第二章-运算放大器(第五版)
- 格式:ppt
- 大小:2.63 MB
- 文档页数:52

模拟电子技术基础复习提纲第一章绪论)信号、模拟信号、放大电路、三大指标。
(放大倍数、输入电阻、输出电阻)第三章二极管及其基本电路)本征半导体:纯净结构完整的半导体晶体。
在本征半导体内,电子和空穴总是成对出现的。
N型半导体和P型半导体。
在N型半导体内,电子是多数载流子;在P型半导体内,空穴是多数载流子。
载流子在电场作用下的运动称为漂移;载流子由高浓度区向低浓度区的运动称为扩散。
P型半导体和N型半导体的接触区形成PN结,在该区域中,多数载流子扩散到对方区域,被对方的多数载流子复合,形成空间电荷区,也称耗尽区或高阻区。
空间电荷区内电场产生的漂移最终与扩散达到平衡。
PN结最重要的电特性是单向导电性,PN结加正向电压时,电阻值很小,PN结导通;PN结加反向电压时,电阻值很大,PN结截止。
PN 结反向击穿包括雪崩击穿和齐纳击穿;PN结的电容效应包括扩散电容和势垒电容,前者是正向偏置电容,后者是反向偏置电容。
)二极管的V-I 特性(理论表达式和特性曲线))二极管的三种模型表示方法。
(理想模型、恒压降模型、折线模型)。
(V BE=)第四章双极结型三极管及放大电路基础)BJT的结构、电路符号、输入输出特性曲线。
(由三端的直流电压值判断各端的名称。
由三端的流入电流判断三端名称电流放大倍数))什么是直流负载线什么是直流工作点)共射极电路中直流工作点的分析与计算。
有关公式。
(工作点过高,输出信号顶部失真,饱和失真,工作点过低,输出信号底部被截,截止失真)。
)小信号模型中h ie和h fe含义。
)用h参数分析共射极放大电路。
(画小信号等效电路,求电压放大倍数、输入电阻、输出电阻)。
)常用的BJT放大电路有哪些组态(共射极、共基极、共集电极)。
各种组态的特点及用途。
P147。
(共射极:兼有电压和电流放大,输入输出电阻适中,多做信号中间放大;共集电极(也称射极输出器),电压增益略小于1,输入电阻大,输出电阻小,有较大的电流放大倍数,多做输入级,中间缓冲级和输出级;共基极:只有电压放大,没有电流放大,有电流跟随作用,高频特性较好。
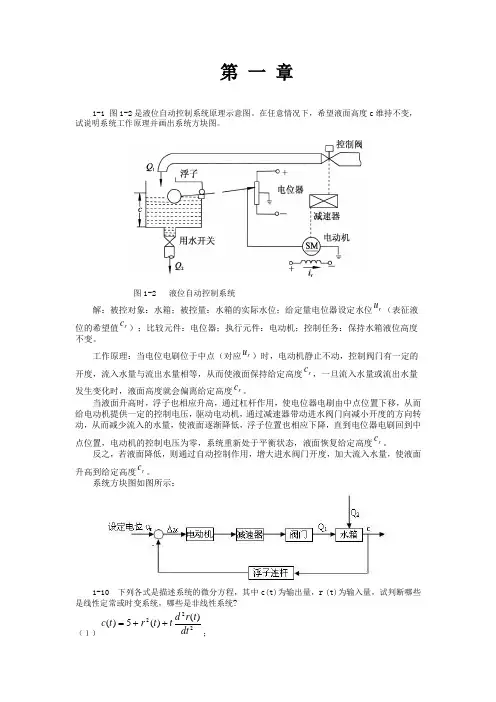
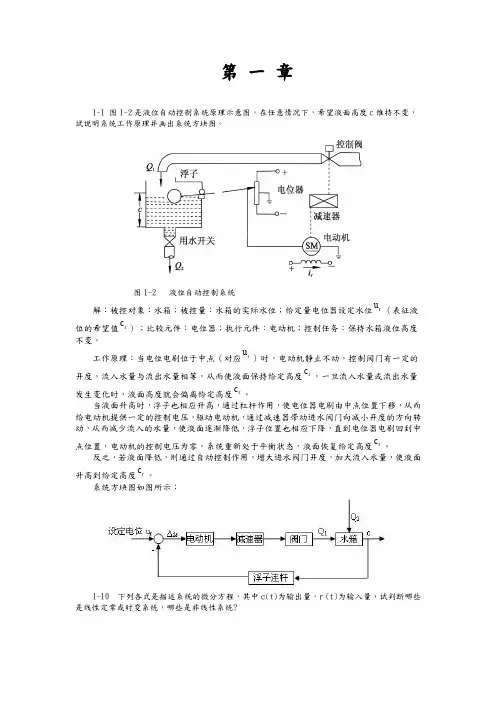
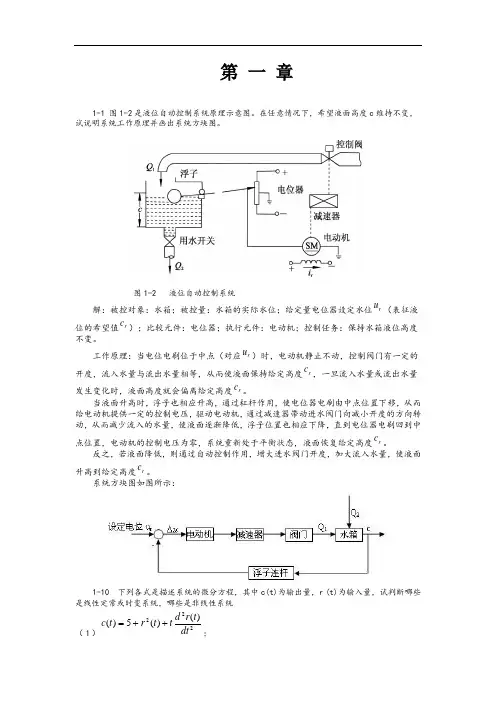
第 一 章1-1 图1-2是液位自动控制系统原理示意图。
在任意情况下,希望液面高度c 维持不变,试说明系统工作原理并画出系统方块图。
图1-2 液位自动控制系统解:被控对象:水箱;被控量:水箱的实际水位;给定量电位器设定水位r u (表征液位的希望值r c );比较元件:电位器;执行元件:电动机;控制任务:保持水箱液位高度不变。
工作原理:当电位电刷位于中点(对应r u )时,电动机静止不动,控制阀门有一定的开度,流入水量与流出水量相等,从而使液面保持给定高度r c ,一旦流入水量或流出水量发生变化时,液面高度就会偏离给定高度r c。
当液面升高时,浮子也相应升高,通过杠杆作用,使电位器电刷由中点位置下移,从而给电动机提供一定的控制电压,驱动电动机,通过减速器带动进水阀门向减小开度的方向转动,从而减少流入的水量,使液面逐渐降低,浮子位置也相应下降,直到电位器电刷回到中点位置,电动机的控制电压为零,系统重新处于平衡状态,液面恢复给定高度r c。
