基于EM算法的高斯混合模型参数估计
- 格式:pdf
- 大小:404.15 KB
- 文档页数:6

基于EM算法的混合模型参数估计作者:樊菊兰来源:《科教导刊·电子版》2018年第06期摘要有限混合模型是用于分析复杂问题的一个有效的建模工具。
在诸多的混合模型中,混合高斯模型的应用更为广泛,尤其是在图像处理、人脸识别、通信和信号处理等。
理论及数值试验充分证明:混合高斯分布模型能够逼近任何一个光滑分布,而对该模型参数的有效估计是准确分析、模拟复杂问题的必要前提。
EM算法自从提出,就已成为一种非常流行地处理不完全数据的极大似然估计的方法。
恰好我们经常处理的样本数据集通常可看作是不完全数据,进而EM算法就为混合高斯模型的参数估计提供了一种标准框架。
关键词 EM算法 R软件混合模型高斯混合参数估计中图分类号:O212 文献标识码:A0引言EM 算法就是一种一般的从“不完全数据”中求解模型参数的极大似然估计的方法,它是在观察数据的基础上添加一些“潜在数据”,从而简化计算并完成一系列简单的极大化或模拟。
EM 算法的每一步迭代中包括一个 E 步――期望步(Expectation Step)和一个M 步——极大似然步(Maximum Likelihood Step)。
算法的优势在于它在一定意义下可靠地收敛到局部极大,也就是说在一般条件下每次迭代都增加似然函数值,当似然函数值是有界的时候,迭代序列收敛到一个稳定值的上确界。
缺点是当缺失数据比例较大时候,它的收敛比率比较缓慢。
混合分布是有限个分布的组合,它综合了各个分支的性质和特点,它具有许多优势:(1)可以用来模拟复杂的数据或问题。
由于混合模型拥有许多不同类型的混合形式,有相同总体的混合,也有各种不同总体的混合。
因此,可以根据数据的不同情况,来选择与之相符的混合模型来进行模拟。
(2)为同性质和异性质的模拟提供了一个方法。
当m= l时,该模型就是一个单一分布。
当m〉l时,它就是分布的线性组合。
在现实生活中,许多现象都非常复杂,不同元素往往具有各不相同的性质,这时,混合模型是一个最合适的工具,因为它可以把元素所满足的分布都综合起来,组合成一个新的分布,在这个新的混合分布的基础上,再进行下一步的分析。
高斯混合模型中的参数估计与EM算法详解高斯混合模型(Gaussian Mixture Model,GMM)是一种常用的概率统计模型,用于描述由多个高斯分布构成的数据集。
在实际应用中,参数估计是使用GMM的关键步骤之一,而期望最大化(Expectation Maximization,EM)算法是一种常用的参数估计方法。
本文将详细介绍GMM的参数估计方法与EM算法的原理。
首先,我们需要理解高斯混合模型。
GMM是由多个高斯分布组合而成的概率分布模型。
每个高斯分布称为一个分量,是由均值、方差和权重组成的。
其中,均值表示分量的中心位置,方差表示分量的散布程度,权重表示每个分量在整个数据集中的相对重要性。
在GMM中,参数估计的目标是通过已知的数据集,估计出每个分量的均值、方差和权重。
而EM算法是实现这一目标的一种迭代优化算法。
EM算法的基本思想是通过迭代更新,不断提高参数估计的准确性。
具体而言,EM算法包含两个主要步骤:E步和M步。
在E步中,我们根据当前估计的参数值,计算每个样本属于各个分量的概率。
这个过程可以通过贝叶斯公式计算得到。
具体地,对于每个样本,我们根据当前的均值、方差和权重计算它属于每个分量的概率,并将其归一化,以保证所有样本在各个分量上的概率和为1。
在M步中,我们利用已经计算得到的样本属于各个分量的概率,更新参数的值。
具体而言,我们首先计算每个分量所占的样本的比例,即权重的估计值。
然后,对于每个分量,我们根据样本的加权平均值和方差来估计其均值和方差。
这里的权重就是E步中计算得到的样本属于各个分量的概率。
