机器人等级考试三四级产品资料-第十节 吹气球
- 格式:pdf
- 大小:1.64 MB
- 文档页数:18



全国青少年机器人技术等级考试三四级知识点概要(精髓)一、电子电路知识点摩擦起电:用摩擦的方法使物体带电。
强→得到电子→带负电摩擦起电两个物体摩擦时,哪个物体原子核束缚电子的本领弱→失去电子→带正电摩擦起电并不是创造电荷,只是电荷从一个物体转移到另一个物体,使正负电荷分开。
(负电荷发生转移)正电荷:丝绸摩擦玻璃棒所带的电荷两种电荷电荷负电荷:毛皮摩擦橡胶棒所带的电荷电荷量(电荷)表示:字母Q → 单位库仑→ 简称库→ 符号C。
电荷间的相互作用:同种电荷相互排斥,异种电荷相互吸引。
分子:一个原子或多个原子组成。
物质结构质子(带正电)原子核(带正电)原子(不带电)中子(不带电)电子(带负电)导体:容易导电的物体(金属、人体、大地、石墨、食盐水)→金属→自由电子导电导体绝缘体绝缘体:不容易导电的物体(橡胶、玻璃、塑料)→摩擦起电电源:提供电能的装置。
用电器(负载):消耗电能的装置。
电路组成作用导线(电线):将电路各部分连接起来形成回路。
开关:控制整个电路连接还是中断。
电路通路:有电流通过。
电路三种状态断路(开路):电路中没有电流。
短路:电源两极直接连接起来。
(不允许)用电器被短接:用电器不会正常工作。
电流的形成:电荷的定向移动形成电流。
1.自由移动的电荷(金属中自由电子)电流产生条件2.导体两端存在电压差→压力→电源提供3.电路中必须有闭合回路电源外部:电源正极→用电器→电源负极电流电流方向:正电荷移动的方向电源内部:电源负极→电源正极表示:字母I→ 单位安培→ 简称安→ 符号 A电流强弱(电流)单位时间内通过导体横截面的电荷量。
I=Q/t。
电流测量:电流表,串联在电路中电压提供:电源。
电源的作用就是给用电器两端提供电压。
电压与电流关系:要想电路中有电流,它的两端就必须有电压。
表示:字母U→ 单位伏特→ 简称伏→ 符号v电压电压测量:电压表,并联在被测物体两端。
家庭电路220v干电池1.5v常见电压电脑输电压出电压5v人体安全电压36v动力电路380v低压1000v以下高压1000v以上什么是电阻:导体对电流阻碍的大小用电阻来表示,电阻越大对电流的阻碍越大。
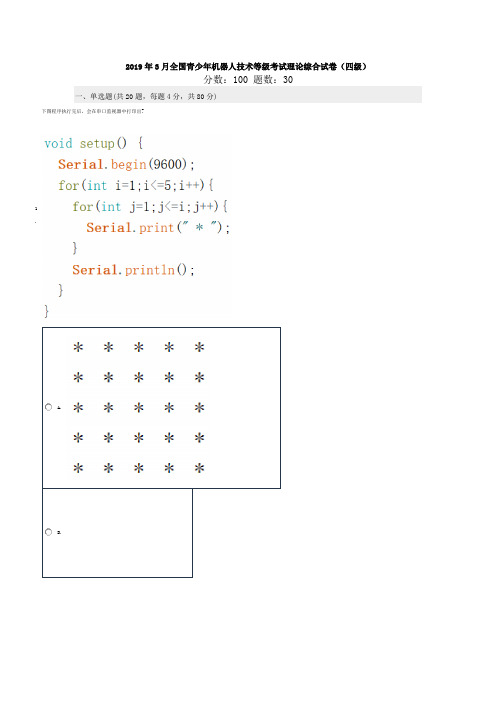
2019年3月全国青少年机器人技术等级考试理论综合试卷(四级)分数:100 题数:30一、单选题(共20题,每题4分,共80分)下图程序执行完后,会在串口监视器中打印出?1.A.C.D.试题编号:20190306105618681试题类型:单选题标准答案:***试题难度:一般2. 以下C语言指令中,正确的是?A.B.C.D.试题编号:20190306105618696试题类型:单选题标准答案:***试题难度:一般试题解析:***3. 机器人一般由执行机构、驱动装置、检测装置和控制系统以及复杂机械等组成。
Arduino主控板属于其中的哪一部分?试题编号:20190306105618540试题类型:单选题标准答案:***试题难度:4. Arduino的板载小灯是和几号引脚相连的?试题编号:20190306105618759试题类型:单选题标准答案:***试题难度:试题解析:***5. 运算符“=”是?试题编号:20190306105618665试题类型:单选题标准答案:***试题难度:6. Arduino UNO程序编写时,下列数据类型对应字节数正确的是?试题编号:20190306105618618试题类型:单选题标准答案:***试题难度:试题解析:***电路搭建如图所示,为Arduino上传程序后,LED小灯的效果是?7.试题编号:20190306105618993试题类型:单选题标准答案:***试题难度:一般试题解析:***如果一盏红色LED小灯,它的工作参数如下?8.我们想用Arduino控制该LED小灯,则理论上,串联的电阻不能低于?试题编号:20190306105618821试题类型:单选题标准答案:***试题难度:一般试题解析:***?通过电位器控制舵机的转动角度,部分程序如下,当电位器的返回值为0时,舵机的角度位置为9.试题编号:20190306105619011试题类型:单选题标准答案:***试题难度:一般试题解析:***10. 程序Serial.print(17, BIN)输出的结果是?