一种基于高斯混合模型的轨迹预测算法
- 格式:pdf
- 大小:1.02 MB
- 文档页数:16
基于高斯分析的马尔可夫位置预测方法乔岩磊;杜永萍;赵东玥【摘要】针对基于马尔可夫模型在真实时间上进行位置预测时,需要通过对时间进行等值划分来确定位置转移时间点,从而导致预测结果粗糙的问题,提出一种基于高斯分析的马尔可夫位置预测方法.该方法首先利用高斯混合模型拟合连续时间下地点之间的转移概率,从而发现可能的位置转移时间点,并将这些时间点作为马尔可夫模型的状态转移点,建立马尔可夫模型;然后通过用户在这些时间点的转移概率流向,计算用户位于某一位置的概率值,从而得到最终的位置预测结果.在数据集GeoLife 上的实验结果表明,该方法相对于传统马尔可夫模型和高斯混合模型的预测准确率分别提升了约10%和12%.%To solve the problem that the prediction results based on Markov model are rough due to the equivalent partition of time for deter-mining of transition time point,we propose a new location prediction method of Markov based on Gaussian analysis. First,it finds out the possible transition time points by using Gaussian mixed model fitting the transition probability of locations with continuous time,and establi-shes the Markov model by making these points to be the state transition points of the traditional Markov model. Finally it predicts the user' s location by calculating the probability of transition between states. The experiment on GeoLife dataset shows that the precision can be im-proved respectively by about 10% and 12% compared with Markov model and Gaussian mixture model.【期刊名称】《计算机技术与发展》【年(卷),期】2018(028)001【总页数】5页(P41-44,50)【关键词】位置预测;基于位置的服务;轨迹数据;时间序列【作者】乔岩磊;杜永萍;赵东玥【作者单位】北京工业大学计算机学院,北京 100124;北京工业大学计算机学院,北京 100124;北京工业大学计算机学院,北京 100124【正文语种】中文【中图分类】TP3110 引言随着当今互联网移动化的潮流推进,类似导航、交通管理等基于位置的服务发展迅速。
高斯混合模型算法在GMM中,假设数据的潜在分布是由多个高斯分布组成的,每个高斯分布代表了一个聚类或者类别。
GMM通过将这些高斯分布的混合系数、均值和协方差矩阵进行估计来拟合数据分布。
GMM的数学表达如下:P(x) = ∑(i=1 to k) Πi * N(x, μi, Σi)其中,P(x)表示数据分布的概率,Πi表示第i个高斯分布的混合系数,N(x,μi,Σi)表示第i个高斯分布的概率密度函数,μi和Σi分别表示第i个高斯分布的均值和协方差矩阵。
GMM算法的步骤如下:1.初始化:选择合适的聚类数k,随机初始化各个高斯分布的混合系数Πi、均值μi和协方差矩阵Σi。
2. E步(Expectation Step):计算每个数据点属于每个聚类的概率。
使用当前的参数估计值计算每个数据点x属于每个聚类i的后验概率γi:γi = Πi * N(x, μi, Σi) / (∑(j=1 to k) Πj * N(x, μj, Σj))3. M步(Maximization Step):根据E步计算得到的后验概率更新模型参数。
计算每个高斯分布的新混合系数、均值和协方差矩阵:Πi = (∑(n=1 to N) γi) / Nμi = (∑(n=1 to N) γi * x) / (∑(n=1 to N) γi)Σi = (∑(n=1 to N) γi * (x - μi)^T * (x - μi)) / (∑(n=1 to N) γi)其中,N表示数据点的数量。
4.对数似然比较:计算新参数的对数似然值。
若对数似然值相对于上一次迭代的值的提升不大,则停止迭代;否则返回第2步。
GMM算法的优点在于:-GMM可以用于对任意分布的数据进行建模,因为它通过多个高斯分布的组合来表示分布的形状。
-GMM可以获得每个数据点属于每个聚类的概率,而不仅仅是一个硬性分类结果。
-GMM对异常值和噪声具有一定的鲁棒性。
然而,GMM也有一些缺点:-GMM的参数估计是通过迭代求解的,因此对初始参数的选择十分敏感。
差分gmm模型原理1.引言1.1 概述差分GMM模型是一种用于建模高维数据的统计模型,它是基于GMM(高斯混合模型)的变种。
差分GMM模型在机器学习和模式识别领域有着广泛的应用,能够准确地对复杂数据进行建模和分类。
差分GMM模型的主要思想是通过将原始数据集投影到一个低维子空间中,将高维的数据转化为一系列低维的特征向量。
这些特征向量通常被称为“差分特征”,因为它们捕捉到了数据中的相对差异信息。
与传统的GMM模型不同,差分GMM模型引入了一个额外的步骤,即数据的差分运算。
差分运算可以通过对相邻的数据点进行减法操作得到,从而得到一系列差分特征向量。
