矩阵变换器研究综述
- 格式:doc
- 大小:115.00 KB
- 文档页数:13

矩阵式变频器原理及其电气应用前景【摘要】矩阵式变频器是一种新型的交- 交直接电力变换器,本文首先介绍矩阵式变频器的电路结构,然后简述两种主要的控制方法,最后通过其优点描述矩阵式变频器在电气工程领域的应用前景。
0 引言:矩阵变频器(Matrix Converter )作为一种新型的交- 交直接电力变换器,在M.Venturini 及Huber.L 各自提出两种有效的开关控制策略后,其特点已为人们所关注。
和传统的交-直- 交以及相控式交-交变频器相比,它具有如下优点:(1)无中间直流环节,能量直接传递,传输效率高;(2)可获得正弦波的输入电流和输出电压,无低次谐波,高次谐波较少;(3)输入功率因数可任意调节,且与负载功率因数无关;(4)能量可双向传递,适合四象限运行的交流传动系统;(5)控制自由度大,与相控式交- 交变频相比,输出频率不受输入电源频率的限制。
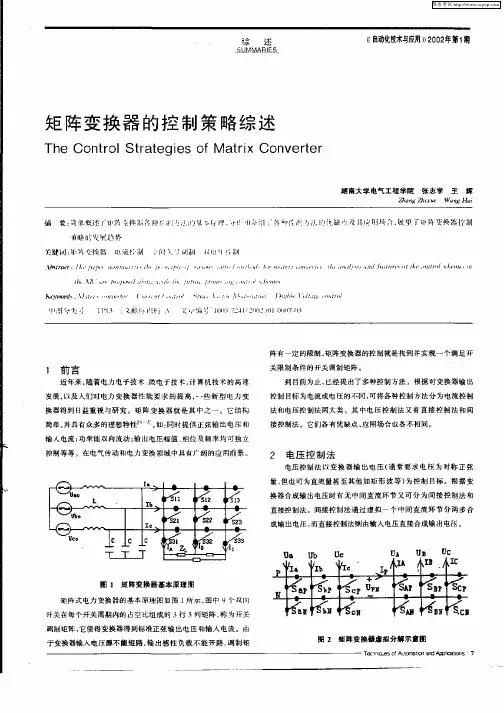
1 矩阵式变频器拓扑结构:图1 所示为三相- 三相矩阵式变频器的电路结构。
该电路拓扑中含有9个双向开关(图2)S11〜S13, S21〜S23, S31〜S33;通过对这9个双向开关的逻辑控制,可实现对电源的电压和频率的变换,从而向负载提供幅值和频率可调的电压和电流。
即:对一组频率为的三相输入电压,通过一定的规则控制变频器中的功率开关,可以合成所需频率为的三相输出电压,,式中不同的变换矩阵的确定方法就是各种矩阵式变频器的控制策略。
2 矩阵式变频器的控制原理:2.1 基于开关函数的Venturini 法:对于图1所示的三相-三相矩阵式变频器,将S11〜S13, S21〜S23,S31〜S33这9个双向开关的逻辑控制看作一个3X3的矩阵函数,则输出相电压与输入相电压之间的关系可用式1 表示。
根据矩阵理论,满足式1,式2 的矩阵和有无穷个。
基于开关函数的Venturini 法就是指在给定输入电压函数、期望输出电压函数以及各种约束条件下,得出最优化的矩阵和,使矩阵变频器中相关的一组功率开关各自的占空比由一个连续函数或分段连续函数来表示,利用精确的数学表达式来确定开关的具体动作。
机器人学变换矩阵-概述说明以及解释1.引言1.1 概述机器人学是研究机器人的机械结构、运动规划、感知与控制等方面的学科。
作为人工智能和自动化领域的重要分支,机器人学在工业、医疗、农业、航空航天等领域有着广泛的应用。
本文旨在介绍机器人学中的一个重要概念——变换矩阵。
变换矩阵能够描述机器人在三维空间中的位置和姿态,是机器人学中的核心概念之一。
通过对变换矩阵的研究,可以帮助我们更好地理解机器人的运动规划、姿态表示以及感知与控制等问题。
在本文中,我们将从机器人学基础开始,介绍机器人学的概述和机器人的运动学知识。
然后,我们将详细讨论变换矩阵的应用,包括机器人姿态表示、运动规划以及感知与控制等方面。
最后,我们将介绍变换矩阵的计算方法,包括坐标系变换、旋转矩阵与平移矩阵以及变换矩阵的乘法与逆矩阵等内容。
通过本文的阅读,读者将能够了解机器人学中的变换矩阵的概念、应用和计算方法。
同时,我们也将对变换矩阵的未来发展进行展望,并总结本文的内容。
机器人学的研究对于推动自动化技术的发展具有重要的意义,希望本文能够为读者对机器人学的研究和应用提供一定的帮助和启示。
*(请注意,以上内容仅为示例,具体内容需要根据文章内容和结构进行编写)*文章结构是指文章按照一定的组织方式和逻辑顺序来呈现内容的方式。
本文的结构如下:1. 引言1.1 概述1.2 文章结构1.3 目的2. 正文2.1 机器人学基础2.1.1 机器人学概述2.1.2 机器人运动学2.1.3 机器人学中的变换矩阵2.2 变换矩阵的应用2.2.1 机器人姿态表示2.2.2 机器人运动规划2.2.3 机器人感知与控制2.3 变换矩阵的计算方法2.3.1 坐标系变换2.3.2 旋转矩阵与平移矩阵2.3.3 变换矩阵的乘法与逆矩阵3. 结论3.1 总结3.2 对变换矩阵的展望3.3 结束语本文的结构按照从前到后的逻辑顺序组织,首先通过引言部分引入了文章的背景和目的,然后在正文部分逐步介绍了机器人学的基础知识、变换矩阵的应用以及计算方法,最后在结论部分进行总结,并对变换矩阵的未来发展进行展望,并以结束语作为文章的结尾。
基于四步换流策略的矩阵整流器的研究摘要:本文在分析比较几种换流策略的基础上,着重分析四步换流策略的优点及其安全性,并利用基于空间矢量法的四步换流策略的矩阵整流器的仿真模型,通过matlab/simulink7.0软件进行仿真。
仿真结果表明基于四步换流策略的矩阵整流器输出的电压所含谐波成分较少,畸变较小,特别在处理电流过零点的脉冲信号,四步换流策略更能做到安全换流。
基于该理论分析和仿真结果,采用可编程逻辑器件(cpld)实现,硬件电路实现结果验证了理论分析和仿真结果的正确性。
abstract: the paper analyzed and compared several commutation strategies, especially the four-step commucation strategy. then, it had been simulated by the matrix rectifier model based on space vector method in the software of matlab/simulink7.0. the results show that by using four-steps commutation strategy, the output voltage of matrix rectifier owned lower harmonic components and small distortion. it is succeed in safety current converter particularly in the procession of zero current. because of those theorists, the hardware circuit which adopted programmable logic device also proved the theoretical analysis and the simulation results are right.关键词:矩阵整流器;空间矢量调制;四步换流策略;可编程逻辑器件key words: matrix rectifier;space vector modulation;four-steps commutation strategy;programmable logic device 中图分类号:tm46 文献标识码:a 文章编号:1006-4311(2013)07-0026-030 引言矩阵整流器是一种比较新型的通用降压型三相ac-dc变换器,具有能够实现四象限运行,功率密度大,以及提供正弦的输入电压和输入电流,输入功率因数可调等优点[1-4],吸引了越来越多研究者的关注。