试题编号:20190306105618649试题类型:单选题标准答案:***试题难度:试题解析:***11. 有关二极管的说法,错误的是?试题编号:20190306105618806试题类型:单选题标准答案:***试题难度:试题解析:***超声波传感器是从哪个引脚接受触发信号,开始工作的?12.试题编号:20190306105618774试题类型:单选题标准答案:***试题难度:一般试题解析:***13. 以下选项中,属于浮点类型的是?试题编号:20190306105618556试题类型:单选题标准答案:***试题难度:试题解析:***电路搭建如下,当光照射光敏电阻时,随着光照强度的增强,analogRead(A0)的返回值会如何变化?14.试题编号:20190306105619026试题类型:单选题标准答案:***试题难度:一般试题解析:***15. Arduino C语言中,十进制数的前缀是?试题编号:20190306105618571试题类型:单选题标准答案:***试题难度:试题解析:***16. 关于上拉电阻和下拉电阻的说法错误的是?试题编号:20190306105618790试题类型:单选题标准答案:***试题难度:试题解析:***关于图中的晶体管符号,说法错误的是?17.试题编号:20190306105618837试题类型:单选题标准答案:***试题难度:一般试题解析:***18. 以下四个符号中哪个是逻辑运算符?试题编号:20190306105618634试题类型:单选题标准答案:***试题难度:试题解析:***电路搭建如图所示,当按下按钮时Arduino板载小灯被点亮,在之后的程序中,if(?)里面的代码可以是?19.试题编号:20190306105618977 试题类型:单选题标准答案:***试题解析:***考生答案:C考生得分:***是否评分:已评分评价描述:***20. 1940年由科幻作家阿西莫夫所提出的“机器人三原则”中包括以下选项中的哪一条?试题编号:20190306105618524试题类型:单选题标准答案:***试题难度:一般试题解析:***考生答案:A考生得分:***是否评分:已评分评价描述:***二、多选题(共5题,每题2分,共10分)21. 在C语言编程中,将变量i的值增加1的方法有?试题编号:20190306105618712试题类型:多选题标准答案:***试题难度:试题解析:***考生答案:B|C|D考生得分:***评价描述:***22. 以下对C语言的描述,正确的是?试题编号:20190306105618587试题类型:多选题标准答案:***试题难度:试题解析:***考生答案:B|A|C考生得分:***是否评分:已评分评价描述:***23. 程序analogRead(A0)返回了650,请问在A0口上接的电子设备有可能是?试题编号:20190306105619042试题类型:多选题标准答案:***试题难度:试题解析:***考生答案:C|D考生得分:***是否评分:已评分评价描述:***下列晶体三极管负载连接电路图中,正确的有哪些?24.试题编号:20190306105618852试题类型:多选题标准答案:***试题难度:一般试题解析:***考生答案:A|D考生得分:***是否评分:已评分评价描述:***25. 以下C语言的系统关键字中,用于“分支结构”的有?试题编号:20190306105618727试题类型:多选题标准答案:***试题难度:试题解析:***考生答案:A|B考生得分:***是否评分:已评分评价描述:***三、判断题(共5题,每题2分,共10分)26. Arduino编程中setup()函数会在控制板上电后只运行一次?试题编号:20190306105618743试题类型:判断题标准答案:***试题难度:试题解析:***考生答案:错误考生得分:***是否评分:已评分评价描述:***27. Arduino主控板的ATmega328P芯片内部有上拉和下拉功能?试题编号:20190306105618868试题类型:判断题标准答案:***试题难度:试题解析:***考生答案:正确考生得分:***是否评分:已评分评价描述:***28. 如果执行程序analogWrite(3,128)后,用万用表测量3号引脚的电压,可能是2.5V?试题编号:20190306105619058试题类型:判断题标准答案:***试题难度:试题解析:***考生答案:错误考生得分:***是否评分:已评分评价描述:***29. 0xFF02FD是一个16进制数据?试题编号:20190306105618602试题类型:判断题标准答案:***试题难度:试题解析:***考生答案:正确考生得分:***是否评分:已评分评价描述:***30. Ardunio主控板的MCU内部0和1是通过高低电平来表示的?试题编号:20190306105618884试题类型:判断题标准答案:***试题难度:试题解析:***考生答案:正确考生得分:***是否评分:已评分评价描述:***。
