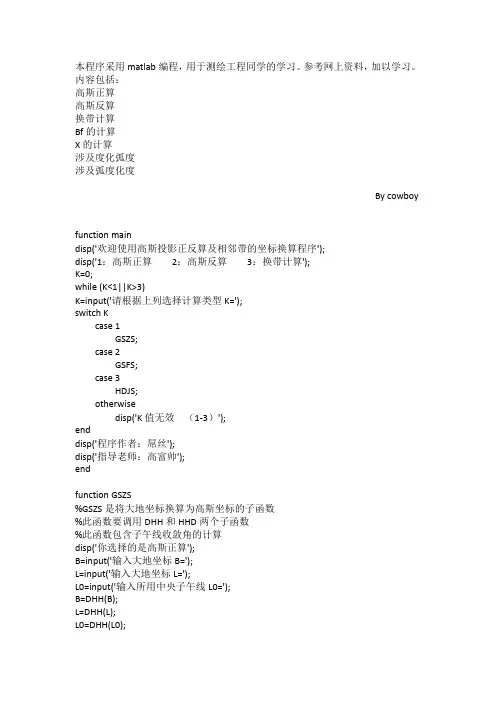
基于matlab的坐标正反算
- 格式:docx
- 大小:18.74 KB
- 文档页数:5
matlaby轴反向Matlab是一种非常强大的科学计算软件,广泛应用于各种领域,包括工程、物理、数学以及计算机科学等。
然而,在使用Matlab进行数据分析和可视化的过程中,我们可能会遇到一种问题:Matlab的坐标轴是反向的。
这个问题在Matlab R2014b之后的版本中经常出现,这是由于Matlab向新的图形系统转型导致的。
本文将详细介绍如何解决Matlab坐标轴反向的问题。
第一步:了解Matlab的坐标轴系统在Matlab中,坐标轴是用于表示二维或三维空间中的点坐标的系统。
在二维平面中,Matlab的坐标轴系统通常由x轴、y轴组成。
其中,x轴表示水平方向的坐标,取值范围一般为从左到右递增的数值;y轴表示垂直方向的坐标,取值范围一般为从下到上递增的数值。
在三维空间中,坐标轴由x轴、y轴、z轴组成,分别表示三个方向的坐标。
第二步:解决Matlab坐标轴反向的问题在Matlab中,坐标轴反向通常是指坐标轴的取值方向与预期方向不一致。
在做图时,这种问题可能导致数据难以理解,给数据分析带来不便。
下面是几种解决Matlab坐标轴反向的方法。
方法一:使用axis命令axis命令是Matlab中常用的调整坐标轴参数的命令。
可以使用axis命令来手动重置坐标轴的范围和方向。
例如:axis([xmin xmax ymin ymax])该命令可以控制x轴或y轴的坐标轴方向、坐标轴范围和间隔等参数。
假设要将x轴的方向反向,则可以使用以下代码:x = linspace(0,10,100);y = sin(x);plot(x,y);axis([10 0 -1 1]);这样就可以将x轴的方向反向,从右到左进行显示。
方法二:使用set命令set命令是Matlab中用于修改众多图形对象属性的命令。
可以使用set命令来更改图形对象的属性,如坐标轴方向、坐标轴范围、坐标轴标签等。
为了实现反向功能,可以使用set命令来更改坐标轴的XDir或YDir属性。
测量程序设计实验报告实验名称:坐标正反算实验三坐标正反算一、实验目的编写坐标正反算程序,并对格式化文件数据进行计算,验证程序。
二、实验内容1、编写坐标正算程序1)建立以xy_direct命名的函数,函数输入输出格式为[x2,y2] = xy_direct(x1,y1,distance, azimuth)度转度分秒:>> function dms= degree2dms(jiaodu)>>degree = fix(jiaodu);>>mimute = fix((jiaodu-degree)*60);>>second = ((jiaodu-degree)*60-mimute)*60;>>dms = degree+mimute/100+second/10000;度分秒转度:>> function degree = dms2degree(jiaodu)>>degree = fix(jiaodu);>> mimute = fix((jiaodu-degree)*100);>>second = (jiaodu-degree-mimute/100)*10000;>>degree = degree+mimute/60+second/3600;弧度转度:>> function dms=rad2dms(rad)>> rad=abs(rad);>> jiaodu=rad*180.0/pi;>> % l=fix(a)>> % b=(a-l)*60.0>> % m=fix(b)>> % a=l+m/100.0+(b-m)*0.006>> % if(rad<0)>> % dms=-a;>> % else>> % dms=a;>> % end>> degree = fix(jiaodu);>> mimute = fix((jiaodu-degree)*60);>> second = ((jiaodu-degree)*60-mimute)*60;>> dms = degree+mimute/100+second/10000;>> if(rad<0)dms=-dms;elsedms=dms;endreturn>> function [x2,y2] = xy_direct(x1,y1,distance, azimuth)>>x2=x1+distance.*cos(azimuth*pi/180);>>y2=y1+distance.