通过反复执行E步和M步,可以逐渐提高参数估计的准确性,直到满足停止准则为止。
通常情况下,停止准则可以是迭代次数达到一定阈值,或是参数变化的绝对值小于某个设定的阈值。
在实际应用中,选择适当的初始参数值对于EM算法的收敛至关重要。
一种常用的初始化方法是使用K-means算法来得到初始的均值估计。
具体而言,我们先用K-means算法将数据集聚类成K个簇,然后使用每个簇的中心作为每个分量的初始均值。
EM 算法在高斯混合模型中的应用1.定义对于一个随机信号生成器,假设他的模型参数为Θ,我们能观测到的数据输出为X ,不能观测到的数据输出为Y ,且随机系统模型结构的概率密度函数为(,|)p x y Θ (1)能够观测到的一部分数据输出数据12{,,...,}N x x x ,模型的另一部分输出数据 未知,模型的参数Θ也未知。
EM 算法就是要求我们从观测数据12{,,...,}N x x x 中估计出参数Θ。
2.EM 算法的描述假设每一对随机系统的输出样本(,)n n x y 对于不同的n 相互独立,这样当(,,)p x y Θ,x 和y 都已知的情况下,概率(,,)p x y Θ也已知。
未观测的输出y 的概率分布也属于待求参数Θ。
根据独立性假设有:1(,|)(,|)Nn n n p x y p x y =Θ=Θ∏ (2)3.EM 算法的基本思路基本问题是求解下面的方程的解:arg max (,|)p x y Θ=Θ (3) 由于X 是确定量,Y 是未知的,因此即使给定了Θ,也无法求得(,|)p x y Θ的值,因此我们只能退一步求:arg max (|)p x Θ=Θ (4)其中(|)(,|)[(|),(|,)]y Y y Y p x p x y p y p x y ∈∈Θ=Θ=ΘΘ∑∑ (5) 表示考虑了未知数据y 的所有可能的取值Y 后对(|,)p x y Θ求平均值。
最后根据log 函数的单调性得到(4)的等效形式:arg max log (|)p x Θ=Θ (6) 对于(6)给出的最优化问题,考虑用下面的递推算法解决,即:先给定一个估值k Θ并计算(|)k p x Θ,然后更新k Θ得到1k +Θ并且有1log (|)log (|)k k p x p x +Θ>Θ (7)()log (|)log [(|)(|,)]|(|,)log (|,)(|,)(|)(|,)(|,)log (|,)(,)y Y k ky Y k ky Y k p x p y p x y p y p x y p y x p y x p y p x y p y x p y x B ∈∈∈Θ=ΘΘΘΘ⎡⎤=Θ⎢⎥Θ⎣⎦⎧⎫⎡⎤ΘΘ≥Θ⎨⎬⎢⎥Θ⎣⎦⎩⎭=ΘΘ∑∑∑ (8) 其中,等号在(,)k k B ΘΘ时成立,即:(,)log (|)k k k B p x ΘΘ=Θ (9)于是对log (|)p x Θ的递推算法(7)可通过(,)k B ΘΘ进行,步骤为: 1) 令k=0,先给出估值 k Θ2) 然后找出1k +Θ满足 1(,)(,)k k k k B B +ΘΘ>ΘΘ (10) 3) k 更新为k+1并返回步骤2)直到收敛令 1arg max (,)k k B +Θ=ΘΘ (11) 处理后[]{}[]{}1arg max (,)(|)(|,)arg max (|,)log (|,)arg max (|,)log (|)(|,)(|,)log (|,)arg max (|,)log (|)(|,)arg max (,)k k k ky Y k k k y Y k y Y k B p y p x y p y x p y x P y x p y p x y p y x p y x p y x p y p x y C +∈∈∈Θ=ΘΘ⎧⎫⎡⎤ΘΘ=Θ⎨⎬⎢⎥Θ⎣⎦⎩⎭=ΘΘΘ-ΘΘ=ΘΘΘ=ΘΘ∑∑∑ (12)其中[]{}(,)(|,)log (|)(|,)k k y Y C p y x p y p x y ∈ΘΘ=ΘΘΘ∑ (13)4.EM 算法与高斯混合模型在随机系统模型中,假设m θ是通道m 的随机信号生成器的概率密度函数的参数,()p y m =是选中通道m 的概率。