反之,若液面降低,则通过自动控制作用,增大进水阀门开度,加大流入水量,使液面升高到给定高度r c。
系统方块图如图所示:1-10 下列各式是描述系统的微分方程,其中c(t)为输出量,r (t)为输入量,试判断哪些是线性定常或时变系统,哪些是非线性系统?(1)222)()(5)(dt t r d tt r t c ++=;(2))()(8)(6)(3)(2233t r t c dt t dc dt t c d dt t c d =+++;(3)dt t dr t r t c dt t dc t )(3)()()(+=+; (4)5cos )()(+=t t r t c ω;(5)⎰∞-++=t d r dt t dr t r t c ττ)(5)(6)(3)(;(6))()(2t r t c =;(7)⎪⎩⎪⎨⎧≥<=.6),(6,0)(t t r t t c解:(1)因为c(t)的表达式中包含变量的二次项2()r t ,所以该系统为非线性系统。
第 一 章1-1 图1-2是液位自动控制系统原理示意图。
在任意情况下,希望液面高度c 维持不变,试说明系统工作原理并画出系统方块图。
图1-2 液位自动控制系统解:被控对象:水箱;被控量:水箱的实际水位;给定量电位器设定水位ru (表征液位的希望值rc );比较元件:电位器;执行元件:电动机;控制任务:保持水箱液位高度不变。
工作原理:当电位电刷位于中点(对应ru )时,电动机静止不动,控制阀门有一定的开度,流入水量与流出水量相等,从而使液面保持给定高度rc ,一旦流入水量或流出水量发生变化时,液面高度就会偏离给定高度r c。
当液面升高时,浮子也相应升高,通过杠杆作用,使电位器电刷由中点位置下移,从而给电动机提供一定的控制电压,驱动电动机,通过减速器带动进水阀门向减小开度的方向转动,从而减少流入的水量,使液面逐渐降低,浮子位置也相应下降,直到电位器电刷回到中点位置,电动机的控制电压为零,系统重新处于平衡状态,液面恢复给定高度r c。
反之,若液面降低,则通过自动控制作用,增大进水阀门开度,加大流入水量,使液面升高到给定高度r c。
系统方块图如图所示:1-10 下列各式是描述系统的微分方程,其中c(t)为输出量,r (t)为输入量,试判断哪些是线性定常或时变系统,哪些是非线性系统?(1)222)()(5)(dt t r d tt r t c ++=; (2))()(8)(6)(3)(2233t r t c dt t dc dt t c d dt t c d =+++;(3)dt t dr t r t c dt t dc t )(3)()()(+=+; (4)5cos )()(+=t t r t c ω;(5)⎰∞-++=t d r dt t dr t r t c ττ)(5)(6)(3)(;(6))()(2t r t c =;(7)⎪⎩⎪⎨⎧≥<=.6),(6,0)(t t r t t c解:(1)因为c(t)的表达式中包含变量的二次项2()r t ,所以该系统为非线性系统。
第 一 章1-1 图1-2是液位自动控制系统原理示意图。
在任意情况下,希望液面高度c 维持不变,试说明系统工作原理并画出系统方块图。
图1-2 液位自动控制系统解:被控对象:水箱;被控量:水箱的实际水位;给定量电位器设定水位r u (表征液位的希望值r c );比较元件:电位器;执行元件:电动机;控制任务:保持水箱液位高度不变。
工作原理:当电位电刷位于中点(对应r u )时,电动机静止不动,控制阀门有一定的开度,流入水量与流出水量相等,从而使液面保持给定高度r c ,一旦流入水量或流出水量发生变化时,液面高度就会偏离给定高度r c。