*sin(azimuth*pi/180);>>end2) 对文件data1.txt中数据进行坐标正算,并将已知点和计算点坐标按照格式存贮在文件data2.txt中,data1.txt格式为: x1 y1 距离方位角(dd.mmss)data2.txt格式为:x1 y1 x2 y2>> [filename,pathname]=uigetfile;>> file=[pathname,filename];>> data=importdata(file);>> %[x1,y1]=data.data(:,[1,2]);>> azimuth=dms2degree(data.data(:,4));>> distance=data.data(:,3);>> %[x2,y2]=xy_direct(x1,y1,distance,azimuth);>>[x2,y2]=xy_direct(data.data(:,1),data.data(:,2),distance,azimuth); >> [filename_out,pathname_out]=uiputfile;>> fileout=[pathname_out,filename_out];>> fid=fopen(fileout,'wt');>> fprintf(fid,'x1 y1 x2 y2\n');>> fprintf(fid,'%8.2f %8.2f %8.2f %8.2f\n',[data.data(:,1:2),x2,y2]); >> fclose('all')ans =2、编写坐标反算程序1)建立以xy_inv命名的函数,函数输入输出格式为[distance, azimuth] = xy_inv(x1,y1, x2,y2)>> function [distance, azimuth] = xy_inv(x1,y1, x2,y2)>> delt_x=x2-x1;>> delt_y=y2-y1;>> [m,x]=size(delt_x);>> azimuth=zeros(0,m);>> for i=1:mazimuth_temp=atan2(abs(delt_y(i)),abs(delt_x(i)));if delt_x(i)>0&&delt_y(i)>0azimuth(i)=azimuth_temp;elseif delt_x(i)>0&&delt_y(i)<0azimuth(i)=2*pi-azimuth_temp;elseif delt_x(i)<0&&delt_y(i)>0azimuth(i)=pi-azimuth_temp;else delt_x(i)<0&&delt_y(i)<0;azimuth(i)=pi+azimuth_temp;endend>> azimuth=rad2dms(azimuth)>> distance=sqrt((x2-x1).^2+(y2-y1).^2);>> %fprintf('两点间距离:%8.3f ;方位角为:%8.3f',distance,azimuth);2) 对文件data2.txt中数据进行坐标反算,并将计算结果按照格式存贮在文件data3.txt中,Data3.txt格式为: x1 y1 x2 y2 距离方位角(dd.mmss)>> [filename,pathname] = uigetfile;>>file = [pathname, filename];>>data=importdata(file);>> [distance, azimuth] =xy_inv(data.data(:,1),data.data(:,2),data.data(:,3),data.data(:,4)); >> [filename_out,pathname_out] = uiputfile;>>fileout = [pathname_out, filename_out];>>fid = fopen(fileout,'wt');>>fprintf(fid,' x1 y1 x2 y2 距离方位角(dd.mmss)\n'); >>fprintf(fid,'%8.2f %8.2f %8.2f %8.2f %8.2f %8.4f\n',[dat a.data(:,1:4),distance,azimuth']');>>fclose('all');3、可能用到的函数开根号,sqrt(x)sin(rad)、cos(rad)、atan2(y,x),find。
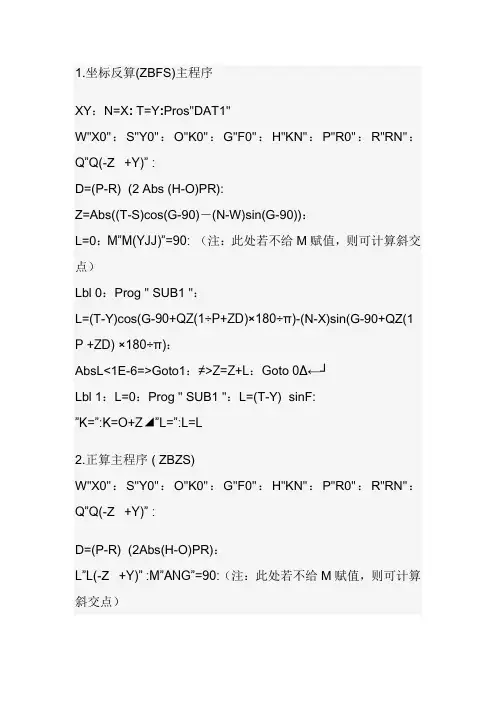
1.坐标反算(ZBFS)主程序XY:N=X: T=Y:Pros"DAT1"W"X0":S"Y0":O"K0":G"F0":H"KN":P"R0":R"RN":Q”Q(-Z +Y)” :D=(P-R)÷(2 Abs (H-O)PR):Z=Abs((T-S)cos(G-90)-(N-W)sin(G-90)):L=0:M”M(YJJ)”=90: (注:此处若不给M赋值,则可计算斜交点)Lbl 0:Prog " SUB1 ":L=(T-Y)cos(G-90+QZ(1÷P+ZD)×180÷π)-(N-X)sin(G-90+QZ(1÷P +ZD) ×180÷π):AbsL<1E-6=>Goto1:≠>Z=Z+L:Goto 0Δ←┘Lbl 1:L=0:Prog " SUB1 ":L=(T-Y)÷sinF:”K=”:K=O+Z◢”L=”:L=L2.