这些差分特征向量具有更强的鲁棒性和可解释性,能够捕捉到数据的微小变化和趋势。
在差分GMM模型中,GMM的参数是通过最大似然估计来求解的。
通过最大化数据在模型中的似然概率,可以得到最优的模型参数。
而差分GMM模型中的差分特征向量则通过计算原始数据点与其邻居之间的差值得到。
差分GMM模型的优势在于它能够对数据中的动态变化进行建模,而不仅仅是静态的分布。
这使得差分GMM模型在时间序列分析、运动轨迹识别等领域有着广泛的应用前景。
此外,差分GMM模型还能够减少数据的维度,并提取出关键的特征信息,从而提高了模型的鲁棒性和分类性能。
综上所述,差分GMM模型是一种能够对高维数据进行建模和分类的统计模型。
通过引入差分特征和GMM的组合,它能够更好地捕捉到数据的动态变化和趋势。
差分GMM模型在多个领域具有广泛的应用前景,为解决实际问题提供了一种有效的工具和方法。
1.2文章结构文章结构部分的内容可以包括以下内容:在本文中,将按照以下结构来展开讨论差分gmm模型的原理和应用。
具体内容分为引言、正文和结论三个部分。
引言部分将以概述、文章结构和目的三个小节来介绍本文的背景和目标。
首先,我们将简要介绍差分gmm模型的概念和基本原理,为读者提供一个总体了解。
接着,我们将详细介绍本文的结构和各个部分的内容安排,方便读者对本文内容的整体把握。
高斯混合模型 c语言算法高斯混合模型 C 语言算法一、引言高斯混合模型(Gaussian Mixture Model,简称 GMM)是一种用于概率建模和数据聚类的统计模型。
它是由多个高斯分布组成的混合模型,每个高斯分布对应一个聚类簇。
C 语言是一种广泛应用于嵌入式系统和底层开发的编程语言。
本文将介绍如何使用 C 语言实现高斯混合模型算法。
二、高斯混合模型算法原理1. 高斯分布高斯分布是一种连续概率分布,也称为正态分布。
它的概率密度函数可以通过以下公式计算:```f(x) = (1 / (σ * √(2π))) * e^(-((x - μ)^2) / (2 * σ^2)) ```其中,μ 是分布的均值,σ 是分布的标准差。
2. 高斯混合模型高斯混合模型是由多个高斯分布组成的混合模型。
每个高斯分布都对应一个聚类簇,用来表示数据的不同类别或聚集程度。
高斯混合模型的概率密度函数可以表示为:```f(x) = Σ(w_i * f_i(x))```其中,w_i 是第 i 个高斯分布的权重,f_i(x) 是第 i 个高斯分布的概率密度函数。
3. 高斯混合模型的参数估计高斯混合模型的参数估计是通过最大似然估计方法来实现的。
具体步骤如下:- 初始化每个高斯分布的均值、标准差和权重;- 重复以下步骤直到收敛:- E 步:根据当前参数估计每个样本属于每个聚类的概率;- M 步:根据当前样本的权重更新每个聚类的参数估计;- 根据最终的参数估计得到高斯混合模型。
三、C 语言实现高斯混合模型算法1. 数据结构定义我们需要定义一些数据结构来表示高斯混合模型的参数和样本数据。
例如,可以定义一个结构体来表示每个高斯分布的参数:```ctypedef struct {double mean; // 均值double variance; // 方差double weight; // 权重} Gaussian;```2. 初始化参数在开始参数估计之前,我们需要初始化每个高斯分布的参数。
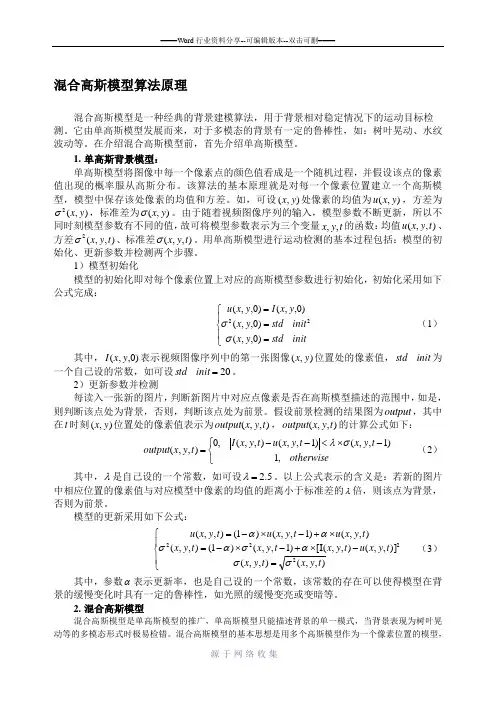
混合高斯模型算法原理混合高斯模型是一种经典的背景建模算法,用于背景相对稳定情况下的运动目标检测。
它由单高斯模型发展而来,对于多模态的背景有一定的鲁棒性,如:树叶晃动、水纹波动等。
在介绍混合高斯模型前,首先介绍单高斯模型。
1. 单高斯背景模型:单高斯模型将图像中每一个像素点的颜色值看成是一个随机过程,并假设该点的像素值出现的概率服从高斯分布。
该算法的基本原理就是对每一个像素位置建立一个高斯模型,模型中保存该处像素的均值和方差。
如,可设),(y x 处像素的均值为),(y x u ,方差为),(2y x σ,标准差为),(y x σ。
由于随着视频图像序列的输入,模型参数不断更新,所以不同时刻模型参数有不同的值,故可将模型参数表示为三个变量t y x ,,的函数:均值),,(t y x u 、方差),,(2t y x σ、标准差),,(t y x σ。
用单高斯模型进行运动检测的基本过程包括:模型的初始化、更新参数并检测两个步骤。
1)模型初始化模型的初始化即对每个像素位置上对应的高斯模型参数进行初始化,初始化采用如下公式完成:⎪⎩⎪⎨⎧===init std y x init std y x y x I y x u _)0,,(_)0,,()0,,()0,,(22σσ (1)其中,)0,,(y x I 表示视频图像序列中的第一张图像),(y x 位置处的像素值,init std _为一个自己设的常数,如可设20_=init std 。
2)更新参数并检测每读入一张新的图片,判断新图片中对应点像素是否在高斯模型描述的范围中,如是,则判断该点处为背景,否则,判断该点处为前景。
假设前景检测的结果图为output ,其中在t 时刻),(y x 位置处的像素值表示为),,(t y x output ,),,(t y x output 的计算公式如下:⎩⎨⎧-⨯<--=otherwise t y x t y x u t y x I t y x output ,1)1,,()1,,(),,(,0),,(σλ (2)其中,λ是自己设的一个常数,如可设5.2=λ。
基于高斯过程回归模型的时间序列预测研究近年来,随着信息技术的不断发展,时间序列预测在各个领域中应用越来越广泛。
尤其是在金融、气象、交通等领域,时间序列预测为我们提供了重要的决策支持。
而基于高斯过程回归模型的时间序列预测方法,由于具有高度的灵活性和可解释性,也得到了越来越多研究者的关注。
