控制回路参数整定(课堂PPT)
- 格式:ppt
- 大小:1009.50 KB
- 文档页数:23
Honeywell DCS 控制回路PID参数整定方法PID中的正反作用是针对:“现场值的变化趋势”与“PID控制输出值变化趋势”之间的关系。
例一:用PID调节器控制恒温炉的炉温。
这是一个典型的反作用调节。
如果炉温下降(现场值下降趋势),我们PID控制输出要增加输出量,来增加功率。
是增加的趋势。
两个趋势相反。
所以,是反作用。
例二:用PID调节器来控制冰库的温度。
如果冰库的温度在上升,我们PID调节的输出也要增加,增加制冷的功率。
两个趋势是相同的。
这就是正作用。
鉴于目前一联合装置仪表回路自控率比较低,大部分的回路都是手动操作,这样不但增加了操作员的工作量,而且对产品质量也有一定的影响,特编制了此PID参数整定方法。
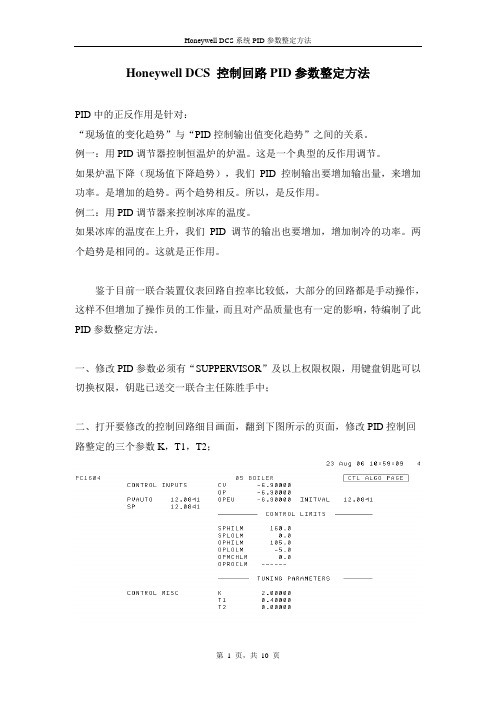
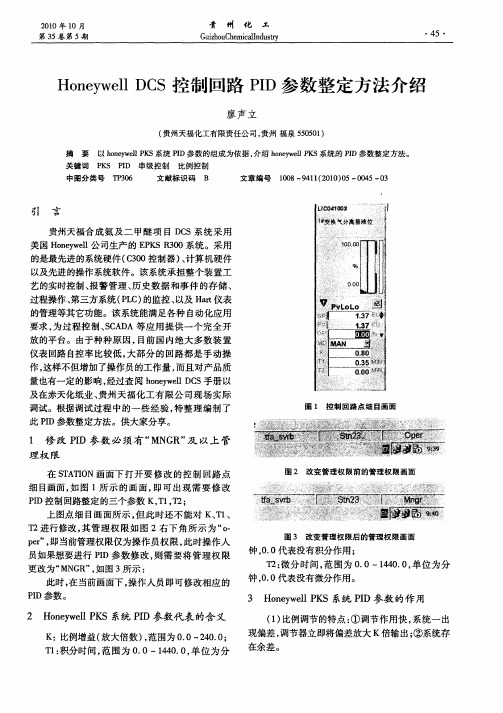
一、修改PID参数必须有“SUPPERVISOR”及以上权限权限,用键盘钥匙可以切换权限,钥匙已送交一联合主任陈胜手中;二、打开要修改的控制回路细目画面,翻到下图所示的页面,修改PID控制回路整定的三个参数K,T1,T2;三、PID参数代表的含义K:比例增益(放大倍数),范围为0.0~240.0;T1:积分时间,范围为0.0~1440.0,单位为分钟,0.0代表没有积分作用;T2:微分时间,范围为0.0~1440.0,单位为分钟,0.0代表没有微分作用。
四、PID参数的作用(1)比例调节的特点:1、调节作用快,系统一出现偏差,调节器立即将偏差放大K倍输出; 2、系统存在余差。
K越小,过渡过程越平稳,但余差越大;K增大,余差将减小,但是不能完全消除余差,只能起到粗调作用,但是K过大,过渡过程易振荡,K太大时,就可能出现发散振荡。
(2)积分调节的特点:积分调节作用的输出变化与输入偏差的积分成正比,积分作用能消除余差,但降低了系统的稳定性,T1由大变小时,积分作用由弱到强,消除余差的能力由弱到强,只有消除偏差,输出才停止变化。
(3)微分调节的特点:微分调节的输出是与被调量的变化率成正比,在引入微分作用后能全面提高控制质量,但是微分作用太强,会引起控制阀时而全开时而全关,因此不能把T2取的太大,当T2由小到大变化时,微分作用由弱到强,对容量滞后有明显的作用,但是对纯滞后没有效果。

基于dcs系统的控制回路和pid参数整定方法文章主题:基于DCS系统的控制回路和PID参数整定方法在工业控制领域,DCS(分散控制系统)被广泛应用于监控和管理生产过程,其中控制回路和PID参数的设置对系统稳定性和性能至关重要。
本文将从简单到复杂的角度,探讨基于DCS系统的控制回路和PID参数整定方法,帮助读者更深入地理解这一关键主题。