正算主程序 ( ZBZS)W"X0":S"Y0":O"K0":G"F0":H"KN":P"R0":R"RN":Q”Q(-Z +Y)” :D=(P-R)÷(2Abs(H-O)PR):L”L(-Z +Y)” :M”ANG”=90:(注:此处若不给M赋值,则可计算斜交点)Z=Abs(K-O):Prog"SUB1":”FWJ=”:F=F-M:”X=”:X=X◢”Y=”:Y=Y3.正算子程序(SUB1)Defm4:A=0.1184634425:B=0.2393143352:Z[4]=0.2844444444:C=0.046910 0770:E=0.2307653449:Z[1]=0.5:X=W+Z(Acos(G+QCZ(1÷P+CZD)×180÷π)+Bcos(G+QEZ(1÷P+EZD)×180÷π)+Z[4]cos(G+QZ[1]Z(1÷P+Z[1]ZD)×180÷π)+Bcos(G+Q(1-E)Z(1÷P+(1-E)Z D)×180÷π)+Acos(G+Q (1-C)Z(1÷P+(1-C)ZD) ×180÷π)):Y=S+Z(Asin(G+QCZ(1÷P+CZD)×180÷π)+Bsin(G+QEZ(1÷P+EZD)×180÷π) +Z[4]sin(G+QZ[1]Z(1÷P+Z[1]ZD)×180÷π)+Bsin(G+Q(1-E)Z(1÷P+(1-E)ZD)×180÷π)+Asin(G+Q (1-C)Z(1÷P+(1-C)ZD) ×180÷π)):F=G+QZ(1÷P+ZD) ×180÷π+M:X=X+LcosF:Y=Y+LsinF4.曲线元要素数据库:DAT-01K≥O=>K<H=> W=**:S=**:O=**:G=**:H=**:P=**:R=**:Q=**⊿⊿←┘K≥O=>K<H=> W=**:S=**:O=**:G=**:H=**:P=**:R=**:Q=**⊿⊿←┘K≥O=>K<H=> W=**:S=**:O=**:G=**:H=**:P=**:R=**:Q=**⊿⊿←┘K≥O=>K<H=> W=**:S=**:O=**:G=**:H=**:P=**:R=**:Q=**⊿⊿←2、输入与显示说明(1)输入部分:X0 ?线元起点的X坐标Y0 ?线元起点的Y坐标K0 ?线元起点里程F0 ?线元起点切线方位角KN ?线元终点里程R0 ?线元起点曲率半径RN ?线元止点曲率半径Q ?线元左右偏标志(左偏Q=-1,右偏Q=1,直线段Q=0)K ?正算时所求点的里程L ?正算时所求点距中线的边距(左侧取负值,右侧取正值,在中线上取零) ANG?正算边桩时左右边桩连线与线路中线的右交角X ?反算时所求点的X坐标Y ?反算时所求点的Y坐标M ? 斜交右角线元要素数据库中K≥O=>K<H=>中的O和H分别为该段线元起点里程和终点里程A、B、Z[4] 是Gauss-Legendre求积公式中的插值系数C 、E、Z[1] 是Gauss-Legendre求积公式中的求积节点(2)显示部分:X=×××正算时,计算得出的所求点的X坐标Y=×××正算时,计算得出的所求点的Y坐标K=×××反算时,计算得出的所求点的里程L=×××反算时,计算得出的所求点的边距。
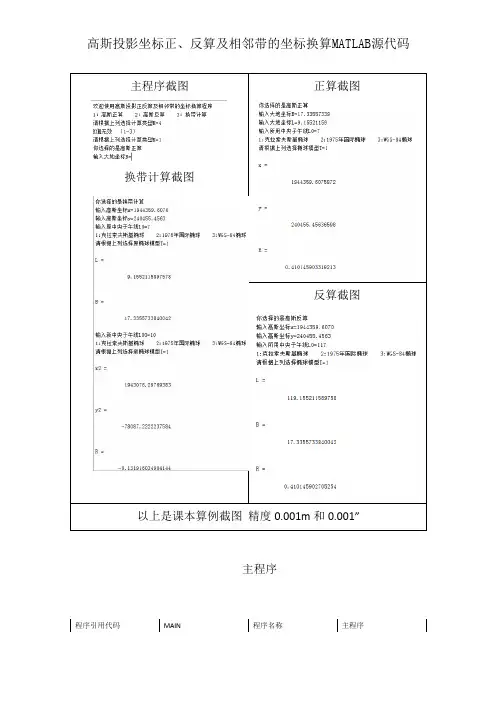
基于matlab的⾼斯投影正反算与相邻带坐标换算程序设计基于matlab的⾼斯投影正反算与相邻带坐标换算程序设
计
作者:徐翰;周强波
作者机构:核⼯业⼆三○研究所,湖南长沙410000;核⼯业⼆三○研究所,湖南长沙410000
来源:中国⽔运(下半⽉)
ISSN:1006-7973
年:2015
卷:015
期:002
页码:72-73
页数:2
中图分类:TP391
正⽂语种:chi
关键词:⾼斯投影;正算;反算;matlab
摘要:地图投影⽅法众多,常⽤的地图投影主要是⾼斯-克吕格投影和UTM投影,UTM投影属于⾼斯投影族,故对于坐标投影的坐标正反算的学习研究以⾼斯投影正反算为主,⽂中主要利⽤matlab的强⼤软件编程功能,对常⽤的⾼斯投影正反算与相邻带坐标换算进⾏程序化设计.。
matlab 坐标系解算
在MATLAB中进行坐标系解算通常涉及到地理坐标系(如经纬度)和笛卡尔坐标系(如平面或三维坐标)之间的转换。
以下是一些常见的坐标系转换方法:
1. 地理坐标系转笛卡尔坐标系(投影):
这通常涉及将地球表面的经纬度转换为平面坐标。
最常见的方法是使用某种投影方法,如墨卡托投影(Mercator projection)。
MATLAB提供了内置的地理坐标和笛卡尔坐标转换函数,如`geodetic2grid`。
2. 笛卡尔坐标系转换:
这可能涉及平移、旋转或缩放。
在MATLAB中,可以使用矩阵变换或
`rotate`等函数来完成这些操作。
3. 处理地理坐标系的不规则性:
地球是一个近似于椭球的球体,这导致地理坐标(特别是纬度)在极地区域的精度问题。
在将这些坐标转换为笛卡尔坐标时,需要考虑这些影响。
