:校正环节的电路原理图如下:可计算其中参数:分子时间常数=R1C1,分母时间常数=R2C2。
实验记录:1.电路搭建和调试在实验面包板上搭建前述电路,首先利用四个运算放大器构建原系统,将r(t)接入实验板AO+和AI0+,C(t)接入AI1+,运算放大器正输入全部接地,电源接入±15V,将OP1和OP2间独立引出方便修改。
基于另外两运算放大器搭建校正网络,将所有电容值选为1uF,所有电阻引出方便修改。
实验六 控制系统串联校正装置的设计一、实验目的应用频率校正法,对给定系统进行串联校正设计,并在模拟学习机上加以实现,验证设计的正确性。
二、实验仪器设备(1)AC -1自动控制综合实验仪 一台(2)数字计算机(配有AD/D 卡) 一台(3)数字万用表 一块三、设计任务与要求1. 已知单位反馈系统的开环传递函数为:)1()(0+=s s K s G 当输入信号r (t) = 1时,要求:稳态误差0.1ss e ≤;开环截止频率4.4'0≥ω(rad/s );相角裕度045'≥γ;幅值裕度dB h 10'≥,试设计系统的串联超前校正装置。
2. 已知单位反馈系统的开环传递函数为:)12.0)(11.0()(0++=s s s K s G 要求:校正后系统的静态速度误差等于30(1/s );相角裕0'40≥γ;幅值裕度dB h 10'≥,开环截止频3.2'0≥ω(rad/s );试设计系统的串联滞后校正装置。
四、实验内容(1)为了满足系统给出的开环截止频率和相角裕度的要求,利用数字计算机进行频率特性的计算,选择校正网络的参数、电容和电阻值。
(2)将设计的校正装置接入系统中,观察校正后系统的阶跃响应曲线,并检验是否满足给定的性能指标要求。
(3)若校正后,系统性能指标未达到给定的要求,应适当调节校正装置中的电阻,直至各项性能指标均满足要求为止。
如果调节电阻无法达到,则需重新设计。
(4)应用MATLAB 软件的SIMULINK 仿真环境对校正前后的系统进行仿真,计算频率特性,并与实验结果进行比较。
五、实验报告要求(1)实验完毕,利用实验数据文件,按实验指导老师的要求打印部分实验曲线,以便完成实验报告。
(2)给出校正前后系统的传递函数及其模拟电路;(3)根据校正装置设计的要求给出设计过程;(4)根据系统校正前后的阶跃响应曲线,分析校正的作用及特点。
学号天津城建大学自动控制原理A课程设计说明书串联校正装置的设计起止日期:2013 年12 月30 日至2014 年1 月3 日学生姓名班级成绩指导教师(签字)控制与机械工程学院2014年1 月3 日天津城建大学 课程设计任务书2013 —2014 学年第 1 学期控制与机械工程 学院 电气工程及其自动化 专业 电气2013级12班 课程设计名称: 自动控制原理A 课程设计 设计题目: 串联校正装置的设计完成期限:自 2013 年12 月 30 日至 2014 年 1 月 3 日共 1 周 设计依据、要求及主要内容:已知单位反馈系统的开环传递函数为:)12.0)(11.0()(++=s s s Ks G要求校正后系统的速度误差系数130-≥s k v ,相角裕度 35≥γ,幅值裕度dB h 12≥,试设计串联校正装置。
基本要求:1、对原系统进行分析,绘制原系统的单位阶跃响应曲线,2、绘制原系统的Bode 图,确定原系统的幅值裕度和相角裕度。
3、绘制原系统的Nyquist 曲线。
4、绘制原系统的根轨迹。
5、设计校正装置,绘制校正装置的Bode 图。
6、绘制校正后系统的Bode 图、确定校正后系统的幅值裕度和相角裕度。
7、绘制校正后系统的单位阶跃响应曲线。
8、绘制校正后系统的Nyquist 曲线。
9、绘制校正后系统的根轨迹。
指导教师(签字): 系主任(签字): 批准日期:2013年12月8日目录一、绪论 (1)二、原系统分析 (2)2.1 原系统的单位阶跃响应曲线 (2)2.2 原系统的Bode图 (3)2.3 原系统的Nyquist曲线 (4)2.4 原系统的根轨迹 (5)三、校正装置设计 (7)3.1 校正方案的确定 (7)3.2 校正装置参数的确定 (7)3.3 校正装置的Bode图 (7)四、校正后系统的分析 (9)4.1校正后系统的单位阶跃响应曲线 (9)4.2 校正后系统的Bode图 (9)4.3 校正后系统的Nyquist曲线 (10)4.4 校正后系统的根轨迹 (11)4.5校正后系统的Simulink仿真框图 (13)五、总结 (14)六、参考文献 (15)一、绪论所谓校正,是在系统中,往往需要加入一些校正装置来增加系统的灵活性,使系统发生变化,从而满足给定的各项性能指标。