一、高斯过程回归模型高斯过程回归模型(Gaussian Process Regression,GPR)是一种基于贝叶斯非参数模型的回归方法,它可以利用已知的数据来对未知数据进行预测。
在高斯过程回归模型中,假设数据服从高斯分布,因此可以通过均值函数和协方差函数对其进行建模。
对于输入向量$x_i=(x_{i1},x_{i2},...,x_{id})$,输出$y_i$的观测数据,可以将观测数据表示为:$$y_i=f(x_i)+\epsilon_i$$其中$f$是未知函数且服从高斯过程,$\epsilon_i$服从独立同分布的高斯分布$N(0,\sigma_n^2)$,表示误差项。
这样,$f$就可以表示为:$$f(x)\sim GP(m(x),k(x,x^{\prime}))$$其中$m(x)$是函数$f$的均值,$k(x,x^{\prime})$是它们的协方差函数,可以根据不同的场景灵活选取。
二、高斯过程回归模型的时间序列预测在时间序列预测问题中,通过利用历史数据对未来的趋势进行预测。
通常情况下,时间序列预测模型都是基于滑动窗口的方法,即利用历史数据作为训练集,预测下一个时刻的值。
因此,我们可以将时间序列中的每个点看成输入$x_i$和输出$y_i$的组合。
在高斯过程回归模型中,我们可以通过观测数据的权重来实现对历史数据的建模,并通过协方差函数来捕捉历史数据之间的关系。
例如,可以选取协方差函数为常见的RBF核函数:$$k(x,x^{\prime})=\theta_1\mathrm{exp}(-\frac{(x-x^{\prime})^2}{2\theta_2^2})+\theta_3\delta(x,x^{\prime})$$其中,$\theta_1$、$\theta_2$、$\theta_3$为模型参数,$\delta(x,x^{\prime})$为Dirac delta函数。
一种基于改进的GMM 算法的数据丢失预测模型王晖1,姜春茂2(1.哈尔滨师范大学计算机科学与信息工程学院,黑龙江哈尔滨150025;2.福建工程学院计算机科学与数学学院,福建福州350118)摘要:随着云平台上运行任务的数量急剧增加,任务失败的概率也随之增加,数据的丢失是任务失败的主要原因。
如果在任务运行前判断出是否可能发生丢失以及其丢失类型,那么就可以提前采取措施避免或减少损失。
该模型基于谷歌在2019年发布的最新云集群数据,对任务的数据丢失问题进行了深入的研究,针对不同任务属性探究其与数据丢失的相关性,并选用了GMM (Gaussian Mixed Model )算法并将其改进来建立数据丢失预测模型。
经过多种聚类算法的实验比较,改进后的GMM 模型表现出极好的适应性和准确性,能够精准且迅速地在任务运行前判断其发生数据丢失的可能性以及判断其丢失类型。
最后根据预测出的不同数据丢失类型,给出了一定的建议。
关键词:谷歌云集群;任务失败;数据丢失预测;Gaussian Mixed Model 中图分类号:TP301.6文献标识码:A 文章编号:2096-9759(2023)03-0028-07A loss prediction model based on an improved GMM algorithmWANG Hui 1,JIANG Chunmao 2(1.College of Computer Science and Information Engineering,Harbin Normal University,Harbin Heilongjiang 150025,China;2.College of Computer Science and Mathematics,Fujian University of Technology,Fuzhou Fujian,350118,China )Abstract:As the number of tasks running on the cloud platform increases dramatically,the probability of task failure also increases.The loss of data is the main reason for task failure.If the possibility of loss and its type is determined before the task is run,then measures can be taken in advance to avoid or reduce the loss.Based on the latest cloud cluster data released by Google in 2019,this model conducts in-depth research on the problem of task data loss,and explores its correlation with data loss for different task attributes.And the GMM (Gaussian Mixed Model )algorithm was selected and improved to establish a data loss prediction model.After the experimental comparison of various clustering algorithms,the improved GMM model shows excellent adaptability and accuracy,and can accurately and quickly judge the possibility of data loss and the type of loss before the task runs.Finally,according to the different types of data loss predicted,some suggestions are given.Key words:Google Cloud Cluster ;Task failed ;Data Loss Prediction ;Gaussian Mixed?Model0引言随着社会的发展,现如今信息数据几乎呈指数增长。