4. 处理投影失真:
不同的投影方法可能导致某些区域或类型的形状失真。
在选择合适的投影方法时,需要考虑到这种失真及其影响。
如果您有特定的坐标系转换问题或需要更具体的帮助,请提供更多细节,我会尽量提供帮助。
《数字信号处理》一、课程设计的目的及基本要求:1. 巩固所学的理论知识。
2.提高综合运用所学理论知识独立分析和解决问题的能力。
3. 更好地将理论与实践相结合。
4.掌握信号分析与处理的基本方法与实现。
5.学习并使用Matlab 语言进行编程实现课题要求。
二、课程设计内容1、 学习Matlab 软件及应用2、 学习并研究信号分析与处理课题有关理论3、利用Matlab 编程,完成相应的信号分析与处理课题4、写出课程设计报告,打印程序,给出运行结果(一) 实验目的(二)使用ztrans,iztrans 函数分别求出离散时间信号的Z 变换和逆Z 变换的结果,并用pretty 函数进行结果美化。
编写函数时养成良好的注释习惯,有利于对函数的理解。
复习MATLAB 的基本应用,如:help,可以帮助查询相关的函数的使用方法,巩固理论知识中的离散时间信号的传递函数与二次项式之间的转换。
实验项目一Z 变换(1)求)(])31()21[()(n u n x nn += Z 变换clearsyms nf=0.5^n+(1/3)^n; %定义离散信号F=ztrans(f) %z 变换pretty(F); 运算结果F(2)4)(n n x = Z 变换clearsyms nf=n^4; %定义离散信号F=ztrans(f) %Z 变换pretty(F) 运算结果(3))sin()(b an n x += Z 变换clearsyms a b nf = sin(a*n+b) %定义离散信号F=ztrans(f) %Z 变换pretty(F)运算结果实验项目二Z 反变换(1)2)2(2)(-=z z z X Z 反变换 clearsyms k zFz=2*z/(z-2)^2; %定义逆Z 变换表达式fk=iztrans(Fz,k) %逆Z 变换pretty(fk);运算结果(2)12)1()(2++-=z z z z z X Z 反变换 clearsyms k zFz=z*(z-1)/(z^2+2*z+1); %定义Z 反变换表达式fk=iztrans(Fz,k) %Z 反变换pretty(fk);运算结果f(3) 211cos 211)(---+-+=zz z z X ω Z 反变换 clearsyms k z wFz=(1+z^(-1))/(1-2*z^-1*cos(w)+z^-2); %定义Z 反变换表达式 fk=iztrans(Fz,k) %Z 反变换pretty(fk); 运算结果。
坐标正反算计算程序```pythonimport mathdef coordinate_forward(h0, l0, alpha, s):"""坐标正算函数,根据给定的起始位置和观测角度、距离计算目标位置的坐标。
:param h0: 起始位置的水平坐标。
:param l0: 起始位置的纵向坐标。
:param alpha: 观测角度,以正北方向为基准,顺时针方向为正。
:param s: 距离。
:return: 目标位置的水平坐标和纵向坐标。
"""d = math.radians(alpha)h = h0 + s * math.sin(d)l = l0 + s * math.cos(d)return h, ldef coordinate_inverse(h0, l0, h, l):"""坐标反算函数,根据给定的起始位置和目标位置的坐标计算观测角度和距离。
:param h0: 起始位置的水平坐标。
:param l0: 起始位置的纵向坐标。
:param h: 目标位置的水平坐标。
:param l: 目标位置的纵向坐标。
:return: 观测角度和距离。
"""dh = h - h0dl = l - l0s = math.sqrt(dh ** 2 + dl ** 2)alpha = math.degrees(math.atan2(dh, dl))if alpha < 0:alpha += 360return alpha, s```使用这个坐标正反算计算程序,可以简单地实现坐标的正反算。
例如:```python#坐标正算示例h0=0l0=0alpha = 45s=10h, l = coordinate_forward(h0, l0, alpha, s)print(f"目标位置坐标:h={h}, l={l}")#坐标反算示例h0=0l0=0h=5l=5alpha, s = coordinate_inverse(h0, l0, h, l)print(f"观测角度和距离:alpha={alpha}, s={s}")```这段程序中的坐标正算函数`coordinate_forward`接受起始位置的坐标`h0`和`l0`,观测角度`alpha`(以正北方向为基准,顺时针方向为正),以及距离`s`作为参数,返回目标位置的水平坐标`h`和纵向坐标`l`。