1、在机器人编程中,以下哪个语句用于控制机器人前进一段距离?A. turnLeft(90)B. moveForward(100)C. moveBackward(50)D. stopRobot()(答案:B)2、关于机器人的传感器,下列说法错误的是?A. 传感器是机器人获取环境信息的重要工具B. 红外传感器可以检测障碍物的距离C. 光线传感器只能用于检测环境光照强度,不能用于避障D. 超声波传感器通过发射和接收超声波来测量距离(答案:C)3、在机器人任务规划中,以下哪个步骤是正确的先后顺序?A. 设计任务流程-> 编写代码-> 测试与调试-> 任务执行B. 编写代码-> 设计任务流程-> 测试与调试-> 任务执行C. 设计任务流程-> 测试与调试-> 编写代码-> 任务执行D. 编写代码-> 测试与调试-> 设计任务流程-> 任务执行(答案:A)4、关于机器人的驱动方式,下列哪种是常见的电动驱动方式?A. 液压驱动B. 气压驱动C. 直流电机驱动D. 弹簧驱动(答案:C)5、在机器人控制系统中,以下哪个组件负责处理传感器数据和执行控制算法?A. 电机B. 传感器C. 控制器D. 电源(答案:C)6、关于机器人的机械结构,下列说法正确的是?A. 机器人的机械结构越复杂,其功能就越强大B. 机器人的机械结构应尽可能简单,以提高稳定性和可靠性C. 机器人的机械结构与设计任务无关,只需考虑美观性D. 所有机器人的机械结构都是相同的(答案:B)7、在机器人编程中,以下哪个循环结构用于重复执行某段代码直到满足特定条件?A. for循环B. while循环C. if语句D. switch语句(答案:B)8、关于机器人的通信方式,下列哪种是无线通信方式?A. 串口通信B. SPI通信C. I2C通信D. 蓝牙通信(答案:D)。
202305 青少年等级考试机器人实操真题四级考试时间:60分钟总分:100 及格分:60一、问答题 (共1题,每题100分)1、实操考题(共1题,共100分)1. 主题:预警雷达器件:Atmega328P主控板1块,舵机1个,超声波传感器1个,LED灯1个及相应辅件。
以上模块也可使用分立器件结合面包板搭建。
任务要求:预警雷达主要由往复转动的舵机以及与舵机连接在一起的超声波传感器组成。
装置工作时,舵机在30度至150度之间往复转动。
在转动过程中,超声波传感器不断检测不同角度时前方障碍物的距离,LED灯用于信息指示。
主要任务要求如下:(1) 当超声波传感器检测的障碍物距离大于15厘米时,装置不做反应,舵机在30度至150度之间往复转动,LED灯处于呼吸灯状态;(2) 当超声波传感器检测的障碍物距离不大于15厘米时,舵机在该角度停止,LED灯闪烁,用于警示障碍物靠近,容易发生事故;(3) 当障碍物远离,且距离大于15厘米时,舵机继续开始往复摆动,LED灯恢复呼吸灯状态;(4) 控制程序采用Arduino C/C++代码编写;(5) 未作规定处可自行处理,无明显与事实违背即可。
说明:请考生在考试结束前,按照如下要求提交相关文件。
(1) 将程序放在一个文件夹中,压缩为1个“rar或zip”格式文件,并命名为:DJKS4_身份证号,大小5M以下;(2) 将程序文件通过“上传附件”按钮进行上传;(3) 程序编写过程中不得打开其它示例程序,不得使用图形化软件生成代码,如发现,实操成绩按照0分处理。
参考资料:舵机类库及常用成员函数如下,供参考。
舵机类库:头文件:Servo.h类库对象:Servo成员函数:attach(Pin) //指定引脚的关联引脚write(angle) //功能是让舵机转动到指定的角度【正确答案】一、评分组成1、电路搭设(20分)元器件:(1)装置中包含LED灯模块或LED灯;(2分)(2)装置中包含超声波传感器;(4分)(3)装置中包含舵机;(4分)电路搭设:(4)LED灯模块或LED灯与主控板正确连接;(2分)(5)超声波传感器与主控板正确连接;(4分)(6)舵机和主控板正确连接。