常用轨迹预测算法随着无人驾驶技术的发展,轨迹预测算法在自动驾驶系统中起着重要的作用。
轨迹预测算法用于预测其他车辆、行人或物体的运动轨迹,从而帮助自动驾驶系统做出合理的决策和规划。
本文将介绍几种常用的轨迹预测算法,并对其原理和应用进行详细分析。
一、基于运动模型的轨迹预测算法基于运动模型的轨迹预测算法假设其他车辆、行人或物体的运动遵循特定的数学模型。
根据这些模型,可以通过已有的历史轨迹数据来预测未来的运动轨迹。
常用的基于运动模型的轨迹预测算法有线性模型和非线性模型。
1. 线性模型线性模型是最简单的运动模型之一。
它假设其他车辆、行人或物体的运动是匀速直线运动,并且运动的速度和方向保持不变。
基于线性模型的轨迹预测算法通过拟合历史轨迹数据中的线段来预测未来的运动轨迹。
然而,线性模型无法捕捉到复杂的运动模式,因此在实际应用中效果有限。
2. 非线性模型非线性模型考虑到了其他车辆、行人或物体的运动可能是非线性的。
常用的非线性模型有卡尔曼滤波器和粒子滤波器。
卡尔曼滤波器基于贝叶斯滤波理论,通过融合传感器测量值和运动模型的预测值,实现对轨迹的预测。
粒子滤波器则通过随机采样的方式,生成一组粒子来表示可能的轨迹,并根据测量值对粒子进行权重更新和重采样,从而得到最终的轨迹预测结果。
二、基于机器学习的轨迹预测算法基于机器学习的轨迹预测算法利用已有的轨迹数据训练模型,并通过模型来预测未来的运动轨迹。
常用的基于机器学习的轨迹预测算法有决策树、支持向量机和神经网络。
1. 决策树决策树是一种基于树状结构的分类模型,可以用于轨迹预测。
通过分析历史轨迹数据中的特征,决策树可以学习到运动模式,并基于学到的模式来预测未来的轨迹。
然而,决策树容易过拟合,对噪声和异常数据敏感。
2. 支持向量机支持向量机是一种二分类模型,可以通过核函数将其扩展到多分类问题。
支持向量机可以用于轨迹预测,通过学习历史轨迹数据中的特征和标签,预测未来的运动轨迹。
支持向量机能够处理高维数据和非线性关系,具有较好的泛化能力。
2021年6月Chinese Journal of Intelligent Science and Technology June 2021 第3卷第2期智能科学与技术学报V ol.3No.2移动目标轨迹预测方法研究综述刘文1,2,胡琨林1,李岩1,刘钊1,2(1. 武汉理工大学航运学院,湖北武汉 430063;2. 国家水运安全工程技术研究中心,湖北武汉 430063)摘 要:随着智能交通系统领域大量移动终端设备的涌现,理解并准确预测移动目标轨迹有助于降低交通事故发生的概率,提高基于位置服务的智能交通应用的质量和水平。
主要从数据驱动和行为驱动的角度对移动目标轨迹预测方法进行综述,首先对概率统计、神经网络、深度学习和混合建模等数据驱动方法进行比较;其次对动力学建模和目标意图识别等行为驱动方法的基本概念及研究现状进行概述;然后分别对目标轨迹重建、目标异常行为识别和导航路径规划等轨迹预测应用进行简要叙述;最后讨论了移动目标轨迹预测存在的主要问题以及未来的发展方向。
关键词:智能交通系统;轨迹预测;人工智能;深度学习;动力学模型中图分类号:TP391文献标识码:Adoi: 10.11959/j.issn.2096−6652.202115A review of prediction methods for moving target trajectoriesLIU Wen1,2, HU Kunlin1, LI Yan1, LIU Zhao1,21. School of Navigation, Wuhan University of Technology, Wuhan 430063, China2. National Engineering Research Center for Water Transportation Safety, Wuhan 430063, ChinaAbstract: With the rapid emergence of mobile terminal equipment in intelligent transportation system, the deep under-standing and accurate prediction of moving target trajectories are capable of reducing the traffic accident probability, and promoting the location service-based intelligent transportation applications. The trajectory prediction methods prediction methods for moving target trajectories were reviewed from the data-driven prediction methods and the behavior-driven trajectories prediction methods. Firstly, the data-driven prediction methods were reviewed, including probabilistic statis-tics, neural networks, deep