EM算法详细例子及推导EM算法(Expectation-Maximization Algorithm)是一种用于求解含有隐变量(latent variable)的概率模型的参数估计方法。
其基本思想是通过迭代的方式,通过观测数据得到对隐变量的估计,然后再基于该估计对模型参数进行优化。
下面我们以一个简单的高斯混合模型为例,详细介绍EM算法的推导和实例。
1. 高斯混合模型(Gaussian Mixture Model, GMM)高斯混合模型是一种概率模型,由多个高斯分布组合而成。
假设我们观测到的数据由K个高斯分布组成,每个高斯分布对应一个参数向量:均值miu和方差sigma^2、同时,我们还有一个隐变量Z,表示观测数据属于哪个高斯分布,取值范围为{1,2,...,K}。
2.EM算法EM算法的核心思想是通过交替进行两个步骤:E步(Expectation)和M步(Maximization)。
在E步中,我们对当前模型参数下的隐变量进行估计,得到对隐变量的最大似然估计。
在M步中,我们利用得到的隐变量估计更新模型参数,使模型对观测数据的似然函数最大化。
不断重复这两步直至模型收敛。
下面我们通过具体的例子来推导EM算法。
假设我们观测到了一个数据集X = {x1, x2, ..., xn},我们希望通过EM算法对其进行建模。
Step1: 初始化模型参数首先,我们需要初始化模型参数。
选择K个高斯分布的参数miu和sigma^2,并假设所有的高斯分布对应的隐变量Z服从均匀分布。
这时,我们得到了初始模型参数Theta = {miu1, sigma^21, ..., miuK,sigma^K, pi1, pi2, ..., piK}。
Step2: E步,计算隐变量的后验分布在E步中,我们计算隐变量的后验分布。
对于每个观测样本xi,我们计算其属于每个高斯分布的概率,即:gamma(k,i) = P(Zi=k,xi, Theta) = P(Zi=k,xi, miu_k,sigma_k^2) = pi_k * N(xi,miu_k, sigma_k^2) / sum(pi_j * N(xi,miu_j, sigma_j^2), j=1 to K其中N(xi,miu_k, sigma_k^2)表示xi在第k个高斯分布下服从的概率密度函数。
高斯混合模型的超参数估计高斯混合模型(Gaussian Mixture Model,简称GMM)是一种概率模型,用于描述多个高斯分布的混合体。
在机器学习和数据科学中,高斯混合模型常用于聚类、异常检测和密度估计等任务。
超参数是在模型训练之前需要设置的参数,而不是通过训练得到的参数。
对于高斯混合模型的超参数估计,通常使用EM(Expectation-Maximization)算法。
EM算法是一种迭代算法,用于在存在隐变量或缺失数据的情况下进行参数估计。
在高斯混合模型中,隐变量是各个数据点所属的簇(即类别),而缺失数据则是各个数据点对应的簇中心位置(即均值向量和高斯分布的协方差矩阵)。
在EM算法中,每一步迭代都包含两个步骤:期望(E)步骤和最大化(M)步骤。
在期望(E)步骤中,计算每个数据点属于各个簇的概率。
这些概率基于当前参数的估计值,包括各个簇的中心位置、协方差矩阵以及簇的先验概率。
然后,根据这些概率更新隐变量的状态,即每个数据点所属的簇。
在最大化(M)步骤中,根据隐变量的状态和当前参数的估计值,更新模型的参数。
具体来说,更新各个簇的中心位置和协方差矩阵,以及簇的先验概率。
这一步的目标是最大化似然函数,即数据的概率分布。
