单回路控制系统
- 格式:ppt
- 大小:4.04 MB
- 文档页数:99
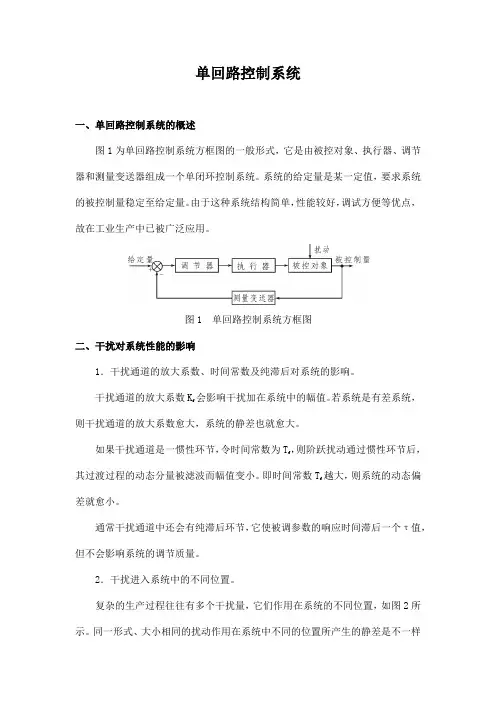
单回路控制系统一、单回路控制系统的概述图1为单回路控制系统方框图的一般形式,它是由被控对象、执行器、调节器和测量变送器组成一个单闭环控制系统。
系统的给定量是某一定值,要求系统的被控制量稳定至给定量。
由于这种系统结构简单,性能较好,调试方便等优点,故在工业生产中已被广泛应用。
图1 单回路控制系统方框图二、干扰对系统性能的影响1.干扰通道的放大系数、时间常数及纯滞后对系统的影响。
会影响干扰加在系统中的幅值。
若系统是有差系统,干扰通道的放大系数Kf则干扰通道的放大系数愈大,系统的静差也就愈大。
,则阶跃扰动通过惯性环节后,如果干扰通道是一惯性环节,令时间常数为Tf越大,则系统的动态偏其过渡过程的动态分量被滤波而幅值变小。
即时间常数Tf差就愈小。
通常干扰通道中还会有纯滞后环节,它使被调参数的响应时间滞后一个τ值,但不会影响系统的调节质量。
2.干扰进入系统中的不同位置。
复杂的生产过程往往有多个干扰量,它们作用在系统的不同位置,如图2所示。
同一形式、大小相同的扰动作用在系统中不同的位置所产生的静差是不一样的。
对扰动产生影响的仅是扰动作用点前的那些环节。
图2 扰动作用于不同位置的控制系统三、控制规律的选择PID控制规律及其对系统控制质量的影响已在有关课程中介绍,在此将有关结论再简单归纳一下。
1.比例(P)调节纯比例调节器是一种最简单的调节器,它对控制作用和扰动作用的响应都很快。
由于比例调节只有一个参数,所以整定很方便。
这种调节器的主要缺点是系统有静差存在。
其传递函数为:G C (s)= KP=δ1(1)式中KP为比例系数,δ为比例带。
2.比例积分(PI)调节PI调节器就是利用P调节快速抵消干扰的影响,同时利用I调节消除残差,但I调节会降低系统的稳定性,这种调节器在过程控制中是应用最多的一种调节器。
其传递函数为:GC (s)=KP(1+s1IT)=δ1(1+s1IT) (2)式中TI为积分时间。
3.比例微分(PD)调节这种调节器由于有微分的超前作用,能增加系统的稳定度,加快系统的调节过程,减小动态和静态误差,但微分抗干扰能力较差,且微分过大,易导致调节阀动作向两端饱和。
单回路控制系统的结构及基本原理单回路控制系统,听起来是不是有点高深?别担心,咱们慢慢来,把它说得简单明了。
想象一下,你家里的空调,夏天一开,立马变成了清凉的避风港。
这个过程背后,就是单回路控制系统在默默发挥作用。
它就像是一位调皮的管家,专门负责调节室内温度。
你觉得怎么样?挺酷吧?单回路控制系统到底是什么呢?其实就是一个简单的控制机制。
就像你在厨房里做饭,火候掌握得当,菜才能好吃。
系统通过传感器感知环境,像是人的“感觉器官”,然后根据设定的目标进行调整。
如果室温太高,控制系统就会给空调发信号,让它开起来。
这样一来,家里瞬间凉快。
是不是感觉有点像魔法?咱们再深入一下,单回路控制系统的基本原理其实就是反馈控制。
反馈控制就像是你骑自行车时的平衡,往左偏了就稍微向右打方向,保持稳定。
系统通过不断获取反馈数据,进行调整,保证温度不会过高或者过低。
要是没有这个反馈,空调就会像个无头苍蝇,根本不知道该怎么调节。
想象一下,如果空调开得太冷,你可能就得裹着毛毯看电视了,真是太折磨人了。
再说说控制环路,单回路控制系统的“主角”。