三相单相矩阵变换器在现代电力系统中,电能的传输和分配是至关重要的。
为了满足不同的需求,电力系统中使用了各种类型的变压器来实现电能的转换和传输。
其中,三相、单相和矩阵变换器是常用的类型之一。
三相变换器是一种用于将三相电能转换为单相电能或反之的设备。
它由三个相互连接的线圈组成,每个线圈都与电源相连。
当三相电源输入到变压器时,它会将三相电能转化为单相电能,并输出到负载中。
三相变压器通常用于工业和商业领域,因为它们能够提供大量的功率,并且可以满足大型设备的需求。
相比之下,单相变压器是一种用于将单相电能转换为三相电能或反之的设备。
它由一个主要线圈和若干个次级线圈组成。
当单相电源输入到变压器时,它会将单相电能转化为三相电能,并输出到负载中。
单相变压器通常用于家庭和小型商业领域,因为它们能够提供适量的功率,并且可以满足一般家用电器的需求。
另一种常见的变压器类型是矩阵变换器。
矩阵变换器是一种使用多个可控开关来实现电能转换的设备。
它由多个矩阵模块组成,每个模块都包含若干个开关和线圈。
当电源输入到矩阵变换器时,开关会根据控制信号的变化,将电能转换为所需的相位和电压形式,并输出到负载中。
矩阵变换器通常用于高精度电力转换和电力质量控制领域,因为它们能够提供高度可控的电能转换,并且可以满足特定的电力要求。
无论是三相变换器、单相变换器还是矩阵变换器,它们都在电力系统中扮演着重要的角色。
它们能够实现电能的转换和传输,满足不同负载的需求。
同时,它们还能够提供高效、稳定的电力供应,确保电力系统的正常运行。
三相、单相和矩阵变换器是电力系统中常用的变压器类型。
它们能够实现电能的转换和传输,满足不同负载的需求。
无论是在工业、商业还是家庭领域,它们都发挥着重要的作用。
通过合理选择和使用变压器,我们可以确保电力系统的稳定运行,为人们的生活和工作提供可靠的电力供应。
矩阵变换器安全换流策略综述矩阵变换器四步换流辅助谐振换流两步换流一步换流1引言矩阵变换器是一种具有优良的输入输出特性的交交直接变换性能优越。
它能提供正弦的输出电压,并从电网中吸收正弦的输入电流、输出频率不受输入频率的影响;具有四象限运行能力、动态响应快、功率密度大等优点。
近年来,由于其简单的拓扑结构及其优良特性,而成为变换器研究的热点之一。
目前对矩阵式变换器的研究重点之一在于双向开关的安全换流问题。
矩阵变换器的换流是指将某一相负载电流由一个输入相切换到另一个输入相。
因为开关器件的通断都是需要时间的,为了避免换流时电源短路和(感性)负载开路而对电源和矩阵变换器的安全造成的威胁,因此需要采用一个能够使开关安全切换的换流策略。
本文综述了多种形式的换流策略。
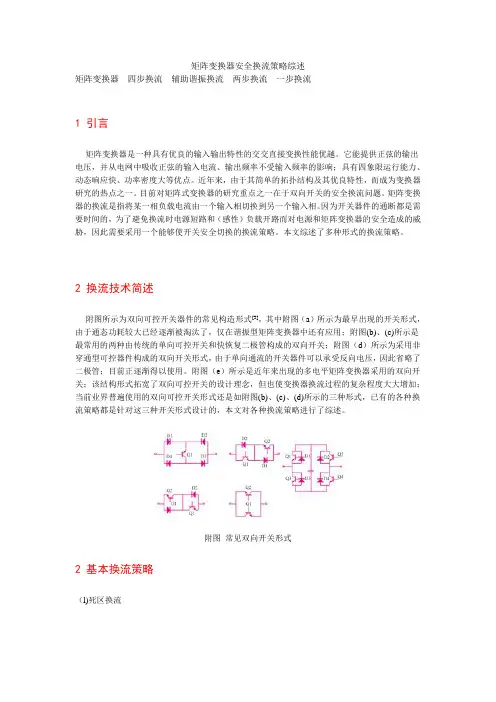
2换流技术简述附图所示为双向可控开关器件的常见构造形式[3],其中附图(a)所示为最早出现的开关形式,由于通态功耗较大已经逐渐被淘汰了,仅在谐振型矩阵变换器中还有应用;附图(b)、(c)所示是最常用的两种由传统的单向可控开关和快恢复二极管构成的双向开关;附图(d)所示为采用非穿通型可控器件构成的双向开关形式,由于单向通流的开关器件可以承受反向电压,因此省略了二极管;目前正逐渐得以使用。
附图(e)所示是近年来出现的多电平矩阵变换器采用的双向开关;该结构形式拓宽了双向可控开关的设计理念,但也使变换器换流过程的复杂程度大大增加;当前业界普遍使用的双向可控开关形式还是如附图(b)、(c)、(d)所示的三种形式,已有的各种换流策略都是针对这三种开关形式设计的,本文对各种换流策略进行了综述。
附图常见双向开关形式2基本换流策略(l)死区换流死区换流,即插入死区延时法。
它要求输入侧开关触发之前,输出侧开关关断。
这种方法控制简单,但不能工作在电流连续的情况下,且开关损耗大。
又由于死区期间电源能量得不到利用,使得电压利用率降低,另外缓冲网络比较复杂,故此法很少使用。
(2)交叠换流交叠换流要求出侧开关关断之前,输入侧开关触发。
矩阵变换器研究综述汇总引言矩阵变换器是一种广泛应用于计算机图形学、机器人学和计算机视觉等领域的数学工具。
它可以描述物体在空间中的位置、旋转、缩放和扭曲等变换,是计算机图形学中重要的基础概念之一。
本文将对矩阵变换器的研究进行综述汇总,并对其应用进行简要介绍。
矩阵变换器的基本原理矩阵变换器是基于线性代数的一种数学工具,它通过矩阵的乘法运算来描述物体在空间中的各种变换。
矩阵变换器通常由一个矩阵和一个向量组成,矩阵表示变换的方式,向量表示待变换的物体。
在二维空间中,矩阵变换器可以描述平移、旋转和缩放等变换。
平移变换可以通过对原始向量加上一个平移向量来实现,旋转变换可以通过对原始向量进行旋转角度的线性变换来实现,缩放变换可以通过对原始向量进行缩放比例的线性变换来实现。
矩阵变换器的乘法运算可以将这些变换组合起来,以实现多种复杂的变换效果。
在三维空间中,矩阵变换器可以描述平移、旋转、缩放和投影等变换。
平移、旋转和缩放的原理与二维空间中类似,而投影变换可以通过对原始向量进行投影矩阵的乘法运算来实现。
矩阵变换器的应用矩阵变换器在计算机图形学中有广泛的应用。
它可以用来实现三维模型的变换和渲染,例如将一个三维模型平移、旋转和缩放到指定位置并进行渲染。
此外,矩阵变换器还可以用来实现相机视图的变换和投影,例如将一个三维场景投影到二维屏幕上。
在机器人学中,矩阵变换器可以用来描述机器人在空间中的位置和姿态。
通过不断地更新变换矩阵,机器人可以实时地感知其在空间中的位置和姿态,并做出相应的动作。
在计算机视觉中,矩阵变换器可以用来处理图像的变换和校正。
例如,可以通过变换矩阵将一个图像中的特定区域提取出来,或者将多个图像进行叠加和融合。
矩阵变换器的改进和拓展虽然矩阵变换器已经被广泛应用于各个领域,但仍然存在一些问题和挑战,需要不断改进和拓展。
一方面,矩阵变换器在处理大规模数据时存在性能问题。
随着计算机图形学和机器人学等领域的发展,对于处理大规模三维模型和点云数据的需求越来越高。
电力电子变压器技术研究综述李鹏飞摘要:随着智能电网、能源互联网等未来电网技术的快速发展,能实现变压、电气隔离、功率调节与控制、可再生能源接入等多种功能的电力电子变压器(也称为固态变压器、智能变压器等),相关理论和技术的研究得到了越来越广泛的关注。
但是,从总体而言,PET的大规模推广应用还有诸多问题需要解决。
关键词:电力;电子变压器技术1引言电力电子变压器一般至少包括传统交流变压器的电压等级变换和电气隔离功能,此外,还包括交流侧无功功率补偿及谐波治理、可再生能源/储能设备直流接入、端口间的故障隔离功能以及与其他智能设备的通讯功能等。