当液面升高时,浮子也相应升高,通过杠杆作用,使电位器电刷由中点位置下移,从而给电动机提供一定的控制电压,驱动电动机,通过减速器带动进水阀门向减小开度的方向转动,从而减少流入的水量,使液面逐渐降低,浮子位置也相应下降,直到电位器电刷回到中点位置,电动机的控制电压为零,系统重新处于平衡状态,液面恢复给定高度r c。
反之,若液面降低,则通过自动控制作用,增大进水阀门开度,加大流入水量,使液面升高到给定高度r c。
系统方块图如图所示:1-10 下列各式是描述系统的微分方程,其中c(t)为输出量,r (t)为输入量,试判断哪些是线性定常或时变系统,哪些是非线性系统(1)222)()(5)(dt t r d tt r t c ++=;(2))()(8)(6)(3)(2233t r t c dt t dc dt t c d dt t c d =+++;(3)dt t dr t r t c dt t dc t )(3)()()(+=+; (4)5cos )()(+=t t r t c ω;(5)⎰∞-++=t d r dt t dr t r t c ττ)(5)(6)(3)(;(6))()(2t r t c =;(7)⎪⎩⎪⎨⎧≥<=.6),(6,0)(t t r t t c解:(1)因为c(t)的表达式中包含变量的二次项2()r t ,所以该系统为非线性系统。
本书翻译自S edra和Smith的《Microelectronic Circuits(5th Edition)》,该书是电子和计算机工程专业的一本权威的经典教材。
全书分为上下两册:上册主要内容包括:运算放大器,二极管,场效应晶体管,双极型晶体管,单极集成放大器,差分和多级放大器,反馈放大器,运算放大器和数据变换电路;下册主要内容包括:数字CMOS逻辑电路,寄存器和高级数字电路,滤波和调谐放大器,信号发生器和波形整形电路,输出级和功率放大器。
本书有450道以上的练习。
每道练习的下面都给出了答案,学生可以检查他们是否理解了所阅读的内容。
求解这些练习题应该可以使读者估计出他们对所学内容的掌握和理解程度。
此外,还给出了1370道以上的章后习题,大约三分之一是本版新增习题。
这些习题是针对各自章节的关键问题的,它们的难易程度用下面的方法来表示:难的习题用星号(*)标注,较难的习题用两个星号标注(**);非常难(和/或耗时)的习题用三个星号标注(***)。
和前面四个版本一样,本版中包含了许多例题。
这些例题以及大多数的习题和练习都基于实际电路和实际电路设计中碰到的应用。
第五版继续在许多例子的图形中使用数字来标注解答步骤,期望能增加课堂教学的互动性。
上册目录前言1 电子学简介1.1 信号1.2 信号频谱1.3 模拟信号与数字信号1.4 放大器1.5 放大器电路模型1.6 放大器频率响应1.7 数字逻辑反相器小结习题2 运算放大器2.1理想运算放大器2.2 反相组态2.3 同相组态2.4 差分放大器2.5 有限开环增益与带宽对电路性能的影响2.6 运算放大器的大信号工作性能2.7直流不完整性2.8 积分器与微分器2.9 运算放大器的SPICE模型与仿真实例小结习题3 二极管3.1 理想二极管3.2 结二极管端口特性3.3 二极管正向特性建模3.4 工作在反向击穿区域的二极管——齐纳二极管3.5 整流电路3.6 限幅电路与钳位电路3.7 二极管的物理特性3.8 特种二极管3.9 