1. 了解控制回路的基本原理控制回路是工业自动化中常见的一种控制系统结构,其基本原理是通过传感器采集过程变量,经过控制器处理后输出控制信号,最终实现对被控对象的自动调节。
在DCS系统中,控制回路的联动控制能力对于多个被控对象的同步调节至关重要,因此在设计和实施控制回路时需考虑系统的整体性能和稳定性。
2. 理解PID控制器的作用和参数调节PID控制器是控制回路中常用的控制算法之一,它包括比例(P)、积分(I)、微分(D)三个参数,分别对应控制器对误差的比例、积分和微分响应。
在DCS系统中,PID控制器的参数整定对于控制回路的稳定性和动态性能至关重要。
合理的PID参数设置可以有效抑制系统震荡,提高控制精度和响应速度。
3. DCS系统中的控制回路实践应用在实际工程中,基于DCS系统的控制回路和PID参数整定需要结合具体的生产过程和被控对象特性进行综合考虑。
通过实际案例分析和调试经验共享,可以更好地帮助工程师理解控制回路调试的关键技术和注意事项。
在DCS系统中,控制回路的实践应用需要充分考虑系统的稳定性、鲁棒性和调节的灵活性。
总结与展望:通过本文的深入探讨,读者可以更全面地了解基于DCS系统的控制回路和PID参数整定方法。
在工业控制领域,控制回路的合理设计和PID参数的有效调节对于系统性能的优化至关重要。
未来,随着智能控制技术和工业互联网的发展,控制回路调节的研究和应用将迎来新的挑战和机遇。
个人观点:作为工业控制领域的专家,我深知控制回路和PID参数在DCS系统中的重要性。

H o n e y w e l l D C S控制回路P I D参数整定方法鉴于目前一联合装置仪表回路自控率比较低,大部分的回路都是手动操作,这样不但增加了操作员的工作量,而且对产品质量也有一定的影响,特编制了此PID参数整定方法。
一、修改PID参数必须有“SUPPERVISOR”及以上权限权限,用键盘钥匙可以切换权限,钥匙已送交一联合主任陈胜手中;二、打开要修改的控制回路细目画面,翻到下图所示的页面,修改PID控制回路整定的三个参数K,T1,T2;三、PID参数代表的含义K:比例增益(放大倍数),范围为0.0~240.0;T1:积分时间,范围为0.0~1440.0,单位为分钟,0.0代表没有积分作用;T2:微分时间,范围为0.0~1440.0,单位为分钟,0.0代表没有微分作用。
四、PID参数的作用(1)比例调节的特点:1、调节作用快,系统一出现偏差,调节器立即将偏差放大K倍输出; 2、系统存在余差。
K越小,过渡过程越平稳,但余差越大;K增大,余差将减小,但是不能完全消除余差,只能起到粗调作用,但是K过大,过渡过程易振荡,K太大时,就可能出现发散振荡。
(2)积分调节的特点:积分调节作用的输出变化与输入偏差的积分成正比,积分作用能消除余差,但降低了系统的稳定性,T1由大变小时,积分作用由弱到强,消除余差的能力由弱到强,只有消除偏差,输出才停止变化。