基于MATLAB的坐标转换方法研究MATLAB是一种功能强大的数值计算和数据可视化软件,在许多领域的科学研究和工程实践中得到了广泛应用。
在地理信息系统(GIS)和测量学领域,坐标转换是一项非常重要的任务,用于将不同坐标系统下的数据进行转换和分析。
本文将基于MATLAB对坐标转换方法进行研究,介绍常用的坐标转换算法和相关工具。
1.坐标系统简介坐标系统是用来描述地球表面上其中一点在地图或地理空间中的位置的系统。
常用的坐标系统包括经纬度坐标(WGS84、GCJ-02、BD-09等)和平面坐标(UTM、高斯-克吕格等)等。
不同的坐标系统有不同的表示方式和计算方法,需要进行坐标转换才能在不同系统下进行数据的一致分析。
2.坐标转换方法2.1经纬度与平面坐标的转换经纬度坐标与平面坐标之间的转换是最常见的坐标转换需求之一、可以使用常用的转换算法,如大地坐标系转平面坐标系的方法和反算方法。
对于WGS84坐标系到平面坐标系的转换,可以使用MATLAB自带的Mapping Toolbox提供的相关函数来实现。
2.2坐标系统之间的转换不同坐标系统之间的转换是另一个常见的需求。
例如,将WGS84坐标转换为中国国家测绘局发布的GCJ-02坐标以适用于在中国进行地图绘制和导航的应用。
这种转换可以使用开源的坐标转换库来实现,如proj4库,它提供了很多常用的坐标转换算法,并可以在MATLAB中进行调用。
3.MATLAB工具箱介绍在MATLAB中,有一些工具箱可以用于坐标转换。
其中最常用的是Mapping Toolbox,它提供了丰富的地图数据集、地图投影和坐标转换函数。
使用Mapping Toolbox,可以轻松实现不同坐标系统之间的转换,并进行地图绘制和数据分析。
另外,还有一些第三方工具箱可以在MATLAB中使用,如Geoprocessing Toolbox和Georeferencing Toolbox等。
这些工具箱提供了更多的转换算法和函数,满足不同的转换需求。
基于Matlab的测量坐标系统转换摘要:由于多种坐标系统的存在,在保存测量成果的过程中占用内存较大,资料管理混乱。
为保证测量成果统一和使用方便,必须进行相应的坐标转换。
坐标转换是一个复杂的数值计算过程,如果采用人工计算,不仅费时费力而且不能保证计算的精度。
Matlab软件为矩阵计算提供了平台,方便各种坐标转换模型的实现。
关键词:Matlab;测量坐标系统转换;测量系统中,通常会接触到多种坐标系统的相互转换。
以两台仪器精确互瞄法相对定向为例,测量系统中默认的测量坐标系为测站1 坐标系,即测站1为坐标系原点,测站1 与测站2 的连线在水平面内的投影为轴,轴在水平面内垂直于轴,再以右手准则确定轴。
测量系统所获取的物点坐标为空间三维直角坐标,实际应用中,需将测量坐标系中的坐标转换到其他坐标系中。
1测量坐标系简介(1)1954年北京坐标系。
1954 年北京坐标系(BJZ54)通常被称为北京54 坐标系,是通过局部平差之后所产生的坐标系。
该坐标系以克拉索夫斯基椭球为基础,大地上的任意一点均可由经度L54、纬度M54和大地高H54 进行定位描述,1954 年北京坐标系可以说是由前苏联1942 年坐标系发展延伸来的,所以它的原点不位于我国北京而位于前苏联的普尔科沃。
北京54 坐标系是我国使用较为广泛的一种参心大地坐标系。
(2)西安80坐标系。
大地原点设在位于我国中部的陕西省泾阳县永乐镇,距西安市西北方向大约60 公里。
所以被称为1980 年西安坐标系,也简称为西安大地原点。
基准面采用1985 国家高程基准,属于参心坐标系。
(3)WGS-84坐标系。
WGS-84 坐标系属于地心坐标系,是一种被国际所使用的坐标系,该坐标系原点是地球质心,其地心空间直角坐标系的Z 轴指向方向为协议地球极( 即CTP) 方向,X 轴指向与CGCS2000 X 轴指向相同,Y 轴垂直于Z 轴与X 轴所构成的平面,符合右手坐标系规律,通常被称为1984 年世界大地坐标系统。
基于matlab的大地坐标与直角坐标间的转换第一篇:基于matlab的大地坐标与直角坐标间的转换测量程序设计实验报告换算实验名称:大地坐标与空间直角坐标的实验四大地坐标与空间直角坐标的换算一、实验目的编写大地坐标与空间直角坐标相互转换的程序,并对格式化文件数据进行计算,验证程序。
二、实验内容:1、大地坐标向空间直角坐标换算转换公式:x=(N+h)cosBcosLy=(N+h)cosBsinL(1)z=[N(1-e2)+h]sinB其中:L为经度,B为纬度,h为大地高,N=a1-esinB22为卯酉圈曲率半径,e=a2-b2为第一偏心率,a为旋转椭球长半轴,b为短半轴。