需要说明的是,本文主要针对具有高压交流端口的PET相关技术进行分类研究。
2电力电子变压器的基本原理初级功率变换器、次级功率变换器以及联系初级和次级功率变换器的高频变压器来共同构成电力电子变压器。
根据电力电子变压器的输入和输出这种特点来看,也就是电力电子变压器的交交变换,电力电子变压器的基本工作原理就是输入的工频电压利用原边变换器,将工频电压转换为高频电压,利用高频变压器耦合到副边,最后再利用副边功率变换器将电压转换成所需要的高频交流电压;对电力电子变压器要减小它的体积,来增加电力电子变压器的工作频率;为了把工频交流电转换成高频交流电,这就需要使用合适的电力控制方案和现代电力电子技术,最终能够使电力电子变压器逐步的过渡成小型变压器和轻型变压器。
3电力电子变压器的优势针对传统变压器存在的上述种种缺陷和不足,近几年来国内外的科研人员提出了一种新型的变压器,即电力电子变压器PET,又被称作固态变压器SST或电子电力变压器EPT。
与传统电力变压器一样,电力电子变压器可以实现电压变换、电气隔离和电能传输,而且,它还可对其两侧的电能进行控制,对输入级电流波形和相位进行灵活而有效地控制,使输入级保持单位功率因数运行,提高运行效率,大大减小无功损耗,同时可以在输入级非正常运行时,保持三相输出电压波形的稳定与良好,另外,它重量轻、占地小,没有变压器油、不会对环境构成威胁,而且还可以瞬间关断故障电流,所以其继电保护装置相较于传统电力变压器更加简化,此外,它本身既有直流环节又有交流环节,方便各种分布式电源的接入,还可以直接进行直流供电。
中图分类号:T M346+12 文献标识码:A 文章编号:100126848(2006)0920082203变频技术中多电平电路拓扑结构研究综述赵 刚1;夏向阳2(1.广东省机电设备成套局,广州 5106512.长沙理工大学电气与信息工程学院,长沙 410077)摘 要:分析了变频技术中多电平电路拓扑结构的研究热点,指出变频技术今后的发展前景。
关键词:变频技术;P WM;多电平电路;拓扑结构;变流调速电动机Re sear ch sta tus on m u lt ileve l i nver ter topology of frequency conver sion technologyZH AO Gang 1,X I A Xiang 2yang2(1.Guangdong Complete Machine r y Equipm ent Bureau,Guangzhou 510651;2.Changsha U niversity of Science and Technology,Changsha 410077,C hina )ABSTRAC T:Frequency conversi on technol ogy is to transf or m frequency technique of AC po wer supp ly based on P WM technique .The paper intr oduced the resea r ch hotspot of m ultilevel inve rter t opol ogy and the develop ing trend of frequency conversion technol ogy .KEY W O RDS:Frequency conversi on technol ogy;P WM;Multilevel inverter ;Topol ogy;AC mot or收稿日期52825湖南省教育厅资助科研项目(6)0 引 言变频技术分为交2直2交变频和交2交变频两大类。
电力系统中的矩阵变换及其应用研究电力系统是现代社会不可或缺的基础设施,为了保障电网的稳定运行和高效性能,需要对其进行优化和控制。
矩阵变换是一种重要的数学工具,被广泛应用于电力系统的分析和设计中。
本文将着重探讨电力系统中矩阵变换的原理和应用,并介绍其在电力系统研究中的实际应用。
首先,我们需要了解矩阵变换的基本概念。
矩阵变换是将一个向量或者一个矩阵通过某个矩阵的乘法转化为另一个向量或者矩阵的过程。
在电力系统中,我们经常会遇到电压、电流、功率等参数,通过矩阵变换,可以将这些参数进行转换和分析,从而实现对电力系统的建模和控制。
一种常用的矩阵变换是离散傅立叶变换(DFT),它可以将时域信号转换为频域信号。
在电力系统中,我们经常需要对电压和电流进行频域分析,以了解系统的频率响应和谐波情况。
通过DFT,可以将电力系统的电压和电流信号转换为频域的幅值和相位信息,从而分析系统的频谱特性。
另外,矩阵变换还有一种常见的形式是矩阵微分变换。
对于电力系统中的微分方程,通过矩阵微分变换,可以将其转换为代数方程,从而简化分析的过程。
这对于电力系统的稳定性分析和控制设计非常有帮助。
例如,通过矩阵微分变换,可以将电力系统的状态空间方程转化为传递函数或者积分方程,从而利用现有的控制理论来分析和设计系统的控制器。
除了以上两种矩阵变换,还有一种重要的变换是零序变换,也称为dq变换。
在三相电力系统中,dq变换可以将三相电压和电流分解为直轴和交轴分量,从而实现对系统的分析和控制。
dq变换可以方便地进行正序、负序、零序分析,并可以提取系统中的有用信息,如电压和电流的相位、幅值和序分量等。
在电力系统的保护和控制中,dq变换有着广泛的应用。
除了上述的矩阵变换,还有其他一些相关的变换和应用,如功率变换、坐标变换等。
这些变换将电力系统中的参数进行转换和处理,从而实现对系统的分析和控制。
矩阵变换在电力系统的建模、分析和优化中起着重要的作用,是电力系统工程师必备的数学工具。
新型Buck-Boost矩阵变换器的双闭环控制策略第26卷第2期2009年2月控制理论与应用ControlTheory&Applications,b1.26No.2Feb.2009文章编号:1000—8152(2009)02--0203—06新型Buck.Boost矩阵变换器的双闭环控制策略张小平一,朱建林.,唐华平,张炳根,宋芳(1.湖南科技大学信息与电气工程学院,湖南湘潭411201;2.中南大学机电工程学院,湖南长沙4100833.湘潭大学信息工程学院,湖南湘潭411105;4.湖南交通职业技术学院机电工程系,湖南长沙410004)摘要:为了克服传统矩阵变换器电压传输比低的缺陷,提出了新型Buck.Boost矩阵变换器,采用双闭环控制策略进行控制.介绍了该控制策略的基本原理与设计方法,对比分析了该控制策略与滑模控制及离散滑模控制的各种特性,并通过仿真对其控制效果进行了验证.结果表明:该控制策略不仅具有比滑模控制和离散滑模控制更加优良的动态性能,而且还具有更强的谐波抑制能力,其输出波形的谐波失真度更小,稳态精度更高,因而具有更好的应用价值.