通过反复迭代EM算法,直到参数收敛或达到预设的最大迭代次数,就可以得到高斯混合模型的超参数估计值。
这些估计值包括各个簇的中心位置、协方差矩阵以及簇的先验概率。
值得注意的是,高斯混合模型的超参数估计也可以使用其他方法,如网格搜索、贝叶斯方法和启发式方法等。
不同的方法可能在不同的数据集和任务上表现不同,因此在实际应用中需要根据具体情况选择合适的方法。
高斯混合模型em算法高斯混合模型(Gaussian Mixture Model,简称GMM)是一种概率模型,它能够将多个高斯分布组合在一起,从而更好地对数据进行建模和描述。
EM算法(Expectation-Maximization Algorithm,期望最大化算法)是一种常用于GMM参数估计的迭代算法。
本文将重点介绍GMM和EM算法,并对EM算法的具体步骤进行详细解释。
1. 高斯混合模型(Gaussian Mixture Model)高斯混合模型通过同时拟合多个高斯分布的线性组合来对数据进行建模。
设X为观测数据,其概率密度函数可以表示为:P(X) = Σk=1 to K (πk * N(x|μk, Σk))其中,N(x|μk, Σk)表示高斯分布的概率密度函数,πk为每个分布的权重,并满足Σk=1 to K πk = 1。
通过最大化似然函数,可以估计出每个高斯分布的参数μk和Σk。
2. EM算法(Expectation-Maximization Algorithm)EM算法是一种迭代算法,用于求解含有隐变量的概率模型参数估计问题。
EM算法通过交替进行E步和M步来迭代地逼近模型参数的最大似然估计。
- E步(Expectation Step):在E步中,通过当前的模型参数估计隐变量的期望。
对于GMM,E步的目标是计算每个样本属于每个高斯分布的后验概率。
- M步(Maximization Step):在M步中,根据E步计算得到的隐变量的期望,更新模型参数。
对于GMM,M步的目标是最大化对数似然函数,从而估计出每个高斯分布的参数μk和Σk。
具体的EM算法步骤如下:(1) 初始化参数,包括高斯分布的个数K、每个高斯分布的权重πk、每个高斯分布的均值μk和协方差矩阵Σk。
(2) 进行E步,计算每个样本属于每个高斯分布的后验概率。
根据当前的参数估计后验概率如下:γij = πj * N(xi|μj, Σj) / Σk=1 to K (πk * N(xi|μk, Σk))(3) 进行M步,更新模型参数。
高斯混合模型em算法高斯混合模型与EM算法高斯混合模型(Gaussian Mixture Model,GMM)是一种常用的概率模型,用于对多元数据进行建模和分析。
它可以描述一个数据集中包含的多个潜在的高斯分布,并通过EM算法来对模型参数进行估计。
本文将介绍高斯混合模型和EM算法的基本原理以及它们在实际应用中的一些例子。
高斯混合模型是由多个高斯分布组成的概率分布模型。
对于一个具有N个样本的数据集,高斯混合模型假设这些样本是由K个高斯分布组成的,每个高斯分布对应着数据集中的一个潜在成分。
每个样本点的生成过程可以表示为:```x = w_1 * N(mu_1, sigma_1^2) + w_2 * N(mu_2, sigma_2^2) + ... + w_K *N(mu_K, sigma_K^2)```其中,`x`为一个样本点,`N(mu_i, sigma_i^2)`表示一个高斯分布,`w_i`表示对应的样本点属于第i个高斯分布的概率。
高斯混合模型的目标是通过拟合样本数据,估计出每个高斯分布的参数以及每个样本点属于不同高斯分布的概率。
EM算法(Expectation-Maximization algorithm)是一种常用的估计高斯混合模型参数的方法。
EM算法的基本思路是通过迭代的方式,交替进行两个步骤:E步骤(Expectation)和M步骤(Maximization)。