aWGS84椭球参数:长半轴 a=6378137 扁率 f = 1/298.257223563 根据上式创建以geo2xyz命名的函数,函数输入输出格式为 [x, y, z] = geo2xyz(L, B, h)2、空间直角坐标向大地坐标换算根据式(1)推导大地坐标向空间直角坐标转换公式:L=arctan(y/x)z+Ne2sinBB=arctan()22x+yh=x2+y2-NcosBaz注意计算纬度时需要用到迭代,可用B=arctan()作为初始值。
22bx+y创建以xyz2geo命名的函数,函数输入输出格式为 [L, B,h] = xyz2geo(x, y, z)三、实验步骤1、大地坐标向空间直角坐标换算主程序:%%大地坐标向空间直角坐标换算%函数的输入输出格式为[x,y,z]=geo2xyz(L,B,h)[filename,pathname] = uigetfile('*.txt','请选择打开的数据文件');file = [pathname, filename];data = importdata(file);L=data.data(:,1);B=data.data(:,2);h=data.data(:,3 );[x,y,z]=geo2xyz(L,B,h);A=[x,y,z];A=A';[filename_out,pathname_o ut] = uiputfile('*.txt','请选择要输出数据文件');fileout = [pathname_out, filename_out];fid = fopen(fileout,'wt');fprintf(fid,' x y zn');fprintf(fid,'%15.7f %15.7f %15.7fn',A);close('all');函数:function [x,y,z]=geo2xyz(L,B,h)%大地坐标经纬度转换成空间直角坐标 B=dms2rad(B);L=dms2rad(L);a=6378137;%a是长半轴f=1/298.257223563;%f是扁率b=a-a*f;e=sqrt(a^2-b^2)/a;N=a./(sqrt(1-e^2.*(sin(B)).^2));%N为卯酉圈半径率,e为第一偏心率x=(N+h).*cos(B).*cos(L);y=(N+h).*cos(B).*sin(L);z=(N*(1-e^2)+h).*sin(B);endfunction rad=dms2rad(jiaodu)%度分秒->弧度(rad)degree = fix(jiaodu);mimute = fix((jiaodu-degree)*100);second =(jiaodu-degree-mimute/100)*10000;degree = degree+mimute/60+second/3600;rad=degree/180*pi;end2、空间直角坐标向大地坐标换算主程序:%% 将文件data.2.txt中的空间直角坐标系转换为大地坐标,并将计算结果按照格式存储在文件data3.txt中%data3.txt格式为:经度(ddmmss)纬度(ddmmss)大地高[filename,pathname]=uigetfile('*.txt','请选择打开的数据文件');file=[pathname,filename];data=importdata(file);x=data.data(:, 1);y=data.data(:,2);z=data.data(:,3);[L,B,H]=xyz2geo(x,y,z);[filena me_out,pathname_out] = uiputfile('*.txt','请选择要输出数据文件');fileout = [pathname_out, filename_out];fid = fopen(fileout,'wt');fprintf(fid,' 经度(ddmmss)纬度(ddmmss)大地高n');fprintf(fid,'%10.7f %10.7f %7.3fn',[L,B,H]');fclose('all');函数:function [L,B,H]=xyz2geo(x,y,z)%将直角坐标转换为大地坐标 %% 已知:WGS-84椭球参数f=1/298.257223563;%扁率f=(a-b)/a a=6378137;%长半轴b=a*(1-f);%短半轴e=(sqrt(a^2-b^2))/a;%第一偏心率%% 经度L的计算L=atan2(y,x);L=rad2dms(L);%% 纬度B的计算B0=atan2((a*z),(b.*sqrt(x.^2+y.^2)));% B初始值while 1 N=a./(sqrt(1-(e^2).*(sin(B0).^2)));%卯酉圈曲率半径N B=atan2(z+N.*(e^2).*sin(B0),(sqrt(x.^2+y.^2)));if abs(B0-B)<10^-6 break;end abs(B0-B)B0=B;end %% 大地高H的计算H=(sqrt(x.^2+y.^2))./cos(B)-N;B=degree2dms(B.*180/pi);%纬度B Endfunction dms= degree2dms(jiaodu)%度->度分秒(dd.mmss)degree = fix(jiaodu);mimute = fix((jiaodu-degree)*60);second =((jiaodu-degree)*60-mimute)*60;dms = degree+mimute/100+second/10000;第二篇:空间坐标转换说明坐标转换说明GPS接收机接收到GPS(大地坐标:经度、纬度和高度值)信号后,并不利于显示,需要将大地坐标进行转换,现选用东北天坐标系(也叫站心坐标系)作为显示的依据。