(3)微分调节的特点:微分调节的输出是与被调量的变化率成正比,在引入微分作用后能全面提高控制质量,但是微分作用太强,会引起控制阀时而全开时而全关,因此不能把T2取的太大,当T2由小到大变化时,微分作用由弱到强,对容量滞后有明显的作用,但是对纯滞后没有效果。
五、如果要知道控制回路的作用方式,可以进入控制回路的细目画面,进入下图所示页面:其中“CTLACTN”代表控制器作用方式,“REVERSE”表示反作用,“DIRECT”代表正作用。
六、控制器的选择方法(1)P控制器的选择:它适用于控制通道滞后较小,负荷变化不大,允许被控量在一定范围内变化的系统;(2)PI控制器的选择:它适用于滞后较小,负荷变化不大,被控量不允许有余差的控制系统;(3)PID控制器的选择:它适用于负荷变化大,容量滞后较大,控制质量要求又很高的控制系统,比如温度控制系统。
Honeywell DCS 控制回路PID参数整定方法鉴于目前一联合装置仪表回路自控率比较低,大部分的回路都是手动操作,这样不但增加了操作员的工作量,而且对产品质量也有一定的影响,特编制了此PID参数整定方法。
一、修改PID参数必须有“SUPPERVISOR”及以上权限权限,用键盘钥匙可以切换权限,钥匙已送交一联合主任陈胜手中;二、打开要修改的控制回路细目画面,翻到下图所示的页面,修改PID控制回路整定的三个参数K,T1,T2;三、PID参数代表的含义K:比例增益(放大倍数),范围为~;T1:积分时间,范围为~,单位为分钟,代表没有积分作用;T2:微分时间,范围为~,单位为分钟,代表没有微分作用。
四、PID参数的作用(1)比例调节的特点:1、调节作用快,系统一出现偏差,调节器立即将偏差放大K倍输出;2、系统存在余差。
K越小,过渡过程越平稳,但余差越大;K增大,余差将减小,但是不能完全消除余差,只能起到粗调作用,但是K过大,过渡过程易振荡,K太大时,就可能出现发散振荡。
(2)积分调节的特点:积分调节作用的输出变化与输入偏差的积分成正比,积分作用能消除余差,但降低了系统的稳定性,T1由大变小时,积分作用由弱到强,消除余差的能力由弱到强,只有消除偏差,输出才停止变化。
(3)微分调节的特点:微分调节的输出是与被调量的变化率成正比,在引入微分作用后能全面提高控制质量,但是微分作用太强,会引起控制阀时而全开时而全关,因此不能把T2取的太大,当T2由小到大变化时,微分作用由弱到强,对容量滞后有明显的作用,但是对纯滞后没有效果。
五、如果要知道控制回路的作用方式,可以进入控制回路的细目画面,进入下图所示页面:其中“CTLACTN”代表控制器作用方式,“REVERSE”表示反作用,“DIRECT”代表正作用。
六、控制器的选择方法(1)P控制器的选择:它适用于控制通道滞后较小,负荷变化不大,允许被控量在一定范围内变化的系统;(2) PI 控制器的选择:它适用于滞后较小,负荷变化不大,被控量不允许有余差的控制系统;(3) PID 控制器的选择:它适用于负荷变化大,容量滞后较大,控制质量要求又很高的控制系统,比如温度控制系统。