具体每次迭代的过程如下:1. 初始化高斯混合模型的参数:包括每个高斯分布的参数(均值和方差)以及每个样本点属于不同高斯分布的概率。
2. E步骤:根据当前模型参数,计算每个样本点属于每个高斯分布的概率。
这个概率可以使用贝叶斯定理和高斯分布的概率密度函数得到。
3. M步骤:根据E步骤的计算结果,更新高斯分布的参数以及每个样本点属于不同高斯分布的概率。
通常使用最大似然估计的方法进行参数的更新。
4. 重复步骤2和步骤3,直到模型收敛或达到设定的迭代次数。
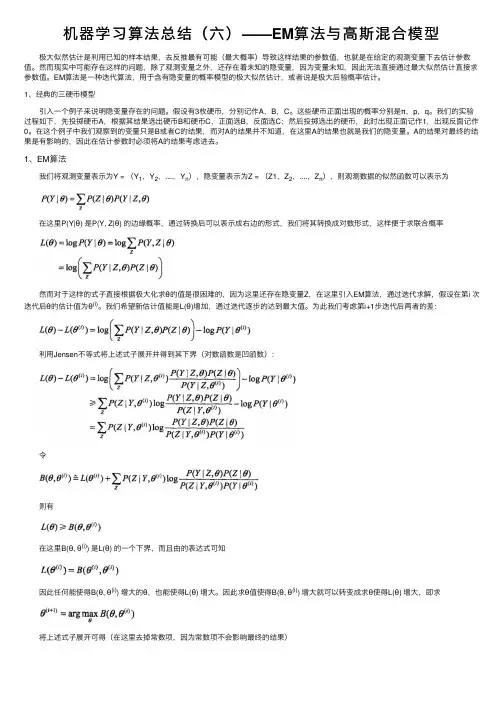
机器学习算法总结(六)——EM算法与⾼斯混合模型 极⼤似然估计是利⽤已知的样本结果,去反推最有可能(最⼤概率)导致这样结果的参数值,也就是在给定的观测变量下去估计参数值。
然⽽现实中可能存在这样的问题,除了观测变量之外,还存在着未知的隐变量,因为变量未知,因此⽆法直接通过最⼤似然估计直接求参数值。
EM算法是⼀种迭代算法,⽤于含有隐变量的概率模型的极⼤似然估计,或者说是极⼤后验概率估计。
1、经典的三硬币模型 引⼊⼀个例⼦来说明隐变量存在的问题。
假设有3枚硬币,分别记作A,B,C。
这些硬币正⾯出现的概率分别是π,p,q。
我们的实验过程如下,先投掷硬币A,根据其结果选出硬币B和硬币C,正⾯选B,反⾯选C;然后投掷选出的硬币,此时出现正⾯记作1,出现反⾯记作0。
在这个例⼦中我们观察到的变量只是B或者C的结果,⽽对A的结果并不知道,在这⾥A的结果也就是我们的隐变量。
A的结果对最终的结果是有影响的,因此在估计参数时必须将A的结果考虑进去。
1、EM算法 我们将观测变量表⽰为Y = (Y1,Y2,....,Y n),隐变量表⽰为Z = (Z1,Z2,....,Z n),则观测数据的似然函数可以表⽰为 在这⾥P(Y|θ) 是P(Y, Z|θ) 的边缘概率,通过转换后可以表⽰成右边的形式,我们将其转换成对数形式,这样便于求联合概率 然⽽对于这样的式⼦直接根据极⼤化求θ的值是很困难的,因为这⾥还存在隐变量Z,在这⾥引⼊EM算法,通过迭代求解,假设在第i 次迭代后θ的估计值为θ(i)。
我们希望新估计值能是L(θ)增加,通过迭代逐步的达到最⼤值。
为此我们考虑第i+1步迭代后两者的差: 利⽤Jensen不等式将上述式⼦展开并得到其下界(对数函数是凹函数): 令 则有 在这⾥B(θ, θ(i)) 是L(θ) 的⼀个下界,⽽且由的表达式可知 因此任何能使得B(θ, θ(i)) 增⼤的θ,也能使得L(θ) 增⼤。
因此求θ值使得B(θ, θ(i)) 增⼤就可以转变成求θ使得L(θ) 增⼤,即求 将上述式⼦展开可得(在这⾥去掉常数项,因为常数项不会影响最终的结果) 因此问题就演变成了求Q函数的极⼤化。
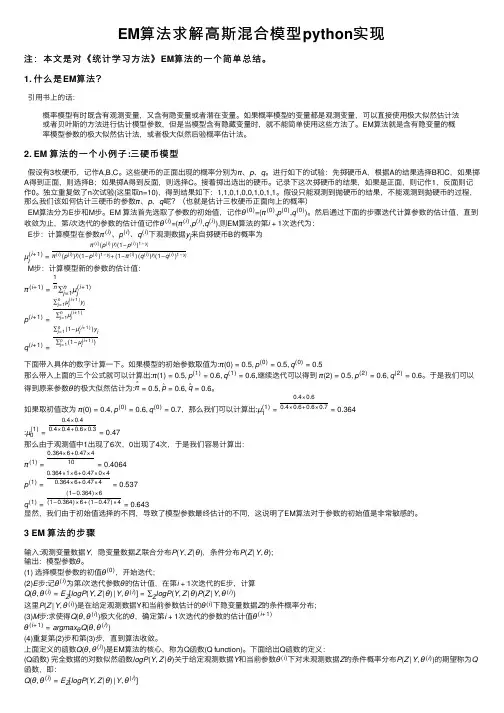
EM算法求解⾼斯混合模型python实现注:本⽂是对《统计学习⽅法》EM算法的⼀个简单总结。
1. 什么是EM算法?引⽤书上的话:概率模型有时既含有观测变量,⼜含有隐变量或者潜在变量。
如果概率模型的变量都是观测变量,可以直接使⽤极⼤似然估计法或者贝叶斯的⽅法进⾏估计模型参数,但是当模型含有隐藏变量时,就不能简单使⽤这些⽅法了。
EM算法就是含有隐变量的概率模型参数的极⼤似然估计法,或者极⼤似然后验概率估计法。
2. EM 算法的⼀个⼩例⼦:三硬币模型假设有3枚硬币,记作A,B,C。
这些硬币的正⾯出现的概率分别为π、p、q。
进⾏如下的试验:先掷硬币A,根据A的结果选择B和C,如果掷A得到正⾯,则选择B;如果掷A得到反⾯,则选择C。
接着掷出选出的硬币。
记录下这次掷硬币的结果,如果是正⾯,则记作1,反⾯则记作0。
独⽴重复做了n次试验(这⾥取n=10),得到结果如下:1,1,0,1,0,0,1,0,1,1。