matlab函数已知纵坐标求解横坐标的方法如何使用MATLAB函数求解已知纵坐标求横坐标的方法在MATLAB中,求解已知纵坐标求横坐标的方法是一个常见的问题。
当我们需要找到某个函数曲线上特定纵坐标对应的横坐标时,MATLAB提供了一些有效的函数和技巧来帮助我们实现这一目标。
本文将介绍几种常用的方法,从简单到复杂地讨论这个主题。
1. 使用plot函数画出函数曲线我们可以使用MATLAB中的plot函数来画出给定函数的曲线。
我们想要探索函数y = f(x)在特定区间[a, b]上的曲线。
我们可以使用以下代码:```matlabx = linspace(a, b); % 生成以a为起点、b为终点的等差数列y = f(x); % 计算函数值plot(x, y); % 画出曲线```通过这个方法,我们可以直观地看到函数的曲线形状和数据分布。
在画出曲线之后,我们可以进一步使用其他方法来求解已知纵坐标求横坐标的问题。
2. 使用interp1函数进行插值接下来,我们可以使用MATLAB中的interp1函数进行插值计算。
对于已知的函数曲线上的点,我们可以使用该函数来求解某个特定纵坐标对应的横坐标。
以下是一个简单的示例:```matlabx = linspace(a, b); % 生成等差数列y = f(x); % 计算函数值xi = interp1(y, x, yi); % 在给定纵坐标yi处进行插值计算```在这个例子中,我们使用interp1函数来计算函数曲线上某个纵坐标yi对应的横坐标xi。
通过这个方法,我们可以方便地找到函数曲线上任意纵坐标的横坐标值。
3. 使用fzero函数进行数值求解如果函数曲线不是简单的连续曲线,或者我们无法通过插值方法找到满足条件的解时,我们可以使用MATLAB中的fzero函数进行数值求解。
这个函数可以帮助我们找到函数曲线与x轴的交点,进而求解特定纵坐标对应的横坐标。
以下是一个示例:```matlabx = fzero(@(x) f(x)-y, x0); % 在x0附近进行数值求解```在这个例子中,我们使用fzero函数来找到函数曲线与x轴的交点,其中函数值f(x)减去给定的纵坐标y趋近于零。
测量程序设计实验报告
实验名称:坐标正反算
实验三坐标正反算
一、实验目的
编写坐标正反算程序,并对格式化文件数据进行计算,验证程序。
二、实验内容
1、编写坐标正算程序
1)建立以xy_direct命名的函数,函数输入输出格式为
[x2,y2] = xy_direct(x1,y1,distance, azimuth)
度转度分秒:
>> function dms= degree2dms(jiaodu)
>>degree = fix(jiaodu);
>>mimute = fix((jiaodu-degree)*60);
>>second = ((jiaodu-degree)*60-mimute)*60;
>>dms = degree+mimute/100+second/10000;
度分秒转度:
>> function degree = dms2degree(jiaodu)
>>degree = fix(jiaodu);
>> mimute = fix((jiaodu-degree)*100);
>>second = (jiaodu-degree-mimute/100)*10000;
>>degree = degree+mimute/60+second/3600;
弧度转度:
>> function dms=rad2dms(rad)
>> rad=abs(rad);
>> jiaodu=rad*180.0/pi;
>> % l=fix(a)
>> % b=(a-l)*60.0
>> % m=fix(b)
>> % a=l+m/100.0+(b-m)*0.006
>> % if(rad<0)
>> % dms=-a;
>> % else
>> % dms=a;
>> % end
>> degree = fix(jiaodu);
>> mimute = fix((jiaodu-degree)*60);
>> second = ((jiaodu-degree)*60-mimute)*60;
>> dms = degree+mimute/100+second/10000;
