飞行控制律
- 格式:docx
- 大小:14.45 KB
- 文档页数:1

matlab典型飞机的飞行控制律设计-回复Matlab典型飞机的飞行控制律设计引言:随着航空技术的不断发展,飞行控制律设计在飞行器领域中变得越来越重要。
飞行控制律设计的目标是确保飞行器在不同的飞行阶段具有稳定性、灵敏性和可靠性。
在本文中,我们将使用Matlab软件进行典型飞机的飞行控制律设计,并介绍一些基本概念和步骤。
第一步:建立飞行动力学模型在飞行控制律设计中,首先需要建立飞行动力学模型。
该模型描述了飞行器的运动和动力特性,是设计控制律的基础。
常用的方法包括平面模型和三维模型,根据实际情况选择合适的模型。
在Matlab中,可以使用Simulink工具箱来建立这些模型。
第二步:选择控制器的结构控制器是用来实现期望的飞行特性的关键组件。
根据设计需求和目标,选择合适的控制器结构非常重要。
常见的控制器结构包括比例-积分-微分(PID)控制器和线性二次调节(LQR)控制器。
在Matlab中,可以使用Control System Toolbox来创建这些控制器。
第三步:系统辨识和参数估计在设计控制律之前,需要准确的飞行动力学模型。
然而,实际情况下,飞行器的动力学特性可能会随时间而变化。
因此,需要进行系统辨识和参数估计,以获取准确的模型。
Matlab提供了多种辨识工具和方法,例如系统辨识工具箱和优化工具箱。
第四步:设计控制律根据飞行器的特性和实际需求,设计有效的控制律非常重要。
这些控制律可以调整飞行器的姿态、轨迹和稳定性。
在Matlab中,可以使用反馈控制、前馈控制和状态观测器等技术来设计控制律。
第五步:仿真和优化在设计控制律之后,需要对其进行仿真和优化,以验证其性能和调整参数。
Matlab的Simulink工具箱提供了强大的仿真环境,可以模拟不同飞行条件下的飞行动态。
通过该仿真环境,可以评估控制律的性能并对其进行优化。
第六步:系统实现和验证最后一步是将设计的控制律应用到实际飞行器中,并验证其性能和可靠性。
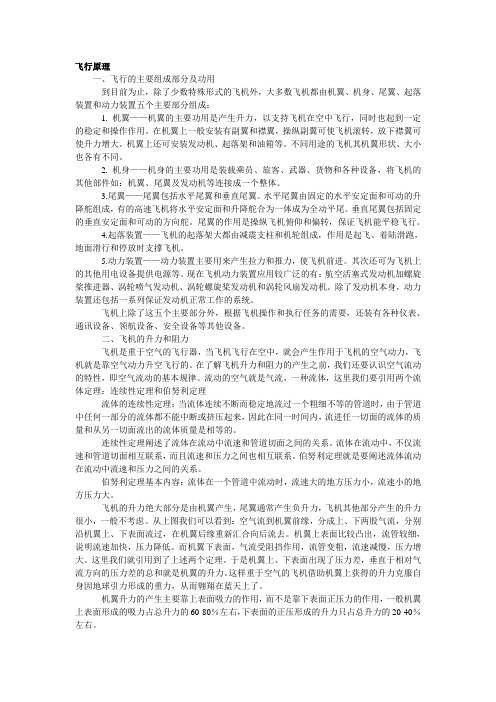
飞行原理一、飞行的主要组成部分及功用到目前为止,除了少数特殊形式的飞机外,大多数飞机都由机翼、机身、尾翼、起落装置和动力装置五个主要部分组成:1. 机翼——机翼的主要功用是产生升力,以支持飞机在空中飞行,同时也起到一定的稳定和操作作用。
在机翼上一般安装有副翼和襟翼,操纵副翼可使飞机滚转,放下襟翼可使升力增大。
机翼上还可安装发动机、起落架和油箱等。
不同用途的飞机其机翼形状、大小也各有不同。
2. 机身——机身的主要功用是装载乘员、旅客、武器、货物和各种设备,将飞机的其他部件如:机翼、尾翼及发动机等连接成一个整体。
3.尾翼——尾翼包括水平尾翼和垂直尾翼。
水平尾翼由固定的水平安定面和可动的升降舵组成,有的高速飞机将水平安定面和升降舵合为一体成为全动平尾。
垂直尾翼包括固定的垂直安定面和可动的方向舵。
尾翼的作用是操纵飞机俯仰和偏转,保证飞机能平稳飞行。
4.起落装置——飞机的起落架大都由减震支柱和机轮组成,作用是起飞、着陆滑跑,地面滑行和停放时支撑飞机。
5.动力装置——动力装置主要用来产生拉力和推力,使飞机前进。
其次还可为飞机上的其他用电设备提供电源等。
现在飞机动力装置应用较广泛的有:航空活塞式发动机加螺旋桨推进器、涡轮喷气发动机、涡轮螺旋桨发动机和涡轮风扇发动机。
除了发动机本身,动力装置还包括一系列保证发动机正常工作的系统。
飞机上除了这五个主要部分外,根据飞机操作和执行任务的需要,还装有各种仪表、通讯设备、领航设备、安全设备等其他设备。
二、飞机的升力和阻力飞机是重于空气的飞行器,当飞机飞行在空中,就会产生作用于飞机的空气动力,飞机就是靠空气动力升空飞行的。
在了解飞机升力和阻力的产生之前,我们还要认识空气流动的特性,即空气流动的基本规律。
