机械动力学第四章——动静力分析
- 格式:ppt
- 大小:1.74 MB
- 文档页数:18
机械结构的静力学和动力学分析引言:机械结构是人类创造的一种工程物体,它由各种零部件组成,通过各种连接方式将这些零部件联系在一起以实现特定的功能。
为了确保机械结构的稳定性和可靠性,静力学和动力学分析成为设计和优化过程中的重要环节。
本文将重点探讨机械结构的静力学和动力学分析。
一、静力学分析静力学分析是指在无外力作用的情况下,研究物体受力平衡状态的一门学科。
在机械结构设计中,静力学分析能够帮助工程师确定结构的受力情况,从而避免结构出现不稳定或失效的情况。
1. 静力平衡静力平衡是指物体在静止的状态下,各个受力部分之间的力的平衡关系。
它遵循牛顿第一定律,即物体在静止状态时,受力之和为零。
静力平衡方程可以用来求解机械结构中的受力分布,进而评估结构的稳定性。
2. 支持方式机械结构的支持方式对其静力分析有重要影响。
常见的支持方式包括铰接支持、固定支持、滑动支持等。
不同的支持方式对结构受力分布和力的大小有明显的影响,工程师需要根据具体情况选择合适的支持方式。
3. 受力计算在机械结构的设计中,受力计算是静力学分析的重要环节。
通过使用力的平衡、力矩平衡和应力平衡等原理,可以确定结构中各个部件的受力情况。
受力计算的结果可以用来评估结构的稳定性,为结构设计提供依据。
二、动力学分析动力学分析是指研究物体在受到外力作用下的运动规律,包括速度、加速度和位移等方面的研究。
在机械结构设计中,动力学分析可以帮助工程师确定结构的振动特性,从而保证结构具有良好的动力性能。
1. 动力学基本定律动力学分析基于牛顿第二定律,即力等于物体质量乘以加速度。
该定律描述了物体在受到外力作用下的加速度变化情况,通过解析该方程,可以确定结构在外力作用下的运动规律。
2. 自由振动和强迫振动机械结构在受到外部激励作用下可能出现自由振动和强迫振动两种形式。
自由振动是指结构在无外部激励的情况下的振动行为,其振动频率和振动模态由结构自身的特性决定。
强迫振动是指结构在受到外部激励的情况下的振动行为,外部激励可能与结构的特性频率相同或不同,从而引起结构的共振或非共振振动。

机械原理知识点归纳总结第一章绪论基本概念:机器、机构、机械、零部件、框架、原动机和从动件。
第二章是平面机构的结构分析机构运动简图的绘制、运动链成为机构的条件和机构的组成原理是本章学习的重点。
1.机构运动简图的绘制机构运动图的绘制不仅是本章的重点,也是难点。
为保证机构运动简图与实际机械有完全相同的结构和运动特性,对绘制好的简图需进一步检查与核对(运动副的性质和数目来检查)。
2.运动链成为机构的条件本章的重点是判断所设计的运动链是否能成为一个机构。
运动链成为机构的条件是:原动件数目等于运动链的自由度数目。
机构自由度的计算误差会导致对机构运动的可能性和确定性的错误判断,影响机械设计的正常进行。
机构自由度计算是本章学习的重点。
准确识别复合材料铰链、局部自由度和虚拟约束,并正确处理。
(1)复合铰链复合铰链是指两个以上的构件在同一处以转动副相联接时组成的运动副。
正确的处理方法:对于在同一位置形成复合铰链的K个部件,旋转副的数量应为(K-1)。
(2)局部自由度局部自由度是机构中某些构件所具有的并不影响其他构件的运动的自由度。
局部自由度常发生在为减小高副磨损而增加的滚子处。