二极管的SPICE模型和仿真实例小结习题4 MOS场效应晶体管4.1 器件结构和物理特性4.2 电流-电压特性4.3 MOSFET直流电路4.4 作为放大器和开关的MOSFET4.5 MOS放大器电路的偏置4.6小信号工作与小信号模型4.7 单级MOS放大器4.8 MOSFET内部电容及高频模型4.9 CS放大器的频率响应4.10 CMOS数字逻辑反相器4.11 耗尽型MOSFET4.12 MOSFET的SPICE模型和仿真实例小结习题5 双极型晶体管5.1 器件结构与物理特性5.2 电流-电压特性5.3 作为放大器和开关的BJT5.4 BJT直流电路5.5 BJT放大器电路的偏置5.6 小信号工作与小信号模型5.7 单级BJT放大器5.8 BJT内部电容和高频模型5.9 共发射极放大器的频率响应5.10 基本BJT数字逻辑反相器5.11 BJT的SPICE模型和仿真实例小结习题6 单级集成电路放大器6.1 集成电路设计原则6.2 MOSFET与BJT的比较6.3 集成电路中的偏置——电流源、镜像电流源及电流导向电路6.4 高频响应——通论6.5 有源负载共源和共发射极放大器6.6 CS与CE放大器的高频响应6.7 有源负载共栅和共基放大器6.8 cascode放大器6.9 源极(射极)接负反馈的CS和CE放大器6.10 源极跟随器与射极跟随器6.11 一些实用的晶体管对放大器6.12 改进型镜像电流源电路6.13 SPICE仿真实例小结习题7 差分放大器与多级放大器7.1 MOS差分对7.2 MOS差分对的小信号工作特性7.3 BJT差分对7.4 差分放大器的其他非理想特性7.5 有源负载差分放大器7.6 差分放大器的频率响应7.7 多级放大器7.8 SPICE仿真实例小结习题8 反馈8.1 反馈放大器的基本结构8.2 负反馈的一些性质8.3 四种基本的反馈拓扑结构8.4 串连-并联反馈放大器8.5 串连-串联反馈放大器8.6 并联-并联和并连-并联反馈放大器8.7 环路增益的确定8.8 稳定性问题8.9 反馈对放大器极点的影响8.10 基于波特图的稳定性分析8.11 频率补偿小结习题9 运算放大器与数据转换电路9.1 两级CMOS运算放大器9.2 折叠cascode CMOS运算放大器9.3 741运算放大器电路9.4 741运算放大器的直流分析9.5 741电路的小信号分析9.6 741运算放大器的增益、频率响应和摆率9.7 数据转换器——导论9.8 D/A转换器电路9.9 A/D转换器电路9.10 SPICE仿真实例小结习题部分习题答案下册目录10 数字CMOS逻辑电路10.1 数字电路设计——概述10.2 CMOS反相器设计与性能分析10.3 CMOS逻辑门电路110.4 伪NMOS逻辑电路10.5 传输晶体管逻辑电路10.6 动态逻辑电路10.7 SPICE仿真实例小结习题11 存储器与高级数字电路11.1 锁存器与触发器11.2 多谐振荡器电路11.3 半导体存储器的类型与结构随机存储器单元11.4 随机存储器单元11.5 读放大器与地址译码器11.6 只读存储器11.7 射频耦合逻辑11.8 BiCMOS数字电路11.9 SPICE仿真实例小结习题12 滤波器与调谐放大器12.1 滤波器传输、分类和规范12.2 滤波器传输函数12.3 巴特沃斯和切比雪夫滤波器12.4 一阶和二阶滤波器函数12.5 二阶LCR谐振器12.6 基于电感替代的二阶有源滤波器12.7 基于双积分环结构的二阶有源滤波器12.8 带单级放大的双二次有源滤波器12.9 