learning, and hybrid modeling. Then, the basic conceptions of target behavior-driven trajecto-ries prediction methods were analyzed. The corresponding dynamical modeling and intention recognition methods were reviewed. The trajectory prediction applications were briefly analyzed and reviewed, such as target trajectory reconstruc-tion, target abnormal behavior identification, and navigation route planning. Finally, the main problems and development directions related to prediction of moving target trajectories were discussed.Key words: intelligent transportation system, trajectory prediction, artificial intelligence, deep learning, dynamic model1引言移动目标轨迹预测是一个典型的涉及交通运输工程和智能科学与技术的多学科交叉研究问题,在智能交通监管、异常行为检测和无人航行器自主导航等领域具有重要的理论研究和实际应用价值[1]。
高斯混合模型em算法高斯混合模型(Gaussian Mixture Model,简称GMM)是一种概率模型,它能够将多个高斯分布组合在一起,从而更好地对数据进行建模和描述。
EM算法(Expectation-Maximization Algorithm,期望最大化算法)是一种常用于GMM参数估计的迭代算法。
本文将重点介绍GMM和EM算法,并对EM算法的具体步骤进行详细解释。
1. 高斯混合模型(Gaussian Mixture Model)高斯混合模型通过同时拟合多个高斯分布的线性组合来对数据进行建模。
设X为观测数据,其概率密度函数可以表示为:P(X) = Σk=1 to K (πk * N(x|μk, Σk))其中,N(x|μk, Σk)表示高斯分布的概率密度函数,πk为每个分布的权重,并满足Σk=1 to K πk = 1。
通过最大化似然函数,可以估计出每个高斯分布的参数μk和Σk。
2. EM算法(Expectation-Maximization Algorithm)EM算法是一种迭代算法,用于求解含有隐变量的概率模型参数估计问题。
EM算法通过交替进行E步和M步来迭代地逼近模型参数的最大似然估计。
- E步(Expectation Step):在E步中,通过当前的模型参数估计隐变量的期望。
对于GMM,E步的目标是计算每个样本属于每个高斯分布的后验概率。
- M步(Maximization Step):在M步中,根据E步计算得到的隐变量的期望,更新模型参数。
对于GMM,M步的目标是最大化对数似然函数,从而估计出每个高斯分布的参数μk和Σk。
具体的EM算法步骤如下:(1) 初始化参数,包括高斯分布的个数K、每个高斯分布的权重πk、每个高斯分布的均值μk和协方差矩阵Σk。
(2) 进行E步,计算每个样本属于每个高斯分布的后验概率。
根据当前的参数估计后验概率如下:γij = πj * N(xi|μj, Σj) / Σk=1 to K (πk * N(xi|μk, Σk))(3) 进行M步,更新模型参数。
基于GM(1,1)预测算法的民航飞机实时轨迹可视算法钱睿;乐俊;刘丹【摘要】针对民航飞机动态飞行可视化中滞后和跳跃问题,研究并提出了一种基于预测的民航飞机实时轨迹可视化算法.算法包括轨迹点预测,目标点行进和误差修正三部分.轨迹点预测基于GM(1,1)算法进行改进,在每次迭代时依据所有先验点和搜索方向动态调整发展系数.目标点行进基于预测坐标点提出TSUS(Time Slice Uniform Speed)算法,TSUS算法保证了在既定时间内目标确实移动到目的地,且能够根据初始速度方向调整轨迹弧度.误差修正采用分段式误差修正策略,以平衡不同情况下精确性和实用性.实验表明,提出的算法模型可用于民航飞机可视轨迹渲染中,且能获得良好的效果,提高系统的可用性和用户体验.%Aiming at the lagging and jumping problems in dynamic flight visualization of civil aircrafts, a real-time trajectory visualization algorithm for civil aircrafts based on prediction is studied and put forward. The algorithm includes three parts: track point prediction, target traveling and error correction. The track point prediction is improved based on GM(1, 1) algorithm. In each iteration, the development coefficients is dynamically adjusted according to all priori points and the search direction. The target traveling is based on the TSUS (Time Slice