关键词:Buck-Boost矩阵变换器:双闭环控制策略;对比分析;仿真中图分类号:TM46文献标识码:AAdouble.1oopcontrolstrategyforthenewBuck.Boostmatrixc0nverterZHANGXiao—ping,ZHUJian—lin0,TANGHua—ping,ZHANGBing—gen4,SONGFang(1.CollegeofInformationandElectricalEngineering,HunanUniversityofScienceandTech nology,XiangtanHunan411201,China;2.CollegeofMechanicalandElectricalEngineering,CentralSouthUniversity,ChangshaH unan410083,China;3.CollegeofInformationEngineering,XiangtanUniversity,XiangtanHunan411105,China ;4.DepartmentofMechanicalandElectricalEngineering,HunanCommunicationPolytechn ic,ChangshaHunan410004,China)Abstract:BecauseofthelOWvoltagetransferratioInaconventionalmatrixconverterandnoi mprovementCanbemadebyemployingdifferentcontrolstrategies,anewBuck—Boostmatrixconverterisproposedbyemployingadouble—loopcontrolstrategy.Thefundamentalprincipleofthiscontrolstrategyanditsdesignmethod areintroduced.V arious characteristicsarethencomparedamongthiscontrolstrategy,theslidingmodecontrolandth ediscreteslidingmodecontro1.Thevalidityofthiscontrolstrategyisalsotestedbysimulation.Theresultsshowthatt hedouble—loopcontrol strategymakesthesysteminbeuerdynamicperformanceandstrongerharmonicsuppression thantheslidingmodecontrolandthediscreteslidingmodecontrol,andachieveslowerharmonicdistortionandhigherstea dy—stateprecision.Theseare themostvaluableadvantagesoftheproposedconverterinengineeringapplications. Keywords:Buck?-Boostmatrixconverter;double-—loopcontrolstrategy;comparisonanalysis;simulation1引言(Introduction)矩阵变换器因具有简单的拓扑结构和一系列理想的电气特性[,,而一直成为电力电子领域研究的热点.然而由于存在电压传输比低等缺陷[3】'使其至今还未得到推广应用.为此,文【4】从改变矩阵变换器主电路拓扑结构出发进行研究,提出了一种具有高电压传输比的新型Buck-Boost矩阵变换器(Buck—Boostmatrixconve~er,BBMC)的主电路拓扑结构.并且针对该拓扑结构的逆变级,提出采用滑模控制策略进行控制,取得了较好的效果.但该控制策略存在开关频率不固定以及因未能实现对电感电流的直接控制而在系统出现异常时可能导致控制失败等缺收稿日期:2007—01—17;收修改稿日期:2007—09--25基金项目:国家自然科学基金资助项目(5O575228).点.文[5】针对BBMC提出采用离散滑模控制策略,虽有效解决了开关频率不固定的问题,但仍未能实现对电感电流进行直接控制.本文为此提出采用双闭环控制策略对其进行控制,则有效解决了上述问题.文中对该控制策略的基本原理与设计方法进行了说明,对其控制效果进行了仿真研究,并与滑模控制及离散滑模控制所具有的不同特点进行了对比分析.2BBMC拓扑结构简介(Briefintroductionon topologyofBBMC1三相一三相BBMC的拓扑结构如图1所示【4】.该结构采用AC—DC—AC两级变换器的结构形式,中间直控制理论与应用第26卷流环节无储能元件:其整流级为一个3/2相矩阵变换器,逆变级则采用三相Buck—Boost逆变器的结构形式,它由3个电流可双向流动的Buck—BoostDC—DC变换器组成;三相负载采用y型连接,跨接于三相逆变器的输出端.,,pf<D0}D_丰D卜一l£:赢,Rt_r,广'广,1LI''Iifl3VVV}●2^^t,s'f,c丰(,=一I卜——V,..L-==-1三相一=相BBMC拓扑结构Fig.1Thetopologyofthreephase—threephaseBBMC 3BBMC控制策略研究(Studyonthecontrol strategyofBBMC)根据BBMC在结构和功能上分为整流级和逆变级两部分并可独立控制的特点,分别对其研究采用了不同的控制策略.3.1整流级控制策略(Thecontrolstrategyofthe rectifier)BBMC的整流级采用无零矢量的空间矢量调制策略[6]6.设三相输入电源电压为fu:UmCOS0=gmcos(wt),{=c.s=cOS(—27r),(1)Uc=c.s.=c.s(ut+277).其中:为输入角频率,为输入相电压幅值.根据文献【6】,在保证单位输入功率因数的条件下,在一个PWM开关周期内整流输出电压的局部平均值为UdcD3Gn,(2)其中COS0.=max(Icos0I,lCOS0bl,ICOS.I)3.2逆变级控制策略(Thecontrolstrategyofthe inverter)先简要介绍一下滑模控制与离散滑模控制的主要特点及基本原理,再重点分析双闭环控制策略的工作原理与设计方法.3.2.1滑模控制与离散滑模控制简介(Briefintro—ductiononslidingmodecontrolanddiscrete slidingmodecontro1)滑模控制的主要特点在于它对系统的模型误差和参数变化具有鲁棒性【4j.其基本工作原理是:以逆变器中电容电压与电感电流为状态变量,由状态变量与其参考值的偏差的线性组合构建滑模面函数.