假设只能观测到抛硬币的结果,不能观测到抛硬币的过程,那么我们该如何估计三硬币的参数π、p、q呢?(也就是估计三枚硬币正⾯向上的概率)EM算法分为E步和M步。
EM 算法⾸先选取了参数的初始值,记作θ(0)=(π(0),p(0),q(0))。
然后通过下⾯的步骤迭代计算参数的估计值,直到收敛为⽌,第i次迭代的参数的估计值记作θ(i)=(π(i),p(i),q(i)),则EM算法的第i+1次迭代为:E步:计算模型在参数π(i)、p(i)、q(i)下观测数据y j来⾃掷硬币B的概率为µ(i+1) j =π(i)(p(i))y j(1−p(i))1−y jπ(i)(p(i))y j(1−p(i))1−y j+(1−π(i))(q(i))y j(1−q(i))1−y jM步:计算模型新的参数的估计值:π(i+1)=1n∑nj=1µ(i+1)jp(i+1)=∑n j=1µ(i+1)jy j∑n j=1µ(i+1)jq(i+1)=∑n j=1(1−µ(i+1)j)y j∑n j=1(1−µ(i+1)j)下⾯带⼊具体的数字计算⼀下。
高斯混合模型(聚类).定义:122(y |)(y |)(y )..(y |))2Kk k k k k k p s t θαφθμφθσ==-=-∑ 由K 个高斯分布混合而成的分布模型红色线为最终模型的分布曲线。
其是由三个用蓝色线的高斯分布模型混合而成。
对于图像上某一点有:112233(x)(x)(x)(x)P p p p ααα=++类似于其他模型使用极大似然方法求解:求解一个分布函数p(x)使得按照这个分布,观测数据出现的概率最大。
对上述目标函数取对数有:可以发现上面函数包含和的对数。
很难通过求取偏导数而获得参数的值。
下面讲述如通过EM算法求解的思路。
一个假设:先假定,如果这个观测数据只是由其中一个高斯模型K产生,则隐变量是一个向量,并且这个向量中只有一个元素取值为1,其它的都是0。
然后计算分模型K对观测数据的响应度(E步)。
该响应度是一个概率值,表示该观测由该高斯分量唯一生成的概率值。
每个高斯分量其实都可以产生这个观测数据只是输出不同而已,即产生观测数据的概率不同。
最后,根据每个高斯分量对观测数据的响应度,计算更新每个分模型的参数,以及汇总出整个GMM产生这个观测数据的每个分模型权值。
计算过程分析:GMM:先计算所有数据对每个分模型的响应度。
求响应度隐变量的均值。
根据响应度计算每个分模型的参数。
极大化模型的似然函数迭代K-means:先计算所有数据对于K个点的距离,取距离最近的点作为自己所属于的类根据上一步的类别划分更新点的位置(点的位置就可以看做是模型参数)迭代Kmeans与高斯混合模型的异同点可以看出GMM和K-means还是有很大的相同点的。
GMM中高斯分量对数据的响应度就相当于K-means中根据距离,划分样本到与其最近的聚类中心,GMM中的根据响应度计算高斯分量参数就相当于K-means中计算聚类中心点的位置。
然后它们都通过不断迭代达到最优。
不同的是:GMM模型给出的是每一个观测点由哪个高斯分量生成的概率,而K-means直接给出一个观测点属于哪一类。
混合高斯模型(Mixtures of Gaussians)和EM算法这篇讨论使用期望最大化算法(Expectation-Maximization)来进行密度估计(density estimation)。
与k-means一样,给定的训练样本是,我们将隐含类别标签用表示。
与k-means的硬指定不同,我们首先认为是满足一定的概率分布的,这里我们认为满足多项式分布,,其中,有k个值{1,…,k}可以选取。
而且我们认为在给定后,满足多值高斯分布,即。
由此可以得到联合分布。
整个模型简单描述为对于每个样例,我们先从k个类别中按多项式分布抽取一个,然后根据所对应的k个多值高斯分布中的一个生成样例,。
整个过程称作混合高斯模型。