灵敏度12.10 开关电容滤波器12.11 调谐放大器12.12 SPICE仿真实例小结习题13 信号发生器与波形整形电路13.1 正弦波振荡器的基本原理13.2 运算放大器RC振荡器电路13.3 LC振荡器和晶体振荡器13.4 双稳态多谐振荡器13.5 基于非稳态多谐振荡器的方波和三角波发生器13.6 标准脉冲发生器——单稳态多谐振荡器13.7 集成电路计时器13.8 非线性波形整形电路13.9 精密整流电路13.10 SPICE仿真实例小结习题14 输出级与功率放大器14.1 输出级的分类14.2 A类输出级14.3 B类输出级14.4 AB类输出级14.5 AB类电路的偏置14.6 BJT功率管14.7 各种不同结构的AB类电路14.8 集成功率放大器14.9 MOS功率晶体管14.10 SPICE仿真实例小结习题部分习题答案附录A VLSI制造技术附录B 二端口网络附录C 一些有用的网络定理附录D 单时间常数电路附录E s域分析——极点、零点和波特图附录F 参考文献10 数字CMOS逻辑电路10.1 数字电路设计——概述10.2 CMOS反相器设计与性能分析10.3 CMOS逻辑门电路110.4 伪NMOS逻辑电路10.5 传输晶体管逻辑电路10.6 动态逻辑电路10.7 SPICE仿真实例小结习题11 存储器与高级数字电路11.1 锁存器与触发器11.2 多谐振荡器电路11.3 半导体存储器的类型与结构随机存储器单元11.4 随机存储器单元11.5 读放大器与地址译码器11.6 只读存储器11.7 射频耦合逻辑11.8 BiCMOS数字电路11.9 SPICE仿真实例小结习题12 滤波器与调谐放大器12.1 滤波器传输、分类和规范12.2 滤波器传输函数12.3 巴特沃斯和切比雪夫滤波器12.4 一阶和二阶滤波器函数12.5 二阶LCR谐振器12.6 基于电感替代的二阶有源滤波器12.7 基于双积分环结构的二阶有源滤波器12.8 带单级放大的双二次有源滤波器12.9 灵敏度12.10 开关电容滤波器12.11 调谐放大器12.12 SPICE仿真实例小结习题13 信号发生器与波形整形电路13.1 正弦波振荡器的基本原理13.2 运算放大器RC振荡器电路13.3 LC振荡器和晶体振荡器13.4 双稳态多谐振荡器13.5 基于非稳态多谐振荡器的方波和三角波发生器13.6 标准脉冲发生器——单稳态多谐振荡器13.7 集成电路计时器13.8 非线性波形整形电路13.9 精密整流电路13.10 SPICE仿真实例小结习题14 输出级与功率放大器14.1 输出级的分类14.2 A类输出级14.3 B类输出级14.4 AB类输出级14.5 AB类电路的偏置14.6 BJT功率管14.7 各种不同结构的AB类电路14.8 集成功率放大器14.9 MOS功率晶体管14.10 SPICE仿真实例小结习题部分习题答案附录A VLSI制造技术附录B 二端口网络附录C 一些有用的网络定理附录D 单时间常数电路附录E s域分析——极点、零点和波特图附录F 参考文献。
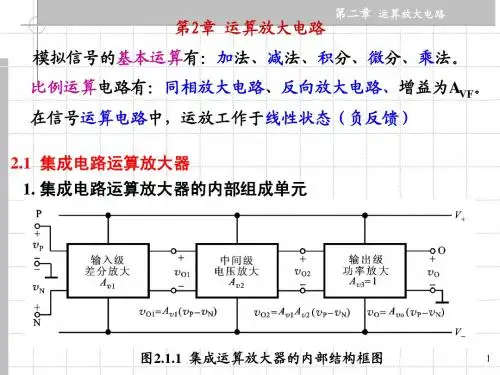
第二章运算放大器2.1 集成电路运算放大器2。
1。
1答;通常由输入级,中间级,输出级单元组成,输入级由差分式放大电路组成,可以提高整个电路的性能.中间级由一级或多级放大电路组成,主要是可以提高电压增益。
输出级电压增益为1,可以为负载提供一定的功率。