流动的空气就是气流,一种流体,这里我们要引用两个流体定理:连续性定理和伯努利定理流体的连续性定理:当流体连续不断而稳定地流过一个粗细不等的管道时,由于管道中任何一部分的流体都不能中断或挤压起来,因此在同一时间内,流进任一切面的流体的质量和从另一切面流出的流体质量是相等的。


飞行控制律的原理与应用1. 引言飞行控制律是指飞机飞行过程中,用来控制飞机姿态和飞行性能的控制算法。
飞行控制律的设计和应用对于飞机的稳定性、操纵性和安全性至关重要。
本文将介绍飞行控制律的基本原理和应用。
2. 飞行控制律的原理飞行控制律根据飞机的需求和动力学原理设计,主要包括姿态控制律、航向控制律和高度控制律等。
2.1 姿态控制律姿态控制律用于控制飞机的姿态,即飞机的俯仰角、滚转角和偏航角等。
常用的姿态控制律包括PID控制律和模型预测控制律等。
•PID控制律:PID控制律根据当前姿态误差、偏差的变化率和积分项来计算控制指令,实现飞机的姿态控制。
其中P项用于响应当前误差,I项用于消除系统偏差,D项用于抑制系统震荡。
•模型预测控制律:模型预测控制律基于飞机的数学模型,通过预测未来一段时间内的飞机姿态和控制效果来计算控制指令。
这种控制律能够更好地适应复杂的飞行动态。
2.2 航向控制律航向控制律用于控制飞机的航向角,使飞机保持特定航向。
常用的航向控制律包括比例控制律和模糊控制律等。
•比例控制律:比例控制律通过将当前航向角误差乘以比例增益来计算控制指令,实现飞机的航向控制。
比例增益决定了控制器对于航向误差的响应速度。
•模糊控制律:模糊控制律根据模糊推理原理,通过定义一系列模糊规则来计算控制指令。
模糊控制律具有较好的适应性和鲁棒性,在复杂的飞行环境中表现较好。
2.3 高度控制律高度控制律用于控制飞机的飞行高度,使飞机保持特定高度。
常用的高度控制律包括反馈控制律和前馈控制律等。
•反馈控制律:反馈控制律根据当前高度误差和变化率来计算控制指令,实现飞机的高度控制。
反馈控制律可以根据飞机的实际状态进行实时调整,以实现稳定的高度控制。
•前馈控制律:前馈控制律基于飞机的数学模型,通过预测未来一段时间内的高度变化来计算控制指令。
前馈控制律可以提前响应高度变化,具有较好的动态性能。
3. 飞行控制律的应用飞行控制律的应用广泛存在于飞机的自动驾驶系统和飞行操纵系统中。
第28卷 第4期航 空 学 报Vol 128No 14 2007年 7月ACTA A ERONAU TICA ET ASTRONAU TICA SIN ICA J uly 2007收稿日期:2006207218;修订日期:2007202205基金项目:航空科学基金(05E18005)通讯作者:纪多红E 2mail :jiduohong @ 文章编号:100026893(2007)0420930205ν2gap 度量及其在飞行控制律评估中的应用刘 林1,2,纪多红2,唐 强2(11北京航空航天大学自动化科学与电气工程学院,北京 100083)(21飞行自动控制研究所飞控部,陕西西安 710065)ν2gap Metric and Its Application to Clearance of Flight Control La wsL IU Lin 1,2,J I Duo 2ho ng 2,TAN G Qiang 2(11School of Automation Science and Electrical Engineering ,Beijing University ofAeronautics and Astronautics ,Beijing 100083,China )(21Department of Flight Control ,Flight Automatic Control Research Institute ,Xi ′an 710065,China )摘 要:传统控制律评估方法主要用于单输入单输出(SISO )系统,且对模型参数摄动考虑不够全面,针对这些不足,研究了ν2gap 度量方法。