>> if(rad<0)
dms=-dms;
else
dms=dms;
end
return
>> function [x2,y2] = xy_direct(x1,y1,distance, azimuth)
>>x2=x1+distance.*cos(azimuth*pi/180);
>>y2=y1+distance.*sin(azimuth*pi/180);
>>end
2) 对文件data1.txt中数据进行坐标正算,并将已知点和计算点坐标按照格式存贮在文件data2.txt中,
data1.txt格式为: x1 y1 距离方位角(dd.mmss)
data2.txt格式为:
x1 y1 x2 y2
>> [filename,pathname]=uigetfile;
>> file=[pathname,filename];
>> data=importdata(file);
>> %[x1,y1]=data.data(:,[1,2]);
>> azimuth=dms2degree(data.data(:,4));
>> distance=data.data(:,3);
>> %[x2,y2]=xy_direct(x1,y1,distance,azimuth);
>>[x2,y2]=xy_direct(data.data(:,1),data.data(:,2),distance,azimuth); >> [filename_out,pathname_out]=uiputfile;
>> fileout=[pathname_out,filename_out];
>> fid=fopen(fileout,'wt');
>> fprintf(fid,'x1 y1 x2 y2\n');
>> fprintf(fid,'%8.2f %8.2f %8.2f %8.2f\n',[data.data(:,1:2),x2,y2]); >> fclose('all')
ans =
2、编写坐标反算程序
1)建立以xy_inv命名的函数,函数输入输出格式为
[distance, azimuth] = xy_inv(x1,y1, x2,y2)
>> function [distance, azimuth] = xy_inv(x1,y1, x2,y2)
>> delt_x=x2-x1;
>> delt_y=y2-y1;
>> [m,x]=size(delt_x);
>> azimuth=zeros(0,m);
>> for i=1:m
azimuth_temp=atan2(abs(delt_y(i)),abs(delt_x(i)));
if delt_x(i)>0&&delt_y(i)>0
azimuth(i)=azimuth_temp;
elseif delt_x(i)>0&&delt_y(i)<0
azimuth(i)=2*pi-azimuth_temp;
elseif delt_x(i)<0&&delt_y(i)>0
azimuth(i)=pi-azimuth_temp;
else delt_x(i)<0&&delt_y(i)<0;
azimuth(i)=pi+azimuth_temp;
end
end
>> azimuth=rad2dms(azimuth)
>> distance=sqrt((x2-x1).^2+(y2-y1).^2);
>> %fprintf('两点间距离:%8.3f ;方位角为:%8.3f',distance,azimuth);
2) 对文件data2.txt中数据进行坐标反算,并将计算结果按照格式存贮在文件data3.txt中,
Data3.txt格式为: x1 y1 x2 y2 距离方位角(dd.mmss)
>> [filename,pathname] = uigetfile;
>>file = [pathname, filename];
>>data=importdata(file);
>> [distance, azimuth] =
xy_inv(data.data(:,1),data.data(:,2),data.data(:,3),data.data(:,4)); >> [filename_out,pathname_out] = uiputfile;
>>fileout = [pathname_out, filename_out];
>>fid = fopen(fileout,'wt');
>>fprintf(fid,' x1 y1 x2 y2 距离方位角(dd.mmss)\n'); >>fprintf(fid,'%8.2f %8.2f %8.2f %8.2f %8.2f %8.4f\n',[dat a.data(:,1:4),distance,azimuth']');
>>fclose('all');
3、可能用到的函数
开根号,sqrt(x)
sin(rad)、cos(rad)、atan2(y,x),find。