在实际应用中,该滑模面函数由硬件电路实现,由硬件电路产生的滑模信号加到一个滞环比较器,由其产生控制信号来控~JlJBuck—Boost变换器中的功率开关,通过调节状态变量的大小使滑模面函数维持在零附近,从而实现输出电压对其参考信号的准确跟踪.离散滑模控制相对于滑模控制的主要特点在于它使系统具有固定的开关频率【,.该控制策略通过将逆变级状态方程离散化而得到其差分方程,根据设定的输出变量函数及其参考输出函数而得到系统的跟踪误差,结合该跟踪误差所满足的2阶动态差分方程及滑模存在条件可得到系统的离散滑模面方程,据此可实现针对逆变级状态变量的离散滑模控制.3.2.2双闭环控制的基本原理与设计方法(The fundamentalprincipleofdouble—loopcontrol anditsdesignmethod)[】该控制策略通过两个控制闭环实现对Buck.Boost变换器中两个状态变量的解耦控制,不仅控制方案简单,而且由于它实现了对电感电流的直接控制而使它对外部干扰具有很强的鲁棒性,即使在非线性负载,负载突变或瞬间短路等恶劣情况下也能保证系统的稳定运行,因而具有很高的可靠性.下面先基于局部平均值的概念建立其数学模型,再阐述其具体设计方法.为简化分析,以第1相Buck.BoostDC.DC变换器为例(其他两相的情况相同),其数学模型为UL1=dl瓦dc一(1一d1)"c1,icl=(1一d1)iL1+i1.(3)(4)其中:札c1和c1分别为电容1的电压和电流,札Ll和L1分别为电感1的电压和电流,_d为直流输入电压,i1为输出电流,d1为占空比,下标l表示第一相Buck.Boost变换器.电感L1和电容1的传递函数为ILl(S)一1ULl(s)rL1+L1s'Vc~(s)一1+rc1C18l(s)C1s'(5)(6)第2期张小平等:新型Buck—Boost矩阵变换器的双闭环控制策略其中1和rc1分别为电感1和电容C1的等效电阻.上述数学模型准确地描述了Buck—Boost变换器的基本特性,在此基础上提出双闭环控制策略,它由电感电流控制内环和电容电压控制外环组成.电感电流控制内环如图2所示,它以式(3)(5)为其数学模型.该控制环通过对电感电流的直接控制而达到了提高系统可靠性的目的.为简化控制方案,该控制环以电感电压为控制变量,即作为Pl控制器的输出.下面简述其基本工作原理:由图2可见,以电感电流的参考值与其实际值的偏差作为PI控制器的输入,其输出作为电感电压的参考值ULlref.由式(3)有d:.(/)1——.{)UC1十/Zdc通过上式即可求得占空tkd,将d1经限幅后作用于Buck—Boost变换器,控制其功率开关和的导通时间,从而调节电感电流使其按参考值变化.其中PI控制器可按常规方法设计,限幅环节在于避免电感电流出现异常值.图2电感电流控制内环原理框图Fig.2Schematicdiagramoftheinnercontrol loopforinductorcurrent电容电压控制外环如图3所示,它以式(4)(6)为其数学模型.该控制环的作用在于使电容电压按设定的参考值变化,从而获得所需的输出电压.同样,为简化控制方案并实现外环与内环之间的解耦控制,该控制环以电容电流为控制变量,即作为PI控制器的输出.其基本工作原理是:以电容电压的参考值与其实际值的偏差作为PI控制器的输入,其输出作为电容电流的参考值ic1.由式(4)可得:Llref=.(8)zL=———一.【)通过上式即可求得内环电感电流的参考值.但式中占空比d1由控制内环确定,为实现外环与内环之间的解耦控制,(1一d1可由下式近似表示.1一d1≈—.f9)'UC1+Udc将产生的电感电流参考值经限幅后作用于控制内环,进而通过改变占空Lkd调节电感电流和电容电压,使电容电压按设定的参考值变化,从而达到控制输出电压的目的图3电容电压控制外环原理框图Fig.3Schematicdiagramoftheoutercontrol loopforcapacitorvoltage4仿真分析(Simulationandanalysis)为验证双闭环控制策略的控制效果并便于同滑模控制及离散滑模控制进行对比分析,采用MATLAB对上述3种控制策略同时进行仿真研究. 假设三相输入电源,功率开关,电感及电容等均为理想元件.仿真参数设置如下:输入为对称三相电源,其相电压有效值与频率分别取:220V/50Hz;电感与电容分别取:Li=450H,=70F,i=l--,3;采用三相对称阻感负载,其电阻和电感分别为:R7:50Q,Lj=300H,j=l^一3;滑模控制系数取:1=0.1,k2=0.09;2阶差分方程参数取:A=一1.89,2=0.89;电压控制环PI控制器参数取:kP=5.5,kI=8X10.4;电流控制环PI控制器参数取:kp=50,kI=1.24X10-4; PWM开关频率取20kHz.为验证BBMC变压变频的性能,仿真分稳态分析和动态分析两种情况进行:4.1稳态分析(Steady—stateanalysis)稳态分析在于验证系统对频率与幅值固定的参考信号的跟踪情况.任取参考信号分别为450v/75Hz及150V/25Hz(对应于相电压幅值/频率).仿真波形如图4--,6所示.其中图4为a相输入电压u与输入电流i..的波形,由于滤波电容的作用,使i的相位略超前札.;图5和图6~,fJ分别为参考电压设为450V/75Hz和150V/25Hz时对应于3种控制策略的三相输出电压仿真波形:仿真结果分别见表1和表2,其中THD表示总谐波失真度.\-日一\t|S图4a相输入电压与输入电流波形Fig.4Thesimulationwaveformsofaphase voltageandcurrent控制理论与应用第26卷>\(a)滑模控制t|s(b)离散滑模控制t}s(C)双闭环控制图5参考电压设为450V/75Hz时的三相电压波形Fig.5Thesimulationwaveformsofthree-phaseoutput voltageunderexpectoutput450V/75Hzt/S(a)滑模控制(b)离散滑模控制t{S(C)双闭环控制图6参考电压设为150V/25Hz时的三相电压波形Fig.6Thesimulationwaveformsofthree—phaseoutput voltageunderexpectoutput150V/25Hz表1参考电压设为450V/75Hz时的仿真结果Table1Thesimulationresultsunderexpectoutput450f]5Hz控制方式电压,频率/THD滑模控制449.2v,75Hz/1.74%离散滑模控制457.8v,75Hz/1.24%双闭环控制448.9V/75Hz/0.53%表2参考电压设为150V/25Hz时的仿真结果Table2Thesimulationresultsunderexpectoutput150V/25Hz控制方式电压,频率/THD滑模控制148.3V/25Hz/1.71%离散滑模控制149.3V/25Hz/0.98%双闭环控制148.7V,25H.60%4.2动态分析(Dynamic—stateanalysis)动态分析在于验证系统在运行中当参考信号或负载发生突变时的运行情况,以此来评价系统的动态性能.