控制环路里有三个重要角色:传感器、控制器和执行器。
传感器就像你家里的眼睛,负责监测环境。
控制器是大脑,分析数据并做出决策。
执行器则是肌肉,负责实际操作。
三者协同合作,像是一场默契的舞蹈,缺一不可。
要是哪个环节出了问题,整个系统就会陷入混乱,真是让人无奈。
举个例子,想象一下你在夏天的炎热中,开着空调,舒舒服服地看着电视。
突然空调出问题,室内温度一下子飙升。
那种感觉就像是被烈日暴晒,简直要人命。
这个时候,如果控制系统能够及时反馈,让空调赶紧调整,那就完美了。
可一旦反馈失灵,你就得忍受那种汗流浃背的折磨,真是心烦意乱。
说到这里,咱们还得提一下这个系统的稳定性。
单回路控制系统就像是一道题,解出来才能得到最终答案。
假如反馈不准确,系统就可能过度反应,导致温度忽冷忽热,就像过山车一样刺激。
这样的结果可不是你想要的,毕竟生活需要一些“稳定感”,对吧?有了稳定的控制系统,大家才能安心享受生活。
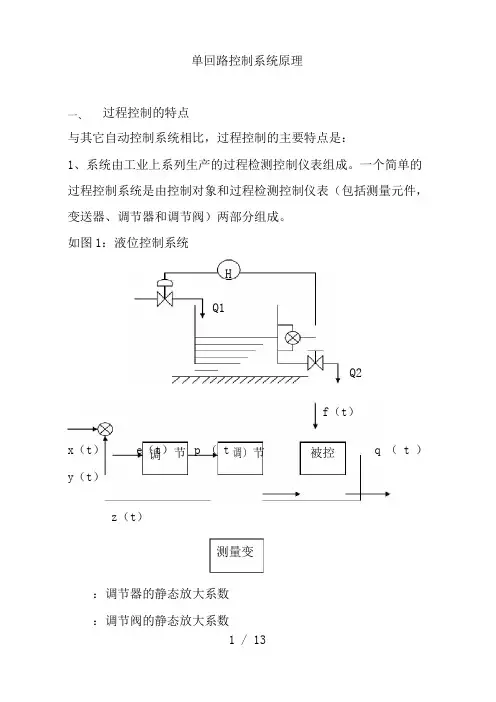
调单回路控制系统原理一、过程控制的特点与其它自动控制系统相比,过程控制的主要特点是:1、系统由工业上系列生产的过程检测控制仪表组成。
一个简单的过程控制系统是由控制对象和过程检测控制仪表(包括测量元件,变送器、调节器和调节阀)两部分组成。
如图1:液位控制系统HQ1Q2f(t)x(t)e(t)节p(t调)节被控q(t)y(t)z(t)测量变:调节器的静态放大系数:调节阀的静态放大系数K:被控对象的静态放大系数:变送器的静态放大系数2、被控对象的设备是已知的,对象的型式很多,它们的动态特性是未知的或者是不十分清楚的,但一般具有惯性大,滞后大,而且多数具有非线性特性。
3、控制方案的多样性。
有单变量控制系统、多变量控制系统;有线性系统、有非线性系统、;有模拟量控制系统、有数字量控制系统,等等。
这是其它自动控制系统所不能比拟的。
4、控制过程属慢过程,多半属参量控制。
即需对表征生产过程的温度、流量、压力、液位、成分、等进行控制。
5、在过程控制系统中,其给定值是恒定的(定值控制)或是已知时间的函数(程序控制)。
控制的主要目的是在于如何减少或消除外界扰动对被控量的影响。
工业生产要实现生产过程自动化,首先必须熟悉生产过程,掌握对象特点;同时要熟悉过程参数的主要测量方法,了解仪表性能、特点,根据生产工艺要求和反馈控制理论的分析方法,合理正确地构建过程控制系统;并且通过改变调节仪表的特性参数,使系统运行在最佳状态。
过程控制系统的品质是由组成系统的对象和过程检测仪表各环节的特性和系统的结构所决定的。
二、单回路控制系统原理如图1所示单回路控制系统由对象、测量变送器、调节器、调节阀等环节组成。
由于系统结构简单,投资少,易于调整、投运,又能满足一般生产过程的控制要求,所以应用十分广泛。
单回路控制系统的设计原则同样适用于复杂控制系统的设计,控制方案的设计和调节器整定参数值的确定,是系统设计中的两个重要内容。
如果控制方案设计不正确,仅凭调节器参数的整定是不可能获得较好的控制质量的;反之,如果控制方案设计很好,但是调节器参数整定不合适,也不能使系统运行在最佳状态。
单回路控制系统实验报告一、引言单回路控制系统是一种常见的控制系统,它由传感器、执行器、控制器和被控对象组成,用于实现对被控对象的精确控制。
本实验旨在通过搭建一个简单的单回路控制系统,探究其基本原理和性能特点。