Uniform Speed) algorithm, which ensures that the target does indeed move to the destination within a period of time and adjusts the trajectory according to the initial direction. The error correction adopts the segmented error correction strategy to balance the accuracy and practicality of different situations. Experiments show that the algorithm canbe effectively applied to visual trajectory rendering of civil aircrafts and improve the usability and user experience of the system.【期刊名称】《计算机系统应用》【年(卷),期】2017(026)011【总页数】6页(P187-192)【关键词】可视化;GPS;运动预测;航空定位;轨迹追踪【作者】钱睿;乐俊;刘丹【作者单位】电子科技大学电子科学技术研究院,成都 611731;西南电子信息技术研究所,成都 610041;电子科技大学电子科学技术研究院,成都 611731【正文语种】中文航空运输业的发展使现代人的生活更加便利,而民航飞机作为航空运输的载体,在其中扮演者重要的角色.民航飞机传递位置信息,使相关人员了解飞机位置是保证航空安全的重要手段.为了更直观的表达位置信息,可视化界面应需而生.民航飞机传输定位信号主要依靠ADS-B(Automatic Dependent Surveillance-Broadcast,广播式自动相关监视)报文,其中包括了经度、纬度、高度、速度、航向、识别号等信息[1].通过自动周期性发送ADSB报文,监测站即可获取飞机相关信息.ADS-B报文中的飞机位置信息和运动信息是通过解析GPS、北斗等定位系统获取的[2].定位可视化技术应用在许多领域,由于web端先天的兼容性,使得其也成为定位数据可视化的重要载体[3].目前常见的方式有两种.第一种方式是通过接收到的目标位置信息,将目标在可视界面上对应点的位置进行更新,以达到显示目标位置的目的.此种方式能够准确反映目标位置信息,但存在两点不足.第一,目标轨迹不连续,观察者无法感受到目标移动过程,在下一定位信号获取之前,用户无法获知目标情况.第二,定位信号存在滞后性,在收到信号后才进行位置更新,如果目标持续移动,则可视界面中的位置会滞后于实际位置.目前,此种方式常用于现有的民航飞机定位可视化设备上.第二种方式是在第一种方式上的改进,它在收到位置信息后,将可视化界面的目标点移动到新的位置,提高了一定的用户体验,用户能够看到目标点的移动.但仍然没有解决根本问题,并且出现了不符合现实情况的轨迹,例如跨越了障碍,轨迹不平滑等问题[4].此种方式目前多用于地面移动目标定位的可视化系统中[5].目前,飞行相关数据可视化的研究大都是飞机本身的姿态方面[6].本文针对民航飞机轨迹可视化的需求,基于移动预测的方式,研究在二维场景下利用周期ADS-B报文进行飞机行进动画的渲染算法,提出了基于预测的民航飞机实时轨迹可视算法,使得可视化界面中飞机目标点移动更加精确和平滑,用户体验得到了提升.为实现民航飞机轨迹可视化,需要周期性获取飞机ADS-B报文.ADS-B报文中包括经度、纬度、高度、时间、南北方向速度,东西方向速度,垂直速度等信息.本文仅讨论二维空间中的可视化问题,且获取信号周期T固定,所以仅需要经度、纬度、东西方向速度、南北方向速度4个参数.三维空间的可视化问题可类比.飞机轨迹可视化的渲染可分为三个步骤进行,依次是:轨迹点预测、目标点行进和误差处理.1)轨迹点预测主要是用来先行预测下一坐标点,使得在未收到下一坐标点实际信号之前,飞机的可视化点可以先行移动,保证了可视化的连贯性.2)目标点行进则是当预测出下一坐标点时,飞机可视化点向前行进的策略,既要保证在时间间隔内移动到目标点,又要保证轨迹平滑达到良好的可视效果.3)因为预测是无法做到非常精确的,与实际坐标之间必然会存在误差,误差修正就是对此的一种修正,是提高精确度的关键步骤.而关于GPS信号传输和计算中产生的误差修正不在本文的讨论范围内,相关方法请参考文献[7].本文认为获得的GPS定位坐标即是可视化中需要展示的位置信息.本文提出的民航飞机轨迹可视化算法流程如图1.针对可视化需求而研究的飞行轨迹预测算法并不多见.但仍有一些轨迹预测算法被提出,如基于高斯混合模型的轨迹预测算法[8]等;也有采用已有滤波算法应用于空中飞行轨迹预测研究分析[9].这些算法普遍计算复杂度高,性能开销大,无法满足可视化系统的要求.本节针对此问题,基于 GM(1,1)预测算法[8]提出了一种预测模型.预测轨迹点采用基于灰色预测模型加以优化的预测模型.给定数据序列对给定的数据序列进行一次累加,序列为且满足微分方程:根据灰色系统生成理论,可将微分方程转换为其中,运用最小二乘法求出上式解,即可得到GM(1,1)灰色预测模型方程:其中,a为发展系数.根据灰色预测模型,可以求得的拟合值,然后进一步可以利用还原公式求得的拟合值: 即求得了原始序列的拟合值.在求解过程中,发展系数a与精度密切相关,工程中常常根据先验经验取一个固定值,通常情况下取值范围为时可用于中长期预测;时可用于短期预测.但全部预测过程采用统一发展系数,会使得在不同阶段预测准确度不同且偏差较大.本文针对实际场景动态设置a值,以提高预测精准度.b为背景中挖掘出的信息数据,通常是一个定值,由具体场景提供.GM(1,1)模型精度检验通常采用残差,后验差,关联度三种方式,本文将采用相对残差进行检验,并根据每次的检验结果调整发展系数a的取值.