正确处理方法:从机构自由度计算公式中将局部自由度减去,也可以将滚子及与滚子相连的构件固结为一体,预先将滚子除去不计,然后再利用公式计算自由度。
(3)虚约束虚拟约束是机构中不产生实际约束效果的重复约束。
正确处理方法:计算自由度时,首先将引入虚约束的构件及其运动副除去不计,然后用自由度公式进行计算。
虚拟约束出现在某些几何条件下,其中一些是隐含的,一些是显式的。
对于隐含的几何条件,需要通过直观判断来识别虚拟约束;对于给定的几何条件,只有通过严格的几何证明才能识别。
3.机构组成原理及结构分析机构的组成过程和机构的结构分析过程正好相反,前者是研究如何将若干个自由度为零的基本杆组依次联接到原动件和机架上,以组成新的机构,它为设计者进行机构创新设计提供了一条途径;后者是研究如何将现有机构依次拆成基本杆组、原动件及机架,以便对机构进行结构分类。
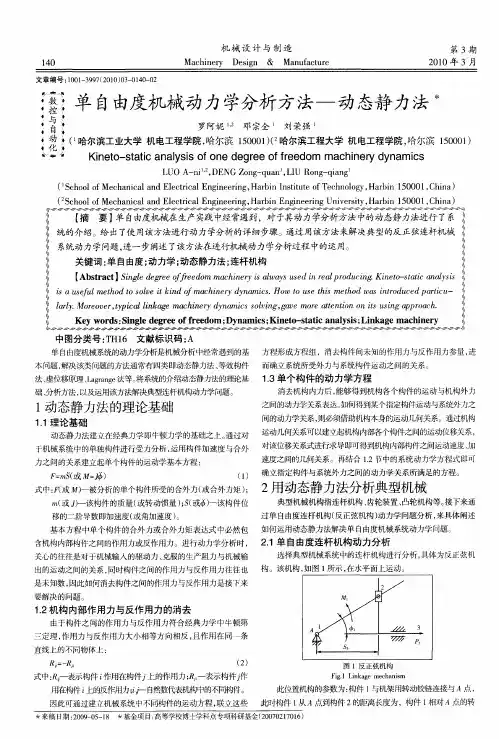
4.4平面机构的动态静力分析平面机构的动态静力分析是指计入构件的重力、惯性力以及惯性力矩时,假定机械的主动件作匀速运动,分析作用在机构上的外力之间的关系以及运动副之间的相互作用力。
对平面机构作动态静力分析可以采用图解方法,也可以采用解析方法。
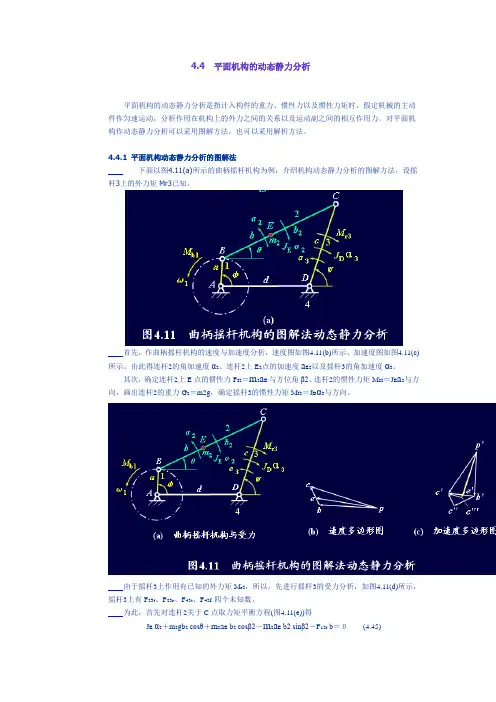
4.4.1平面机构动态静力分析的图解法下面以图4.11(a)所示的曲柄摇杆机构为例,介绍机构动态静力分析的图解方法,设摇杆3上的外力矩Mr3已知。
首先,作曲柄摇杆机构的速度与加速度分析,速度图如图4.11(b)所示、加速度图如图4.11(c)所示。
由此得连杆2的角加速度α2、连杆2上E2点的加速度a E2以及摇杆3的角加速度α3。
其次,确定连杆2上E点的惯性力F I2=m2a E与方位角β2、连杆2的惯性力矩M I2=J E a2与方向,画出连杆2的重力G2=m2g,确定摇杆3的惯性力矩M I3=J Dα3与方向。
由于摇杆3上作用有已知的外力矩M r3,所以,先进行摇杆3的受力分析,如图4.11(d)所示,摇杆3上有F23t、F23r、F43t、F43r四个未知数。
为此,首先对连杆2关于C点取力矩平衡方程(图4.11(e))得J Eα2+m2gb2cosθ+m2a E b2cosβ2-m2a E b2 sinβ2-F12t b=0(4.45)由式(4.45)得曲柄1 对连杆2的作用力F12t为F12t=J Eα2+m2gb2cosθ+m2a E b2 cosβ2-m2a E b2 sinβ2/ b曲柄1上的平衡力矩Mb1由曲柄1关于A点的力矩平衡方程求出。
M9-F21r cosθ a sinφ+F21r sinθ a cosφ-F21t cos(θ+3π/4)a sinφ-F21t sin(θ+3π/4) a cosφ=0(4.50)4.4.2平面机构动态静力分析的解析法1)曲柄摇杆机构的动态静力分析在图4.12(a)所示的曲柄摇杆机构中,已知工作阻力矩M r3、机构的尺寸、构件的质量与转动惯量。
本科生《机械动力学》课程介绍一、课程基本信息1、课程代码:ME4022、课程名称:机械动力学/Machinery Dynamics3、学时/学分:36/24、开课院(系)、教研室:机械与动力工程学院、汽车工程研究院5、先修课程:(1)理论力学;(2)机械原理6、面向对象:本科生7、教材、教学参考书:《机械动力学》,张策主编,高等教育出版社,2000年。