二、实验目的1.了解单回路控制系统的基本组成和工作原理;2.熟悉传感器、执行器和控制器的选择和连接方法;3.掌握控制系统的参数调节方法;4.分析和评估单回路控制系统的性能。
三、实验器材和材料1.传感器:温度传感器、压力传感器等;2.执行器:电机、液压缸等;3.控制器:PLC、单片机等;4.被控对象:温度控制系统、压力控制系统等;5.连接线、电源等实验器材。
四、实验步骤1.根据实验要求选择适合的传感器、执行器和控制器,并进行连接;2.搭建单回路控制系统,确保传感器能够正确获取被控对象的状态,并传输给控制器;3.调节控制器参数,使得执行器能够根据被控对象的状态做出相应动作;4.观察和记录被控对象的状态变化,并进行分析;5.根据实验数据评估单回路控制系统的性能。
五、实验结果与分析通过实验我们发现,在单回路控制系统中,传感器的准确性对系统的控制精度起着关键作用。
若传感器的测量误差较大,则控制器会根据错误的数据做出误判,导致执行器产生错误的动作,影响了系统的稳定性和精度。
因此,在选择传感器时应注意其测量精度和可靠性。
控制器的参数调节也对系统性能有重要影响。
通过调节控制器的比例、积分和微分参数,可以改变控制系统的响应速度和稳定性。
比例参数的增大会加快系统的响应速度,但可能引起振荡;积分参数的增大会减小系统的稳态误差,但可能导致系统的超调;微分参数的增大会提高系统的稳定性,但可能引起噪声干扰。
因此,在调节控制器参数时需要综合考虑系统的要求和特性。
六、实验总结本实验通过搭建单回路控制系统,深入理解了其基本原理和性能特点。
我们了解到传感器、执行器和控制器在控制系统中的重要作用,以及参数调节对系统性能的影响。
通过实验数据的分析和评估,我们可以进一步优化单回路控制系统,提高其控制精度和稳定性。
DCS单回路控制系统设计资料讲解DCS,即分散控制系统,是一种基于微处理器的工业控制系统,广泛应用于化工、电力、石油等领域。
单回路控制系统是DCS系统中的一种常用架构,主要用于单个设备或过程的控制。
单回路控制系统的设计资料包括以下几个方面:1.系统结构:在单回路控制系统设计资料中,首先需要明确系统的总体架构和组成部分。
一般来说,单回路控制系统由传感器、执行器、控制器和人机界面组成。
传感器用于采集过程变量,执行器用于控制过程变量,控制器负责执行控制算法,人机界面则用于实现操作和监视。
2.控制策略:在单回路控制系统设计资料中,需要明确应用的控制策略。
常用的控制策略包括比例控制、积分控制、微分控制和模糊控制等。
根据具体的应用需求和控制对象的特性,选择合适的控制策略以实现稳定、准确的控制。
3.控制算法:在单回路控制系统设计资料中,需要详细描述控制器的工作原理和控制算法。
控制算法是控制器的核心部分,它根据输入的传感器信号和输出的执行器信号,通过运算和判断来实现过程变量的控制。
常见的控制算法有PID算法、模糊控制算法等。
4.通信协议:在单回路控制系统设计资料中,需要考虑通信协议的选择。
DCS系统是分布式控制系统,需要通过网络将各个部分连接起来,实现相互之间的数据交换和协同控制。
常用的通信协议有MODBUS、OPC等。
5.安全性与可靠性:在单回路控制系统设计资料中,需要考虑系统的安全性和可靠性。
安全性包括防止非法操作和保护系统免受外部攻击,可靠性包括系统硬件和软件的稳定性和可用性。
设计资料中需要详细说明安全和可靠性措施,例如设备的备份和冗余、数据的备份和恢复策略等。
6.软件架构:在单回路控制系统设计资料中,需要描述控制系统的软件架构。