注意的是这里的仍然是隐含随机变量。
模型中还有三个变量和。
最大似然估计为。
对数化后如下:这个式子的最大值是不能通过前面使用的求导数为0的方法解决的,因为求的结果不是close form。
但是假设我们知道了每个样例的,那么上式可以简化为:这时候我们再来对和进行求导得到:就是样本类别中的比率。
是类别为j的样本特征均值,是类别为j的样例的特征的协方差矩阵。
实际上,当知道后,最大似然估计就近似于高斯判别分析模型(Gaussian discriminant analysis model)了。
所不同的是GDA中类别y是伯努利分布,而这里的z是多项式分布,还有这里的每个样例都有不同的协方差矩阵,而GDA中认为只有一个。
之前我们是假设给定了,实际上是不知道的。
那么怎么办呢?考虑之前提到的EM 的思想,第一步是猜测隐含类别变量z,第二步是更新其他参数,以获得最大的最大似然估计。
用到这里就是:在E步中,我们将其他参数看作常量,计算的后验概率,也就是估计隐含类别变量。
估计好后,利用上面的公式重新计算其他参数,计算好后发现最大化最大似然估计时,值又不对了,需要重新计算,周而复始,直至收敛。
的具体计算公式如下:这个式子利用了贝叶斯公式。
EM算法用于高斯混合模型EM算法(Expectation-Maximization algorithm)是一种迭代算法,用于估计含有隐变量的概率模型参数。
它被广泛应用于高斯混合模型(Gaussian Mixture Model,GMM)的参数估计。
GMM 是一种概率模型,它由若干个高斯分布组成,每个高斯分布对应数据的一个分量。
具体来说,EM算法包含两个步骤:E步骤(Expectation step)和M步骤(Maximization step)。
在E步骤中,给定当前参数估计,我们计算隐变量的期望值。
而在M步骤中,根据这些隐变量的期望值,我们重新估计参数。
这两个步骤会反复迭代,直到参数收敛为止。
首先,我们来看E步骤。
在GMM中,每个观测值都可以由多个高斯分布生成。
我们需要计算每个数据点属于每个高斯分布的后验概率。
这个后验概率可以表示为每个高斯分布生成一些数据点的概率除以所有高斯分布生成这个数据点的概率之和。
这个后验概率即为数据点属于每个高斯分布的权重。
计算后验概率的方法是使用贝叶斯公式。
然后,我们来看M步骤。
在M步骤中,我们根据E步骤计算得到的后验概率,重新估计高斯分布的参数。
具体来说,对于每个高斯分布,我们计算其均值和协方差矩阵。
均值可以通过将数据点乘以其对应的后验概率,再除以所有后验概率之和来计算。
协方差矩阵可以通过计算每个数据点与对应高斯分布的均值之间的差的外积,再乘以其对应的权重,最后除以所有权重之和来计算。
在每次迭代中,E步骤和M步骤会交替进行,直到算法收敛。
算法的收敛条件可以选择参数变化的很小或达到一定的迭代次数。
在每次迭代中,EM算法会逐渐提高对数据的拟合程度,也就是逐渐改善参数的估计。
EM算法有很多优点。
首先,它是一种通用的算法,适用于各种类型的概率模型估计。
其次,EM算法在估计参数时可以有很大的灵活性,可以根据需求自定义参数的个数和选择去模型每个分量的数据。
此外,EM 算法收敛到局部最优,而跳出局部最优通常需要全局优化方法。
EM算法用于高斯混合模型高斯混合模型(Gaussian Mixture Model,简称GMM)是一种常用的概率密度估计方法,其基本思想是将数据分解为由多个高斯分布组成的混合模型。
每个高斯分布对应于数据中的一个潜在类别,而混合系数则表示每个类别的权重。
GMM的参数估计通常使用期望最大化(Expectation Maximization,简称EM)算法来进行。
EM算法是一种迭代优化算法,用于求解含有隐变量的最大似然估计问题。
GMM中,EM算法被用来最大化对数似然函数,从而估计GMM的参数。