灰色模型中当k=1时模型必成立,且时,则模型方程组为超定方程组,采用最小二乘法求解系数a.而a的最佳化问题则转换为残差或残差百分比的最小化问题,即为下的有约束条件的非线性规划问题.约束条件采用航路信息的先验知识进行约束.航路是指由国家统一划定的具有一定宽度的空中通道.民航航班通常在航路内行驶,所以采用航道边缘为边界条件.在航路行进方向上给定边界值,使得最终预测点在边界范围内.由此需要确定搜索方向,在给定搜索方向上的预测值满足取值最优条件即可.记进行第k+1轮迭代时,其中tk是位移步长,与速度和时间有关.为搜索方向,得: 求得的极小值点和在航路边界处的边界值点,即可得到对应的与瞬时速度方向夹角为的方向.剩余的最小的值即为.由此我们得到了搜索方向Pk,带入Pk可以得到方程:解方程可得发展系数a.再由灰色预测模型方程,得到第k个点的一次累加预测值使用还原公式得到第k个点的预测值为保证行进过程及时且平滑,本文提出了TSUS算法,即时间片匀速行进算法.包括分量匀速率和速度匀转动方向两部分.行进是指从当前点运动到下一预测点的过程,其关键在于速度控制.本文速度采用垂向分量匀速,速度方向采用匀角速度向内偏转法,可以确保在时间间隔点目标平滑运动到下一点的位置.记第k点坐标为第k+1点的预测坐标为,记位移向 lk,有:则 pk到的直线距离为位移方向向量为目标在k点的瞬时速度为瞬时速度方向向量求出k点瞬时速度与位移向量的夹角满足:取适当单位时间t0,将定位信号的时钟周期T按t0分段,得到n段时间片,即:同时,将也做n等分,得到每个时间片内的位移距离和角度偏转量行进控制,使目标点按时间片依次行进,在每个时间片内的速度在位移方向上的分量为每个时间片内的速度向量与位移向量的夹角与前一个时间片相比变化为当位移方向角大于k点瞬时速度方向角时取+,否则取-.最终得到,目标在时间片ti内的运动状态方程:由于预测误差在预测模型中不可避免,所以对预测误差的修正策略也直接影响到可视化中信息准确度和平滑度.本文对误差修正的策略建立在可视化的实际应用场景上,即在以可视化界面中能够反映出定位和移动情况即可.依据以上条件,本文提出分段式误差处理策略.设目标点当前位置为收到的GPS信号坐标为第k-1点坐标为则时间周期内的实际位移距离dk为:1)若则认为在可视化中显示位置没有明显变化.此时目标图标不移动,但需要使用实际位置信息进行下一次预测.2)若则认为预测点与实际位置之间存在需要修正的误差.为保证轨迹平滑,将目标点位移到实际位置的过程纳入下一次行进过程的第一段时间片.由于误差较小,所以采用直线行进的方式,对观看者而言平滑度不会受到太大影响.3)若时,则认为误差太大,属于预测失误情况.此类情况一般在行进轨迹波动剧烈时会发生.此时准确性的需求大于动画的视觉平滑性,行进退化为直接跳转方式,即目标点直接跳转至实际位置.对速度方向的误差修正则容易许多,因为瞬时速度方向不会影响视觉平滑性,所以采用直接舍弃原始速度信息,采用GPS信号瞬时速度.根据中国民航局相关规定及《航空承运人例行航空器追踪监控实施指南》中的要求,自2016年12月1日起,我国民航全面实现客机全球追踪监控.所有我国民航客机在每15分钟或更短时间周期内,须通过现有机载设备自动向地面运行控制部门发送飞机所在经度、纬度、高度和位置信息,以确保地面实时掌握飞行中客机的准确位置.根据以上规定,中国航空公司航班均需在一段时间内自动向地面站提交位置及相关信息,这为自动获取数据绘制可视化界面提供了基础.从性能角度考虑,由于空管场景数据量非常大,同时在运行中的航班非常多,如果采样时间较短,将对服务器性能产生较大压力.但国内航班由于航程较短,采用上限的15分钟采集时长又不利于界面绘制.民航统计信息表明平均每天飞行航班架次约为10500架次,峰值时间空中同时约有3000余架飞机.所以本文采用5分钟时间周期,即队列数据处理时间平均 0.1s左右,符合实际应用.同时,结合实际数据样例进行试验.坐标采用某次航班平飞阶段中120分钟内的定位点数据,采集时间间隔为5分钟.航班坐标数据如表1所示.飞机的航向是指从所取基准线北端沿顺时针方向与飞机纵轴在水平面上的投影间的夹角.基准线取地球子午线得到的夹角称为真航向.本文描述飞机飞行速度方向采用真航向.真航向角度可以由经纬度坐标差值求得.即:使用以上数据进行实验验证.在第1点预测时由于没有足够的先验点,故采用直线行进.从第2点开始,预测结果如图2,和图3所示.针对预测结果,计算预测准确度.本文采用后验方差比进行检验.具体步骤和计算方法如下:1)依据前文提到残差和相对残差的计算公式,分别计算残差和相对残差.2)分别计算实际经纬度的均值和方差以及残差的均值和方差SE,有:3)计算后验方差比C:计算结果如表2所示.由实验结果和上述误差计算结果可知,本文提出的预测模型总体上能够较为准确的预测飞机坐标点位置,满足可视化对定位点预测的要求.但若坐标位置变化波动较大则会产生较大的误差.从结果上看,经度变化比较平稳,预测较为精确,而纬度在波动比较大的点明显存在误差,而误差较大的点会采用直接跳转策略消除误差,但会影响视觉平滑度.基于上述预测值,绘制目标点行进轨迹.依据本文提出的行进算法,取定位信号获取时间间隔,单位时间,绘制的移动轨迹如图4所示.由轨迹图看出,本文提出的可视化行进算法基本保证了视觉上的连续性,提升了用户体验.但由于采样间隔较长,导致在前后坐标点波动过大的位置预测失误,为修正较大误差产生了跳转轨迹尖角.但从可视化角度来看,在定位点处的坐标位置仍然较为精确,可以认为界面上的信息显示准确,而轨迹也比直接连接处的折线图更为形象.由此可以得出结论,本文提出的行进算法在可视化轨迹的绘制上具有实用性.本文基于民航飞机的航行特点,结合实际需求和条件,提出了一种基于民航飞机通信中定位数据的轨迹可视化渲染算法.该方法特点在于能够通过已有信息和航路等限定条件预测飞机走向,在传统GM(1,1)模型上依据预定条件提出了发展参数的非线性规划最优性解法.