2.1.2答:集成运放的电压传输曲线由线性区和非线性区组成,线性区的直线的斜率即Vvo很大,直线几乎成垂直直线.非线性区由两条水平线组成,此时的Vo达到极值,等于V+或者V-。
理想情况下输出电压+Vom=V+,-Vom=V-。
2.1.3答:集成运算放大器的输入电阻r约为10^6欧姆,输出电阻r约为100欧姆,开环电压增益Avo约为10^6欧姆。
2.2 理想运算放大器2.2。
1答:将集成运放的参数理想化的条件是:1.输入电阻很高,接近无穷大。
2。
输出电阻很小,接近零.3.运放的开环电压增益很大。
2.2。
2答:近似电路的运放和理想运放的电路模型参考书P27。
2。
3 基本线性运放电路2.3。
1答:1.同相放大电路中,输出通过负反馈的作用,是使Vn自动的跟从Vp,使Vp≈Vn,或Vid=Vp-Vn≈0的现象称为虚短。
2。
由于同相和反相两输入端之间出现虚短现象,而运放的输入电阻的阻值又很高,因而流经两输入端之间Ip=In≈0,这种现象称为虚断。
3.输入电压Vi通过R1作用于运放的反相端,R2跨接在运放的输出端和反相端之间,同相端接地。
由虚短的概念可知,Vn≈Vp=0,因而反相输入端的电位接近于地电位,称为虚地。
虚短和虚地概念的不同:虚短是由于负反馈的作用而使Vp≈Vn,但是这两个值不一定趋向于零,而虚地Vp,Vn接近是零.2.3.2答:由于净输入电压Vid=Vi—Vf=Vp—Vm,由于是正相端输入,所以Vo为正值,Vo等于R1和R2的电压之和,所以有了负反馈电阻后,Vn增大了,Vp不变,所以Vid变小了,Vo变小了,电压增益Av=Vo/Vi变小了。
由上述电路的负反馈作用,可知Vp≈Vn,也即虚短。
电路(第五版).-邱关源原著-电路教案 -CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN第5章 含有运算放大器的电阻电路本章重点1、理想运算放大器的两个特性;2、节点法分析含理想运算放大器的电阻电路。
本章难点分析电路时理解虚断、虚短的含义。
教学方法本章是通过一些典型电路讲述了含运算放大器的电阻电路的分析方法。
采用讲授为主,自学为辅的教学方法。
共用2课时。
通过讲例题加以分析,深入浅出,举一反三,理论联系实际,使学生能学会学懂。
授课内容运算放大器是一种电压放大倍数很高的放大器,不仅可用来实现交流信号放大,而且可以实现直流信号放大,还能与其他元件组合来完成微分、积分等数学运算,因而称为运算放大器。
目前它的应用已远远超出了这些范围,是获得最广泛应用的多端元件之一。
5.1运算放大器的电路模型一、电路符号a 端—-反相输入端:在o 端输出时相位相反。
b 端—-同相输入端:在o 端输出时相位相同。
o 端—-输出端A —-放大倍数,也称作“增益”(开环放大倍数:输入端不受o 端影响)。
''''''()o ao bo o o b a u Au u Au u u u A u u =-=⇒=+=-差动输入方式二、端口方程:()o b a u A u u =- 三、电路模型:i o ioR R R R ----输入电阻输出电阻高输入,低输出电阻,A o b a a + _ a u _ + A b + _ b u -15V 0u _ + +__+a _+ +a ub u a ii R()b a A u u - Ro 0u b i0,""0000,""a i b o b a b a i R i R u u u u a b A ≈⎫→∞⎬≈⎭→⎫-≈≈⎬→∞⎭理想状态下,虚断电流可以为,但不能把支路从电路里断开。