EM算法的基本思想是,在每一次迭代中,先进行E步(Expectation),计算隐变量在给定参数下的后验概率。
然后进行M步(Maximization),通过极大化对数似然函数来估计参数。
重复执行E步和M步,直到收敛为止。
在GMM中,E步计算的是隐藏变量对应的后验概率,即每个样本属于每个高斯分布的概率。
这个概率可以使用贝叶斯公式计算得到。
假设有N个样本,K个高斯分布,那么对于每个样本i和高斯分布j,可以计算其后验概率:$$w_{ij} = \frac{\pi_j \cdot \mathcal{N}(x_i,\mu_j,\Sigma_j)}{\sum_{k=1}^{K} \pi_k \cdot \mathcal{N}(x_i,\mu_k,\Sigma_k)}$$其中,$w_{ij}$表示样本i属于高斯分布j的后验概率,$\pi_j$表示高斯分布j的混合系数,$\mathcal{N}(x_i,\mu_j,\Sigma_j)$表示高斯分布j的概率密度函数。
在M步中,需要利用E步计算得到的后验概率,更新GMM的参数。
更新过程分两步进行:首先,根据后验概率的加权平均来更新混合系数,即每个高斯分布对应的权重;然后,根据后验概率的加权平均来更新高斯分布的均值和协方差矩阵。
混合系数的更新可以通过对每个高斯分布的后验概率求平均得到:$$\pi_j = \frac{1}{N} \sum_{i=1}^{N} w_{ij}$$高斯分布的均值和协方差矩阵的更新可以通过将样本加权平均来得到:$$\mu_j = \frac{1}{\sum_{i=1}^{N} w_{ij}} \sum_{i=1}^{N} w_{ij} \cdot x_i$$$$\Sigma_j = \frac{1}{\sum_{i=1}^{N} w_{ij}} \sum_{i=1}^{N}w_{ij} \cdot (x_i - \mu_j)(x_i - \mu_j)^T$$重复执行E步和M步,直到收敛为止。
基于EM算法的混合模型的参数估计
谢勤岚
【期刊名称】《计算机与数字工程》
【年(卷),期】2006(34)12
【摘要】介绍了极大似然参数估计,然后介绍了混合模型极大似然参数估计的EM 算法实现,最后利用计算机仿真实验验证了此算法的有效性和收敛性.
【总页数】3页(P42-44)
【作者】谢勤岚
【作者单位】中南民族大学电子信息工程学院,武汉,430074
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于EM算法的混合模型参数估计 [J], 樊菊兰
2.基于EM算法的高斯混合模型参数估计 [J], 余爱华
3.基于EM算法的混合自回归滑动平均模型的参数估计 [J], 安潇潇;单锐;刘文;杨洋
4.基于EM算法的高斯混合模型参数估计 [J], 梁盛楠
5.基于EM算法的混合t-分布模型参数估计 [J], 王小英;李迎华;杨雪梅
因版权原因,仅展示原文概要,查看原文内容请购买。
混合高斯分布的em算法
混合高斯分布是一种常用的数据建模方法,它假设数据样本是由多个高斯分布的混合所组成。
EM算法是一种用于估计混合高斯分布参数的常用方法。
具体步骤如下:
1. 初始化混合系数、均值和协方差矩阵:随机初始化混合系数、均值和协方差矩阵来作为模型参数。
2. E步骤:计算每个样本点属于每个高斯分布的概率。
3. M步骤:基于E步骤中计算出的概率,分别计算每个高斯分布的混合系数、均值和协方差矩阵。
4. 重复执行E步骤和M步骤,直到似然函数收敛或达到指定的最大迭代次数。
5. 输出混合系数、均值和协方差矩阵作为混合高斯分布模型的参数。
EM算法的核心是通过E步骤计算样本点的概率,并通过M步骤更新混合高斯分布的模型参数。
这两个步骤交替执行,不断迭代,直到达到收敛条件。
最终得到的模型可以用于数据分类、聚类等应用中。