软件架构包括了操作系统、控制算法、通信协议的实现等部分。
设计资料中需要详细描述软件的结构和模块之间的关系。
7.硬件配置:在单回路控制系统设计资料中,需要描述控制系统的硬件配置。
硬件配置包括了各个模块的型号和数量、布线方式、电源要求等。
单回路控制系统整定方法**《单回路控制系统整定方法,看这一篇就够啦!》**嘿,朋友!今天我要跟你唠唠单回路控制系统整定的方法,这可是个超有用的技能哦!首先,咱们得搞清楚啥是单回路控制系统。
你就把它想象成一个“固执的小家伙”,它的任务就是按照咱们设定的规则,稳稳地控制着某个过程或者设备。
比如说,控制水温保持在一个特定的温度,或者让机器的转速一直稳定在某个值。
那接下来,咱们就开始整定啦!第一步,观察系统特性。
这就好比你要了解一个新朋友的脾气一样。
看看这个系统是反应快还是慢,是容易激动还是比较沉稳。
比如说,如果系统对输入的变化反应超级快,就像你一喊“开饭啦”,家里的小孩立马冲到饭桌前,那这就是个比较灵敏的系统;要是系统反应慢,就像你叫你那爱睡懒觉的朋友起床,喊了好几遍才有动静,那这就是个迟钝的系统。
第二步,选择整定方法。
这就像选武器一样,得选趁手的。
常见的有 Ziegler-Nichols 法、临界比例度法等等。
比如说 Ziegler-Nichols 法,就像是一把通用的宝剑,大多数情况都能派上用场;临界比例度法呢,就像是一把特制的匕首,在特定的场合能发挥奇效。
第三步,进行初步整定。
这时候就开始动手调试啦!先设定一些初始参数,就像给这个“小家伙”定个初步的规矩。
比如说,设定一个比例增益,想象这就是给它的力量大小。
如果一开始设定得太小,那系统就像没吃饱饭一样,干活没力气;要是设定得太大,系统又像打了鸡血,兴奋过头,乱了套。
第四步,观察系统响应。
这就好比你在旁边看着这个“小家伙”干活,看看它干得好不好。
是动作太快太猛,还是慢悠悠的不给力。
如果系统的响应曲线像过山车一样上上下下,那肯定不行,咱得继续调整;要是像一条平稳的直线,那恭喜你,差不多成功啦!第五步,精细调整。
这一步就像给一幅画做最后的修饰,让它更加完美。
根据系统的响应,微调那些参数,比例增益、积分时间、微分时间等等,就像给“小家伙”一点点纠正行为习惯,让它越来越听话。
第四节单回路控制系统在热工生产过程控制中,最基本的且应用最多的单回路控制系统,其他各种复杂控制系统都是在单回路系统的基础上发展起来的,而且许多复杂控制系统的整定都利用了单回路控制系统的整定方法,可以说单回路控制系统是过程控制系统的基础。
一、单回路控制系统的组成及初步设计单回路控制系统的组成原理方框图如图3-44所示,它是仅有一个测量变送器,一个调节器和一个执行器(包括调节阀),连同被控对象组成的闭环负反馈控制系统。
图1-26 单回路控制系统组成原理方框图1、被调量的选择在图1-26中,被调量是表征生产过程是否符合工艺要求的物理量,在热工生产过程中主要是温度、压力、流量、化学成分等。
一般情况下,欲维持的工艺参数就是系统的被调量,如火力发电厂锅炉过热蒸汽温度控制系统的任务就是维持锅炉过热器出口蒸汽温度,所以汽温控制系统的被调量就是过热器出口汽温。
但是生产过程中,有些工艺参数目前还没有获得直接的快速测量手段,如火电厂进入磨煤机的原煤干燥程度的测量。
这种情况下往往采用间接测量手段,如采用磨煤机入口介质的温度来代表原煤的干燥程度。