继而在轨迹构建上提出了简单且有效的行进算法.最终通过误差修正保证了正确性.这一算法模型经过实际数据的测试验证,证明了其能良好的作用于民航飞机轨迹的渲染,为提供民航可视化系统打下基础.目前本文提出的模型已经应用于民航飞行实时数据可视化系统的设计中,该系统基于地理效果图[10]展示飞机飞行轨迹及相关信息.系统验证,本文提出模型在飞机位置预测及可视化方面具有较好的效果.【相关文献】1 张鹏,刘意,段照斌.基于 BDS/GPS 的 ADS-B 信号源的研究.测控技术,2015,34(1):12–15,19.2 雷静.GPS/北斗定位解算算法的研究[硕士学位论文].哈尔滨:哈尔滨工程大学,2013.3 肖寒冰,方路平.一种 webGIS 数据可视化方法.计算机系统应用,2010,19(12):81–85.[doi:10.3969/j.issn.1003-3254.2010.12.016]4 石波,卢秀山,陈允芳.应用 EKF 平滑算法提高 GPS/INS 定位定姿精度.测绘科学技术学报,2012,29(5):334–338.5 计宏炜,沈亚强.一种可视化的定位系统设计.微型机与应用,2014,33(14):82–84,87.[doi:10.3969/j.issn.1674-7720.2014.14.026]6 李春香.飞行数据可视化技术研究.中国安全科学学报,2009,19(1):166–171.7 乔少杰,金琨,韩楠,等.一种基于高斯混合模型的轨迹预测算法.软件学报,2015,26(5):1048–1063.[doi:10.13328/ki.jos.004796]8 徐肖豪,杨国庆,刘建国.空管中飞行轨迹预测算法的比较研究.中国民航学院学报,2001,19(6):1–6.9 孔令云,沈鹃.灰色预测模型 (GM(1,1))预测精度浅析.公路交通科技,2008,25(9):346–349.10 赵庆展,张清,宁川.基于 OpenGL 的 DEM 地形可视化和虚拟漫游系统.计算机系统应用,2006,15(5):66–69.。
常用轨迹预测算法近年来,随着人工智能和自动驾驶技术的发展,轨迹预测算法在交通领域中扮演着重要的角色。
准确地预测其他交通参与者的轨迹可以帮助自动驾驶系统做出更准确的决策,提高交通安全性和效率。
本文将介绍几种常用的轨迹预测算法,并分析其优缺点。
1. 卡尔曼滤波算法卡尔曼滤波算法是一种经典的轨迹预测算法,适用于线性系统。
它基于贝叶斯滤波理论,通过对系统动力学和观测模型进行建模,利用当前观测值和先验信息推测未来状态。
卡尔曼滤波算法具有计算效率高、准确性较高的优点,但对于非线性系统和非高斯分布的噪声不适用。
2. 粒子滤波算法粒子滤波算法是一种基于蒙特卡洛方法的轨迹预测算法,适用于非线性系统和非高斯分布的噪声。
它通过在状态空间中生成一组粒子,并根据观测值对粒子进行重采样,最终得到轨迹的估计。
粒子滤波算法能够处理非线性系统和非高斯噪声,但计算复杂度较高,且对粒子数目的选择敏感。
3. 长短时记忆网络(LSTM)LSTM是一种常用的递归神经网络(RNN)的变体,能够处理序列数据。
在轨迹预测中,可以将轨迹序列作为输入,通过训练网络学习轨迹的模式和规律,然后使用学习到的模型预测未来轨迹。
LSTM 算法具有较强的学习能力,能够处理非线性关系和复杂的轨迹模式,但需要大量的训练数据,并且对网络结构的选择和参数的调整较为敏感。
4. 卷积神经网络(CNN)CNN是一种常用的神经网络结构,适用于处理图像和空间信息。
在轨迹预测中,可以将轨迹的历史轨迹数据转化为图像或向量表示,然后使用CNN进行特征提取和轨迹预测。
CNN算法具有较强的图像处理和特征提取能力,能够处理空间信息和局部模式,但对轨迹数据的表示和网络结构的选择较为关键。
5. 马尔科夫链模型马尔科夫链模型是一种基于概率和状态转移的轨迹预测算法。
它假设未来状态只与当前状态有关,与历史状态无关。
通过建立状态转移矩阵或概率模型,可以预测未来状态的概率分布。
马尔科夫链模型具有简单易用、计算效率高的优点,但对于复杂的轨迹模式和长期依赖关系较难建模。
考虑车辆间交互作用的驾驶意图预测方法范佳琦;何钢磊;张羽翔;王玉海【期刊名称】《同济大学学报:自然科学版》【年(卷),期】2021(49)S01【摘要】准确的意图预测可以帮助智能车辆更好地了解周围环境并做出更加安全的决策,从而提高自动驾驶的安全性,促进人机协同驾驶。
为了对驾驶员未来的意图做出更加精准的预测,提出了一种交互式意图预测方法。
首先,通过将隐马尔可夫模型(HMM)与高斯混合模型(GMM)相结合,在充分考虑周围场景信息后建立了行为识别模型,用于对当前的驾驶行为做出准确的判断。
然后,考虑到交通场景复杂多变的特点,提出基于意图的轨迹预测方法规划出一条最佳的行驶轨迹,并采用最大期望效用理论对未来的驾驶行为进行推理。
由于行为识别和意图推理模型综合考虑了交通态势的演变过程和车辆之间的交互作用,所以将两个模型得到的结果相结合可得到车辆最终预测出的驾驶意图。
最后,在NGSIM数据集对所提出的方法进行验证,结果表明提出的行为识别模型能够提前0.2~0.3 s识别出车辆的换道意图,结合未来意图推理模型,能够更加准确地预测出车辆未来的驾驶行为,由此可提高车辆驾驶的安全性。
【总页数】7页(P155-161)【作者】范佳琦;何钢磊;张羽翔;王玉海【作者单位】吉林大学汽车仿真与控制国家重点实验室;上汽乘用车有限公司智能驾驶中心【正文语种】中文【中图分类】U461【相关文献】1.考虑周边车辆驾驶意图的换道危险预警研究2.考虑驾驶风格的车辆换道行为及预测模型3.考虑驾驶员紧急转向意图的ESP系统理想横摆角速度确定方法4.三星自动驾驶汽车运动预测专利可预测附近车辆运动意图5.考虑换道意图的LSTM-AdaBoost车辆轨迹预测模型因版权原因,仅展示原文概要,查看原文内容请购买。