仿真分两种情况进行:第1种情况负载不变,参考信号发生突变.如取参考信号由311V/50Hz突变至150V/25Hz,又突变至450v/75Hz.仿真波形如图7所示.第2种情况参考信号不变,负载发生突变.如取参考信号为311V/50Hz,负载电阻由50Q突变至25又回~mJ5oQ,相应的输出相电压与相电流波形如图8所示.500>—500500>,0—5001/S(a)滑模控制00.010.020.O30.040.050.O6t|S(b)离散滑模控制00.0l0.020.030.040.050.06t/s(C)双闭环控制图7参考信号发生突变时的三相输出电压波形Fig.7Simulationwaveformsofthree-phaseoutputvoltage forasuddenchangeinthereferencesignal第2期张小平等:新型Buck—Boost矩阵变换器的双闭环控制策略207 400>200,0一200—400400Z200,0200—400t/S(a)滑模控制4O0>2o0一20o—4oo(b)离散滑模控制:一:…………………00.O20.040.O60.08r/S00.O20,o40.O60.08t|S(C)双闭环控制图8负载电阻由50Q突变至25Q又回到5OQ时的三相输出电压波形Fig.8Simulationwaveformsofthree—phaseoutputvoltage forasuddenchangeintheloadfrom50Qto25Qandthento50Q5逆变级3种控制策略的对比分析(Comparisonofthethreecontrolstrategy fortheinverter)根据上述仿真分析及相应的仿真结果.对双闭环控制与滑模控制及离散滑模控制进行对比分析如F:1)3种控制方案的共同点:①3种控制方案均能使BBMC实现输出电压和频率的任意调节,其电压传输比既可大于1,也可小于1:且输出电压能较准确地按设定的参考值变化,输出频率和参考值基本一致.②3种控制方案均能使BBMC直接输出较标准的三相对称正弦波而无需滤波环节,谐波失真度小. 2)3种控制方案的稳态和动态性能比较:①在稳态情况下,以双闭环控制对应输出波形的谐波失真度最小,输出波形质量最好,离散滑模控制次之,而滑模控制对应输出波形的谐波失真度最大.②动态性能方面,从输出波形的动态响应来看,滑模控制从运行开始至进入稳态之前,输出波形会出现较大的超调,过渡过程时间较长;比较而言,离散滑模控制起动过程的超调较小,过渡过程时间较短;而双闭环控制的起动过程几乎无超调,过渡过程时间很短,系统能很快进入稳定状态;当运行条件发生突变,如参考输出电压或者负载发生突变时,也有上述同样的结果.说明双闭环控制的动态特性最好, 离散滑模控制次之,而滑模控制更次之.313种控制方案其他优缺点的比较:①滑模控制的优点在于它对系统的模型误差和参数变化具有鲁棒性,另外其硬件和软件实现均较简单.其缺点在于它所涉及的相关理论较复杂,开关频率不固定,滑模控制系数的选择较困难以及由于未能实现对电感电流的直接控制而在系统出现异常情况时可能导致控制失败等;其次,其基于模拟电路的实现方式还存在易受干扰及漂移等因素影响的缺点.②离散滑模控制相对于滑模控制的主要优点在于它使系统获得了固定的开关频率,另外其基于数字式的实现方式,还使系统具有控制灵活,移植方便等优点.该控制策略的缺点同滑模控制一样,也包括它所涉及的相关理论复杂,控制参数的选择较困难以及未能实现对电感电流的直接控制而在系统出现异常时可能导致控制失败等;另外,在相同输出电压的情况下,离散滑模控制所需直流偏置电压较滑模控制和双闭环控制都要大,因而相应的开关损耗亦较大.③双闭环控制的优点在于因其实现了对电感电流的直接控制而使系统对外部干扰具有很强的鲁棒性,控制系统因而具有很高的可靠性:其次,该控制策略的基本原理和控制算法都较简单,系统设计实现均较容易等.其缺点在于相对于另外两种控制OOOll:208控制理论与应用第26卷策略来说,其控制系统每相都增加了1个电流检测模块,硬件成本略有提高.通过上述分析可见,从控制系统所获得的动态与稳态性能,系统的抗干扰能力,有关控制系统设…计与具体实现的难易等方面比较,双闭环控制策略相对于滑模控制与离散滑模控制都具有较明显的优势,因而具有更好的应用价值.6结论(Conclusion)针对为克服传统矩阵变换器电压传输比的缺陷而提出的新型Buck—Boost矩阵变换器(BBMC),提出采用双闭环控制策略进行控制.介绍了该控制策略的基本原理与设计方法,对比分析了该控制策略与滑模控制及离散滑模控制的不同特点,并对3种控制策略的控制效果进行了对比仿真分析.结果表明:双闭环控制不仅具有比滑模控制和离散滑模控制更加优良的动态性能,而且还具有更强的谐波抑制能力, 其输出波形的谐波失真度更小,稳态精度更高,因而具有更好的应用价值.参考文献(References)【1】HUBERL,BOROJEVICDSpacevectormodulatedthree—phaseto three—phasematrixconverterwithinputpowerfactorcorrection[J]. IEEETransactionsonIndustryApplications,1995,3l(6):1234—1246.[2]CASADEID,GRANDIG,SERRAG,eta1.Spacevectorcontrol ofmatrixconverterswithunityinputpowerfactorandsinusoidalinput/outputwaveforms[CV/FifthEuropeanConferenceonPower ElectronicsandApplications.Brighton,UK:IEEEPress,1993,7: 170—175.【3】ALESINAA,VENTURINIMGB.An~ysisanddesignofoptimum—amplitudenine—switchdirectAC—ACconverters[J].IEEETransac? tionsonPowerElectronics.1989,4(1):101一l12.[4]张小平,朱建林.唐华平,等.'种~Buck—Boost矩阵变换器…信息与控制,2008,37(1):40—45.(ZHANGXiaoping,ZHUJianlin,TANGHuaping,eta1.Anovel Buck—Boostmatrixconverter[J].InformationandControl,2008,37(1):40—45)张小平,朱建林,唐华平,等.