在介绍系统广义稳定裕度相关概念的基础上,给出了ν2gap 度量的定义、特点和性质以及近似摄动模型的计算,提出ν2gap 度量评估控制律的步骤。
实例结果表明,该方法不仅克服了上述传统评估方法的缺陷,而且还有根据所求的各摄动影响情况忽略影响小的元素,以减少计算量及可以找到最坏情况下的参数摄动组合等优点。
matlab典型飞机的飞行控制律设计1.引言1.1 概述正文概述飞行控制律是飞机自动驾驶系统中的重要组成部分,通过设计飞行控制律可以实现对飞机的稳定性和操纵性的控制。
在过去的几十年中,随着飞机自动化技术的发展,飞行控制律设计已经成为飞机设计中不可或缺的环节。
本文旨在介绍MATLAB在典型飞机飞行控制律设计中的应用。
首先将从飞行控制律设计的原理入手,解释飞行控制律设计的基本概念和目标。
然后,将重点介绍MATLAB在飞行控制律设计中的应用,包括MATLAB 工具箱的使用和MATLAB编程的技巧。
最后,通过实验和案例分析,评估和总结飞行控制律设计的效果,并对未来的研究方向进行展望。
本文的主要目的是提供给研究者、工程师和学生一个全面了解MATLAB在飞行控制律设计中应用的指南,以及对飞行控制律设计的原理和方法有一个清晰的理解。
通过本文的学习和实践,读者可以掌握MATLAB在飞行控制律设计中的应用技能,提高自己在飞机设计和飞行控制领域的能力。
在接下来的章节中,我们将首先介绍飞行控制律设计的原理,包括传统的PID控制器和现代控制理论。
然后,我们将详细讨论MATLAB在飞行控制律设计中的应用,包括如何使用MATLAB工具箱进行控制律设计和仿真。
最后,我们将通过实验和案例,评估和分析设计结果,并对未来的研究方向进行展望。
在本文的结尾部分,我们将总结本文的主要内容并对未来的研究进行展望。
通过本文的阅读和学习,我们相信读者将能够深入了解飞行控制律设计中MATLAB的应用,并能在实际工程中灵活运用这些知识。
1.2文章结构文章结构部分主要介绍了文章的整体结构和各章节内容的概括。
这样可以帮助读者更好地理解文章的结构和组织,以便更好地阅读和理解文章的内容。
以下是关于文章结构的内容:文章结构:本文主要分为引言部分、正文部分和结论部分三个主要部分。
引言部分:引言部分首先对文章的主题进行概述,简要介绍了MATLAB飞行控制律设计的研究背景和意义,并阐述了文章的目的和重要性。
飞行控制律
一、手动增稳控制
副翼输出=遥控器副翼输出—滚转角速率 *Kd
升降舵输出 = 遥控器升降舵输出—俯仰角速率 *Kd
方向舵输出 = 遥控器方向舵输出—指向角速率 *Kd
以上均采用角速率负反馈增稳,其中Kd由地面站上传,三个参数可以互不相同。
二、手动姿态控制
滚转副翼控制:
期望滚转角=遥控器输出的副翼舵量
Error=期望滚转角-传感器测出的实际滚转角
新的滚转角速率=传感器测出的滚转角速率
PID控制律设计:
比例项=Kp * Error
积分项=上一次+这一次(Ki*Error,离散型)
微分项:
一阶微分项=Kd * 新的滚转角速率
二阶微分项=Kd*(新的滚转角速率-上一次滚转角速率)
副翼输出=比例项+积分项+微分项
其中,Kp,Ki,Kd均由地面站上传,可以实时地面站调参数。
升降舵、方向舵控制律同副翼。
三、手动角速率反馈控制
滚转副翼控制:
期望角速率=遥控器输出的副翼舵量
Error=期望角速率-传感器测出的实际角速率
新的滚转角速率=传感器测出的滚转角速率
PID控制律设计:
比例项=Kp* Error
积分项=这一次+上一次(Ki*Error,离散型)
微分项=Kd*(新的滚转角速率-上一次滚转角速率)
副翼输出=比例项+积分项+微分项
其中,Kp,Ki,Kd均由地面站上传,可以实时地面站调参数。
升降舵、方向舵控制律同副翼。
四、自主导航控制
获取目标航点信息:高度、导航角、
根据航点计算出。