以间接参数作为系统的被调量,要求被调量与实际所需维持的工艺参数之间为单值函数关系,否则要采取相应的补偿措施。
对于那些虽有直接测量手段,但所测得的信号过于微弱或迟延较大的情况,不如选用间接参数作为系统的被调量。
为提高测量的灵敏度,减小迟延,应采用先进的测量方法,选择合理的取样点,正确合理地安装检测元件。
2、控制量的选择选择什么样的控制量去克服扰动对被调量的影响呢?原则上是选择工艺上允许作为控制手段的变量作为控制量,一般不应选择工艺上的主要物料或不可控制的变量作为控制量。
例如:火力发电厂锅炉负荷控制系统,其被调量是主蒸汽压力,而影响主蒸汽压力的主要因素是汽轮机进汽量和锅炉燃料量,前者是电力生产要求所确定的,因而不能作为控制量,而只能选择燃料量作为控制量。
给定值 调节器 对象被调量 - μ 扰动 扰动 图1-28 单回路调节系统 3、控制通道和扰动通道单回路控制系统的组成如图1-27所示,图中W 01(s )为对象的传递函数,它是包括了检测元件、测量变送器、执行机构和调节阀在内的广义对象特性;W c (s )为调节器的传递函数,D 为扰动信号,W 02(s )为被调量与扰动信号间的传递函数。
DCS单回路控制系统设计资料讲解DCS(Distributed Control System)单回路控制系统是指由多个控制器组成的系统,每个控制器负责一个回路的控制。
本文将对DCS单回路控制系统的设计资料进行讲解,包括系统结构、硬件配置、软件设计等。
一、系统结构DCS单回路控制系统的基本结构包括控制器、输入/输出(I/O)模块、通信网络和上位机。
控制器是系统的核心部分,负责接收传感器输入信号、控制执行器输出信号,并根据设定值和反馈信号进行控制。
每个回路对应一个控制器,回路之间相互独立。
I/O模块用于与外部设备进行数据交换,包括接收传感器信号、控制执行器、报警、人机界面等功能。
通信网络用于连接各个控制器和上位机,实现数据的共享和交互。
上位机用于监控、配置和管理整个系统。
二、硬件配置DCS单回路控制系统的硬件配置包括控制器、I/O模块和传感器/执行器。
控制器通常由中央处理器(CPU)、存储器、输入/输出接口等组成,其性能和规模决定了系统的处理能力和扩展性。
I/O模块负责将外部设备的数据转换为数字信号,并通过通信网络传输给控制器。
传感器用于采集控制对象的状态信息,执行器用于对控制对象施加控制信号。
三、软件设计DCS单回路控制系统的软件设计包括控制算法、通信协议和用户界面。
控制算法按照系统的要求,如PID控制算法、模糊控制算法等,对控制器进行程序设计。
通信协议用于控制器之间和上位机之间的数据交换。
用户界面提供操作界面和显示功能,以便用户能够实时监控和操作系统。
在软件设计中,需要考虑到系统的稳定性、可靠性和实时性。
稳定性是指系统在受到扰动时能够恢复到稳态的能力;可靠性是指系统能够按照要求工作,不出现故障;实时性是指系统能够对输入信号进行及时响应,使控制效果更好。
四、设计资料要求DCS单回路控制系统的设计资料需要包括系统的拓扑结构图、硬件配置表、控制算法程序、通信协议、用户界面设计以及相关参数的设置。
拓扑结构图描述了系统各组成部分之间的连接关系;硬件配置表包括了控制器、I/O模块、传感器/执行器的型号、数量和安装位置;控制算法程序描述了对控制器的编程要求;通信协议用于实现不同组成部分之间的数据交互;用户界面设计根据实际需求进行设计,以方便用户使用和操作;相关参数的设置是指对系统各项参数进行设定,如控制周期、采样周期等。