基于离散滑模控制的新型Buck—Boost矩阵变换器….高技术通讯,2008,18(2):179—183. (ZHANGXiaoping,ZHUJianlin,TANGHuaping,eta1.AnovelBuck-Boostmatrixconverterbasedondiscreteslidingmodecon—trol[J].ChineseHighTechnologyLetters,2008,18(2):179—183.)[6]邓文浪,杨欣荣,朱建林,等.18开关双级矩阵变换器的空间矢量调制策略及其仿真研究『J1.中国电机工程,2005,25(15):84—90.(DENGWenlang,YANGXinrong,ZHUJianlin,eta1.Spacevector modulationstrategyoftwo—stagematrixconverterwith18switches andit'Ssimulationstudy[./].PmceedmgsoftheChineseSociatyforElectricalEngineering,2005,25(15):84—9O.)f7】孟光伟,瞿少成,蔡汉强,等.基于离散变结构控制的DC/DC变换器….控制理论与应用,2003,20(1):63—65. (MENGGuangwei,QuShaocheng,CAIHanqiang,eta1.DesignofDC,DCconverterbasedondiscretevailablestructurecontrolthe-ory[J].ControlTheo~&Applications.2003.20(1):63—65)f81SANCHlSURSUAA,GUBIAE,eta1.Buck.boostDC—ACin—verter:proposalforanewcontrolstrategy[C]//ProceedingsoftheIEEE35|hAnnualPowerElectronicsSpecialistsConference(PESC). Aachen.Germany:IEEEPress.2004,5:3994—3998作者简介:张小平(1966一),男,教授,博士,主要研究方向为电力电子与电力传动.E—mail:**************;朱建林(1942--),男,教授,博士生导师,主要研究方向为电力电子与电力传动,计算机控制等,E—mail:***********.cn;唐华平(1964一),男,教授,博士生导师,主要研究方向为机电系统智能控制,E—mail:********************;张炳根(1969一),男,高级工程师,主要研究方向为机电控制系统,Email:**************;宋芳f197).女,讲师,丰要研究方向为汁尊机应用,E—mail:***************.ca.。
矩阵变换器研究综述1 引言随着电力电子技术的迅速发展,交-交变频器在传动系统中已经得到了广泛的应用,但也存在一些固有的缺陷,因此研究新型的既有优良控制性能和输入电流品质而又成本低、结构紧凑、性能可靠的交-交变频器已成为当前的发展趋势。
矩阵式变换器是一种直接交-交变频器,与传统的自然换流变频器相比,具有以下优点:l 无中间直流环节,结构紧凑,体积小,效率高,便于实现模块化;l 无需较大的滤波电容,动态响应快;l 能够实现能量双向流动, 便于电动机实现四象限运行;l 控制自由度大,输出电压幅值和频率范围连续可调;l 输入功率因数可控,带任何负载时都能使功率因数为1.0;l 输出电压和输入电流的低次谐波含量较小;l 实现功率集成后能够改善变换器内部的电磁兼容性,其输出的pwm电压和输入功率因数可调的特点能够改善电动机、变换器与电源之间的电磁兼容性[1]。
矩阵变换器的原理在80年代被提出,由于具有性能优良的潜在优势,越来越引起人们的重视,有逐步取代交-直-交变频器、周波变流器的趋势[2]。
特别是它具有本身不产生谐波污染的同时,能够对电网进行无功补偿的能力,其总体性能高于其它变换器。
在日益关注可持续发展问题,大力推行电力环保、绿色电源的今天,研究与开发矩阵式变换器特别具有现实意义。
矩阵变换器的关键技术主要包括:主回路的拓扑结构和工作原理、安全换流技术、调制策略和保护电路设计等,下面就这些关键技术的研究进行一一介绍。
2 主回路拓扑结构和工作原理矩阵变换器的名称来源于它的矩阵状拓扑结构。
一个m相输入、n相输出的矩阵变换器,由m×n个双向开关组成,它们排列成矩阵形状,分单级和双级两种。
图1 单级矩阵变换器拓朴结构2.1 单级矩阵变换器常规的矩阵变换器是一种单级交-交变换器(见图1),其结构简单,可控性强,但存在以下缺陷:l 最大电压增益为0.866,并且与控制算法无关;l 主电路的9个双向开关存在控制和保护问题,应采用安全换流技术;l 必须采用复杂的pwm控制和保护策略,同时要求复杂的箝位保护电路。
单级矩阵变换器的理论和控制技术得到了飞速的发展,但仍然停留在实验阶段,而不能在工业中推广应用,原因在于:l 其控制策略复杂,计算量大;l 四步换流法增加了控制的难度, 降低了系统的可靠性;l 开关数量多,系统成本过高[3,4]。
2.2 双级矩阵变换器双级矩阵变换器的结构同传统的交-直-交变换器相似(见图2), 包含交-直(整流)和直-交(逆变)两级变换电路。
图2 双级矩阵变换器所不同的是:l 双级矩阵变换器的两级变换协调同步,直流侧不需要滤波元件;l 整流电路采用由两个单向开关(如igbt)组成的双向开关,是一个三相输入两相输出的3/2相变换;l 在其输出的直流电压极性保持为正的情况下,逆变电路为一个标准的电压源逆变器,可采用单向开关。
双级矩阵变换器克服了传统矩阵变换器的缺点,此外还具有以下优点:l 控制容易,电网侧的单桥可实现零电流开关,负载侧开关控制类似于传统的dc/ac逆变器; l 不同负载,开关数目可以减少;l 箝位电路大大简化。
双级矩阵变换器一般由18个单向开关组成,在一些只需要能量单向传输的场合,可采用15个单向开关、12个单向开关或者9个单向开关的拓扑电路结构,从而降低了系统成本[5]。
2.3 双向开关及开关频率矩阵变换器所用双向开关有多种形式,如开关内嵌式、开关反并联式等。
常用的有两个igb t和两个二极管反并联组成共发射极电路(ce开关模式)和共集电极电路(cc开关模式)。
最终使矩阵变换器能够成为产品的是由标准双向开关单元构成的集成功率模块。
主电路的双向开关的频率并不是越高越好,在谐波注入法中,开关频率为2khz时,变换器的性能和电机直接与电网相连时最为相似。
在实际应用中,受开关器件、控制器和外围电路处理速度的限制,调制频率不可能无限制地加高,根据具体调制方法和电路特点优选开关频率是至关重要的[6]。