二、课程性质和任务随着科技的飞速发展,现代机械系统的动力学分析、设计和控制技术成为产品技术水平和市场竞争力的关键之一。
本科生《机械动力学》课程为我院机械工程、热能动力工程专业的一门专业选修课,其主要目的是介绍现代机械系统动力学的理论、方法、工具和应用,将促使学生掌握高水平机械系统分析和设计的方法,拓宽知识面和视野。
课程主要任务是让学生初步掌握现代机械系统动力学,尤其是多体系统理论的建模、分析和计算的基本方法。
介绍机械系统动力学分析软件ADAMS、动力学分析与控制一体化仿真软件Simulink和动力学实时仿真与虚拟现实演示技术。
介绍机械系统动力学方法在机器人动力学、回转机械动力学、车辆动力学、动力机械、航天器动力学、人体与生物力学等多个领域的应用与发展。
通过课程学习,达到初步掌握简单机械系统的动力学分析,了解机械动力学学科发展的前沿问题和相关领域工程应用的目的。
为学习后继课程、从事相关领域的工程技术工作、科学研究,以及开拓新技术领域,打下坚实的基础。
三、教学内容和基本要求课程主要内容及学时描述:1.引言(2学时)机械系统动力学的发展历史;机械系统动力学的研究前沿;机械系统动力学的研究对象。
2.机械系统的动态静力分析(2学时)机构动态静力分析的概述;平面机构的动态静力分析,机械系统动力学逆问题及应用。
3.机械系统的平衡(2学时)平面机构平衡的概述;平面连杆机构惯性力的完全平衡;平面连杆机构惯性力矩的完全平衡;平面连杆机构的优化平衡。
4.单自由度机构动态分析与速度波动调节(4学时)单自由度机械系统动力学概述;作用在机械系统上的力;等效力学模型;运动方程式的求解方法;稳定运动状态的动力学分析;周期性速度波动的调节。
1·什么是机械动力学?研究机械动力学的目的是什么答:机械动力学是研究机械在力的作用下的运动和机械在运动过程中产生的力,并从力和运动相互作用的角度进行机械的设计与改进的科学。
研究目的:分析和综合两个方面,分析:研究现有的机械;综合:设计新机械使之达到给定的运动学,动力学要求2·什么是机械动力学的正问题?什么是机械动力学的反问题?正问题:给定机械的输入力合阻力的变化规律,求解机器的实际运动规律反问题:已知机构的运动和阻力,求解应施加于原动构件上的平衡力,以及各运动副的反力 3·什么是动态静力分析?答:根据达朗贝尔原理,将惯性力计入静力平衡方程,来求出为平衡静载荷和动载荷而需要在驱动构件上施加的输入力或力矩,以及各运动副中的反作用力,这种分析方法为动态静力分析4·什么是机械的平衡?平衡的目的?惯性力对机械的不良作用?答:使机械中的惯性力得到平衡,这个平衡为机械的平衡平衡目的:消除或者部分消除惯性力对机械的不良作用,从而减轻机械振动,改善机械工作性能,提高机械工作质量,延长机械使用寿命,减轻噪音污染不良作用包括:(1)惯性力在机械各运动副中产生附加的动压力增加运动副的摩擦磨损从而降低机械的效率和寿命(2)惯性力的大小和方向产生周期性的变化引起机械及基础发生振动使机械工作精度和可靠性下降,也造成零件内部的疲劳损坏。
当振动频率接近振动系统的固有频率时会产生共振,从而引起其机器和厂房的破坏甚至造成人员伤亡5·什么是摆动力和摆动力矩答:摆动力为机构所有运动构件惯性力之合力。