3 安全换流技术换流是指将负载电流从一个双向开关管换到另一个双向开关管。
在调制过程中,矩阵式变换器开关管通断状态不断改变,换流始终存在,因此安全换流是矩阵式变换器控制策略中一项至关重要的问题。
为实现双向开关之间安全切换或抑制换流不安全所带来的危害,除了在输出侧增加整流式阻容箝位电路限制过压、在输入端增加一组共铁心的线圈对磁通进行调整外,还需要探索新的安全换流方法。
换流方法主要有死区换流、交叠换流、辅助谐振换流、两步换流和四步换流等[7-8]。
3.1 死区换流死区换流,即插入死区延时法。
它要求输入侧开关触发之前,输出侧开关关断。
这种方法控制简单,但不能工作在电流连续的情况下,且开关损耗大,电压利用率较低,另外缓冲网络比较复杂,故很少使用。
3.2 交叠换流交叠换流要求输出侧开关关断之前,输入侧开关触发。
这种方法必然带来输入相间瞬时短路,需要额外的输入电感限流。
由于电感体积大,价格昂贵,故很少使用。
3.3 辅助谐振换流策略(1) 台湾学者潘晴财教授提出的基于电流滞环调制的谐振式软开关换流策略,仅限于电流滞环调制的矩阵式变换器。
(2) ching-tai pan提出一种低损耗的双向可控开关,能够实现开关的零电流开通,零电压关断,可以实现近于零损耗的换流。
如果采用滞环电流pwm调制方法,可无附加缓冲电路。
但是当负载电流大、开关关断速度快、电感量较大以及二极管快速性不够时,电感将产生瞬时高电压降,此时应采用箝位电路。
(3) cho, jung g与steffen bernet提出了辅助谐振换流方案。
利用杂散电感作为换流电感,输出电容作为换流电容。
在辅助谐振下,主开关只有容性换流,通过增加换流电容可以做到关断瞬间零电压,实现零电压切换。
辅助开关只有感性换流,通过增加换流电感可以做到零电流开通,能够完成零电流切换。
这种换流策略能够安全、高效地高频切换,但功率开关与谐振电感会流过较大的电流,而且零电压、零电流的检测困难。
(4) steffen bernet又提出一种基于辅助谐振换流的矩阵式整流器,可以用于工业直流传动。
以上换流策略均不安全或不实用,安全的换流策略一般需要事先了解某些电量信息,如输入电压和/或输出电流。
常用的有两步换流和四步换流等。
3.4 两步换流策略(1) svensson. t提出两步换流策略,在应该导通的开关单元中,只触发正确的单向开关,而另一单向开关则关闭。
在输入相间换流时,根据实际负载电流方向,在欲导通的开关单元中只触发应该导通的单向开关,而另一单向开关保持关闭,然后关闭上一导通的开关单元中导通的单向开关。
两步换流方法要求准确地检测负载电流方向,在实际中不可避免地存在误差;当电流变号时,两个开关之间不能进行换流。
对于大功率变换器,电流阈值过大,将影响输出电流波形。
(2) l. empringham提出了改进型两步换流方案。
通过检测正在导通的开关单元中每个单向开关的管压降,可以确定电流方向,而且将该信息作为其他开关单元门极驱动的一个条件。
为避免负载电流变向时换流引起的短通状态,可采取如下解决办法:当电流过零时,增加换流死时,其间不再触发任何开关。
由于延时很短,负载电流失真程度不大。
3.5 四步换流策略目前比较普遍采用的是n. burany提出的四步换流策略。
四步换流策略属于半软开关换流策略,被认为是最有前途的方法。
每次换流可以实现一次零电流零电压关断和一次零电流开通,但由于换流时间过长,且每次换流依赖于负载电流的方向,换流过程中不许有负载电流方向的改变,不免有一些局限性,如负载很轻或负载刚启动时,待机状态以及启动瞬间,负载过零点时电流方向很难准确判定,这些可能会造成换流停滞。
为此, 有学者提出用pld/cpld技术的解决换流问题, 用可编程逻辑器件实现四步换流, 在输出频率为10hz~60hz的范围内,以交流电机作负载进行了相关实验。
该换流策略简化了控制系统,提高了控制系统的可靠性[9-10]。
4 调制策略矩阵变换器有多种控制方法。
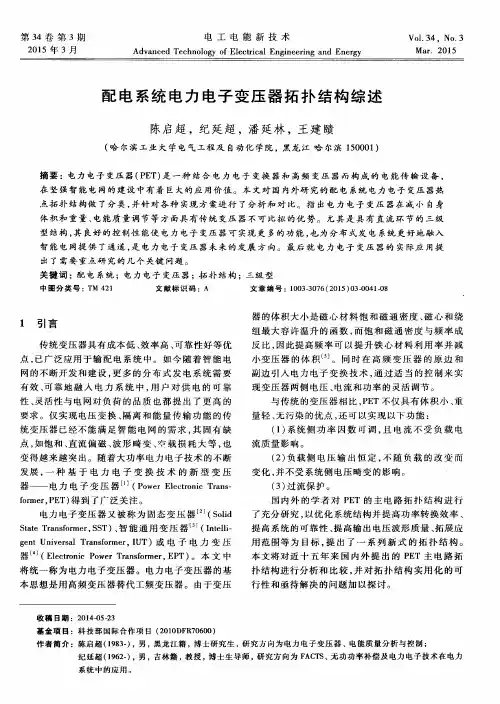
根据控制目标不同,可分为电流控制法和电压控制法两大类。
4.1电压控制法电压控制法以矩阵变换器输出电压(通常要求为正弦量,但也可为其他波)为控制目标。
根据变换器合成输出电压时有无中间环节又可分为间接控制法和直接控制法。
(1) 间接控制法是基于空间矢量变换的一种方法, 主要指空间矢量调制法(svm),它将变换器虚拟为一个整流器和一个逆变器经中间直流环节串联,然后对输入整流器和输出逆变器分别进行电压空间矢量和电流空间矢量调制(svpwm),再消去中间直流环节,就可以得到整个变换器的空间矢量调制。
这一控制方法的物理意义明确,简单易懂,目前已有专用的svpwm 集成芯片商品化产品。
更重要的是,对于采用矢量控制的电机调速应用场合,可将电机调速系统的矢量控制和变换器的矢量控制合为一体[11]。
(2) 矢量调制法也可直接实现。
直接控制法的基本思想是:不同开关连接状态对应着不同的空间矢量。
当进行空间矢量合成时,选取适当的矢量后,可以直接按一个统一的公式计算出各个矢量的开关组合占空比。
两者的结果完全相同,但直接实现更适合于计算机控制。
直接控制法可以分为坐标变换法、谐波注入法、等效电导法及标量法,所有这些方法虽各有一定的优越性,但也存在一定问题,因此,限制了它们的应用范围和深度[12]。
矢量调制法的缺点是抗干扰性差,实际应用中由于电网输入的不对称给变换器的输出电压的输入电流带来难以滤除的低次谐波。
通常的解决方法有负序分量注入法和变系数法。
但这需增加额外计算量和软件的复杂度,且电压传输比有所降低,这样便可采用目前流行的高频整流和高频pwm波形合成技术,变换器的性能可得到较大的改善。
4.2 电流控制法电流控制法以输出电压为控制目标。
一般要求电流为对称正弦量,因此变换器输出电流要跟踪给定电流呈正弦变化。
它有两种基本实现方法:滞环电流控制法和预测电流控制法[13]。
(1) 滞环电流跟踪法是将三相输出电流信号与实测的输出电流信号相比较,根据比较结果和当前的开关电源状态决定开关动作,它具有容易理解、实现简单、响应快、鲁棒性好等优点,但开关频率不够稳定,谐波随机分布,且输入电流波形不够理想,存在较大的谐波等。
(2) 预测电流控制法的基本思想是:利用变换器下一开关周期的期望电流值和当前的实际电流值可以计算出符合电流变化的变换器输出电压矢量,然后在变换器的虚拟逆变器中运用空间矢量法合成这一输出电压矢量,就可以达到跟踪输出电流的目的,但复杂性和计算量将有所增加。
电流控制法具有开关函数求解简便,控制简单,对控制器硬件要求较低,输出电流波形谐波分量小,抗干扰性能好、动态响应快、能限流、鲁棒性好等优点;但开关频率不够稳定,输出电压谐波分量大,输入滤波器难以设计,且输入电流波形不够理想,存在较大的谐波等;主要应用于高性能电机驱动场合。