摆动力矩为机构所有运动构件惯性载荷的合力矩6·什么是静代换?什么是动代换?答:使惯性力保持不变的代换为静代换;使惯性力和惯性力矩均保持不变的代换为动代换 7·质量代换三个条件:1.各代换质量综合应等于原来构件的质量2.各代换质量的总质心应与原来的质心相重合 3.各代换质量对坐标原点的转动惯量之和应等于原构件对坐标原点的转动惯量8·机械的不完全平衡:只考虑惯性力平衡,而不考虑惯性力矩平衡的平衡方法机械的完全平衡:使摆动力和摆动力矩均为零的平衡方法完全平衡的条件:n x i i i=1m x =0F =-∑ ; ..n y i=1F 0y i m i =-=∑;n-1......i z i i i i=1F x y y )0i i i m x J =--+∅=∑【(】达到完全平衡的方法:利用机构对称平衡和平衡质量平衡完全平衡优点:减少惯性载荷的影响 缺点:导致机械结构复杂,机械质量大为增加 9·机械的开始运动到终止运动分为哪三个阶段,各是什么特点1) 启动阶段 驱动力功大于阻力功,机械的动能增加,速度加快2) 稳定运行阶段 在这个运动循环中驱动力功等于阻力功,动能的总变化等于零。
1《机械动力学》课程教学大纲 课程名称:机械动力学(400+)课程代码:学分/学时:3学分/51学时开课学期:秋季学期、春季学期适用专业:机械设计及理论、机械制造工艺与设备、机械电子工程、车辆工程、热能与动力工程、核工程、建筑环境与设备先修课程:理论力学、机械设计基础三(机械原理)后续课程:高等机械动力学(研究生课程500+)开课单位:机械与动力工程学院一、课程性质和教学目标(需明确各教学环节对人才培养目标的贡献,专业人才培养目标中的知识、能力和素质见附表)课程性质:随着科技的飞速发展,现代机械系统的动力学分析、设计和控制技术成为机械产品技术水平和市场竞争力的关键之一。
本科生《机械动力学》课程为我院机械工程专业的一门专业选修课。
课程将介绍现代机械系统动力学的建模、分析和计算的基本方法和软件工具,以及在机器人动力学、回转机械动力学、车辆动力学、动力机械、航天器动力学、运动生物力学等多个领域的应用与发展,使学生掌握高水平机械系统分析和设计的方法,拓宽知识面和视野。
教学目标:课程的教学目标是让学生初步掌握现代机械系统动力学,尤其是多体系统理论的建模、分析和计算的基本方法,达到初步掌握简单机械系统的动力学分析方法,了解机械动力学学科发展的前沿问题和相关领域工程应用的目的,为学习后继课程、从事相关领域的工程技术工作、科学研究,以及开拓新技术领域,打下坚实的基础。
具体包括基础知识、理论方法和工程应用三个方面的教学目标:1.基础知识教学目标:掌握机械动力学建模和分析的基本原理。
[A3]22.理论方法教学目标:掌握机械动力学学科的基本概念和理论分析方法,包括动力学正问题与逆问题、动力学分析和综合方法、多刚体动力学方法等基本理论知识,为未来从事研究生深造的学生提供基础;[A4]3.工程应用教学目标:机械动力学分析实践能力的锻炼,培养学生运用机械动力学建模和分析方法,对实际机械系统进行动力学分析的能力,了解机器人动力学、回转机械动力学、车辆动力学等领域应用,具备从事机械系统动态性能分析和设计的工程应用能力;[A5,B2]二、课程教学内容及学时分配(含实践、自学、作业、讨论等的内容及要求)1.引言(2学时)内容:机械系统动力学的发展历史;机械系统动力学的研究前沿;机械系统动力学的研究对象。